Изобретение относится к измерительной технике и может быть использовано в делительных машинах, предназначенных для нарезания дифракционных решеток.
Известно устройство управления приводом делительной машины, содержащее подвижную и неподвижную части делительной машины, привод, связанный с подвижной частью делительной машины, последовательно соединенные датчик перемещений и блок отсчета перемещений, выход которого соединен с управляющим входом привода.
Недостатком данного устройства применительно к делительным машинам для деления дифракционных решеток является
малая точность позиционирования подвижной части в периоды нанесения очередных штрихов. В зти периоды подвижная.часть претерпевает дрейф под действием упругих деформаций привода, накопленных при подаче подвижной части в положение позиционирования. Величина дрейфа является неконтролируемой, зависит от целого ряда факторов и флуктуации этой величины проявляются на дифракционных решетках как ошибки деления.
Наиболее близким техническим решением к изобретению является устройство управления приводом делительной машины, содержащее неподвижную и подвижную части делительной машины, приводы грубого и точного перемещений, последовательно связанные кинематически с подвижной частью делительной ма.шины, модулированный дифференциальный фотоэлектрический датчик перемещений, выполненный в виде двух источников света, измерительной и индикаторной шкал с нанесенными на них растровыми решетками и фотоприемника, причем измерительная шкала соедмнена с неподвижной частью делительной машины, модулированный дифференциальный фотоэлектрический датчик перемещений, выполненный в виде двух источников света, измерите./1ьной и индикаторной шкал с нанесенными на них растровыми решетками и фотоприемника, причем измерительная шкала соединена с неподвижной частью делительной машины, растровая решетка нанесена на индикаторную шкалу в виде двух растров, сдвинутых один относительно другого на половину периода растра и каждый источник света оптически сопряжен с фотоприемником.через один из растров, синхронный детектор и мультивибратор, причем первый выход мультивибратора соединен с первым источником света м управляющим входом синхронного детектора, второй выход - со вторым источником света, выход фотоприемника связан со входом привода грубых перемещений через последовательно соединенные детектор и блок отсчета перемещений и с сигнальным входом синхронного детектора - через ключ, управляющий вход которого свлзан с выходом блока отсчета перемещет- й. В этом устройстве заеден управляемый привод точных перемещений (в качестве которого могут служить пьезоэлектрический или агнитострикционный элементы ), установленный в кинематической цепи, связывающей привод грубых перемещений с подвижной частью, а кроме того обеспечивается замкнутый контур автоматического регулирования положения подвижной части. За счет этого осуществляется позиционирование подвижной части в определенные периоды работы устройства. После подачи подвижной части в положение
ее очередного позиционирования, когда срабатывает блок отсчета перемещений, ключ открывается и замыкает контур регулирования положения подвижной части. В результате исходная величина дрейфа, как и
ее флуктуации, уменьшается в К + 1 раз, где К - коэффициент усиления разомкнутой системы регулирования.
Недостатком данного устройства является ограниченная возможность достижения точности позиционирования
подвижной части. Это ведет к образованию ошибок деления и прежде всего случайных (местных ошибок), сравнительно медленно изменяющихся по ширине нарезки. Это связано с тем. что вышеуказанная система регулирования всегда характеризуется
некоторым (и не слишком большим) критическим значением коэффициента К (обозначим его К ), выше которого увеличивать этот коэффициент нельзя - в системе возникают автоколебания.
Согласно теории автоматического регулирования возможность оптимизации (повышения) коэффициента К определяется возможностью увеличения отношения постоянных времени Ti и Т2 в уравнении разомкнутой системы регулирования (включающей объект регулирования - подвижную часть - и регулятор)
dS
+ S() Fb, ,
где S - величина дрейфа; t-время;
Fb - функция возмущения положения подвижной части (в нашем случае можно Q принять Fb Sb, где 5ь - деформация привода подвижной части).
