1
Изобретение относится к станкостроительной и измерительной технике и может быть применено для высокоточных измерений угловых перемещений вала, а также для управления его позиционированием.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому является фазоимпульсный преобразователь угловых перемещений, содержащий корпус, основное растровое сопряжение, состоящее из связывающего с поворотным валом измерительного растра и связанного посредством пружин с корпусом преобразователя индикаторного раст- ра, электромагниты, осуществляющие сканирование индикаторного растра, круговой осветитель, установленный со стороны измерительного растра, противоположной расположению.индикаторного резистора О оптическую систему, установленную со стороны основного растрового сопряжения, противоположной расположению кругового осветителя, фотоприемник, установленный на выходе оптической системы и блок регистрации, соединенный входом с выходом фотоприемника i .
Недостатком изйестного преобразователя является невысокая точность преобразоваШ1я угловых перемещений.
Цель изобретения - увеличение точнооти преобразования угловых перемещений.
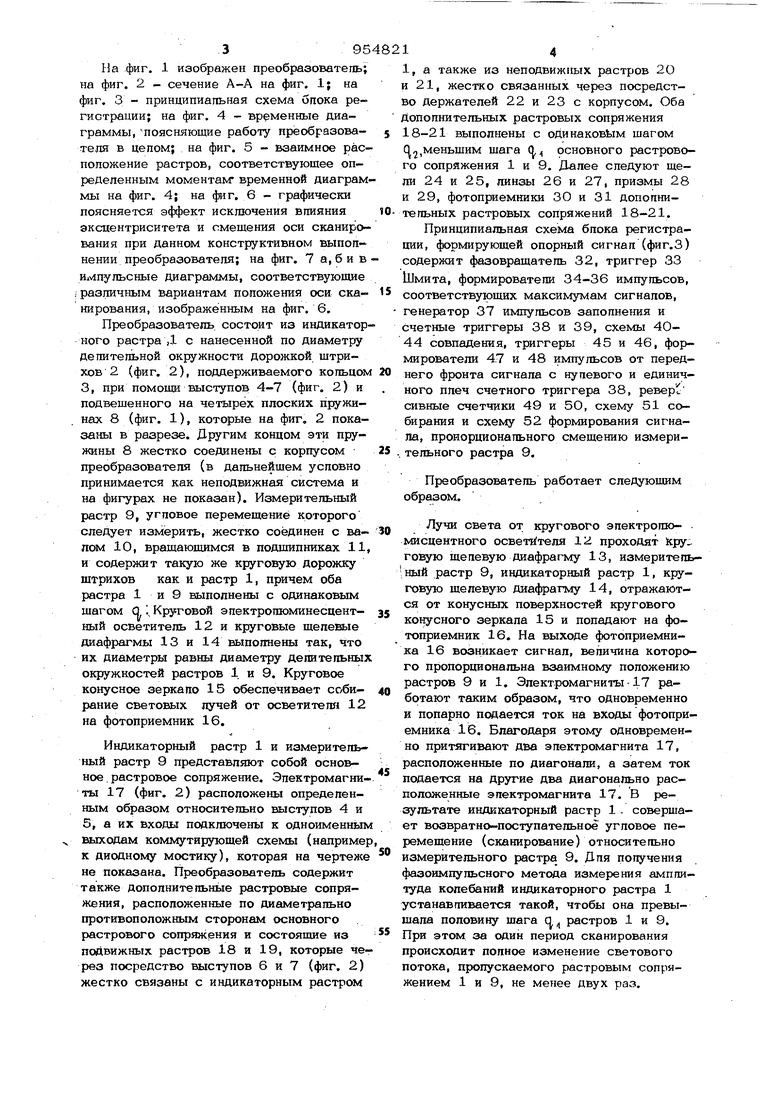
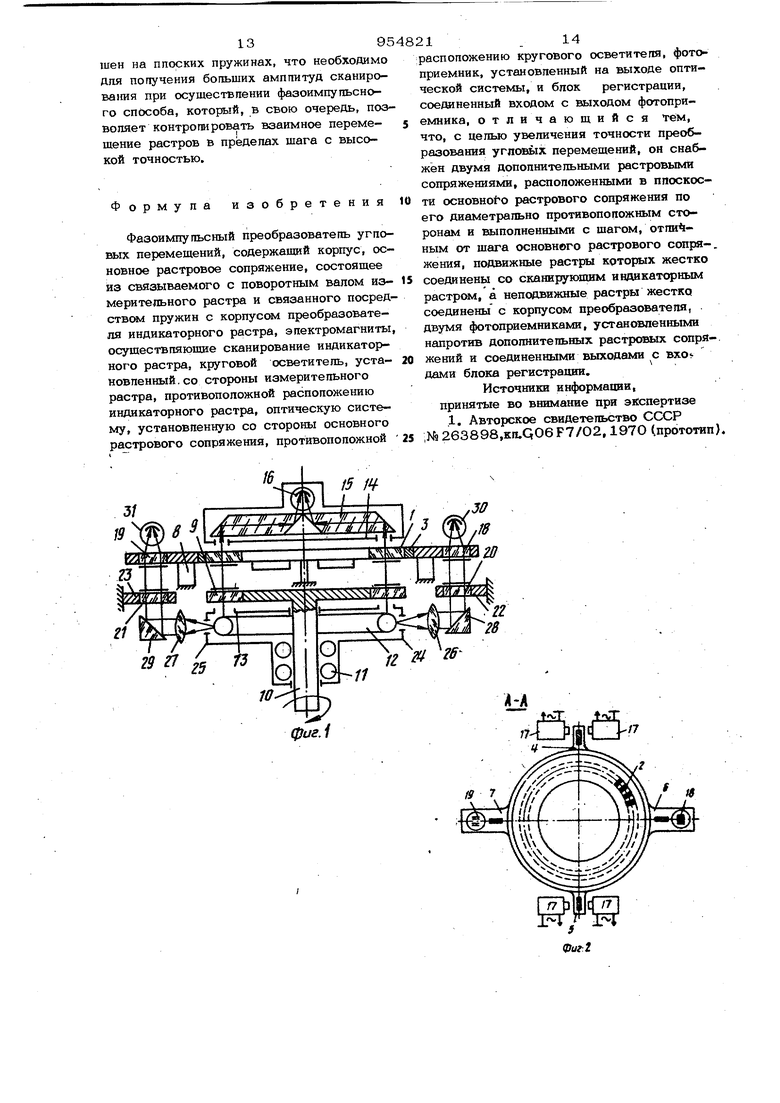
Указанная цель достигается тем, что преобразователь угловых перемещений снабжен двумя дополнительными растровыми сопряжениями,-расположенными в плоскости основного растрового сопряжения по его диаметрально противоположным сторонам и выполненными с щагом, отличным от щага основного растрового сопряжения, подвижные растры которых жестко соединены со сканирующим индикаторным растром, а неподвижные растры жестко соединены с корпусом преобразователя двумя фотоприемниками, установленными напротив дополнительных растровых сопряжений и соединенными выходами с .входами блока регистрации. 395 На фиг. 1 изображен преобразоватепоь; на фиг. 2 - сечение А-А на фиг. 1| на фиг. 3 - принципиальная схема опока регистрации; на фиг. 4 - временные диаграммы, поясняющие работу иреобразова-теля в цепом; на фиг. 5 - взаимное распопожение растров, соответствующее определенным моментам временной диаграм мы на фиг. 4; на фиг. 6 - графически поясняется эффект исключения впияния эксцентриситета и смешения оси сканирования при данном конструктивном выполнении преобразователя; на фиг. 7 а, б и в импульсные диаграммы, соответствующие .