(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитотелевизионный дефектоскоп и настроечный образец для него | 1989 |
|
SU1681226A1 |
| Магнитотелевизионный дефектоскоп | 1988 |
|
SU1552087A1 |
| ТЕПЛОМЕТРИЧЕСКИЙ ДЕФЕКТОСКОП | 1992 |
|
RU2022262C1 |
| Способ контроля печатных плат и устройство для его осуществления | 1989 |
|
SU1684741A1 |
| ПРЕОБРАЗОВАТЕЛЬ МАГНИТНОГО ПОЛЯ | 1992 |
|
RU2009478C1 |
| Цветной магнитотелевизионный дефектоскоп | 1983 |
|
SU1462174A1 |
| Магнитотелевизионный дефектоскоп | 1985 |
|
SU1275283A1 |
| Магнитотелевизионный дефектоскоп | 1990 |
|
SU1739277A1 |
| Матричный преобразователь магнитных полей | 1985 |
|
SU1265566A2 |
| Преобразователь магнитного поля с тепловозбуждением | 1989 |
|
SU1670571A1 |
Изобретение относится к неразрушающему контролю и может быть использовано при визуализации дефектов изделий методами регистрации магнитных полей. Целью изобретения является повышение достоверности контроля за счет автоматизации поверки работоспособности и разрешающей способности дефектоскопа. Матричный преобразователь преобразует распределение магнитных полей образца 11 в электрический сигнал, который поступает на коммутатор 9, Одновременно блок 10 постоянной памяти генерирует электрический сигнал, имитирующий реальный сигнал от матричного преобразователя 1 Полученные сигналы отображаются на экране видеоконтрольного блока 5, и оператор по полученному изображению реально оценивает разрешающую способность устройства 2 с. п,ф-лы, 2 ил.
Изобретение относится к неразрушающему контролю и может быть использовано при визуализации дефектов изделий методами регистрации магнитных полей.
Целью изобретения является повышение достоверности контроля за счет автоматизации поверки работоспособности и разрешающей способности дефектоскопа.
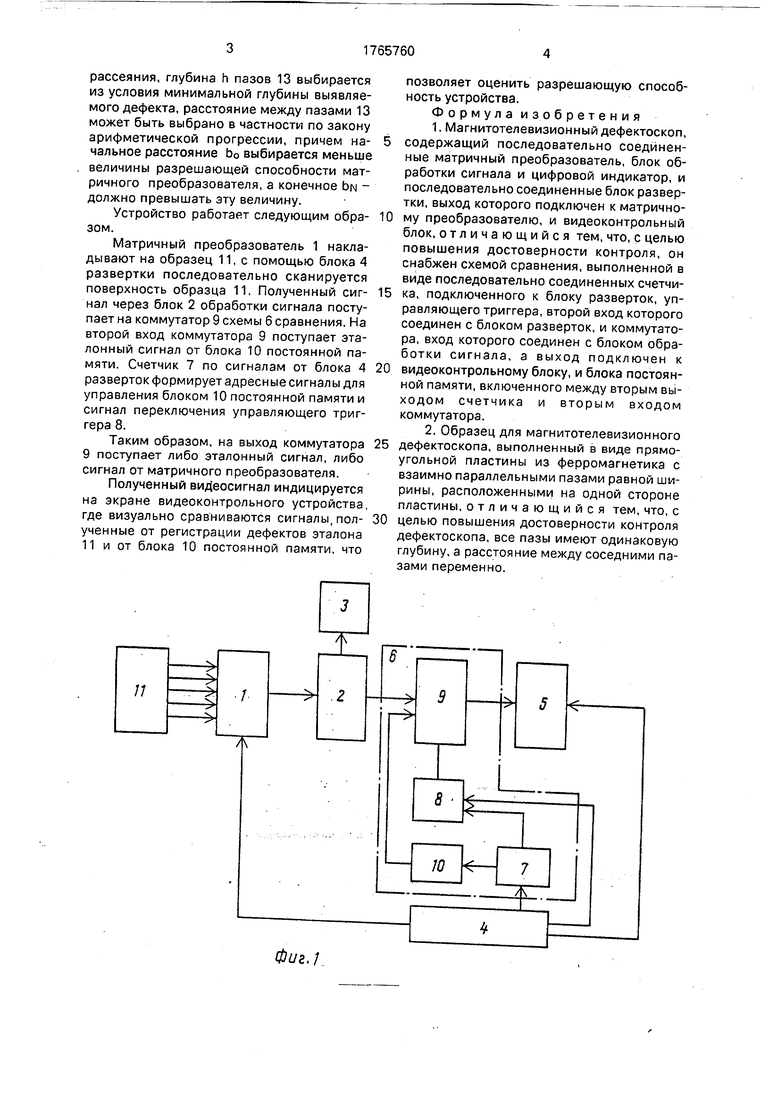
На фиг.1 приведена структурная схема дефектоскопа; на фиг.2 - конструкция образца для поверки дефектоскопа.
Устройство содержит последовательно соединенные матричный преобразователь 1, блок 2 обработки сигнала и цифровой индикаторЗ, последовательно соединенные блок 4 развертки, второй выход которого подключен к матричному преобразователю 1, и видеоконтрольный блок 5. Также в состав устройства входит схема 6 сравнения,
содержащая последовательно соединенные счетчик 7, подключенный к блоку 4 разверток, управляющий триггер 8, второй вход которого соединен с блоком 4 разверток, и коммутатор 9, включенный между выходом блока 2 обработки сигнала и входом видеоконтрольного блока 5.
Также схема 6 сравнения содержит блок 10 постоянной памяти,включенный между выходом счетчика 7 и третьим входом коммутатора 9.
