Изобретение относится к области конструирования радиоэлектронной аппаратуры и может быть использовано для контроля потока воздуха в системах воздушного охлаждения аппаратуры.
Известен аэродатчик 1, содержащий зонды из теплопроводного материала с установленными на них нагревателями, зонды связаны с термочувствительным элементом, выполненным в виде размещенных в корпусе биметаллических пластин с контактами.
Известен аэродатчик 2, выбранный авторами за прототип, содержащий корпус, флажок, постоянный магнит, жестко закрепленный на оси поворотный фланец, магни- тоуправляемый контакт. Внутри корпуса против полюсов магнита установлены две стойки незамкнутого магнитопровода.
Аэродатчик обладает следующими недостатками:
1. При скоростях воздушного потока близких к пороговому значению за счет автоколебаний, возникающих в системе флажок - ось - фланец, происходит самопроизвольное замыкание - размыкание контактной группы.
2. При малых вариациях скорости воздушного потока вокруг порогового значения происходят частые замыкания-размыкания контактной группы, что не позволяет получить устойчивую осредненную характеристику скорости воздушного потока.
Целью изобретения является повышение чувствительности и надежности работы аэродатчика путем исключения случайных замыканий контактной группы вблизи порога срабатывания.
Сущность предлагаемого изобретения заключается в том, что в аэродатчике, содержащем корпус с подшипником, в котором установлена ось, на одном конце которой закреплен флажок, а другой связан с постоянным магнитом, упор-ограничитель, контактную группу и Механизм возврата оси в исходное положение, дополнительно содержит второй постоянный магнит, контактная группа выполнена в виде двух пластин, установленных во взаимоперпендикулярных плоскостях, причем первая из пластин закреплена на корпусе в плоскости, перпендикулярной плоскости вращения флажка, а вторая - на его оси, при этом на свободном конце ее закреплен первый постоянный
VI ON Vj
ь.
44
магнит, второй постоянный магнит закреплен на первой пластине, причем магниты обращены друг к другу одноименными полюсами и находятся на одинаковом расстоянии от оси вращения флажка, а механизм возврата выполнен в виде спиральной пружины.
На фиг. 1 изображен предлагаемый аэродатчик; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - 5 - графики, поясняющие работу аэродатчика. . - ,
Устройство содержит корпус 1 с подшипником 2 и установленной в нем осью 3 с флажком 4, механизм возврата 5, пластину 6, закрепленную одним концом на оси 3, при этом на свободном конце ее закреплен постоянный магнит 9, обращенный одним из своих полюсов к одноименному полюсу второго магнита 10 установленного на пластине закрепленной на корпусе 1.
Аэродатчик работает следующим образом.
На ось аэродатчика 3 действует следующая система моментов. Момент Мвз от взаимодействия магнитов 9, 10, момент Мупр - от действия возвратной пружины 5, момент Мс - от действия воздушного потока нафла- жок аэродатчика 4.
При отсутствии действия момента Мс (скорость воздушного потока равна нулю) угол поворота оси аэродатчика 3 а «max. Другое крайнее положение оси аэродатчика 3 « «min соответствует максимальной скорости воздушного потока действующей на флажок 4. При углах «min а «max между моментами выполняется равенство:
Мвз + Мупр Мс
(1)
т.е. угол поворота оси аэродатчика 3 всегда таков, что должно быть выполнено равенство (1). Все указанные моменты являются функциями от угла поворота а оси аэродатчика 3.
На фиг. 3 представлено два положения подвижного магнита 9, при a- «ср, где Оср - угол срабатывания (угол при котором происходит замыкание контактной пружины) и при произвольном значении угла а. Момент Мвз определяется следующим соотношени- ем:
e -sln/J-slng-S)
Мвз , . (2)
(s2 + 4r2sin2#)3/2
где е- некоторая постоянная зависящая от величины заряда магнитов от абсолютной диэлектрической проницаемости среды,
г - радиус окружности определяющей траекторию движения подвижного момента 9,
ft - угол связанный с углами а, ОСР соотношением
ft а - «ср
(3)
0
5 0
5
0 5
0
5 0
5
Проанализируем соотношение (2). Величина S - мала по сравнению с г. Однако, нельзя положить 5 0 при малых значениях угла ft, т.к. при этом lim Мвз °°. При SЈ О строго говоря, если Mm Мвз 0 положение подвижного магнита 9 соответствующее/ 0() яеляется неустойчивым по Ляпунову, т.е. малые отклонения угла/ от нулевого значения приводят к конечному приращению момента Мвз. В реальной конструкции следует вместо неустойчивой точки (ft 0) говорить об некоторой области неустойчивости - Д ft ft0. За угол fto пределяющий границы области неустойчивости, можно принять величину: sin ft0
n
яг. Действительно, можно считать, что MB3-v -г-а npw ft-fto величина Мвз
является конечной величиной. При ft fto угол fto является малым, так например, если S 0,5 мм, г 20 мм, тогда ft0 0,012 рад (/ 0,8°). Изменение величины S изменяет границы области неустойчивости и величины Мвз на границе области неустойчивости.