различным вариантам положения оси сканирования, изображенным на фиг. 6. Преобразователь, сострит из индикатор ного растра ,1 с нанесенной по диаметру депитегаьной окружности дорожкой штрихов 2 (фиг. 2), поддерживаемого кольцом 3, при помощи выступов 4-7 (фиг. 2) и подвешенного на четырех плоских пружинах 8 (фиг. 1), которые на фиг, 2 показаны в разрезе. Другим концом эти пружины 8 жестко соединены с корпусом преобразователя (в дальнейшем условно принимается как неподвижная система и на фигурах не показан). Измерительный растр 9, угловое перемещение которого следует измерить, жестко соединен с валом 10, вращающимся в подшипниках 11 и содержит такую же круговую дорожку штрихов как и растр 1, причем оба растра 1 и 9 выполнены с одинаковым шагом Q Жруговой электропюминесцентный осветитель 12 и круговые щелевые диафрагмы 13 и 14 выпот1ены так, что их диаметры равны диаметру делительных окружностей растров 1. и 9. Круговое конусное зеркапо 15 обеспечивает собиранне световых лучей от осветителя 12 на фотоприемник 16. Индикаторный растр 1 и измерительный растр 9 представляют собой основное растровое сопряжение. Электромагниты 17 (фиг. 2) расположены определенным образом относительно выступов 4 и 5, а их входы подключены к одноименным выходам коммутирующей схемы (наприме к диодному мостику), которая на чертеже
не показана. Преобразователь содержит также дополнительные растровые сопряжения, расположенные по диаметрально противоположным сторонам основного растрового сопряжения и состояыше из подвижных растров 18 и 19, которые через посредство выступов 6 и 7 (фиг. 2) жестко связаны с индикаторным растром
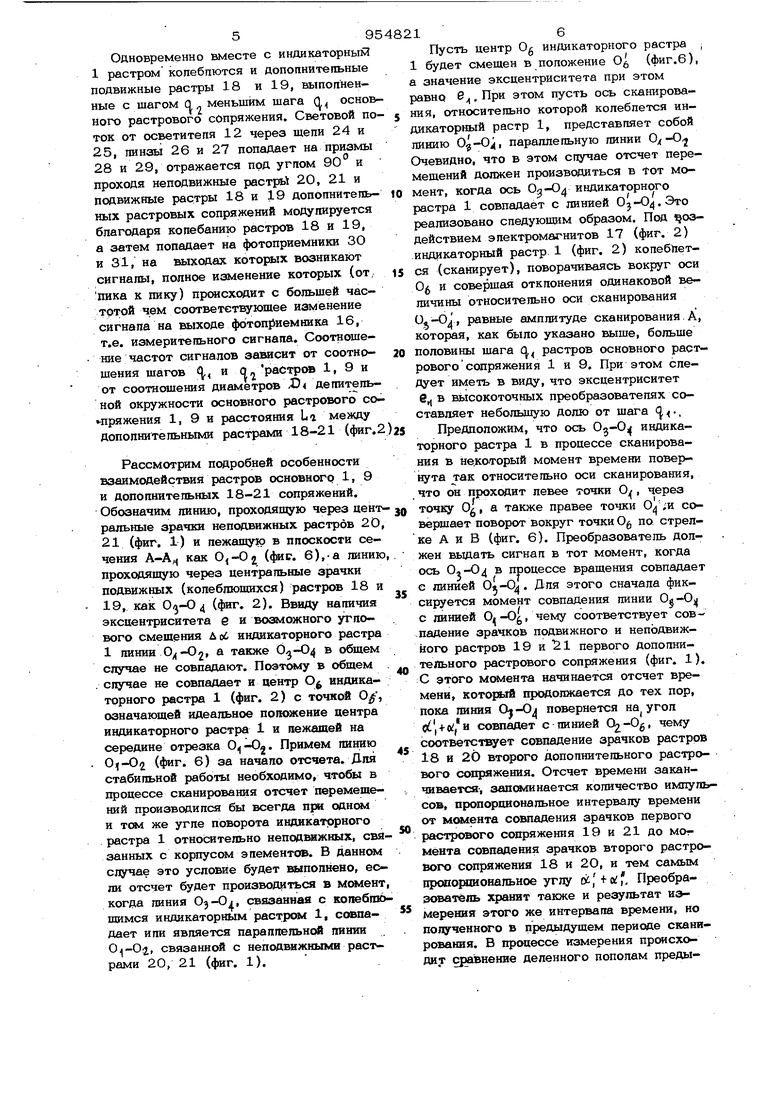
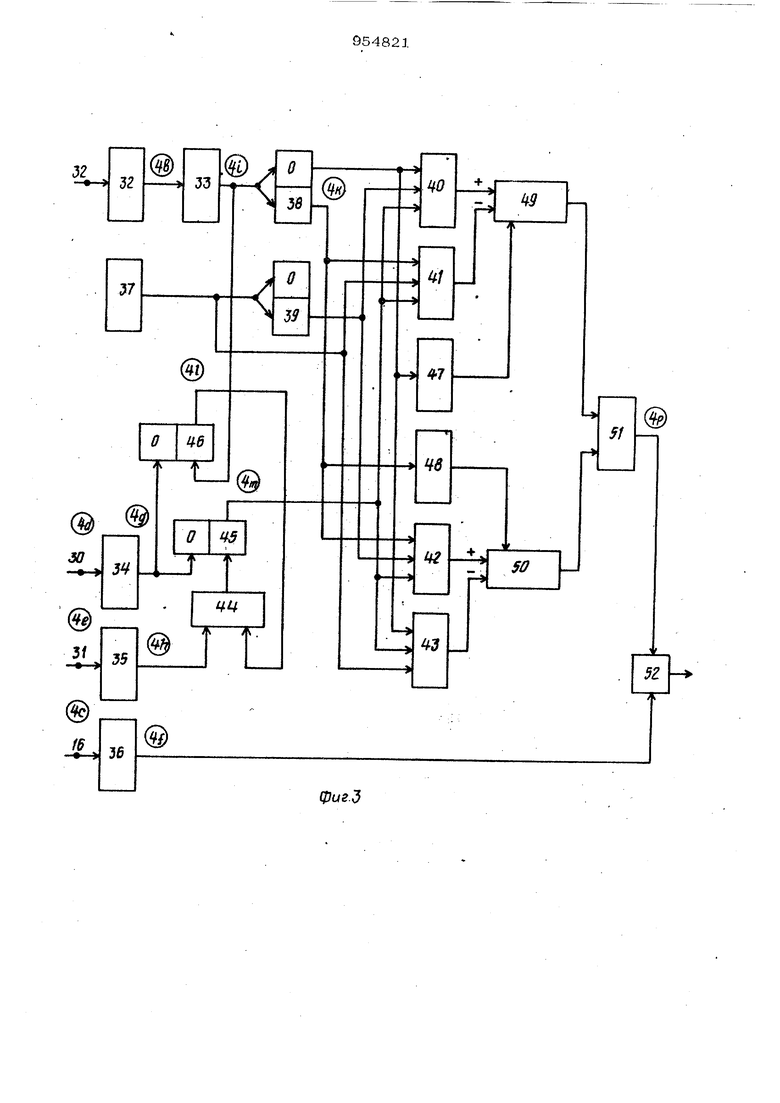
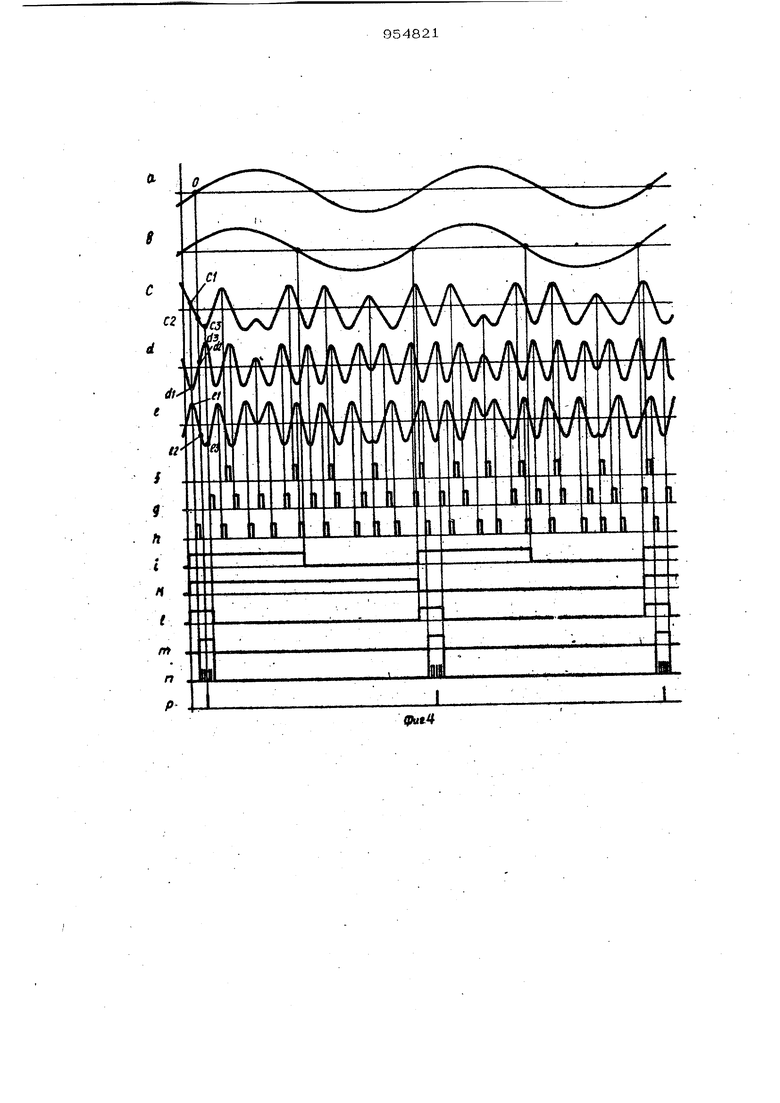
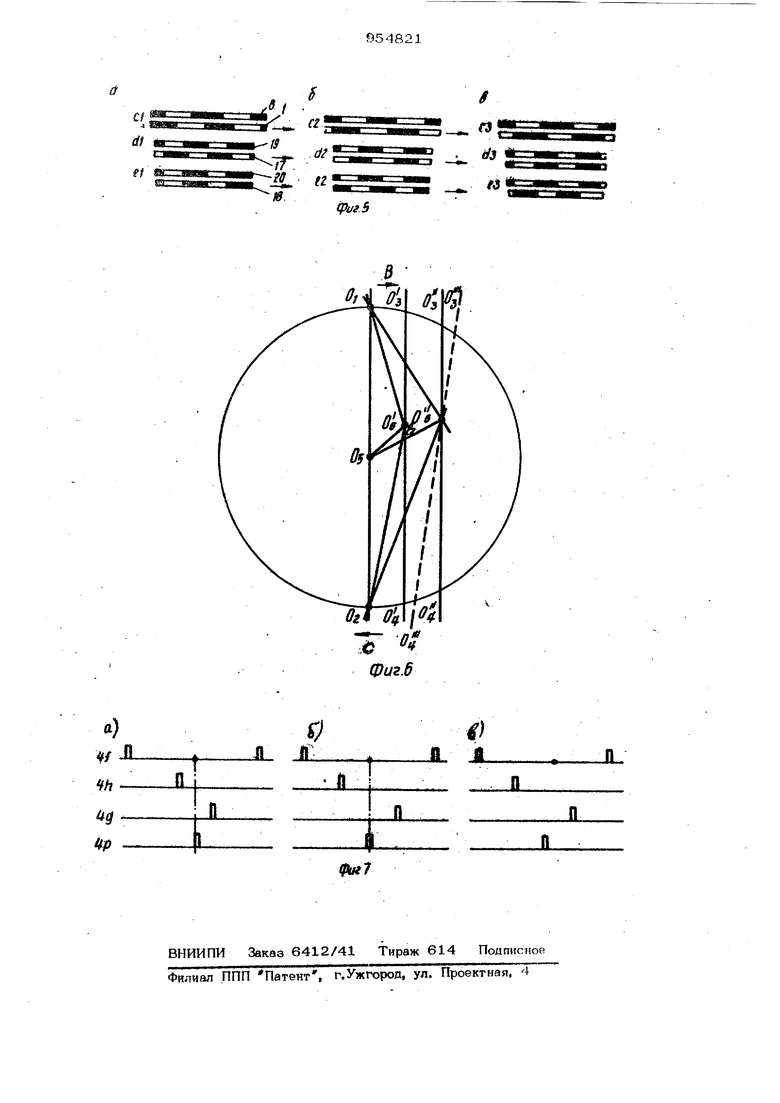
фазоимпульсного метода измерения амплитуда колебаний индикаторного растра 1 устанавливается такой, чтобы она превышала половину шага с растров 1 и 9. При этом за один период сканирования происходит полное изменение светового потока, пропускаемого растровым сопряжением 1 и 9, не менее двух раз. 1 1, а также из неподвижных растров 20 и 21, жестко связанных через посредство держателей 22 и 23 с корпусом. Оба дополнительных растровых сопряжения 18-21 выполнены с одинаковом шагом ,меньшим шага ( основного растрового сопряжения 1 и 9. Далее следуют щели 24 и 25, линзы 26 и 27, призмы 28 и 29, фотоприемники 30 и 31 дополните пьных растровых сопряжений 18-21. Принципиальная схема блока регистрации, формирующей опорный сигнал (фиг.З) содержит фазовращатель 32, триггер 33 Шмита, формирователи 34-36 импугаьсов. соответствующих максимумам сигналов. генератор 37 импульсов заполнения и счетные триггеры 38 и 39, схемы 4044 совпадения, триггеры 45 и 46, формирователи 47 и 48 импульсов от переднего фронта сигнала с нулевого и единичного плеч счетного триггера 38, реверс сивные счетчики 49 и 50, схему 51 собирания и схему 52 формирования сигнала, пропорционального смещению измерительного растра 9. Преобразователь работает следующим образом. Лучи света от кругового электропюмисцентного