Фиь /
Изобретение относится к телевизионным системам контроля и слежения, в частности к устройствам выделения подвижных объектов, находя- щихся в поле зрения устройства, и является усовершенствованием изобретения по авт. св. № 1003383.
Цель изобретения - повышение точности приема сигналов от объектов при несовпадении направлений движени изображения и зарядовых пакетов в матрицах.
На фиг. 1 представлена структурна схема фотоприемника изображений; на фиг, 2 - диаграмма напряжений на выходе блоков фотоприемника.
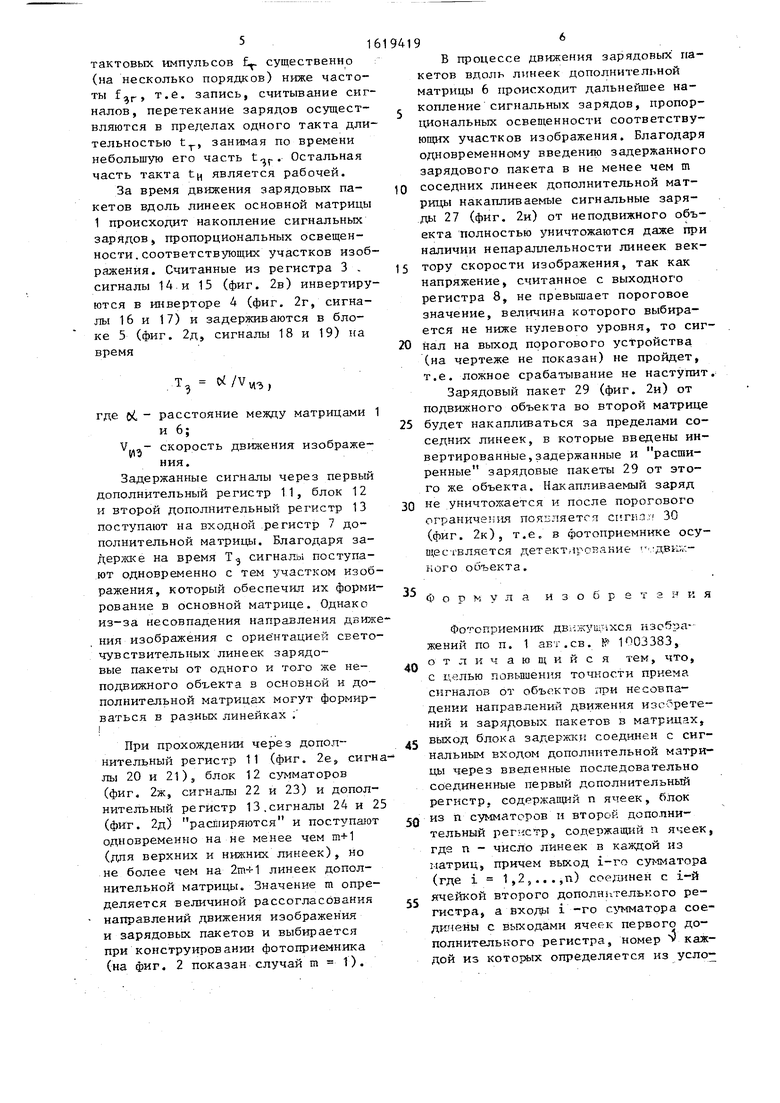
Фотоприемник движущихся изображений содержит основную матрицу 1 светочувствительных элементов с входным регистром 2 и выходным регистром 3, инвертор 4, блок 5 задержки, дополнительную матрицу 6 светочувствительных элементов с входным регистром 7 и выходным регист- ром 8, генератор 9 тактовых импульсов, датчик 10 скорости движения изображения, первый дополнительный регистр 11, содержащий п ячеек,, блок 12 из п сумматоров и второй допол- пительный регистр 13, содержащий п ячеек.
