сл
С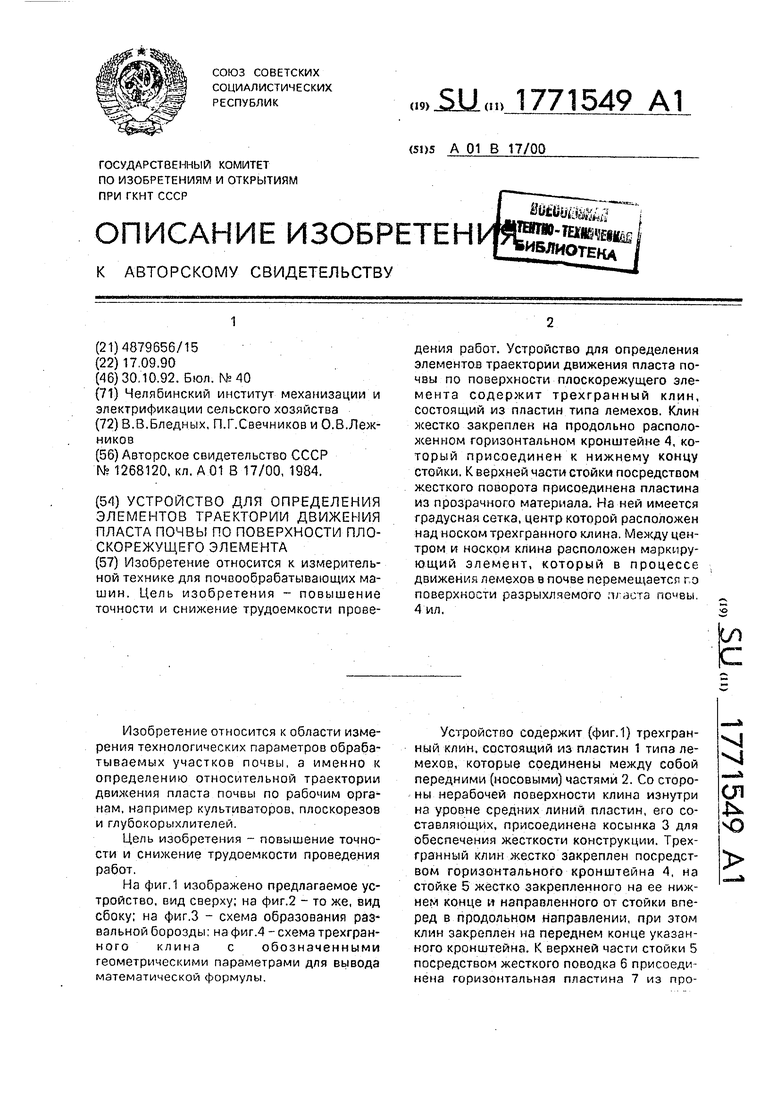
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения элементов траектории движения пласта почвы по поверхности плоскорежущего элемента и устройство для его осуществления | 1991 |
|
SU1813316A1 |
| Рабочий орган культиватора | 1990 |
|
SU1722264A1 |
| РАБОЧИЙ ОРГАН ДЛЯ БЕЗОТВАЛЬНОЙ ОБРАБОТКИ ПОЧВЫ | 1993 |
|
RU2050760C1 |
| Рабочий орган культиватора | 1990 |
|
SU1768012A3 |
| Мелиоративный плуг | 2018 |
|
RU2681284C1 |
| РАБОЧИЙ ОРГАН ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ | 2008 |
|
RU2375861C1 |
| Почвообрабатывающий рабочий орган | 1990 |
|
SU1782368A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОЙ ТРАЕКТОРИИ ДВИЖЕНИЯ МАТЕРИАЛА ПО ТРЕХГРАННОМУ КЛИНУ ПОЧВООБРАБАТЫВАЮЩЕГО РАБОЧЕГО ОРГАНА | 2001 |
|
RU2195796C2 |
| Почвообрабатывающее орудие | 1990 |
|
SU1727581A1 |
| СОШНИК ДЛЯ БОРОЗДКОВОГО ПОСЕВА | 2017 |
|
RU2649330C1 |
Изобретение относится к измерительной технике для почвообрабатывающих машин. Цель изобретения - повышение точности и снижение трудоемкости проведения работ. Устройство для определения элементов траектории движения пласта почвы по поверхности плоскорежущего элемента содержит трехгранный клин, состоящий из пластин типа лемехов. Клин жестко закреплен на продольно расположенном горизонтальном кронштейне 4, который присоединен к нижнему концу стойки, К верхней части стойки посредством жесткого поворота присоединена пластина из прозрачного материала. На ней имеется градусная сетка, центр которой расположен над носком трехгранного клина. Между центром и носком клина расположен маркирующий элемент, который в процессе движения лемехов в почве перемещается г о поверхности разрыхляемого поиеы. 4 ил.