осветителя 12. проходят Жру, говую шепевую диафрагму 13, измеритегаЕ ;ный растр 9, индикаторный растр 1, круговую щелевую диафрагму 14, отражаются от конусных поверхностей кругового конусного зеркала 15 и попадают на фотоприемник 16. На выходе фотоприемника 16 возникает сигнал, величина которого пропорциональна взаимному положению растров 9 и 1, Электромагниты-17 работают таким образом, что одновременно и попарно подается ток на входы фотоприемника 16. Благодаря этому одновременно притягивают два электромагнита 17, расположенные по диагонали, а затем ток подается на другие два диагонально расположенные электромагнита 17. В результате индикаторный растр 1 - совершает возвратно-поступательное угловое перемещение (сканирование) относительно измерительного растра 9. Для получения 5 Одновременно вместе 1 растром колеблются и подвижные растры 18 и 19, выполненные с шагом Q . меньшим шага П основ ного растрового сопряжения. Световой по ток от осветителя 12 через щели 24 и 25, линзы 26 и 27 попадает на призмы 28 и 29, отражается поД углом 90° и проходя неподвижные pacrpbi 20, 21 и подвижные растры 18 и 19 дополнитепьшых растровых сопряжений модулируется благодаря колебанию растров 18 и 19, а затем попадает на фотоприемники 30 и 31, на выходах которых возникают сигналы, полное изменение которых (от, пика к пику) протсходит с большей частртой чем соответствующее изменение сигнала на выходе фотоприемника 16, т.е. измерительного сигнала. Соотношение частот сигналов зависит от соотношения шагов , и о „растров 1, 9 и г iS от соотношения диаметров ЛJ делительной окружности основного растрового со-пряжения 1, 9 и расстояния La между дополни те льньпvя растрами 18-21 (фиг. 2 Рассмотрим подробней особенности взаимодействия растров основного 1, 9 и дополнительных 18-21 сопряжений. Обозначим пинию, проходящую через центральные зрачки неподвижных растров 20, 21 (фиг. 1) и лежащую в плоскости сечения А-А, как (фис. 6),-а линию проходящую через центральные зрачки подвижных (колеблющихся) растров 18 и 19, как 4 (фиг. 2). Ввиду наличия эксцентриситета е и возможного утлового смещения Aoi индикаторного растра 1 линии 2, а также в общем случае не совпадают. Поэтому в общем . случае не совпадает и цантр О индикаторного растра 1 (фиг. 2) с точкой О/, означающей идеальное попЕожаниа центра индикаторного растра 1 и пежашай на середине отрезка . Примем пинию . Оц-О (фиг. 6) за начало отсчета. Дпя стабильной работы необходимо, чтобы в процессе сканирования отсчет перемещений производился бы всегда при окаам. и том же угле поворота индикаторного растра 1 относительно неподвижных, связанных с корпусом элементов. В данном случае это условие будет выполнено, если отсчет будет производиться