(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоприемник движущихся изображений (его варианты) | 1981 |
|
SU1003383A1 |
| ФОТОПРИЕМНИК ДВИЖУЩИХСЯ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2032992C1 |
| УСТРОЙСТВО ПАНОРАМНОГО НАБЛЮДЕНИЯ "ДЕНЬ-НОЧЬ" И ТЕЛЕВИЗИОННАЯ КАМЕРА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2555855C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА ПАНОРАМНОГО ТЕЛЕВИЗИОННОГО НАБЛЮДЕНИЯ С ПОВЫШЕННОЙ ЧУВСТВИТЕЛЬНОСТЬЮ НА ВНЕШНЕЙ ПЕРИФЕРИИ КОЛЬЦЕВОГО ИЗОБРАЖЕНИЯ | 2014 |
|
RU2564091C1 |
| Фотоприемник движущихся изображений | 1988 |
|
SU1619419A2 |
| КОМПЬЮТЕРНАЯ СИСТЕМА ПАНОРАМНОГО ТЕЛЕВИЗИОННОГО НАБЛЮДЕНИЯ ЦВЕТНОГО ИЗОБРАЖЕНИЯ | 2014 |
|
RU2570348C1 |
| Фотоприемник движущихся изображений | 1987 |
|
SU1499528A2 |
| Фотоприемник движущегося изображения | 1974 |
|
SU587637A1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА ПАНОРАМНОГО ТЕЛЕВИЗИОННОГО НАБЛЮДЕНИЯ С ПОВЫШЕННОЙ ЧУВСТВИТЕЛЬНОСТЬЮ | 2014 |
|
RU2564678C1 |
| УСТРОЙСТВО ПАНОРАМНОГО ТЕЛЕВИЗИОННОГО НАБЛЮДЕНИЯ | 2015 |
|
RU2579005C1 |
Изобретение относится к телевизионным системам контроля и слежения, в частности к устройствам выделения подвижных объектов, находящихся в поле зрения устройства. Целью изобретения является повы- шение быстродействия устройства. Устройство содержит объектив и фотоприемник, расположенный в фокальной плоскости объектива и включающий в себя две идентичные матрицы светочувствительных элементов, объединенных в линейки межэлементной зарядовой связью, два регистра 5, 6 и включенные между ними линии задержки. Новым в устройстве является введение блока сравнения и выбор времени задержки каждой линии задержки таким, чтобы при сравнении сигналов с первой и второй матриц компенсировались геометрические искажения, вносимые дисторсией объектива. Такое техническое решение обеспечивает работоспособность устройства без увеличения пространственного порога выделения подвижных объектов и тем самым повышает его быстродействие. 2 ил.
Изобретение относится к телевизионным системам контроля и слежения, в частности, к устройствам выделения подвижных объектов, находящихся в поле зрения устройства.
Известно оптоэлектронное устройство, содержащее объектив и фотоприемник, расположенный в фокальной плоскости объектива и включающий в себя матрицы светочувствительных элементов, объединенных в линейки межэлементной зарядовой связью.
Известен фотоприемник движущегося изображения, содержащий матрицу светочувствительных элементов, объединенных в линейки межэлементной зарядовой связью, генератор тактовых импульсов, подключенный к матрице, датчик скорости движения изображения, подключенный к генератору
тактовых импульсов. В фотоприемнике обеспечивается синхронизация движения изображения и зарядовых пакетов в матрице.
Известен также фотоприемник движущихся изображений, содержащий первую и вторую матрицы, первый и второй регистры, инвертор, подключенный к выходу первой матрицы, линию задержки, соединенную с выходом инвертора, генератор тактовых импульсов, подключенный к матрицам и линии задержки, датчик скорости движения изображения, соединенный с генератором. Считанные с первой матрицы сигналы инвертируются, задерживаются и вводятся во вторую матрицу, В результате сигналы от объектов, неподвижных относительно фона, взаимно уничтожаются. Сигналы от объектов, подвижных относительно фона, оказы,Х|
О О О
Јь
ваются смещенными друг относительно друга и проходят на выход фотоприемника.
Использование известного фотоприемника совместно со светосильным широкоугольным объективом приводит к увеличению поля зрения и позволяет контролировать поля увеличенных размеров. Однако светосидльные широкоугольные объективы, как правило, обладают повышенными геометрическими искажениями из-за дисторсии, которая растет пропорционально tg со3 , где со- угол наклона светового пучка к оптической оси объектива. Повышенная дисторсия приводит к тому, что движение изображения объекта через матрицы происходит по траектории, отличной от прямолинейной и с переменной скоростью, не совпадающей со скоростью движения зарядовых пакетов в матрицах. Движение изображения объекта, неподвиж- ного по отношению к фону, приобретает те же свойства, что и движение изображения объекта, подвижного относительно фона. В результате объект выделяется как подвижный, т.е. происходит сложное срабатыва- ние. Снижение количества ложных срабатываний возможно за счет увеличения пространственного порога 6 см, на который должен сместиться подвижный объект. Такой подход требует увеличения времени, в течение которого объект находится в поле зрения устройства (уменьшения скорости основания), а это, в свою очередь, ухудшает быстродействие.
