Изобретение относится к области измерения технологических параметров обрабатываемых участков почвы, а именно к определению относительной траектории движения пласта почвы по рабочим органам, например культиваторов, плоскорезов и глубокорыхлителей.
Преимущественно изобретение может быть использовано для определения относительной траектории движения почвы по плоскорежущему рабочему органу, то есть для определения угла вступления пласта почвы (rj на плоскорежущий рабочий орган.
Целью изобретения является повышение точности определения угла движения пласта почвы по рабочей поверхности клина.
Поставленная цель достигаете я предлагаемым способом, который как и прототип
включает заглубление, закрепленного на стойке трехгранного клина в почву на глубину а h За, где h - глубина обработки; а - высота клина, и его перемещение в почве при расположении стойки за трехгранным клином и получение развальной борозды, но в отличие от него на поверхности почвы располагают меченый элемент под носком клина, отмечают конечное положение меченого элемента после передвижения клина на расстояние
00
GO
Сл ON
L cos Ј
В
-Ј$- +
Lcos Ј sin у
где К- расстояние, на которое предполагают клин;
L - ширина трехгранного клина;
В - рабочая ширина захвата трехгранного клина;
Ј, у- параметры клина, и измеряют угол движения почвы между лезвием трехгранного клина и прямой, соединяющей начальное и конечное положения меченого элемента. Устройство для осуществления способа содержит как и прототип измерительное устройство, но в отличие от него измерительное устройство выполнено в виде измерительной пластины, прикрепленной к стойке посредством фиксированной шаровой головки с возможностью изменения положения пластины в вертикальной и горизонтальной плоскостях и имеющей на продольной оси симметрии два сквозных отверстия между которыми выполнен вырез в виде градуированной шкалы, при этом в отверстие вставлены остроконечные стержни, один из которых закреплен жестко, второй соединяет измерительную пластину с маятниковой пластиной с возможностью вращения последней относительно оси, совпадающей с осью остроконечного стержня, при этом на противоположном конце маятниковой пластины жестко закреплен остро-. конечный стержень, проходящий сквозь отверстие с градуированной шкалой в измерительной пластине.
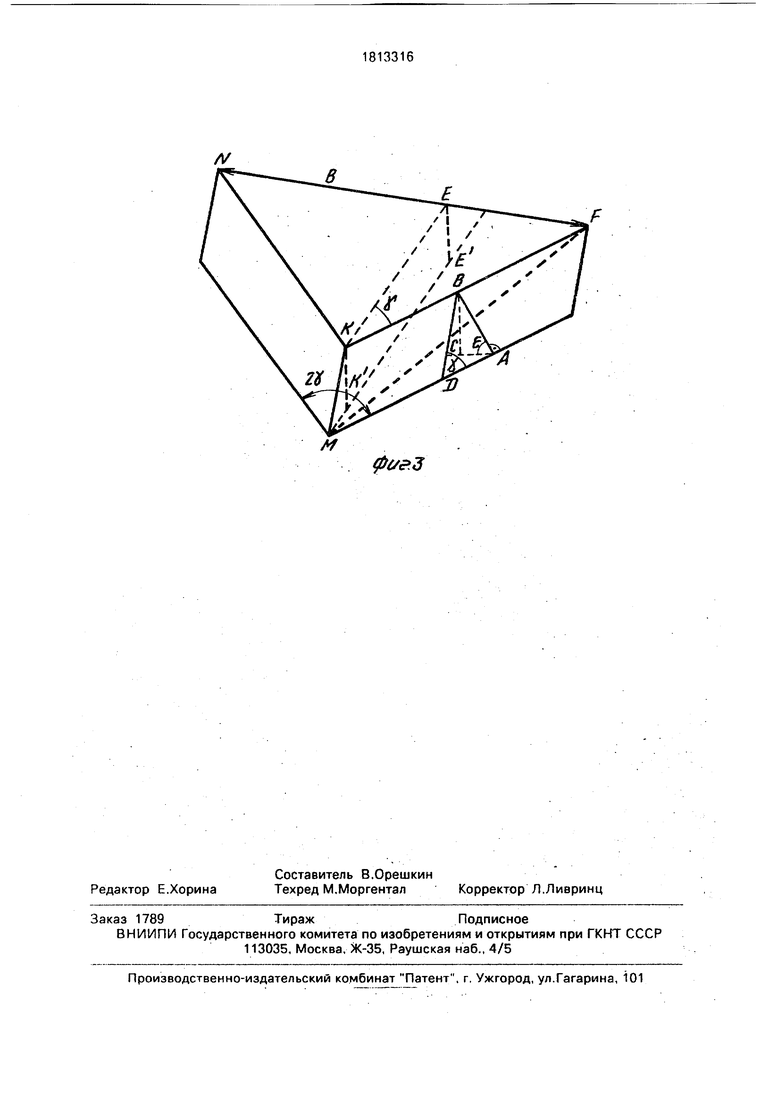
Расстояние, на которое необходимо передвинуть клин, подучено из соотношения конструктивных параметров клина (фиг.З), Движение пласта относительно рабочей поверхности клина возможно в зависимости от реологических свойств почвы по двум траекториям движения: от минимума МК до максимума MF.
