1
Изобретение относится « области электромеханических блоков Памяти, а именно к конструкциям запоминающих устройств для контрольно-сортировочных роторных автоматов с непрерывным вращением ротора.
Известно запоминающее устройство для контрольно-сортировочных автоматов, содержащее цилиндр с элементами памяти по числу сортировочных групп на каждой позиции, кинематически связанный с цилиндром ротор с сопловыми окнами, электромагниты управления элементами памяти, фиксатор элементов памяти и узлы возврата элементов памяти в исходное положение.
Известное запоминающее устройство не обеспечивает сортировку деталей заданных тилоразмеров на три группы с требуемым быстродействием и надежностью при непрерывном вращении ротора. Форма и размеры элементов памяти и электромагнитов управления известного устройства не позволяют запоминать сигналы контрольной головки в любой точке зоны контроля и открывать электромагнитные клапаны пневматической сортировочной системы на заданное время на соответствующей сигналу сортировочной позиции.
Целью настоящего изобретения является увеличение быстродействия и повыщение надежности работы запоминающего устройства.
Для достижения этой цели в известном запоминающем устройстве каждый элемент памяти выполнен в виде неподвижно соединенных плоской немагнитной пластины, якоря электромагнита управления, направляющего щтока с канавками для фиксатора и щайбы, через щтифт соединенной с цилиндром, причем торцовые поверхности якоря и полюсных наконечников сердечников электромагнитов выполнены по концентрическим дугам, длина
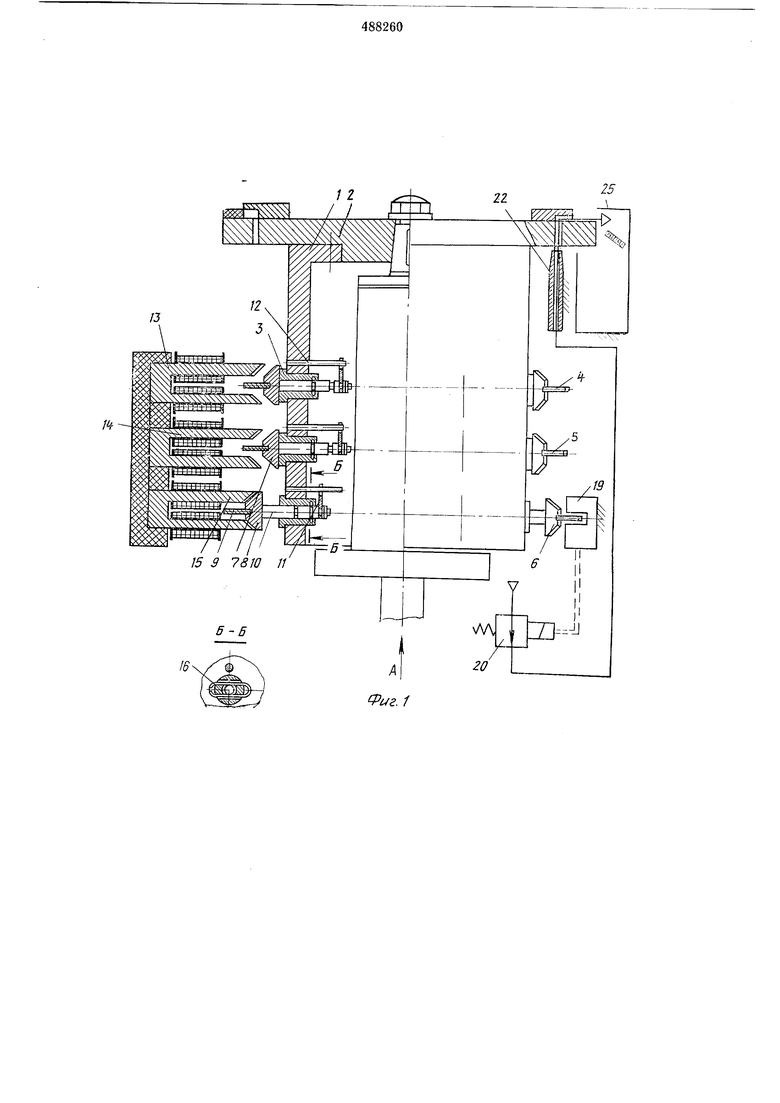
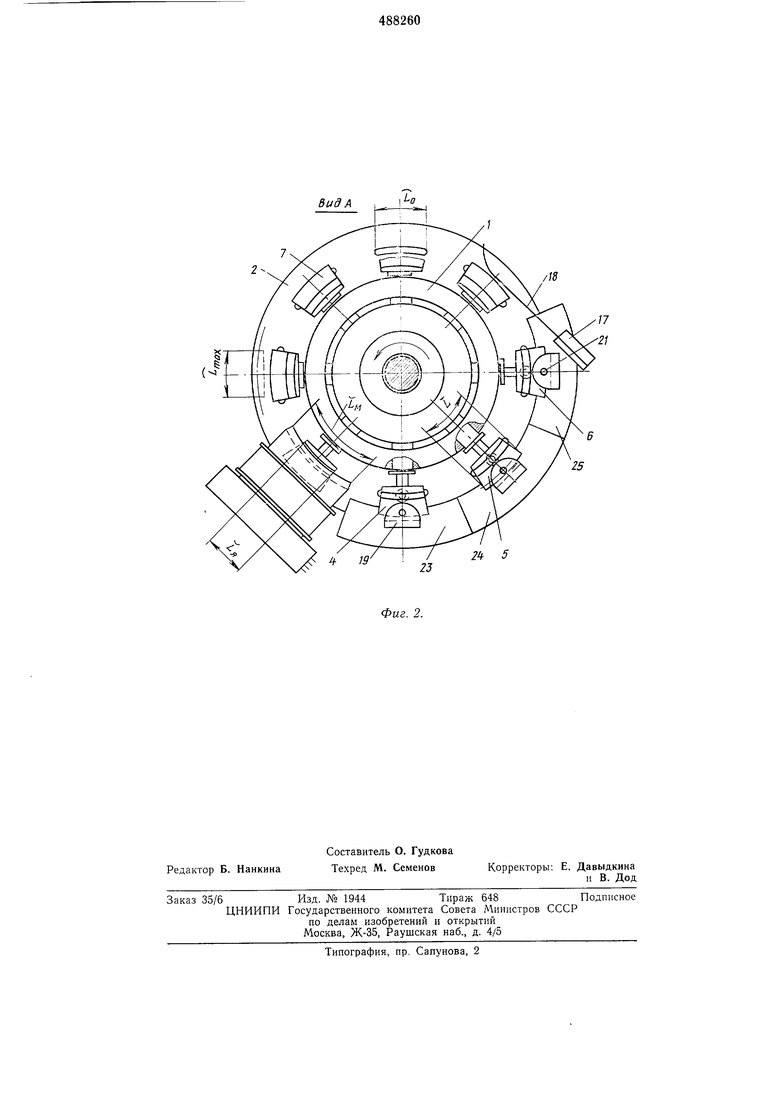
которых пропорциональна максимальной величине контролируемого параметра детали, а длина плоской немагнитной пластины пропорциональна длине соплового окна ротора. На фиг. 1 схематически изображено предлагаемое запоминающее устройство для контрольно-сортировочных автоматов; на фиг. 2 - вид по стрелке А на фиг. 1.
Запоминающее устройство содержит цилиндр 1, ротор 2 с сопловыми окнами, кинематически связанный с цилиндром, на каждой позиции которого в направляющих втулках 3 расположено по три элемента памяти 4, 5, 6. Количество элементов памяти на каждой позиции цилиндра 1 равно числу сортировочных
групп. Элементы памяти 4, 5, 6 выполнены в виде флажка 7, состоящего из неподвижно соединенных якоря 8, плоской немагнитной пластины 9, направляющего щтока 10 с канавками для фиксатора и щайбы 11 с пазом,
через щтифт 12 соединенной с цилиндром 1.
