Изобретение относится к пневмогид- равлическим подвескам транспортных средств, в частности к системам регулирования их характеристик.
Известна серийная пневмогидравличе- ская подвеска автосамосвала особо большой грузоподъемности типа БелАЗ-7519. Основным узлом ее является пневмогидрав- лический цилиндр, который выполняют функции пенвматической рессоры поршневого типа и двухстороннего гидравлического амортизатора.
Недостатком известного устройства является неизменность характеристик подвески при движении транспортного средства, что делает ее не адаптивной с точки зрения плавности хода к постоянно меняющимся внешним условиям (воздействиям от микропрофиля дороги).
Известна также система регулирования характеристики подвески транспортного средства, которая улучшает динамические свойства подвески, а именно, плавность хода. Это достигается тем, что система снабжена акселерометром, установленным непосредственно на балке моста транспортного средства, датчиком прогиба упругого элемента, а также датчиком перепада давления. Их выходы через формирующие блоки связаны с усилителем-преобразователем, который управляет электрогидравлическим золотниковым регулятором, соединенным с системой гидропитания.
Недостатком известного устройства является недостаточно высокая плавность хода транспортного средства и большие энергозатраты на регулирование.
Цель изобретения - улучшение плавности хода транспортного средства и снижение энергозатрат.
Указанная цель достигается тем, что система регулирования характеристики под- вески транспортного средства, содержащая установленный между рамой и мостом пневмогидравлический цилиндр без противодавления, включающий поршневую полость с газовой пружиной и кольцевую штоковую полость, а также содержащая регуляторы
уровня корпуса с системой гидрообеспече- иия, усилители-преобразователи, датчики линейного перемещения и ускорения штока пневмогидравлического цилиндра и датчики давления в его полостях, задающий
блок и блоки формирования, согласно изобретению снабжена блоком компенсации, входами соединенным с датчиками давления в полостях пневмогидравлического цилиндра, а выходом подключенный к
усилителю-преобразователю через блок формирования, а поршневая полость с газовой пружиной и кольцевая штоковая полость пневмогидравлического цилиндра герметично отделены друг от друга, причем
кольцевая штоковая полость подсоединена к системе гидрообеспечения через регулятор уровня, который соединен с датчиками линейного перемещения и ускорения штока пневмогидравлического цилиндра, задающим блоком и через блок компенсации с датчиками давления в полостях пневмогидравлического цилиндра, а поршневая полость с газовой пружиной подсоединена к системе гидрообеспечения через регулятор
уровня, который соединен только с датчи- ком линейного перемещения штока пневмогидравлического цилиндра и задающим блоком. Это позволяет регулировать характеристики подвески при движении транспортного средства только через кольцевую штоковую полость пневмогидравлического цилиндра, а статическое регулирование может осуществляться через поршневую полость с газовой пружиной.
Сопоставительный анализ с прототипом показывает, что заявляемая система регулирования характеристики подвески отличается тем, что она снабжена блоком компенсации, входами соединенным с датчиками давления в полостях пневмогидрав- лического цилиндра, а выходом подключенный к усилителю-преобразователю через блок формирования, а поршневая полость с газовой пружиной и кольцевая штоковая полость пневмогидравлического цилиндра герметично отделены друг от друга, причем кольцевая штоковая полость подсоединена к системе гидрообеспечения через регулятор уровня, который соединен с датчиками линейного перемещения и ускорения штока, задающим блоком и через блок компенсации с датчиками давления в полостях пневмогидравлического цилиндра, а поршневая полость с газовой пружиной подсоединена к системе гидрообеспечения через регулятор уровня, который соединен только с датчиком линейного перемещения штока и задающим блоком. Таким образом, заявляемая система регулирования характеристики подвески транспортного средства соответствует критерию изобретения новизна.
Сравнение заявляемого технического решения (системы регулирования характеристики подвески транспортного средства) не только с прототипом, но и с другими техническими решениями в данной области техники не позволило выявить в них признаки, отличающие заявленное решение от прототипа, что позволяет сделать вывод о соответствии его критерию существенные отличия.