Таким образом, К г-. При этом уменьшить Т2 нельзя, поскольку ее величина определяется в основном инерционной массой подвижной части и частично инерционностью (временем запаздывания) фильтрующих элементов регулятора. (Хотя инерция элементов регулятора сведена к
Q минимуму за счет оптимизации структуры устройства-прототипа),
Увеличение инерционности регулятора (постоянной TI) выше некоторой величины невозможно, поскольку тогда регулятор не
5 сможет следить за меняющейся величиной дрейфа и реагировать на ее увеличение,
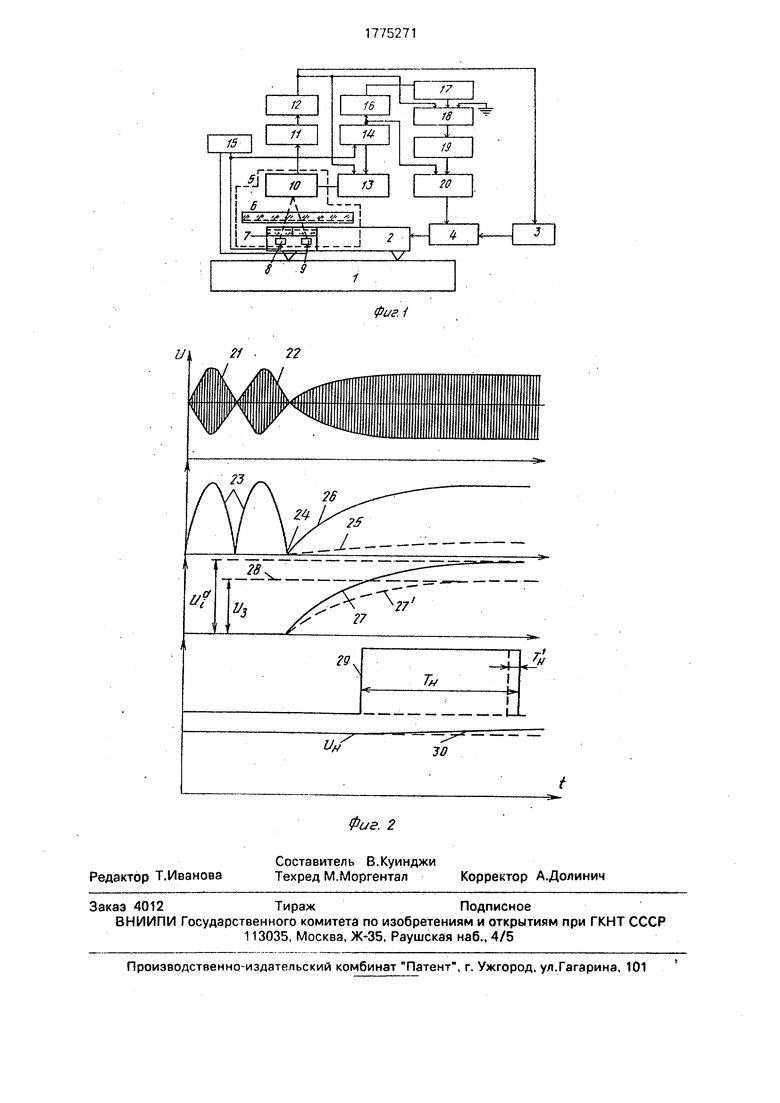
Цель изобретения - повышение точности деления. На фиг, 1 представлена блок-схема устройства; на фиг. 2 - временные диаграммы сигналов, формируемых на выходах блоков устройства. Устройство содержит неподвижную 1 и подвижную 2 части. С подвижной частью 2 связаны кинематически последовательно соединенные приводы грубого 3 и точного 4 перемещений. Модулированный дифференциальный датчик 5 перемещений подвижной части 2 включает в себя измерительную шкалу б, установленную на неподвижной части 1, и индикаторную шкалу 7, закрепленную на подвижной части 2. На обеих шкалах нанесены растровые решетки, причем растровая решетка нанесена на индикаторную шкалу 7 в виде двух растров, сдвинутых один относительно другого на половину периода растра. Датчик перемещений 5 включает в себя также два источника света 8 и 9 и фотоприемник 10, причем каждый источник света сопряжен оптически с фотоприемником 10 через соответствующий растр индикаторной шкалы 7. Электронная схема устройства содержит последовательно связанные детектор 11 и блок отсчета перемещений 12, посредством которых выход фотоприемника 10 соединен со входом привода грубых перемещений 3. К выходу фотоприемника 10 подключены также последовательно соединенные ключ 13 и синхронный детек-ор 14. Управляющий вход ключа 13 подключен к выходу блока отсчета перемещений 12. Устройство содержит мультивибратор 15, оба противоположных входа которого соединены с источниками света 8 и 9, а один из выходов соединен также с управляющим входом синхронного детектора 14. Сигнальный выход синхронного детектора 14 связан со входом привода точных перемещений 4 посредством введенных в устройство последовательно связанных компаратора 16, накопителя 17, переключателя 18, RC-цепочки 19 и сумматора 20. При этом второй сигнальный вход переключателя 18 заземлен, его управляющий вход подключен к блока отсчета перемещений 12, второй вход сумматора 20 связан с выходом синхронного детектора 14. Устройство работает следующим образом. Мультивибратор 15 формирует прямоугольные импульсы, поступающие в противофазе на источники света 8 и 9. Измерительная 6 и индикаторная 7 шкалы образуют растровое сопряжение, которое при перемещении подвижной части 2 относительно неподвижной части 1 модулирует световые потоки, формируемые источниками света 8 и 9. Благодаря взаимному сдвигу растровых решеток, нанесенных на индикаторную шкалу 7 на величину, равную половине периода растра, электрические сигналы, снимаемые с фотоприемника 10 содержат две огибающие 21 и 22 (фиг. 2), сдвинутые одна относительно другой на 