На фиг, 2 обозначено: 14 и 15 - сигналы, сформированные в основной матрице от неподвижного и подвижного объектов соответственно 16 и 17 инвертированные сигналы от неподвижного и подвижного объектов соответ- ственно; 18 и 19 - задержанные ин- вертированные сигналы от неподвижного и подвижного объектов соответственно; 20 и 21 - сигналы на выходе первого дополнительного регистра от неподвижного и подвижного объектов соответственно; 22 и 23 - расширенные сигналы на выходе блока сумматоров от подвижного и неподвижного объектов соответственно; 24 и 25 - расширенные сигналы на выходе вто- рого дополнительного регистра от подвижного и неподвижного объектов со - ответственно , 26 - часть нескомпен- скрованиого, инвертированного, задержанного и расширенного зарядово го пакета; 27 - взаимно скомпенсированные зарядовые пакеты от неподвижного объекта, сформированные в основной и дополнительной матрицах;
28 - инвертированный, задержанный и расширенный зарядовый пакет от подвижного объекта, сформированный в основной матрице1, 29 - зарядовый пакет от подвижного объекта, сформированный в дополнительной матрице- (показан случай, когда направление движения объекта перпендикулярно движению изображения), 30 - сигнал после порогового ограниченияj T - время задержки в блоке 5, t-r - длительность такта, tЗс - время записи, считывания в пределах такта; t H - время накопления зарядовых пакетов (рабочее время) в пределах такта- U ,г - сигналы на выходе задающего генератора, входящего в состав обрамляющей электроники, U(1 - сигнал после порогового ограничения. Остальные индексы соответствуют номеру блока. Для блоков 11 и 12 показаны сигналы при параллельном считывании.
Фотоприемник движущихся изображений работает следующим образом.
Контролируемое поле, содержащее подвижные и неподвижные объекты, при помощи оптической системы (не показана) проектируется на светочувствительные матрицы 1 и 6. Вследствие движения основания фотоприемника на основную матриц./ 1 и дополнительную матрицу 6 проектируется движущееся изображение. Величина скорости движения изображения предполагается неизменной.
Через входной регистр 2 во все линейки основной матрицы 1 вводится заряд, соответствующий нулевому уровню, после чего зарядовые пакеты движутся вдоль линеек, Введение зарядов г ячейки регистра 2 осуществляется последовательно с частотой задающего генератора fу (фиг. 26), Из регистра 2 в светочувствительные линейки заряды вводятся параллельно. Манипуляция напряжениямиэ обеспечивающими перетекание зарядовых пакето из элемента в элемент вдоль линейки, также производится с частотой f Скорость движения пакетов задается тактовыми импульсами Ucj (фиг. 2а) с генератора 9, управляемого сигналом датчига 10. Управление осуществляется таким образом, чтобы зарядовые пакеты двигались вдоль линеек со скоростью, равной скорости движения изображения. При зток скорость основания выбирается такой, что частота
э 1
тактовых импульсов L. существенно (на несколько порядков) ниже частоты т.е. запись, считывание сигналов, перетекание зарядов осуществляются в пределах одного такта длительностью tr, занимая по времени небольшую его часть . Остальная часть такта t является рабочей.
За время движения зарядовых пакетов вдоль линеек основной матрицы 1 происходит накопление сигнальных зарядов, пропорциональных освещенности, соответствующих участков изображения. Считанные из регистра 3 - сигналы 14 и 15 (фиг. 2в) инвертируются в инверторе 4 (фиг. 2г, сигналы 16 и 17) и задерживаются в блоке 5 (фиг. 2Д, сигналы 18 и 19) на время
Т3 /Vvi3,
где ф(. - расстояние между матрицами 1 и 6;
скорость движения изображения.
Задержанные сигналы через первый дополнительный регистр 11, блок 12 и второй дополнительный регистр 13 поступают на входной регистр 7 дополнительной матрицы. Благодаря задержке на время Т3 сигнала поступают одновременно с тем -участком изображения, который обеспечил их формирование в основной матрице. Однако из-за несовпадения направления движения изображения с ориентацией светочувствительных линеек зарядовые пакеты от одного и того же неподвижного объекта в основной и дополнительной матрицах могут формирваться в разных линейках .