Целью изобретения является увеличе- ние быстродействия.
Цель достигается тем, что, устройство, содержащее первую и вторую матрицы светочувствительных элементов, элементы матриц объединены в линейки межэлемент- ной зарядовой связью, первый регистр, вход которого подключен к выходу первой матрицы, второй регистр, линии задержки, генератор тактовых импульсов, выход которого подключен ко входам матриц и линий задержки, датчик скорости движения изображения, подключенный к управляющему входу генератора тактовых импульсов, введен блок сравнения, выходы которого подключены соответственно ко второму регистру и выходу второй матрицы, а линии задержки включены между одноименными элементами регистров.
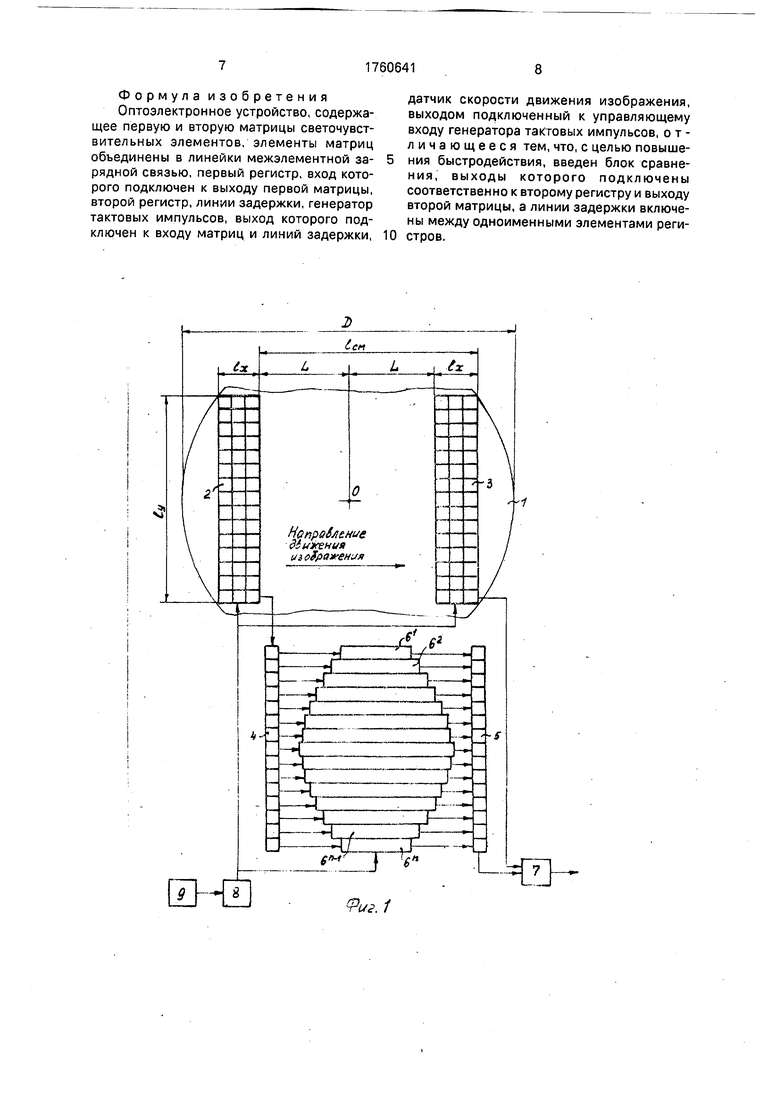
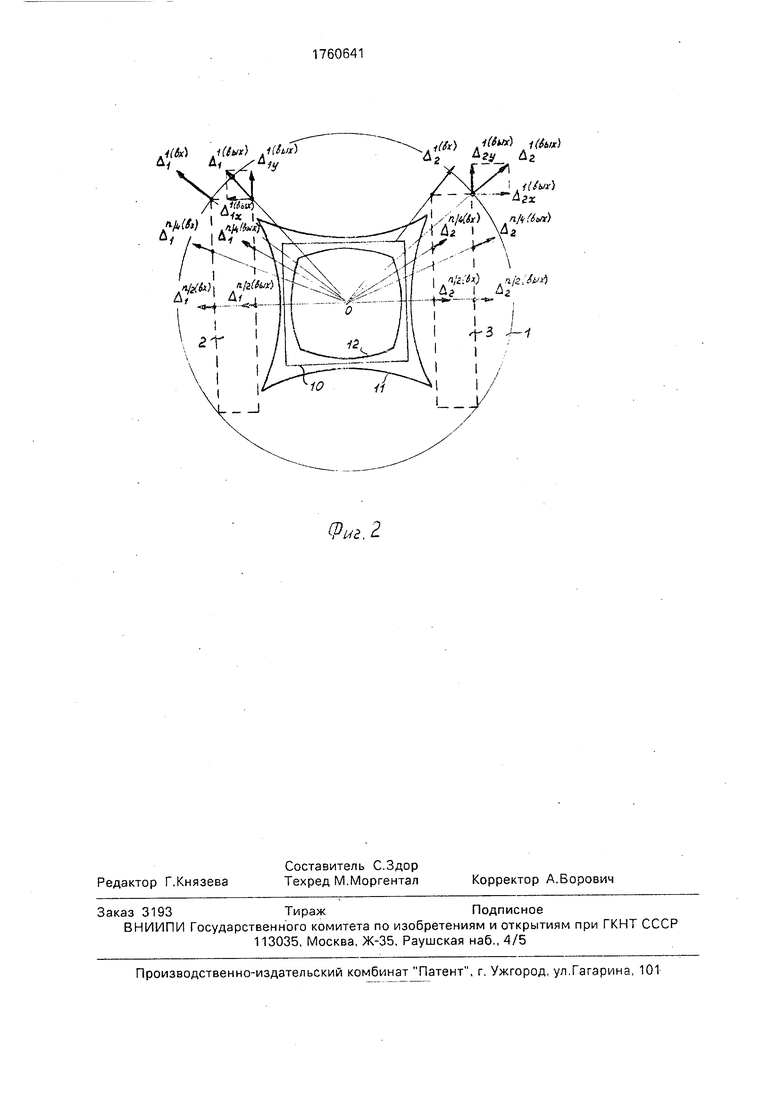
На фиг. 1 представлена структурная схема оптоэлектронного устройства; на фиг, 2 изображены дисторсионные искажения объектива.
Оптоэлектронное устройство содержит объектив (на чертеже не показан), формиру
0 5
0
5
0
ющий оптическое изображение в пределах круглого линейного поля 1 зрения диаметром D. В фокальной плоскости объектива в пределах поля зрения расположены первая матрица 2 и вторая матрица 3 светочувствительных элементов, объединенных в линейки межэлементной зарядовой связью. Каждая матрица содержит п линеек по m элементов в линейке. Выход первой матрицы соединен с первым регистром 4. Между первым регистром и вторым регистром 5 включены п линий 6 ...6П задержки. Выходы второго регистра 5 и второй матрицы 3 подключены к двум входам блока 7 сравнения. Такой блок может быть реализован, например, в виде последовательно соединенных сумматора и пороговой схемы, причем сигнал на первый вход сумматора подается непосредственно, а на второй - через инвертор. Управляющие входы матриц 2, 3 и.линий 6 ...6П задержки соединены с генератором 8 тактовых импульсов, который, в свою очередь, подключен к датчику 9 скорости движения изображения.