в М(, когда линия , связанная с копебпю т . щимся индикаторным растром 1, совпадает или является параллепьнсЛ пииии , связанной с неподвижными растрами 20, 21 (фиг. 1). с индикаторнымиПусть центр Og индикаторного растра дополните 1ьные 9548216 1 будет смещен в положение 0 (фиг.6), а значение эксцентриситета при этом равно е. При этом пусть ось сканирова ИЯ относительно которой колеблется индикаторный растр 1, представляет собой линию , параллельную линии Ох-О Очевидно, что в этом случае отсчет перемещений должен производиться в тот момент, когда ось Оо-О индикаторного растра 1 совпадает с линией . Это реализовано следующим образом. Под ч оздействием электромагнитов 17 (фиг. 2) индикаторный растр. 1 (фиг. 2) колебйется (сканирует), поворачиваясь вокруг оси Об и совершая отклонения одинаковой величины относительно оси сканирования Pj-O, равные амплитуде сканирования. А, которая, как было указано выше, больше половины шага c растров основного растрового сопряжения 1 и 9. При этом следует иметь в виду, что эксцентриситет е,, в высокоточных преобразователях составляет небольшую долю от шага сз,. Предположим, что ось индикаторного растра 1 в процессе сканирования в некоторый момент времени повернута jraK относительно оси сканирования, что он проходит левее точки О, через TO4igr 0, а также правее точки 0 ;и совершает поворот вокруг точки 0 по стрелке А и В (фиг. 6). Преобразователь должен выдать сигнал в тот момент, когда ось О,-Од в процессе вращения совпадает с пинией . Для этого сначала фиксируется момент совпадения пинии Ол-О)| с линией О,-О, чему соответствует совпадение зрачков подвижного и непЬдвижного растров 19 и первого Дополнительного растрового сопряжения (фиг. 1), С этого мдалента начинается отсчет времени, который продолжается до тех пор, пока пиния Oj-O повернется ,,и совпадет с линией , чему соответствует совпадение зрачков растров 18 и 20 второго дополнительного растрового сопряжения. Отсчет времени закан швается, запоминается количество импупьсов, пропорциональное интервалу времени от момента совпадения зрачков первого растрового сопряжения 19 и 21 до мо Мента совпадения зрачков второго растрового сопряжения 18 и 20, и тем самым пропо1ншоналъное углу ci.,-f-olf. Преобразоватёпь хранит также и результат измарания этого же интервала времени, но получанного в предыдущем периоде сканирования. В npCHiacce измерения происходит сравнение деленного пополам предыдущег.