На фиг.1 представлена схема предлагаемой системы регулирования характеристики подвески транспортного средства (общий вид); на фиг.2 изображен пневмо- гидравлический цилиндр, используемый в предлагаемой системе регулирования.
Система регулирования характеристики подвески транспортного средства (фиг.1) содержит пневмогидравлический цилиндр 1 без противодавления, кольцевая штоковая полость I которого через внутренний трубопровод 2 и внешний гибкий трубопровод 3 соединяется с системой гидрообеспечения 4 через регулятор уровня 5, а поршневая полость II с газовой пружиной соединяется через внутренний трубопровод б и внешний гибкий трубопровод 7 с системой гидрообеспечения 4 через регулятор уровня 8. Датчик 9 давления, включенный в магистраль кольцевой штоковой полости I пневмогидравлического цилиндра 1 и датчик 10 давления, включенный в магистраль поршневой полости II. выходами соединены с входами блока компенсации 11, выход которого соединен через блок формирования 12 с входом усилителя-преобразователя 13, к другим входам которого, через
блок формирования 14 подсоединен датчик 15 ускорения (акселерометр), усглновлен- . ный на штоке пневмогидравлического цилиндра 1, датчик .16 линейного перемещения штока через блок формирования 17, задающий блок 18 через блок формирования 19. Выход усилителя-преобразователя 13 соединен с входом регулятора уровня 5. Усилитель-преобразователь 20 входами через
0 блок формирования 21 и блок формирования 22 соответственно подсоединен к датчику 16 линейного перемещения штока и задающему блоку 18, а выходом соединен со входом регулятора уровня 8.
5Система регулирования характеристики
подвески транспортного средства работает следующим образом. При наезде колеса транспортного средства на неровность дороги в виде уступа, на шток пневмо гидрав0 лического цилиндра 1 действует сила, направленная вверх. В результате этого изменяются давления в полостях цилиндра I и II. Сигналы с датчиков давления 9 и 10 поступают на блок компенсации II, где вы5 рабатывается сигнал управления, пропорциональный изменению разности давлений в полостях пневмогидравлического цилиндра с учетом статического давления от газовой пружины в полости II.
0 Давление в полости II повышается, а в полости I уменьшается. Через блок формирования 12 сигнал управления поступает она усилитель-преобразователь 13, а с него на электромагнитную катушку электрогидрав5 лического золотникового регулятора уровня 5. Плунжер золотника регулятора перемещается так, что штоковая полость I соединяется с напорной магистралью системы гидрообеспечения 4. Под действием
0 избыточного давления рабочей жидкости шток начинает перемещаться вверх, перемещая в вертикальной плоскости и колесо. Ускорение перемещения штока измеряет датчик 15 ускорения, сигнал с которого по5 ступает на блок формирования 14, который представляет собой блок двойного интегри1 рования. В этом блоке осуществляется двойное интегрирование измеренного акселерометром ускорения, в результате чего
0 получается величина вертикального перемещения штока, а следовательно и колеса в функции времени. Таким образом, в каждый момент времени известна величина вертикального перемещения колеса, т.е. на выхо5 де блока 14 вырабатывается информация о неровности дороги. По сигналам этого блока регулятор 5 управляет штоком цилиндра так, что колесо обкатывает неровность, а корпус транспортного средства при этом сохраняет в пространстве свое положение.
После заезда на неровность дороги изменится положение штока. Сигнал с датчика 16 перемещения штока, поступающий через блок формирования на усилитель-преобразователь 13, будет точно равен сигналу на выходе блока 14, т.е. колесо относительно корпуса фиксируется в том положении, в котором оно оказалось на неровности, Через время, равное времени памяти транспортного средства, блок формирования 17 снимает сигнал управления по перемещению штока. Золотник регулятора 5 перемещается и соединяет штоковую полость I со сливной магистралью системы гидрообеспечения 4. Под действием избыточного давления в полости II шток выдвигается и корпус транспортного средства занимает прежнее статическое положение, определяемое лишь жесткостью газовой пружины и нагрузкой. Под временем памяти понимается продолжительность затухания колебаний транспортного средства, как колебательной системы. У автосамосвала типа БелАЗ-7519 время памяти составляет 3...4 с. С хорошим запасом время отработки сигнала блоком формирования 17 может составлять 6...8 с.