Качественная графическая зависимость Мвз от угла a(a ft + ОСР) представлена на фиг. 4. Момент Мупр - определяется упругостью возвратной пружины 5:
Мупр С( «max - О) + М0,
где М0 - величина момента начального под- жатия пружины,
С - жесткость пружины.
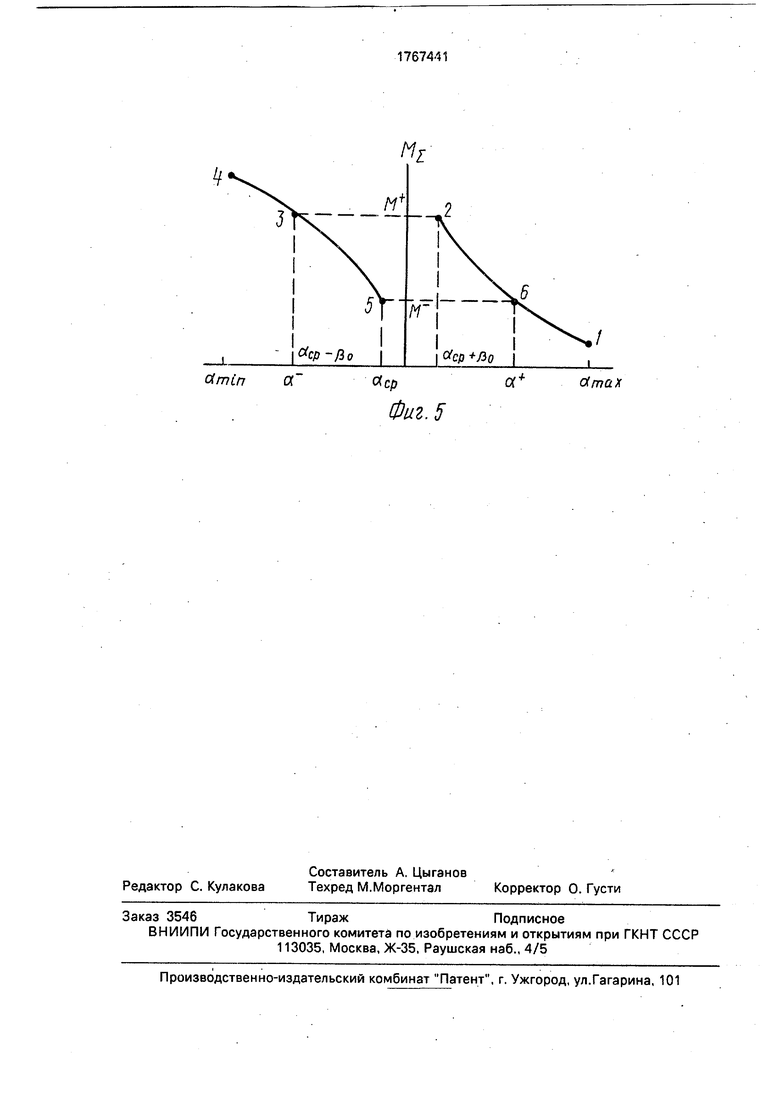
В аэродатчике рассмотренные моменты действуют параллельно. На основании этого можно получить суммарный момент М Мвз + Мупр, Суммарная характеристика представлена на фиг. 5. Работа аэродатчика происходит следующим образом. При отсутствии воздушного потока суммарный момент М определяется по точке 1. При появлении воздушного потока происходит изменение величины закону 1-2 фиг. 5. При этом выполнено соотношение (1), но закон изменения такой же как и для М(по части кривой 1-2).