ВА L - ширина трехгранного клина; ВАС Ј - угол постановки лемеха к дну борозды;
CDA у- 1 /2 угла раствора трехгранного клина;
- 1 /2 ширины захвата трехгранного клина.
Необходимо найти расстояние, на которое необходимо продвинуть клин. Это расстояние (CD MK), которое соответствует траектории МК ()
А ВАС - прямоугольный, отсюда СА ВА со$Ј,(1) A DCA - прямоугольный, отсюда CD CA/siny. (2) Подставляя (1) в (2), получаем ,,„ ВА cos Ј L cos Ј ,„,
CU ---;----- - --;---- .(ol
sm уsin у
Максимальное расстояние, на которое необходимо продвинуть клин, будет определяться суммой МК + К Е
MK CD -L-J
sin у
A KEF - прямоугольный, отсюда KE EF ctgy B/2ctgy (5) Складывая (4) и (5), получаем
с ME1 МК1 + КЕ1 В/2 ctg у + ---С-Н1-. Dsin у
(6)
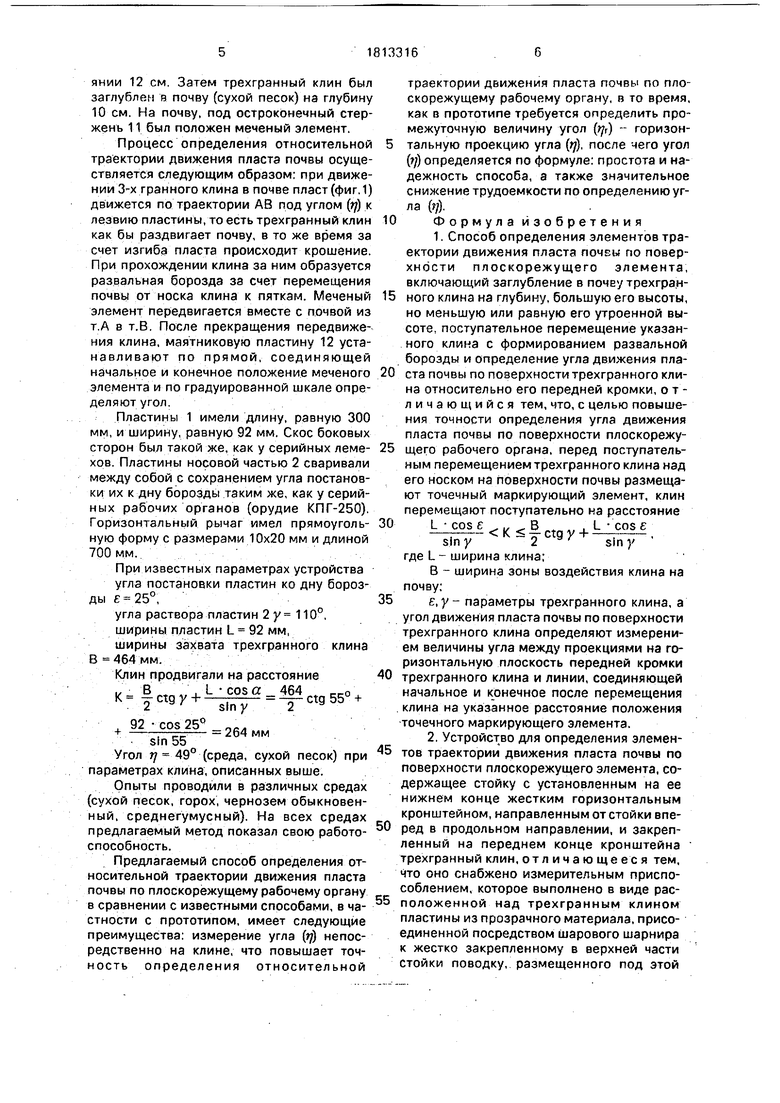
На фиг.1 изображено устройство для осуществления предлагаемого способа определения относительной траектории дви10 жения почвы (вид сверху); на фиг.2 - то же, вид сбоку; на фиг.З - рабочий орган.
