Изобретение относится к подвескам транспортных средств, в частности к ристемам регулирования их характеристик.
1 Цель изобретения - повьшение эффективности.
На чертеже изображена принципиальная схема системы регулирования характеристики подвески транспортного средства.
Система регулирования, характеристики подвески транспортного средства содержит акселерометр 1, установленный непосредственно на балке моста транспортного средства рядои с колесом. Выход его связан с входом сумматора 2, который выходом связан с входом усилителя-преобразователя 3„ Вход последнего связан с датчиком 4
fO
5
ния получается вегшчина вертикального перемещения колеса в функции времени .
Таким образом, в любой момент вре мени известна величина вертикального перемещения колеса, т.е. на выходе сумматора 2 получается информация о неровности дороги. Ошибка измерения неровности обусловлена только.измене нием прогиба шины, которое на малых и средних скоростях незначительно
Однако в сумматоре 2 применять чистое двойное интегрирование нецелесообразно, так как для обеспечения плавности хода достаточно компенсировать неровности несколько ниже собственной частоты транспортного средства (. ) 0,5-1 Гц). В этом случае достаточно вместо каждоперепада давлений через блок 5 форми- 20 го интегр.ала установить инерционный
|рования и с датчиком 6 прогиба упругого элемента 7 через блок 8 формирования, а выход преобразователя 3 связан с катушкой злектромагнита регулятора 9 уровня кузова. Между рамой транспортного средства и балкой моста установлен гидравлический цилиндр 10, работа которого обеспечивается системой 11 гидропитания.
При наезде колеса транспортного средства на неровность дороги- уступ на шток гидроцилиндаа 10 непосредственно действует сила вверх. В результате в полостях гидроцилиндра возникает перепад давления, который замеряет дифференциальный датчик 4 давления (в верхней полости повышенное давление по сравнению с нижней полостью) . По сигналу датчика 4 в блоке 5 формируется в зависимости от вида графика перепада давления по времени сигнал управления, который поступает на усилитель-преобразователь 3. Далее сигнал поступает на регулятор 9.
Золотник регулятора перемещается так, 45 ва, содержащая установленный между
что верхняя полость гидроцилиндра 10 сообщается со сливной магистралью системы 11 гидропитания, а нижняя - с напорной магистралью. Поршень перемещается вверх и тем самым снимает усилие со штока. Вместе с поршнем вверх перемещается и колесо, Ускоре- ние вертикального перемещения колеса измеряет акселерометр 1, сигуап с которого поступает на сумматор 2. В нем осуществляется двойное интегрирование измеренного акселерометра 1 ускорения. В результате интегрирова
5
ния получается вегшчина вертикального перемещения колеса в функции времени .
Таким образом, в любой момент времени известна величина вертикального перемещения колеса, т.е. на выходе сумматора 2 получается информация о неровности дороги. Ошибка измерения неровности обусловлена только.изменением прогиба шины, которое на малых и средних скоростях незначительно
Однако в сумматоре 2 применять чистое двойное интегрирование нецелесообразно, так как для обеспечения плавности хода достаточно компенсировать неровности несколько ниже собственной частоты транспортного средства (. ) 0,5-1 Гц). В этом случае достаточно вместо каждофильтр с памятью
Т«,т/1
2llf
М«(Н.
cofie-re.
и 0,3.
С хорошим запасом принимают Т,
1,0-2,0 с. По сигналам, поступающим с блока дЕюйного интегрирования (программа по неровностям), вырабатывается сигнал управления в функхщи времени так, чтобы сохранить положение кузова в пространстве - фиксируется положение колеса относительно кузова в том положении, в котором оно оказалось на неровности. При этом кузов не перемещается, так как сигнал с датчика 6 прогиба упругого элемента 7 и блока 8 точно равен поданному сигналу с сумматора 2.