180° С. Частота и фаза сигналов, формирующих огибающие, определяется частотой сигналов, формируемых мультивибратором 15 и фазой муаровых полос датчика 5. Огибающие детектируются по модулю детектором 11; однополярные колебания 23 с его выхода поступает на вход блока отсчета перемещений 12. В процессе подачи подвижной части 2 относительно неподвижной 1 приводом грубых перемещений 3 блок 12 просчитывает заданное число колебаний 23. После этого на выходе блока 12 формируется сигнал, отключающий привод грубых перемещений 3 (и одновременно включаюш.ий ключ 13 и переключатель 18) и прекращающие тем самым подачу подвижной части 2. Затем начинаются дрейфовые смещения 5 подвижной части 2. Сигнал с выхода фотоприемника 10 поступает через ключ 13 на сигнальный вход синхронного детектора 14. Опорный сигнал на управляющий вход синхронного детектора 14 поступает с выхода мультивибратора 15. Синхронный детектор 14 осуществляет, синхронное (фазочувствительное) детектирование огибающих сигнала, снимаемого с фотоприемника 10. На выходе детектора 14 формируется сигнал, равный по величине разности огибающих, с полярностью определяемой соотношением фаз его входного и опорного сигналов. Включение синхронного детектора 14 ключом 13 осуществляется вблизи точки 24, где амплитуда сигнала близка к нулю. Корректирующее напряжение с выхода синхронного детектора 14 подается через сумматор 20 на вход привода точного перемещения 4, вызывает его деформацию. В результате величина дрейфа (кривая 25) уменьшается по сравнению с исходной (кривая 26) в К + 1 раз. Уменьшенный по величине дрейф подвижной части 2 имеет(каки ранее)экспоненциальнуюзавиимость от времени t St-Si l-e-). де Si - асимптотическая величина дрейфа 1-м цикле деления; t - время: г-постоянная времени дрейфз. На выходе синхронного детектора 14 ыделяется корректиру ощее напряжение 4, соответствующее дрейфу:
Ui Ui(1-ehi
где Ui
асимптотическая величина напряжения..
Она примерно равна максимальному напряжению Ui, выделяемому на выходе синхронного детектора 14 в конце цикла деления (t т.
Настраивают вновь введенный контур асимптотического импульсного регулирования. Устанавливают величину напряжения сравнения из(28) компаратора 16 несколько меньшей напряжения Ui(U3 0,5 ,75Ui, а постоянную времени RC-цепочки 19 устанавливают равной постоянной гдрейфа ( г RC). При работе устройства формируется компенсирующее дрейф напряжение, изменяющееся по экспоненциальному закону. По мере увеличения напряжения Ui (27) на выходе синхронного детектора 14 в определенный момент времени оно достигнет заданного напряжения из и на выходе компаратора 16 формируется П-образный импульс 29, который сохраняется до конца цикла деления (когда выключается ключ 13 и напряжение Ui падает до нуля). Этот П-образный импульс подзаряжает накопитель 17 так, что напряжение UH (30) на выходе накопителя 17 возрастает от цикла к циклу. В начале каждого цикла позиционирования подвижной части включается переключатель 18 и напряжение UH подается на вход RC-цепочки 19, на выходе которой начинается выделяться комп,енсирующее экспоненциально возрастающее напряжение коррекцииt
Uk UH(1-ё).