Шайба 11 с помощью штифта 12 препятствует развороту флажка 7 вокруг собственной оси.
Электромагниты управления 13, 14, 15 предназначены для выдвижения элементов памяти 4, 5, 6 по сигналам контрольной головки автомата (контрольная головка на фиг. 1, 2 условно не показана). С целью увеличения усилия электромагнитов управления 13, 14, 15 при сохранении потребляемой мощности торцовые поверхности полюсных наконечников сердечников и якоря 8 выполнены по концентрическим дугам под углом в 45°. При выбранной форме торцовых поверхностей значительно возрастает магнитная проводимость воздушного зазора. С целью исключения притягивания флажка 7 преимущественно к одному из полюсных наконечников сердечника электромагнита пластина 9 выполнена из немагнитного материала, например бронзы, меди, латуни или алюминия.
Фиксатор элементов памяти в одном из двух устойчивых положений выполнен в виде О-образной незамкнутой пружинной защелки 16, установленной в направляющей втулке 3 цилиндра 1 и западающей в канавки для фиксатора щтока 10.
Узел возврата 17 (см. фиг. 2) элементов памяти в исходное положение выполнен в виде консольно закрепленных -плоских пружин 18, установленных по касательной к траектории, описываемой торцовой поверхностью немагнитной пластины 9 флажка 7 в исходном положении, количество пружин равно числу групп сортировки. Указанное исполнение обеспечивает плавный без перекоса в направляющих втулках 3 возврат флажков 7 в исходное положение, допускает значительные отклонения в размерах (по радиусу и длине) пластин 9, полностью исключая возможность поломки элементов памяти, что имеет место при жестком клине. Концы пружин 18 выполнены по радиусу, что исключает возможпость поло.мки их при реверсе ротора, что может иметь место прн настройке автомата и вращении ротора вручную. С целью увеличения срока службы пружины 18 установлены в количестве, равном числу групп сортировки, т. е. каждая пружина возвращает в исходное положение лишь флажки одной группы сортировки (при установке одной пружины ресурс последней сокращается в три раза при трех группах сортировки).
В связи с большим количеством типоразмеров сортируемых деталей зона контроля автомата переменна. С целью повышения быстродействия и надежности запоминающего устройства длина по дуге полюсных наконечников сердеч1-шков электромагнитов управления 13, 14, 15 выбрана пропорциональной максимальной величине контролируемого параметра детали, а сами электромагниты установлены со смещением по ходу ротора на угол запаздывания относительно начала зоны контроля. Угол запаздывания определяется временем запаздывания схемы (контрольная
головка - электромагнит управления) и скоростью вращения ротора.
Длина по дуге LM полюсных наконечников сердечников электромагнитов управления определяется по формуле
Дм
м -
Дк
максимальная величина контролируемого параметра детали по
дуге окружности с диаметром Лм;
диаметр дуги полюсных «аконечников сердечников электромагнитов управления;
диаметр контрольной окружности.
Длина по дуге Ь якоря электромагнитов управления определяется но формуле
я - rnaz
где К - коэффициент пропорциональности, определяемый скоростью вращения ротора (определяется опытным путем).
Бесконтактный датчик 19 предназначен для коммутации электрических цепей управления
электромагнитных клапанов 20. Срабатывание датчика 19 производится введением в щель головки пластины 9. При введении и щель между катушками базовой и коллекторной обмоток пластины 9 происходит уменьшение коэффициента обратной связи, вызывающей срыв генерации. Нормально закрытый выходной транзистор открывается, что вызывает срабатывание реле, включенного в цепь коллектора указанного транзистора.
Срабатывание реле вызывает замыкание цепи питания электромагнитных клапанов 20. Применение бесконтактных датчиков 19 .в качестве преобразователя информации в управляющий исполнительными органами сигнал
обеспечивает высокое быстродействие и надежность сортировки при ресурсе, значительно превышающем ресурс контактных датчиков, например микровыключателя.