При попадании колеса в впадину в полостях I и II пневмогидравлического цилиндра 1 возникает изменение«перепада давления, которое измеряется датчиками 9 и 10. В блоках 11 и 12 вырабатывается сигнал управления на перемещение золотника регулятора 5, так чтобы соединить штоковую полость I со сливной магистралью. Под действием давления газовой пружины и собственного веса шток с колесом перемещается вниз. Датчик 15 ускорения замеряет ускорение и подает сигнал на вход блока формирования 14, на выходе которого появляется сигнал о величине впадины. Дальнейшая работа системы происходит по сигналам управления, которые вырабатываются усилителем-преобразователем 13, т.е. регулирование осуществляется только путем изменения дросселирующего отверстия в регуляторе 5 за счет давления газовой пружины в полости II.
Регулирование статических характеристик подвески транспортного средства при изменении его загрузки, движении по повороту, движении на подъем и т.д., осуществляется от задающего блока 18 и датчика 16 перемещения штока, сигналы с которых через блоки формирования 22 и 21 подаются на усилитель-преобразователь 20. В усилителе-преобразователе 20 вырабатывается сигнал управления на регулятор 8, который перемещает золотник так, что поршневая полость I соединяется с напорной или сливной магистралью системы гидрообеспечения 4, В результате чего изменяются статические характеристики подвески и положение корпуса транспортного средства. Датчик 16 линейного перемещения штока позволяет автоматически поддерживать заданное статическое положение корпуса, т.к. блок формирования 21 вырабатывает сигнал управления через время,
равное времени памяти транспортного средства.
Таким образом, система регулирования позволяет улучшить плавность хода транспортного средства не только за счет регулирования характеристик подвески при его движении, но и за счет изменения ее статических характеристик, а также уменьшить энергозатраты для динамического регулирования за счет использоаания системы
гидрообеспечения для подачи рабочей жидкости только в одну штоковую полость пневмогидравлического цилиндра.
Формула изобретения
Система регулирования характеристики
подвески транспортного средства, содержащая установленный между рамой и мостом упругий элемент и гидроцилиндр, соединенный с системой гидрообег.печения
через регулятор уровня корпуса, акселерометр, установленный рядом с колесом, связанный через двойной интегратор и усилитель с указанным регулятором, датчик давления в полостях гидроцилиндра и датчик прогиба упругого элемента, которые подключены к усилителю через блоки формирования, отличающаяся тем, что, с целью улучшения плавности хода транспортного средства и снижения энергозатрат на управление, упругий элемент в гидроцилиндр выполнены в виде цилиндра без противодавления, снабженного газовой пружиной, размещенной в поршневом полости, причем поршневая полость с газовой