Изобретение относится к области измерения технологических параметров обрабатываемых участков почвы, а именно к определению относительной траектории движения пласта почвы по рабочим органам, например культиваторов, плоскорезов и глубокорыхлителей.
Цель изобретения - повышение точности и снижение трудоемкости проведения работ.
На фиг.1 изображено предлагаемое устройство, вид сверху; на фиг.2 - то же, вид сбоку; на фиг.З - схема образования раз вальной борозды: на фиг.4 - схема трехгран- ного клина с обозначенными геометрическими параметрами для вывода математической формулы.
Устройство содержит (фиг.1) трехгранный клин, состоящий из пластин 1 типа лемехов, которые соединены между собой передними (носовыми) частями 2. Со стороны нерабочей поверхности клина изнутри на уровне средних линий пластин, его составляющих, присоединена косынка 3 для обеспечения жесткости конструкции. Трехгранный клин жестко закреплен посредством горизонтального кронштейна 4, на стойке 5 жестко закрепленного на ее нижнем конце и направленного от стойки вперед в продольном направлении, при этом клин закреплен на переднем конце указанного кронштейна. К верхней части стойки 5 посредством жесткого поводка 6 присоединена горизонтальная пластина 7 из -Ч
СП
Ј О
зрачного материала, имеющая градусную сетку 8, причем центр ее расположен под носком трехгранного клина. Точечный маркирующий элемент, например, из войлока, (на фигуре не обозначено) установлен у носка клина с возможностью свободного перемещения между рабочей поверхностью клина и пластиной 6.
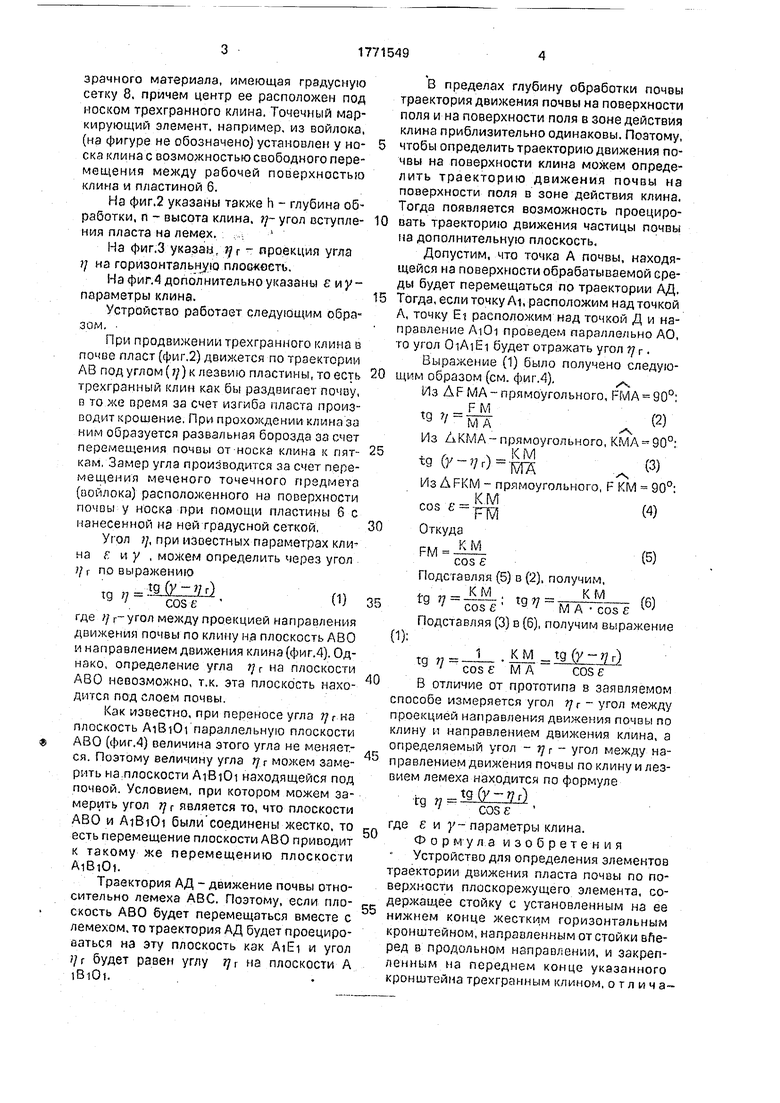
На фиг.2 указаны также h - глубина обработки, п - высота клина, ц- угол вступления пласта на лемех.
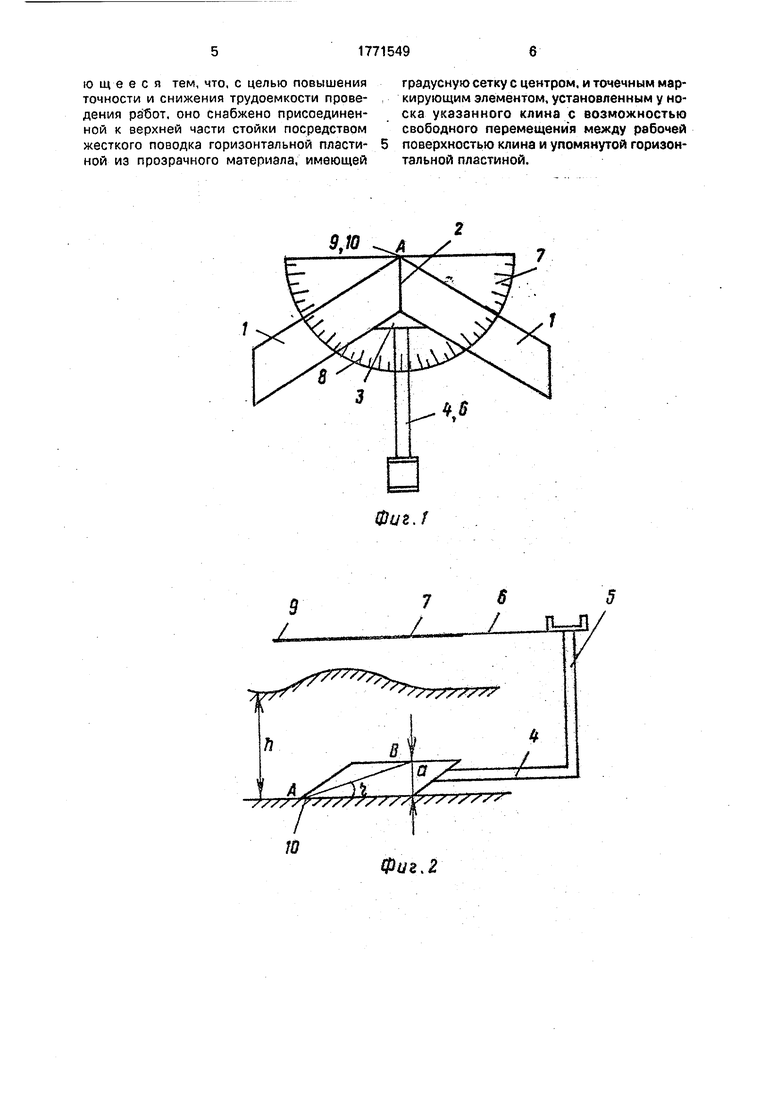
На фиг.З указан, ц - проекция угла / на горизонтальную плос-кеетъ.