При воздействии воздушного потока Мс М+ малые вариации угла « (за счет автоколебаний в системе, вариаций скорости воздушного потока и прочих случайных
факторов) не вызывает замыканий-размыканий контактной группы 7, т.к. при этом угол а не проходит через угол Оср угол срабатывания контактной группы 7. Если величина воздушного потока такова, что Мс М , то за счет области неустойчивости в диапазоне Оср-/3о«2 аср+/ иза счет выполнения в любой момент соотношения (1) происходит скачок угла а до значения а- соответствующего точке 3 фиг. 5. При этом произойдет замыкание или размыкание контактной группы 7, т.к. ось аэродатчика 3 пройдет величину угла срабатывания аэродатчика «ср. При воздействии воздушного потока McsM+ малые вариации угла а около величины а (за счет автоколебаний в системе вариаций скорости воздушнбго потока и прочих случайных факторов) не вызывают замыкание-размыкание контактной группы, т.к. при этом угол а не проходит через угол Оср.
Аналогично происходит работа аэродатчика при уменьшении скорости воздушного потока соответствующие точкам 4-3-5-6-1 по фиг. 5.
Повышение чувствительности и надежности работы аэродатчика достигается путем исключения случайных замыканий
0
5
0
5
контактной группы вблизи порога срабатывания.
Формула изобретения Аэродатчик, содержащий корпус с подшипником, в котором установлена ось. на одном конце которой закреплен флажок, а другой связан с постоянным магнитом, упор-ограничитель, контакгную группу и механизм возврата оси в исходное положение, отличающийся тем, что, с целью повышения чувствительности и надежности работы аэродатчика путем исключения случайных замыканий контактной группы вблизи порога срабатывания, он дополнительно содержит второй постоянный магнит, контактная группа выполнена в виде двух пластин, установленных во взаимно перпендикулярных плоскостях, причем первая из пластин закреплена на корпусе в плоскости, перпендикулярной плоскости вращения флажка, а вторая - на его оси, при этом на свободном конце ее закреплен первый постоянный магнит, второй постоянный магнит закреплен на первой пластине, причем магниты обращены друг к другу одноименными полюсами и находятся на одинаковом расстоянии от оси вращения флажка, а механизм возврата выполнен в виде спиральной пружины.
4
Фиг.


| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК КОНТРОЛЯ ПОТОКА (ВАРИАНТЫ) | 2010 |
|
RU2461009C2 |
| Реле потока воздуха | 1990 |
|
SU1767442A1 |
| УКАЗАТЕЛЬ КОРОТКИХ ЗАМЫКАНИЙ | 1973 |
|
SU404152A1 |
| Устройство для определения направления поиска короткого замыкания | 1986 |
|
SU1396098A1 |
| Указатель опоры с поврежденной изоляцией | 1983 |
|
SU1190313A1 |
| Запоминающее устройство для контрольно-сортировочных автоматов | 1973 |
|
SU488260A1 |
| ЦИКЛОИДНЫЙ ВЕТРОДВИГАТЕЛЬ | 2012 |
|
RU2518727C2 |
| РЕЛЕ ДАВЛЕНИЯ | 2000 |
|
RU2169913C1 |
| Индикатор | 1985 |
|
SU1336090A1 |
| Высоковольтный вакуумный выключатель | 1978 |
|
SU748553A1 |

Использование: в радиоэлектронной аппаратуре, для контроля потока воздуха в системах воздушного охлаждения аппаратуры. Сущность изобретения: устройство содержит корпус с подшипником, установленные на нем ось с флажком, механизм возврата, два постоянных магнита, контактную группу из двух пластин. 5 ил.
Подвижный.
магнит при.
значении
угла а
Неподдижныи. магнит
Wfy&NfmaJ
ofmm
Фиг.2
Ось аэродатчики
Окружность, по но/порой происходит
движение подвижного
. Подвижный магнита, магнит при
Фиг.З
of
flfcpC(mQX
Мвз/а с(гп т
Фиг. %
otmCrr
a
2
&c( +Ло
cp
Фиг. 5
a+
01 max
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сигнализатор потока | 1976 |
|
SU580510A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аэродатчик | 1973 |
|
SU536435A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