о результата измерения, пропорционального углуоо о:/2,с текущим результатом. В момент равенства выдается опорный сигнал. Если в процессе работы экс. центриситет изменится и примет значение 2 а центр индикаторного растра 1 займет положение 0, причем ось сканирования останется параплепьной линии 0. -О то при сохранении процесса формирования опорного сигнала он будет выдаваться в момент, когда угол поворота |шнии , равен0 2 l i2/2,т.e. когда ось Ол -О 4 установится параллельно линии О, ОЕсли кроме эксцентриситета б -возникает угловое смешение Д об оси сканирования (фиг. 6) и она займет положение , то и в этом слзчае опорный сигнал будет выден, только в момент совпадения линии с , параллельной линии Oi-Ол. Это показывает, 1ка КИМ образом исключается влияние изменений эксцентрнсистета и неконтролируеЛ5ых угловых смещений оси сканирования Рассмотрим подробней работу схемы блока регистрации, . формирующей опорный сигнал. Чтобы сделать более наглядной связь этой схемы (фиг. 3) и отображающих ее работу временных диаграмм (фиг. 4), в определенных точках схемы нанесены кружки, в которых проставлены соответствующие этим точкам номера временных диаграмм. Закон движения индикаторного растра 1 (зависимость его углового перемещения от времени) изображен на фиг. 4а и представляет собой синусоиду. Условимся что отрицательные попупериоды этой синусоиды соответствуют отклонению растра 19 против стрелкиВ (фиг. 6) и отклонению растра 18 щзотив стрелки В от оси сканирования положительным попупериодам соответствует перемещение в обратную сторону. При этом значение эксцентриситета пусгь будет в вл Момент перехойв данки через ойь сканирования .д, согласно определению, соответствует моменту перехода синусоиды (фиг. 4а) через нуль. Прилегающий с обеих сторон к нушо участок синусоиды является наиболее прямолинейным, поэтому с достаточной точностью можно принять, что соответствующие этому участку временные интервалы пропоршюнапьны угловому перемещению растjpoB. Вращению растров 19 я 18 по стрелке В и С в сторону оси сканирования Oj-0 соответствует отрицательный участок синусоиды в периоде сканирова91в HHHTj/.-f.npH совпадении пинии Oj-0(/ с линией 0(-00 совпадают зрачки растров 19 и 21 и пропускание растрового сопряжения достигает максимальной величины. Этому соответствует положение растров, обозначенное как е, на фиг. 4а. При этом сигнал на выходе фотоприемника 31 достигнет максимального значения. Неподвижный растр 20 и индикаторный 1 смещены относительно растров 18 и 9 (измерительный растр для данноЕ о рассмотрения условно принимается неподвижным) соответственно рисункам, обозна- ченным как d и 9 (фиг. 5а). При этом значения сигналов на выходах фотоприемников 81 и 30 соответствуют точкам е сЗ и с 4 на фиг. 4е, d и с соответственно (эти сигналы изображены без учета постоянной составляющей) Положение растров e2,d2 и Са (ir. 56), а также значения сигналов в точках 62, d2 и Сд (фиг. 4е, и с) соответствуют моменту, когда линия совпадает с осью сканирования (фиг. 6). При .