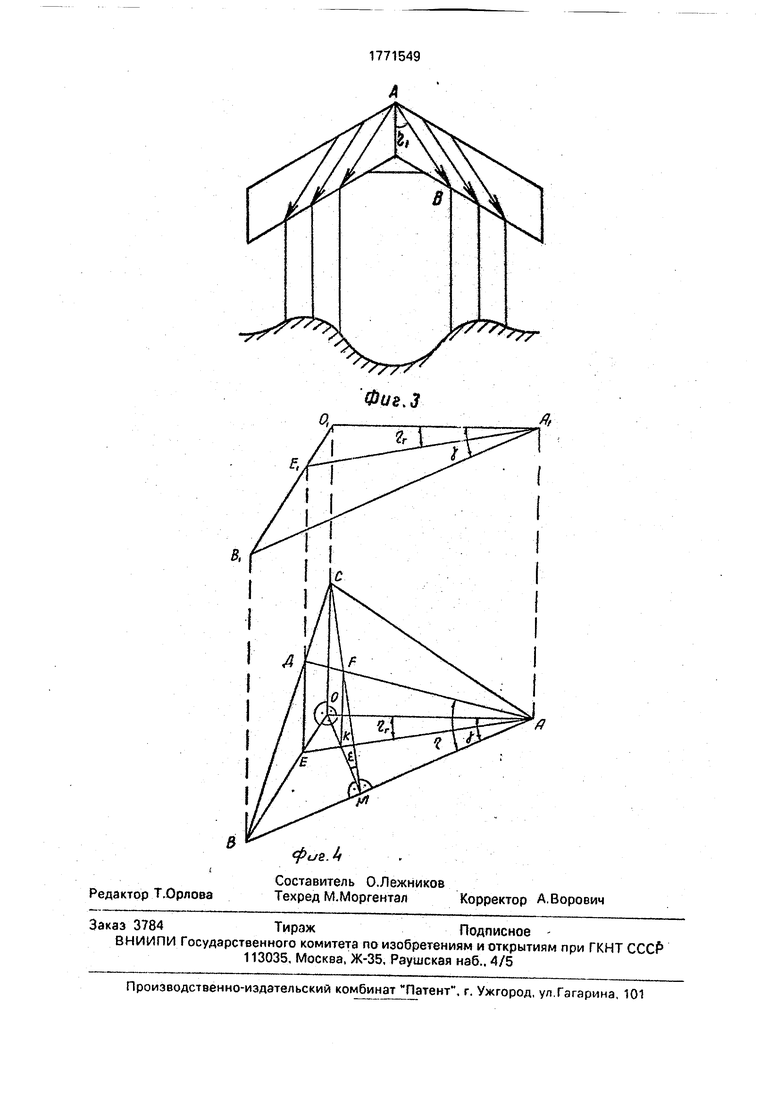
На фиг.4 дополнительно указаны с лу параметры клина.
Устройство работает следующим образом.