Это напряжение, поданное через сумматор 20 на вход привода точного перемещения 4 вызывает его компенсирующую деформацию и за счет этого величина дрейфа уменьшается. При этом уменьшается асимптотическая величина напряжения Ui(27) на выходе синхронного детектора 14 и, соответственно, уменьшается продолжительность импульса Тн на выходе компаратора 16. В конечном итоге устанавливается стабильный режим работы накопителя 17, когда подзарядка его коротким импульсом Тк от компаратора 16 равна его разгрядке через внешние цепи.
В конце каждого цикла деления сигнал с выхода блока отсчета перемещения 12 сн 1мается, ключ 13 выключается, переключатель 18 ггереключается в исходное положение, когда его вход заземлен. RC-цепочка 19 практически мгновенно разряжается через переключатель 18 до нулевого напряжеН L1Я.
Таким образом, формируемая в устройстве компенсирующая компонента корректирующего сигнала в виде экспоненты, соответствующей по характеру дрейфу, стабилизирует его величину, резко уменьшает ее и соответственно резко уменьшает изменения во времени напряжения корректирующей компоненты сигнала. За счет этого тракт, формирующий регулирующую компоненту корректирующего сигнала можно сделать более инерционной (увеличить постоянную Ti) и за счет этого резко повысить эффективность коррекции (вместе с коэффициентом коррекции К).
Формула изобретения
Устройство управления приводом делительной машины, содержащей неподвижную и подвижную части с приводами грубого и точного перемещений, включающее модулированный дифференциальный фотоэлектрический датчик перемещения, выполненный в виде двух источников света, измерительной и индикаторной шкал с нанесенными на них растровыми решетками,
и фотоприемника, причем измерительная и индикаторная шкалы соединены с неподвижной и с подвижной частями делительной машины соответственно, растровая решетка нанесена на индикаторную шкалу в виде
двух растров-, сдвинутых один относительно другого на половину периода растра, а каждый источник света оптически сопряжен с фотоприемником через один из растров, синхронный детектор и мультивибратор,
причем первый выход мультивибратора соединен с первым источником света и управляющим входом синхронного детектора, второй выход - с вторым источником света, выход фотоприемника связан с входом привода грубых перемещений через последовательно соединенные детектор и блок отсчета перемещений и с сигнальным входом синхронного детектора через ключ, управляющий вход которого связан с выходом
блока отсчета перемещений, отличающееся тем, что, с целью повышения точности деления, сигнальный выход синхронного детектора связан с входом привода точных перемещений через введенные в устройство последовательно соединенные компаратор, накопитель, переключатель, RC-цепочку и сумматор, при этом управляющий вход переключателя подключен к выходу блока отсчета перемещений, а второй
сигнальный вход его заземлен, второй вход сумматора связан с выходом синхронного детектора.