дальнейшем перемещении растров по стрелкам соответственно В и С (фиг. 6) линии совпадает с линией Oj-oi и в то же время совпадают зрачки растров 18 и 20. Сигнал на выходе фотоприемника 30 достигнет максимума. Положение растров 63,3 3 изображено на 4иг, 5в, а значения сигналов соответствуют точкам и С;5 на фиг. 4е, и С соответственно. Колеблющийся индикаторный растр 1 х;рвершает попеременно отклонения на величину А по стрелке В и С и в обратную сторону. На выходе фотоприемников воз никают сложные сигналы, модулированные по частоте и по фазе. Причем частота зависит от соотношения величины А с величинами О и 2, а фаза меняется на 18О при достижении колеблющимся растром максимального отклонения от оси сканирования. Сигналы на выходах фотопртемников 16, 30 и 31 изображены на фиг.4с, и в и соответствуют соотношениям (3/4 « а также А - ,,,. Для упрощения рассуждений усповно принято, что D jvTbj. Для осуществления описанного выше принципа формирования опорного сигнала надо выделить максимум 6 сигнала 4 е (фиг. 4) и максимум da сигнала , находящиеся по обе стороны от точки перехода через нуль кривой 4а. Для этого на вход фазовращателя 32 (фиг. 3) подается переменное напряжение от источника, питающего коммутатор (диодный мостик), который управляет работой эпектромагнитов 17. С помощью фазовраша теля 32 это напряжение поворачивается на такой фазовый угол, чтобы переход через нупь сигнала 4 b на его выходе предшествовал возникновению максимума € сигнала 4 . G помощью триггера 33 Шмита формируется сигнал 4J, а с помо щью формирователей 36, 35 и 34, входы которых соединены с выходами фото-- приемников 16, 31 и 30 соответственно формируются импульсы 4, 4h и 4п при достижении этими сигналами своих максимальных значений. Передним - фронтом сигнала 4 i запускается триггер 46 (фиг. 4и), который соединен с входом схемы 44 совпадения и подготавливает срабатыванию -триггер 45. Первый импупьс 4h (после срабатывания триггера 46) с выхода формирователя 35 через схему 44 совпадения запускает триггер 45 (фиг. 4т), который гасится одновре менно с триггером 46 импульсом 4 с выхода формирователя 34. Как видно по временной диаграмме, длительность импульса 4 уп соответствует интервалу Bpeмени между максимумами е и d лов 4в и 4(. Триггер 45 подготавливает к работе схемы 40-43 совпадения. Импупьсы 4 i с выхода триггера Шмита 34 поступают также на счетный триггер 38 на единичном выходе которого формирует ся сигнал 4 . Этот сигнал подается на формирователь 48, формирующий импульсы от переднего фронта (не показано), которые устанавливают реверсивный счет ник 50 Вт нуль. Единичный ныход триггера 38 подключен также ко входу схемы 42 совпадения, другой вход которой соединен с выходом