пружиной и кольцевая штоковая полость герметично отделены одна от другой, система содержит блок компенсации, входами соединенный с датчиками давления в полостях указанного цилиндра, а выходом
подключенный к усилителю через блок формирования, при этом кольцевая штоковая полость подсоединена к системе гидрообеспечения через регулятор уровня, который соединен с датчиками линейного
перемещения и ускорения штока пневмогидравлического цилиндра, задающим блоком и через блок компенсации с датчиками давления в полостях пневмогидравлического цилиндра, а поршневая полость с газовой пружиной подсоединена к системе
гидрообеспечения через регулятор уровня, ного перемещения штока пневмогидравли- который соединен только с датчиком линей- ческого цилиндра и задающим блоком.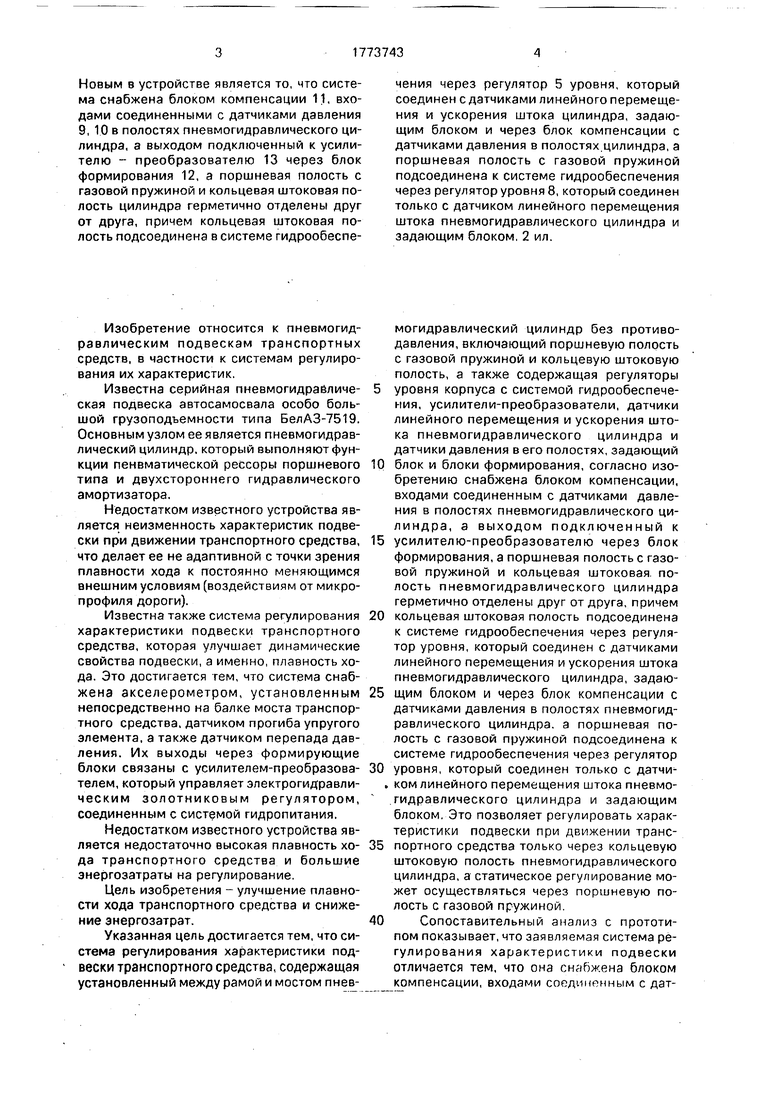


| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗОТЕРМИЧЕСКИЙ ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 2004 |
|
RU2280791C1 |
| ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 2006 |
|
RU2313013C1 |
| ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 2005 |
|
RU2333403C2 |
| Активная пневмогидравлическая подвеска транспортного средства | 1980 |
|
SU901087A1 |
| УПРАВЛЯЕМАЯ ПОДВЕСКА | 2003 |
|
RU2240930C1 |
| Система автоматического регулирования характеристики подвески транспортного средства | 1980 |
|
SU998147A1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ РЕССОРА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2319620C1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ РЕССОРА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2212344C1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ РЕССОРА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2090377C1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ РЕССОРА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2089407C1 |
Изобретение относится к пневмогид- равлическим подвескам транспортных средств, в честности к системам регулирования их характеристик. Цель изобретения - улучшение плавности хода транспортного средства и снижение энергозатрат, Система содержит установленный между рамой и мостом пкевмогидравлический цилиндр без противодавления, включающий поршневую полость II с газовой пружиной и кольцевую штоковую полость I, а также содержащая регуляторы 5 уровня корпуса с системой гидрообеспечения, усилители - преобразователи 13, 20, датчики линейного перемещения 16 и ускорения штока 15 пневмогидравлического цилиндра и датчики давления 9, 10 в его полостях, задающий блок 18 и блоки формирования 12,14, 17,19,
/(регулятору 5
К регулятору в
| Система регулирования характеристики подвески транспортного средства | 1984 |
|
SU1308509A1 |