8 9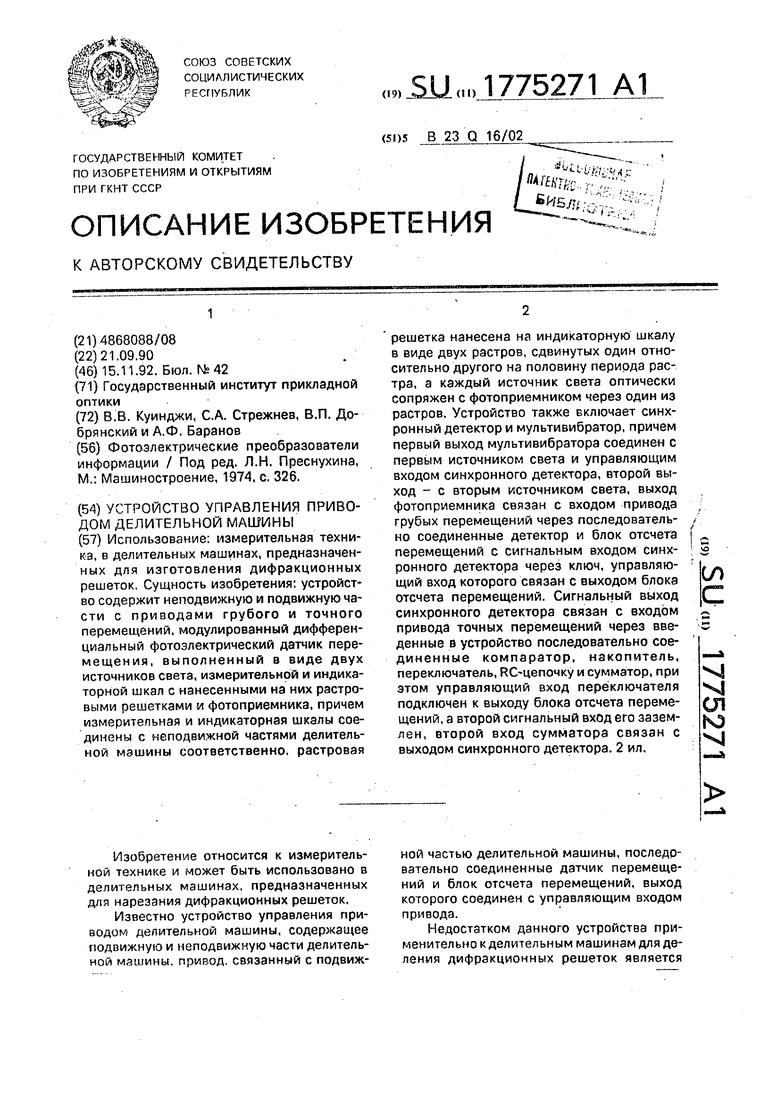



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления приводом делительной машины | 1981 |
|
SU998857A1 |
| Устройство управления приводом делительной машины | 1985 |
|
SU1280317A1 |
| Фотоэлектронное устройство для измерения линейных перемещений | 1982 |
|
SU1126816A1 |
| Фотоэлектрический преобразователь перемещения | 1989 |
|
SU1693380A1 |
| Компенсационная измерительная система | 1973 |
|
SU742702A1 |
| Фотоэлектрический растровый интерполятор | 1982 |
|
SU1072081A1 |
| Преобразователь с электрооптической редукцией | 1981 |
|
SU966722A1 |
| Фазоимпульсный преобразователь угловых перемещений | 1975 |
|
SU954821A1 |
| Фотоэлектрический преобразователь перемещения в код | 1985 |
|
SU1292182A1 |
| Устройство для измерения перемещений объекта | 1984 |
|
SU1180694A1 |
Использование: измерительная техника, в делительных машинах, предназначенных для изготовления дифракционных решеток, Сущность изобретения: устройство содержит неподвижную и подвижную ча- сти с приводами грубого и точного перемещений, модулированный дифференциальный фотоэлектрический датчик перемещения, выполненный в виде двух источников света, измерительной и индикаторной шкал с нанесенными на них растровыми решетками >&л фотоприемника, причем измерительная и индикаторная шкалы соединены с неподвижной частями делительной машины соответственно, растроваярешетка нанесена на индикаторную шкалу в виде двух растров, сдвинутых один относительно другого на половину периода растра, а каждый источник света оптически сопряжен с фотоприемником через один из растров. Устройство также включает синхронный детектор и мультивибратор, причем первый выход мультивибратора соединен с первым источником света и управляющим входом синхронного детектора, второй выход - с вторым источником света, выход фотоприемника связан с входом привода грубых перемещений через последовательно соединенные детектор и блок отсчета перемещений с сигнальным входом синхронного детектора через ключ, управляющий вход которого связан с выходом блока отсчета перемещений. Сигнальный выход синхронного детектора связан с входом привода точных перемещений через введенные в устройство последовательно соединенные компаратор, накопитель, переключатель, RC-цепочку и сумматор, при этом управляющий вход переключателя подключен к выходу блока отсчета перемещений, а второй сигнальный вход его заземлен, второй вход сумматора связан с выходом синхронного детектора. 2 ил.слсV4VJСП^
21
V
гд.
Jv
| Фотоэлектрические преобразователи информации / Под ред | |||
| Л.Н, Преснухина, М.: Машиностроение, 1974, с | |||
| Нефтяная топка для комнатных печей | 1922 |
|
SU326A1 |