Формула изобретения
Система регулирования характеристики подвески транспортного средстрамой и мостом гидроцилиндр, соединенный с р егулятором уровня кузова, акселерометр, связанный через сумматор и усилит(шь с указанным регуля50 тором, отличающаяся тем, что, с целью повьш5ения эффективности, она снабжена датчиком перепада давления в полостях гидроцилиндра и датчиком прогиба упругого элемента, кото55 рые подключены к усилителю, а акселерометр установлен непосредственно на балке моста транспортного средства рядом с колесом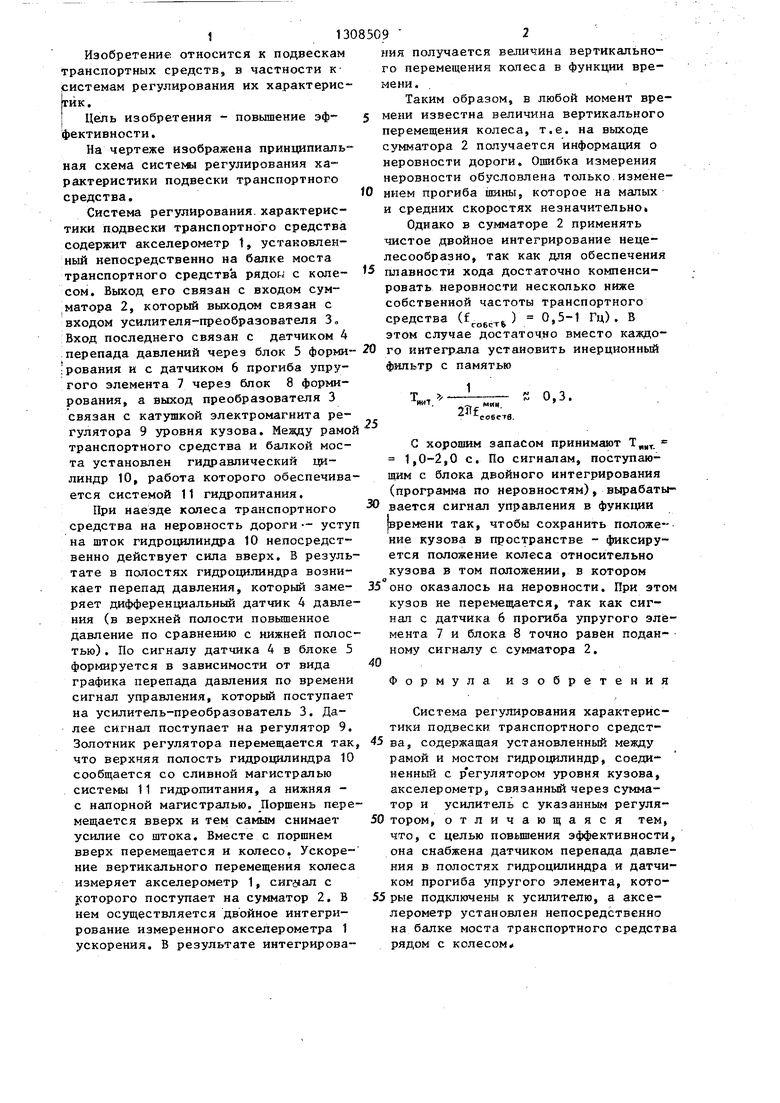
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования характеристики подвески транспортного средства | 1989 |
|
SU1708667A1 |
| Система регулирования характеристики подвески транспортного средства | 1991 |
|
SU1794699A2 |
| Система регулирования характеристики подвески транспортного средства | 1990 |
|
SU1773743A1 |
| Система автоматического регулирования характеристики подвески транспортного средства | 1980 |
|
SU998147A1 |
| Подвеска транспортного средства | 1980 |
|
SU1031803A1 |
| ИЗОТЕРМИЧЕСКИЙ ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 2004 |
|
RU2280791C1 |
| ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 2006 |
|
RU2313013C1 |
| ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 2005 |
|
RU2333403C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ, КРИВИЗНЫ, НЕРОВНОСТИ И КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162202C1 |
| КОМБИХОД | 2007 |
|
RU2347709C2 |
Изобретение относится к подвескам транспортных средств, в частности к системам регулирования их характеристик. Цель - повьшение эффективности. Система регулирования характеристики подвески транспортного средства содержит акселерометр 1, установленный непосредственно на балке моста транспортного средства рядом с колесом. Выход его связан с входом сумматора 2, который по выходу связан с входом усилителя-преобразователя 3. Вход последнего связан с датчиком 4 перепада давлений через блок формирования 5 и с датчиком 7 прогиба упругого элемента через блок формирования 8, а выход преобразователя 3 связан с катушкой электромагнита регулятора 9 уровня кузова. Между рамой транспортного средства и балкой моста установлен гидравлический цилиндр 10, работа которого обеспечивается системой гидропитания 11. 1 ил. (Л ЗЗЕНШ 2L га 00 СП
| Система гидравлического управления подвеской автомобиля | 1984 |
|
SU1278253A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