При продвижении трехгранного клина в почве пласт (фиг.2) движется по траектории АВ под углом (/) к лезвию пластины, то есть трехгранный клин как бы раздвигает почоу, в 70 же время за счет изгиба пласта производит крошение. При прохождении клина за ним образуется развальная борозда аз смет перемещения почвы от носка клина к пяткам, Замер угла производшся за счет перемещения меченого точечного предмета (войлока) расположенного на поверхности почвы у носка при помощи пластины б с нанесенной не ней градусной сеткой,
Угол ;/, при известных параметрах клина г и у , можем определить через угол j/r по выражению
.о)
где г-угол между проекцией направления движения почвы по клину на плоскость АВО и направлением движения клина (фиг.4). Однако, определение угла г на плоскости АВО невозможно, т.к. эта плоскость находи гсл под слоем почвы.
Как известно, при переносе угла rj г на плоскость AiBiOi параллельную плоскости АВО (фиг.4) величина этого угла не меняется. Поэтому величину угла г/г можем замерить на плоскости AiBiOi находящейся под почвой. Условием, при котором можем замерить угол ц г является то, что плоскости АВО и AiBiOi были соединены жестко, то ость перемещение плоскости АВО приводит к такому же перемещению плоскости AiBiOi.
Траектория АД - движение почвы относительно лемеха ABC, Поэтому, если плоскость АВО будет перемещаться вместе с лемехом, то траектория АД будет проецироваться на эту плоскость как AiEi и угол /г будет равен углу 77 r на плоскости А iBiOi.
0
5
0
В пределах глубину обработки почвы траектория движения почвы на поверхности поля и на поверхности поля в зоне действия клина приблизительно одинаковы. Поэтому, чтобы определить траекторию движения почвы на поверхности клина можем определить траекторию движения почвы на поверхности поля в зоне действия клина, Тогда появляется возможность проецировать траекторию движения частицы почвы на дополнительную плоскость,
Допустим, что точка А почвы, находящейся на поверхности обрабатываемой среды будет перемещаться по траектории АД. Тогда, если точку AL расположим над точкой А, точку Et расположим над точкой Д и направление AiOi проведем параллельно АО, го уюл OiAiEi будет отражать угол т/г.
Выражение (1) было получено следующим образом (см. фиг.4),
Из АРМА-прямоугольного, FMA 90°:
-ЈЈи
5
0
5
0
5
0
5
М А
хЧ
Из ДША-прямоугольного, КМА -90°:
)-Ј#| (3)
Из A FKM - прямоугольного, F КМ 90°: cos е (4)
Откуда
™-in®
Подставляя (5) в (2), получим, КМ . КМ
tg
(6)
О):
cos е MA- cos с
Подставляя (3) в (6), получим выражение
J- . К М „ tg (у - ff г)
tg COS Е М ACOS E
В отличие от прототипа в заявляемом способе измеряется угол /r угол между проекцией направления движения почвы по клину и направлением движения клина, а определяемый угол - г г угол между направлением движения почвы по клину и лезвием лемеха находится по формуле
CQ tgCx-V)
С9 cose где Ј и у- параметры клина.
Формула изобретения Устройство для определения элементов траектории движения пласта почвы по поверхности плоскорежущего элемента, содержащее стойку с установленным на ее нижнем конце жестким горизонтальным кронштейном, направленным от стойки вперед в продольном направлении, и закрепленным на переднем конце указанного кронштейна трехгранным клином, о т л и ч аю щ е е с я тем, что, с целью повышения точности и снижения трудоемкости проведения работ, оно снабжено присоединенной к верхней части стойки посредством жесткого поводка горизонтальной пластиной из прозрачного материала, имеющей
W А /
градусную сетку с центром, и точечным маркирующим элементом, установленным у носка указанного клина с возможностью свободного перемещения между рабочей поверхностью клина и упомянутой горизонтальной пластиной.
фцг.1
Фиъ.2
х
в,
в
фа&. 4
Составитель О.Лежников Техред М.Моргентал
угтъътФиё.З
Корректор А.Ворович
| Способ определения относительной траектории движения пласта почвы по плоскорежущему рабочему органу | 1984 |
|
SU1268120A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