счетного триггера 39, который в свою очередь соединен с выходом генератора 37 импульсов заполнения. Выход схемы 42 совпадения соединен с входом сложения реверсивного счетчика 5О. Поэтому в период сканирования Т( (фиг. 4q) этот счетчик считает импульсы (фиг. 4п), частота которых вдвое меньше, чем частота генератора 37, и таким образом запоминает число импульсов, пропорциональное половине интервала, соответствующего длительное- ти импульса 4т и равноеt,,( как уже показано выше. Поскольку вход сложения реверсивного счетчика 49 управляется через схему 4О совпадения от нулевого плеча счет ного триггера 38, а другой ее вход сое- динен с единичньп плечом счетного триггера 39, причем сброс в нуль счетчика сигна 49 производится от формирователя 47, соединенного тоже с нулевьпи ппечом счетного триггера 38, то это означает, что в период сканирования Tj.,j. предшествующий периоду счетчик 49 работал на сложение и к началу периода Ту, в нем содержится число, пропорциональное интервалу . В период Т ( открывается схема 41 совпадения, управляющая вычитанием, соединенная с единичным плечом счетного триггера 38, другой вхо/1 которой подключен прямо к выходу генератора 37 Поэ-шму в спучае вычитания на счетчик поступает в два раза больше импульсов за время, определяемое сигналом 4 вд , чем за этот же интервал времен при сложении. Следовательно, по истечении времени1 +Ц/2 содержание счетчика 49 будет равным нулю и затем на его выходе возникает сигнал займа, который поступает на вход схемы 51 сборки и передний фронт которого соот ветствует опорному импульсу. По истечении периода Tj реверсивный счетчик 4 у гасится и при срабатывании триггера 45 в периоде сканирования j,. через схему 40 совпадения на его вход сложения начинают поступатг -fMnynbCbi с выхода счетного триггера 39 и он запоминает число. пропорционапьное Vi/2 в то время через схему 43 совпадения открывается вычитакнций вход счетчика 5О и при истечении времени ti-vt,/2 он вьщает сигнал займа на схему 51 сборки. Затем цикл повторяется. Таким образом, счетчик 49 и 50выдает сигнал займа через один период сканирования, а на выходе схемы 51сборки возникают сигналы за каждый период сканирован{1Я (фиг. 4 ). Эти сигналы поступают на вход схемы 52, формирующей сигнал, пропорциональный смещению измерительного растра 1, на другой вход которой подаются импульсы 4f jc выхода формирователя 36. Из -всей последовательности импульсов 4f имеют значение только те, которые определяют интервал времени t t пропорциональный щагу с (фиг, 4i) и включающий опорный импульс 4р. При смешении измерительного растра 9 (фиг. 1) относительно индикаторного растра 1 смещаются также импульсы 4 f относительно опорного импульса 4 пропорционально угловому смещению растра 9, что выражается изменением соотношения интервалов времени i, иi4 ((JMr, 4f), а это означает, что эти интервалы -могут быть использованы как мера перемещения. В данном