Количество бесконтактных датчиков 19 и
клапанов 20 равно числу групп сортировки, и расположены они по одному на каждой сортировочной позиции (на фиг. I условно показан один клапан). Продолжительность открытия клапанов 20 определяется длиной пластины 9 по дуге окружности, проходящей через ось ферритовых стержней 21 датчика 19; в свою очередь, продолжительность открытия клапанов 20 равна времени пребывания подводящего сопла 22 в зоне соплового окна ротора 2. Таким образом, длина пластины 9 пропорциональна длине соплового окна ротора 2 и определяется по формуле
д
Z. - LO
До
где L - длина пластины по дуге на диаметре Д;
LO - длина соплового окна ротора по дуге на диаметре До;
До-диаметр окружности, проходящей через оси подводящих сопел 22;
Д - диаметр окружности, проходящей по оси ферритовых стержней датчиков 19.
Сортировочные бункеры 23, 24, 25 предназначены для приема и на.копления деталей соответствующих сортировочных групп.
Устройство работает следующим образом.
На загрузочной позиции на непрерывно вращающийся ротор 2 уклады вается контролируемая деталь, которая транспортируется затем на контрольную позицию. В результате контроля сигнал контрольной головки вызывает замыкание цепи питания одного из электромагнитов управления 13, 14, 15. Соответствующий , сигналу флажок 7 выдвигается и фиксируется с помощью защелки 16, западающей в канавку для фиксатора щтока 10. Пластина флажка 7 на соответствующей сортировочной позиции входит в щель датчика 19, что вызывает открытие клапана 20. Сжатый воздух через открытый клапан 20, подводящее сопло 22 поступает к сопловому окну ротора 2 и сбрасывает деталь в соответствующий сортировочный бункер (23, 24, 25). При дальнейшем вращении ротора выдвинутый флажок 7 набегает на пружину 18, которая
возвращает его в исходное полол ение, в котором он фиксируется защелкой 16.
На освобожденное место на загрузочной позиции укладывается очередная деталь. Загрузка ротора деталями осуп1,ествляется через каждые 45° поворота.
Формула изобретения
Запоминающее устройство для контрольносортировочных автоматов, содержащее цилиндр с элементами памяти по числу сортировочных групп на каждой позиции, кинематически связанный с цилиндром ротор с сопловыми окнами, электромагниты управления элементами памяти, фиксатор элементов памяти и узлы возврата элементов памяти в исходное положение, отличающееся тем, что, с целью увеличения быстродействия устройства и повышения надежности его работы, каждый элемент памяти выполнен в виде неподвижно соединенных плоской немагнитной пластины, якоря электромагнита управления, направляющего щтока с канавками для фиксатора и щайбы, через щтифт соединенной с цилиндром, причем торцовые поверхности якоря и полюсных наконечников сердечников электромагнитов выполнены по концентрическим дугам, длина которых пропорциональна
максимальной величине контролируемого параметра детали, а длина плоской немагнитной пластины пропорциональна длине соплового окна ротора.
Вид А
25
2f 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сортировки электродов по толщине | 1976 |
|
SU603438A1 |
| Автомат для сортировки электродов по толщине | 1977 |
|
SU665956A1 |
| Контрольно-сортировочное устройство | 1979 |
|
SU848099A1 |
| МНОГОКАНАЛЬНОЕ ЭЛЕКТРОМЕХАНИЧЕСКОЕ ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО | 1970 |
|
SU282481A1 |
| Автомат для сортировки плоских деталей по толщине | 1975 |
|
SU573208A1 |
| ПОЛУАВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ УПРУГИХ ПЛАСТИН по ТОЛЩИНЕ | 1973 |
|
SU363530A1 |
| Гибкий ротор с постоянными магнитами | 2017 |
|
RU2659796C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗОМ ГРУЗОВОГО ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2011 |
|
RU2476340C1 |
| Автомат с электроконтактными датчиками для контроля линейных величин деталей, например клапанов двигателей внутреннего сгорания | 1961 |
|
SU148247A1 |
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ АВТОМАТ | 2006 |
|
RU2317156C2 |
Фиг. 2.