Устройство для осуществления предлагаемого способа содержит (фиг.1) пластины 1 типа лемехов только меньших размеров,
15 которые соединены между собой передними (носовыми) частями 2. Угол резания пластин 1 такой же, как у серийного рабочего органа (КПГ-250). Со стороны нерабочей поверхности пластин изнутри на уровне их
20 средних линий присоединена косынка 3 для обеспечения жесткости конструкции. К косынке 3 присоединен горизонтальный рычаг 4, причем материал, размеры (длина, ширина, высота) и форма горизонтального рычага
25 4 выбраны из расчета того, чтобы он имел возможность удержать клин на заданной глубине обработки. Горизонтальный рычаг 4 присоединяется к вертикальному рычагу 5, который крепится к толкающему (двигающе30 му) устройству. Для определения угла / к вертикальному рычагу 5 с помощью поводка 7 и фиксированной шаровой головки 8 присоединена измерительная пластина 6 из прозрачного материала (оргстекла). На про35 дольной оси пластины 6 выполнены 2 отверстия (позиции не показаны), между ними выполнен вырез в виде градуированной шкалы 10, в которые вставлены остроконечные стержни, один из которых 9 закреплен
40 жестко, второй 11 соединяет измерительную пластину 6 с маятниковой пластиной 12 с возможностью вращения маятниковой пластины 12 относительно оси, совпадающей с осью остроконечного стержня 11. На
45 противоположном конце маятниковой пластины 12. жестко закреплен остроконечный стержень 13, проходящий сквозь отверстие 10 с градуированной шкалой в измерительной пластине 6.
50 Пример определения относительной траектории движения пласта почвы с помощью предлагаемого метода.
Перед определением относительной траектории движения пласта почвы измери55 тельную пластину 6, при помощи фиксированной шаровой головки 8 устанавливают параллельно пластинам 1 так, чтобы остроконечные стержни S и 11 были установлены под режущей кромкой пластин 1 ня рэсстоянии 12 см. Затем трехгранный клин был заглублен в почву (сухой песок) на глубину 10 см. На почву, под остроконечный стержень 11 был положен меченый элемент.
Процесс определения относительной траектории движения пласта почвы осуществляется следующим образом: при движении 3-х гранного клина в почве пласт (фиг. 1) движется по траектории АВ под углом (у) к лезвию пластины, то есть трехгранный клин как бы раздвигает почву, в то же время за счет изгиба пласта происходит крошение. При прохождении клина за ним образуется развальная борозда за счет перемещения почвы от носка клина к пяткам. Меченый элемент передвигается вместе с почвой из т.А в т.В. После прекращения передвижения клина, маятниковую пластину 12 устанавливают по прямой, соединяющей начальное и конечное положение меченого элемента и по градуированной шкале определяют угол.
Пластины 1 имели длину, равную 300 мм, и ширину, равную 92 мм. Скос боковых сторон был такой же, как у серийных леме- хов. Пластины носовой частью 2 сваривали между собой с сохранением угла постановки их к дну борозды таким же, как у серийных рабочих органов (орудие КПГ-250). Горизонтальный рычаг имел прямоуголь- ную форму с размерами 10x20 мм и длиной 700 мм..
При известных параметрах устройства
угла постановки пластин ко дну борозды Е 25°,
угла раствора пластин 2 у 110°,
ширины пластин L 92 мм,
ширины захвата трехгранного клина В 464 мм.
Клин продвигали на расстояние
В
L cos а 464
К -Јctgv +
2 . sin у
92 -cos 25° „.„
+ ------ 264 мм
ctg 55° +
sin 55 Угол г - 49° (среда, сухой песок) при параметрах клина, описанных выше.
Опыты проводили в различных средах (сухой песок, горох, чернозем обыкновенный, среднегумусный). На всех средах предлагаемый метод показал свою работе- способность.
Предлагаемый способ определения относительной траектории движения пласта почвы по плоскорежущему рабочему органу в сравнении с известными способами, в частности с прототипом, имеет следующие преимущества: измерение угла (rj) непосредственно на клине, что повышает точность определения относительной
5 0 5 0
5 0
5
0
ц &
5
траектории движения пласта почвы по плоскорежущему рабочему органу, в то время, как в прототипе требуется определить промежуточную величину угол (rjj - горизонтальную проекцию угла ($, после чего угол (/) определяется по формуле: простота и надежность способа, а также значительное снижение трудоемкости по определению угла (у.