Матрицы 2 и 3 являются идентичными, имеют размеры lx x ly (mxn элементов) и размещены таким образом, что расстояние между выходными элементами матриц (расстояние, которое обеспечивает смещение изображения подвижного объекта относительно фона на величину б см) составляет I см. При этом матрицы отстоят от центра О линейного поля зрения на расстояние L. Кроме линеек светочувствительных элементов, расположенных параллельно направлению движения изображения, каждая из матриц содержит также обрамляющую электронику (на чертеже не показана), включающую в себя генераторы, формирователи уровней, усилители и другие элементы, обеспечивающие работу матриц.
На фиг. 2 схематически изображены дисторсионные искажения объектива. Здесь обозначаноя: 10 - изображение квадрата, формируемое идеальным объективом; 11 - изображение квадрата, формируемое реальным объективом с положительной дис- торсией (подушкообразные искажения), 12 - изображение квадрата, формируемое реальным объективом с отрицательной дис- торсией (бочкообразные искажения). Символом Д обозначены дисторционные искажения. При этом первый нижний индекс обозначает номер матрицы, первый верхний индекс обозначает номер линейки (1-я, n/4-я и n/2-я), индексы вх и вых обозначают входной (1-й) и выходной (гл-й) элементы линейки, индексы х и у обозначают соответствующие составляющие дистор- сионных искажений.
Оптоэлектронное устройство работает следующим образом.
Контролируемое поле, содержащее подвижные и неподвижные объекты, при помощи объектива проектируется на матрицы 2, 3. Вследствие движения основания, на котором расположено устройство, проектируемое изображение является движущимся. Величина и направление движения основания предполагаются неизменными.