На фиг.1 приведен также образец 11, расположенный вблизи матричного преобразователя 1.
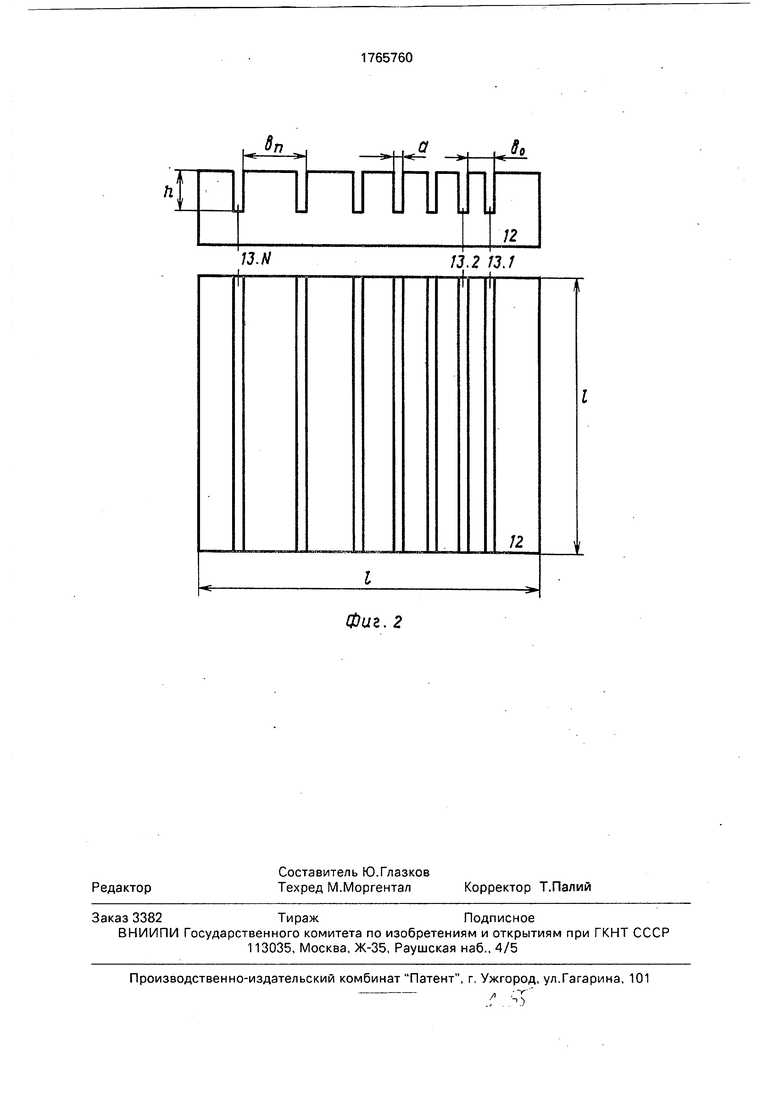
Образец 11 (фиг.2) выполнен в виде прямоугольной пластины 12 из ферромагнетика, на которой выполнены пазы 13.1 - 13.N.
Ширина а каждого паза 13 выбирается из условия получения максимального поля
VJ ON СЛ VJ
О
Ј
рассеяния, глубина h пазов 13 выбирается из условия минимальной глубины выявляемого дефекта, расстояние между пазами 13 может быть выбрано в частности по закону арифметической прогрессии, причем начальное расстояние Ь0 выбирается меньше величины разрешающей способности матричного преобразователя, а конечное DN - должно превышать эту величину.
Устройство работает следующим образом.
Матричный преобразователь 1 накладывают на образец 11, с помощью блока 4 развертки последовательно сканируется поверхность образца 11. Полученный сигнал через блок 2 обработки сигнала поступает на коммутатор 9 схемы 6 сравнения. На второй вход коммутатора 9 поступает эталонный сигнал от блока 10 постоянной памяти. Счетчик 7 по сигналам от блока 4 разверток формирует адресные сигналы для управления блоком 10 постоянной памяти и сигнал переключения управляющего триггера 8.
Таким образом, на выход коммутатора 9 поступает либо эталонный сигнал, либо сигнал от матричного преобразователя.
Полученный видеосигнал индицируется на экране видеоконтрольного устройства где визуально сравниваются сигналы,полученные от регистрации дефектов эталона 11 и от блока 10 постоянной памяти, что
-
Фиг,
позволяет оценить разрешающую способность устройства.
Формула изобретения
5 содержащий последовательно соединенные матричный преобразователь, блок обработки сигнала и цифровой индикатор, и последовательно соединенные блок развертки, выход которого подключен к матрично10 му преобразователю, и видеоконтрольный блок, отличающийся тем, что, с целью повышения достоверности контроля, он снабжен схемой сравнения, выполненной в виде последовательно соединенных счетчи15 ка, подключенного к блоку разверток, управляющего триггера, второй вход которого соединен с блоком разверток, и коммутатора, вход которого соединен с блоком обработки сигнала, а выход подключен к
20 видеоконтрольному блоку, и блока постоянной памяти, включенного между вторым выходом счетчика и вторым входом коммутатора.
25 дефектоскопа, выполненный в виде прямоугольной пластины из ферромагнетика с взаимно параллельными пазами равной ширины, расположенными на одной стороне пластины, отличающийся тем, что, с 30 целью повышения достоверности контроля дефектоскопа, все пазы имеют одинаковую глубину, а расстояние между соседними пазами переменно.
вп
а
80
| Тензорезисторный способ измерения статической магнитострикции образца | 1981 |
|
SU960688A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Магнитотелевизионный дефектоскоп и настроечный образец для него | 1989 |
|
SU1681226A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