I
При прохождении через дополнительный регистр 11 (фиг. 2е9 сигна лы 20 и 21)9 блок 12 сумматоров (фиг. 2ж, сигналы 22 и 23) и дополнительный регистр 13,сигналы 24 и 25 (фиг. 2д) расширяются и поступают одновременно на не менее чем т-И (для верхних и нижних линеек), но не более чем на 2т-Н линеек дополнительной матрицы. Значение m определяется величиной рассогласования направлений движения изображения и зарядовых пакетов и выбирается при конструировании фотоприемника (на фиг. 2 показан случай m 1).
96
В процессе движения зарядовых пакетов вдоль линеек дополнительной матрицы 6 происходит дальнейшее накопление сигнальных зарядов, пропорциональных освещенности соответствующих участков изображения. Благодаря одновременному введению задержанного зарядового пакета в не менее чем m
соседних линеек дополнительной матрицы накапливаемые сигнальные заряды 27 (фиг. 2и) от неподвижного объекта полностью уничтожаются даже при наличии непараллельности линеек вектору скорости изображения, так как напряжение, считанное с выходного регистра 8, не превышает пороговое значение, величина которого выбирается не ниже нулевого уровня, то сигнал на выход порогового устройства (на чертеже не показан) не пройдет, т.е. ложное срабатывание не наступит.
Зарядовый пакет 29 (фиг. 2и) от подвижного объекта во второй матрице
будет накапливаться за пределами соседних линеек, в которые введены инвертированные, задержанные и расширенные зарядовые пакеты 29 от этого же объекта. Накапливаемый заряд
не уничтожается и после порогового ограничения поясняет снгьп 30 (фиг. 2к)э т.е. в фотоприемнкке осуществляется детектлрспание кого объекта.
35
Формула и з о б р е т к я
Фо оприемник дв .лсуиг.хся изображений по п. 1 ав..св. № 1П03383,
о т л и ч а ю щ и и с я тем, что, с и шью повышения точности приема сигналов от объектов ±три несовпадении направлений движения изобретений и зарядовых пакетов в матрицах,
выход блока задержки соединен с сигнальным входом дополнительной матрицы через введенные последовательно соединенные первый дополнительный регистр, содрржащий п , блок из п сумматоров и второй допопни- тельный регистр, содержащий п ячеек, гда п - число линеек в каждой из патриц причем выход 1-го сумматора (где i 1,2,...,n) соединен с 1-й ячейкой второго дополнительного ре