При попадании изображения объекта на светочувствительный элемент в нем под действием света формируется зарядовый пакет. За счет манипуляции напряжениями обеспечивается перетекание зарядовых пакетов из элемента в элемент вдоль линейки. Скорость движения пакетов задается тактовыми импульсами с генератора 8, управляемого сигналами датчика 9. Управление осуществляется таким образом, чтобы зарядовые пакеты двигались вдоль линеек со скоростью, равной скорости движения изображения /из. За время движения зарядовых пакетов вдоль линеек матриц происходит накопление зарядов, пропорциональных освещенности соответствующих участков изображения. Сигналы, считанные с матрицы 2 через регистр 4 поступает в линии б1...6 задержки.
Задержанные сигналы с матрицы 2 через регистр 5, а также сигналы непосредственно с выхода матрицы 3 поступают в блок 7, где сравниваются друг с другом. Сигналы от объекта, не изменившего свое положение относительно фона, взаимно уничтожаются. Сигналы от объекта, положение которого относительно фона изменилось на величину б см за время перемещения изображения на расстояние I см, т.е. сигналы на входе блока 7, разнесенные на некоторый временной интервал, проходят на его выход и таким образом объект выделяется как подвижный.
Наличие дисторсионных искажений, как было указано выше, требует увеличения пространственного порога 5см, что влечет за собой уменьшение скорости Уиз, и, как следствие, ухудшения быстродействия. В устройстве за счет введения линий б1...6 задержки, имеющих различные времена задержек, уменьшается потребное значение см и повышается быстродействие. Выбор времени задержки конкретной линии заключается в следующем.
Исходя из конструктивных характеристик и используя треугольники, изображенные на фиг. 2, определяется линейный радиус RIJ, на котором расположен j-й светочувствительный элемент i-й линейки (1 п, 1 J m)
RIJ- Vxij 2 + yij 2 ,
где xi, yij - катеты соответствующих треугольников, вычисляемые по формулам xij L + Ix - Лэл для первой матрицы Xjj L + эл для второй матрицы
УЦ
эл при i п/2
У U I
ЭЛ
при i n/2
где 1Эл - размер светочувствительного эле- 15 мента.
Значение дисторсии в месте расположения j-ro элемента i-й линейки
Д« Kg tg arctg ( Kg ф3 ,
где Кд - коэффициент дисторсии. Составляющие дисторсии
V A JX|
Составляющие дисторсии А/ в месте расположения выходных элементов первой
и второй матриц (Д, С3 ) и соответственно) имеют одинаковые знаки и примерно равны по величине. Они практически не влияют на работу устройства, т.к. не создают видимости смещения неподвижных объектов относительно фона.
Составляющие дисторсии A lj в месте расположения выходных элементов первой
и второй матриц (Aix |(ЕЬК и Дгх соответственно) имеют противоположные знаки и создают видимость смещения неподвижных объектов относительно фона. Учет значений Aix () и Дгх ( при выборе времен задержек линий 6 ...бп исключает это вредное влияние.
Время задержки i-й линии задержки при положительной дисторсии объектива
равно
Ti ICM - (Д1Х () + Д2Х ())
/
VH3
при отрицательной дисторсии объектива т ICM + (Д1Х () + As ())
VM3
Такой выбор времен задержек даже при наличии значительных дисторсионных иска- жений приводит к тому, что сигналы от объектов, неподвижных относительно фона, поступают одновременно на вход блока 7 и взаимно уничтожаются, а сигналы от подвижных объектов проходят на выход блока 7.
Формула изобретения Оптоэлектронное устройство, содержащее первую и вторую матрицы светочувствительных элементов, элементы матриц объединены в линейки межэлементной зарядной связью, первый регистр, вход которого подключен к выходу первой матрицы, второй регистр, линии задержки, генератор тактовых импульсов, выход которого подключен к входу матриц и линий задержки,
1х
Истребление
ЗЗихения
uiO$pe#eHJ
0
датчик скорости движения изображения, выходом подключенный к управляющему входу генератора тактовых импульсов, отличающееся тем, что, с целью повышения быстродействия, введен блок сравнения, выходы которого подключены соответственно к второму регистру и выходу второй матрицы, а линии задержки включены между одноименными элементами регистров.
fx
Риг. 1
.Kb) .i(t) Jtfvu
/уг, 2
tfft) X wd 1(&«) Д P &гу Л г
. 1 (7мг)
-4гх
flfy йТ)
A 2
Л I
№) .iis.Jvti && I г -И-f i
| Пресс Ф.П | |||
| Формирователи видеосигнала на приборах с зарядовой связью | |||
| М.: Радио и связь, 1981, стр | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