Формула изобретения 1. Способ определения элементов траектории движения пласта почвы по поверхности плоскорежущего элемента, включающий заглубление в почву трехгранного клина на глубину, большую его высоты, но меньшую или равную его утроенной высоте, поступательное перемещение указанного клина с формированием развальной борозды и определение угла движения пласта почвы по поверхности трехгранного клина относительно его передней кромки, о т- личающийся тем, что, с целью повышения точности определения угла движения пласта почвы по поверхности плоскорежущего рабочего органа, перед поступательным перемещением трехгранного клина над его носком на поверхности почвы размещают точечный маркирующий элемент, клин перемещают поступательно на расстояние L cos Ј к -cose sin у KS2Ct9y+ sin у где L - ширина клина; В - ширина зоны воздействия клина на почву;
Е,у- параметры трехгранного клина, а угол движения пласта почвы по поверхности трехгранного клина определяют измерением величины угла между проекциями на горизонтальную плоскость передней кромки трехгранного клина и линии, соединяющей начальное и конечное после перемещения клина на указанное расстояние положения точечного маркирующего элемента.
2, Устройство для определения элементов траектории движения пласта почвы по поверхности плоскорежущего элемента, содержащее стойку с установленным на ее нижнем конце жестким горизонтальным кронштейном, направленным от стойки вперед в продольном направлении, и закрепленный на переднем конце кронштейна трехгранный клин, отличающееся тем, что оно снабжено измерительным приспособлением, которое выполнено в виде расположенной над трехгранным клином пластины из прозрачного материала, присоединенной посредством шарового шарнира к жестко закрепленному в верхней части стойки поводку, размещенного под этой
пластиной точечного маркирующего элемента для установки его на поверхности по- чвы над носком трехгранного клина, выполненных на продольной оси симметрии пластины двух отверстий с установленным в каждом из них остроконечным стержнем и расположенного поперечно между отверстиями сквозного дугообразного паза с градусной шкалой на его стенке, при этом остроконечный стержень, расположенный дальше от носка трехгранного клина, жестко закреплен в-отверстии пластины, а на стержне, расположенном ближе к носку клина, установлена с возможностью
свободного поворота относительно его продольной осевой линии указательная пластина, на другой конце которбй жестко закреплен третий остроконечный стержень, размещенный в дугообразном пазу прозрачной пластины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения элементов траектории движения пласта почвы по поверхности плоскорежущего элемента | 1990 |
|
SU1771549A1 |
| Рабочий орган культиватора | 1990 |
|
SU1722264A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОЙ ТРАЕКТОРИИ ДВИЖЕНИЯ МАТЕРИАЛА ПО ТРЕХГРАННОМУ КЛИНУ ПОЧВООБРАБАТЫВАЮЩЕГО РАБОЧЕГО ОРГАНА | 2001 |
|
RU2195796C2 |
| Способ определения относительной траектории движения пласта почвы по плоскорежущему рабочему органу | 1984 |
|
SU1268120A1 |
| Плоскорежущая лапа | 1982 |
|
SU1068056A1 |
| РАБОЧИЙ ОРГАН ДЛЯ БЕЗОТВАЛЬНОЙ ОБРАБОТКИ ПОЧВЫ | 1993 |
|
RU2050760C1 |
| Комбинированный плоскорез-щелеватель для почвозащитной обработки почв, подверженных водной, ветровой и механической эрозиям | 2023 |
|
RU2804099C1 |
| Мелиоративный плуг | 2018 |
|
RU2681284C1 |
| Плоскорежущая лапа | 1990 |
|
SU1773307A1 |
| Рабочий орган орудия для обработки почвы | 1981 |
|
SU1052175A1 |
Использование: в сельскохозяйственном машиностроении, в частности в способах и устройствах по измерительной технике для с/х машин. Сущность изобретения: способ предусматривает определение элементов траектории движения пласта почвы по рабочей поверхности режущего элемента с помощью заглубления в почву трехгранного клина на определенную глубину с измерением параметров этого клина и его перемещения в почве. Устройство для осуществления этого способа представляет собой размещаемое над трехгранным клином измерительное приспособление, выполненное в виде прозрачной пластины с градуированной шкалой и маркирующего элемента, который в процессе перемещения клина в почве движется по поверхности разрыхляемого пласта под прозрачной пластиной. 2 с.п. ф-лы, 3 ил.
/////,
фие.
фиг. 2
pt/аЗ
| Способ определения относительной траектории движения пласта почвы по плоскорежущему рабочему органу | 1984 |
|
SU1268120A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