гистра, а входы i -го сумматора сое- дкчены с выходами ячеек первого дополнительного регистра, номер v каждой из которых определяется из уеловий } i±j (j 0,1,2,...,m) , m определяется величиной рассогласования направлений движения изоб ражения и зарядовых пакетов, а управляющие входы первого и второго дополнительных регистров соединены с выходом генераторов тактовых импульсов .
| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоприемник движущихся изображений | 1987 |
|
SU1499528A2 |
| Фотоприемник движущихся изображений (его варианты) | 1981 |
|
SU1003383A1 |
| ФОТОПРИЕМНИК ДВИЖУЩИХСЯ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2032992C1 |
| Оптоэлектронное устройство | 1989 |
|
SU1760641A1 |
| СПОСОБ РЕКУРСИВНОЙ ФИЛЬТРАЦИИ ВИДЕОСИГНАЛА | 2016 |
|
RU2639144C1 |
| Способ получения оптических изображений объектов, наблюдаемых при больших угловых скоростях, и устройство для его реализации | 2017 |
|
RU2653087C1 |
| УСТРОЙСТВО ФОТОПРИЁМНИКА ДЛЯ ПАНОРАМНОГО ТЕЛЕВИЗИОННО-КОМПЬЮТЕРНОГО НАБЛЮДЕНИЯ | 2015 |
|
RU2592831C1 |
| УСТРОЙСТВО ПАНОРАМНОГО НАБЛЮДЕНИЯ "ДЕНЬ-НОЧЬ" И ТЕЛЕВИЗИОННАЯ КАМЕРА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2555855C1 |
| Устройство для считывания изображений | 1983 |
|
SU1104554A1 |
| Преобразователь угла отклонения светового луча в код | 1982 |
|
SU1053125A1 |

Изобретение относится к гелевл- зионным системам контропя и слежения. Цель изоЬретения - повь. енче точности приема сигналов ог объектов при несовпадении капиаьлен движения изображения и зарядовых пакетов в матрицах. Фотоприемник содержит матрицы 1 и 6 светочувствительных эл-тов с входными регистрами 2 и 7 и выходными регистрами 3 и 8, инвертор 4, блок 5 задержки, г-р 9 тактовых импульсов, датчик 10скорости движения изображения. Цель достигается введением регистров 11и 13 из п ячеек каждый и блока 12лз п сумматоров. При прохождении Т их сигналов зт,т сигналы рае- л гряются и поступают од .овременно кл е елеа GM m+1 ЧР но оопзе чем на °/п-(-1 л1Шеь,чИ ггргщы 6,- Зно. и ,ео лется величиной ра с со г. i асов с, пя напгакленпь чи/ изоРра/ления л я .рядовых и гея три киксггуироР К 1 фото приемник а. 2 ил. Рапрадлеиие движения зарядные в наг.пицох рвк&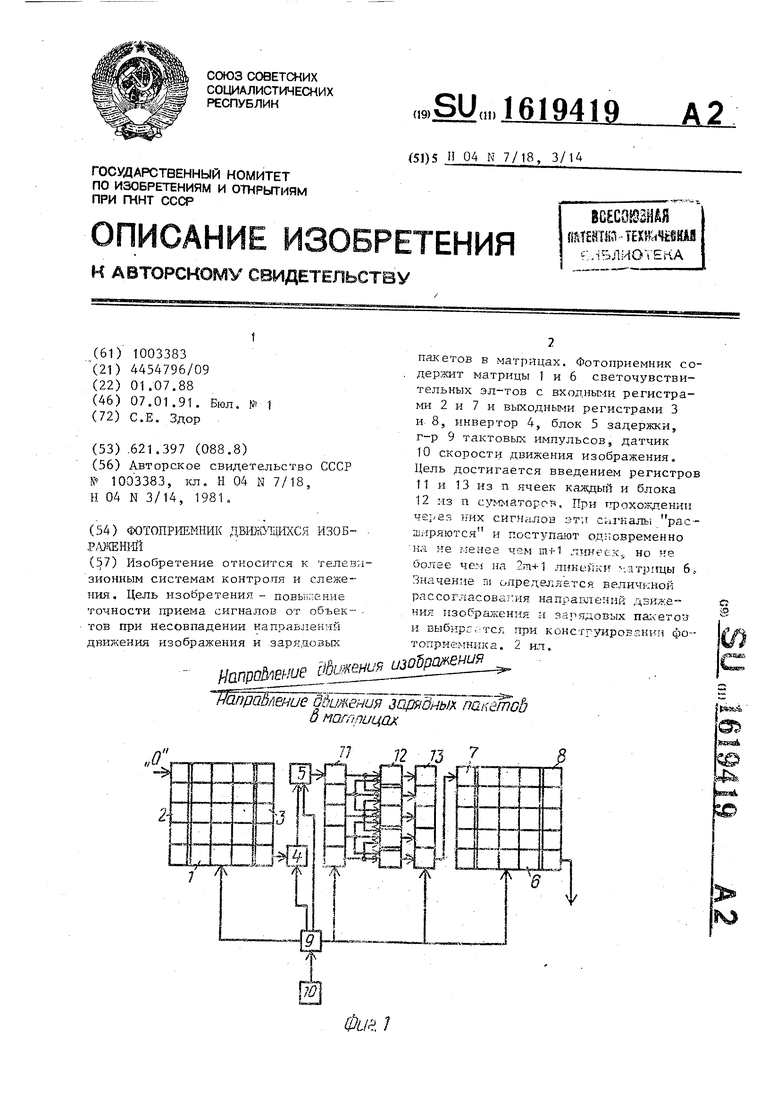
.2
W
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