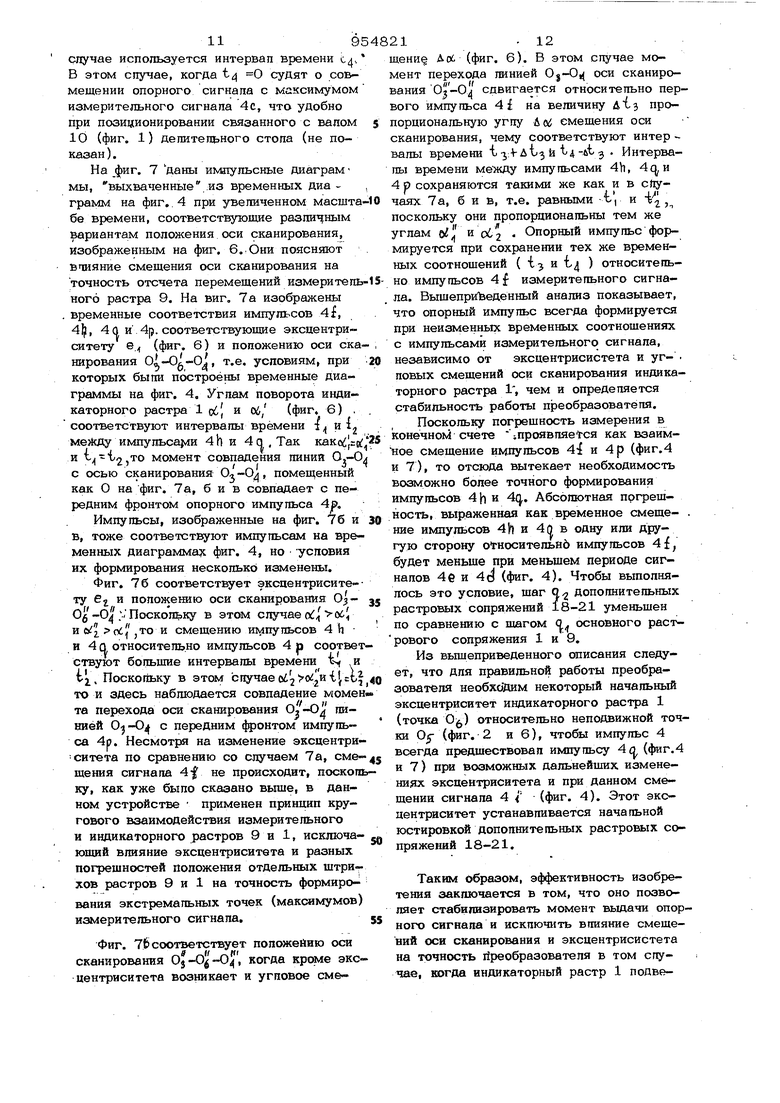
случае используется интервал времени сд. В этом спучае, когда t 0 судят о совмещении опорного сигнала с максимумом измерительного сигнала 4с, что удобно при позиционировании связанного с валом 10 (фиг. 1) делительного стопа (не показан ).
На фиг. 7 даны импульсные диаграм мы, выхваченные .из временных диа грамм на фиг, .4 при увеличенном масштабе времени, соответствующие различным вариантам положения оси сканирования, изображенным на фиг. 6.,Они поясняют втияние смещения оси сканирования на точность отсчета перемещений измеритепьного растра 9. На виг, 7а изображены временные соответствия импульсов 4f, 4, 4 о и 4р. соответствующие эксцентриситету е. (фиг. 6) и положению оси ска нирования Ol-Ol-OJ, т.е. условиям, при которых были построены временные диаграммы на фиг. 4. Углам поворота индикаторного растра 1 oij и (и/ (фиг. 6) , соответствуют интервалы времени -1 и i между импут са1 1и 4h и 4а ,Так и ,TO момент совпадения линия О.-О/ с осью сканирования oJ -О, помещенный как О на фиг. Та, бив совпадает с передним фронтом опорного импульса 4р,
Импупьсы, изображенные на фиг. 76 и в, тоже соответствуют импульсам на временных диаграммах фиг. 4, но условия их формирования несколько изменень.
Фиг. 76 соответствует эксдентрисите-ту GI VI положению оси сканирования ./ Поскольку в этом случае сх;{ об и esifj о ,то и смещению иктульсов 4Ь и 4 о относительно импульсов 4 ja соответствуют бопьщие интервалы времени и
t. Поскольку в этом спучаеЫ2 2 f tT, то и здесь наблюдается совпадение момен та перехода оси сканирования of-O х линией O-f-Gjf с передним 455ОНтом импульса 4р. Несмотря на изменение эксцентриситета по сравнению со случаем 7а, смешения сигнала 4f не происходит, поскольку, как уже было сказано вьпие, в данном устройстве применен принцип кругового взаимодействия измерительного и индикаторного растров 9 и 1, исключающий влияние эксцентриситета и разных погрешностей положения отдельных штрихов растров 9 и 1 на точность формирования экстремальных точек (максимумов) измерительного сигнала.
Фиг. 76 соответствует положейню оси сканирования , когда креме экс центриситета возникает и угловое смещени§ Aot (фиг. 6). В этом случае момент перехода гшнией Oj-O оси сканирования 0|-0л сдвигается относительно первого импупьса 4f на величину д1э пропорциональную угпу Аой смещения оси сканирования, чему соответствуют интер валы времени г т, и . з Интервалы времени между импульсами 41i, 4q,H 4 р сохраняются такими же как и в cftyчаях 7а, бив, т.е. равными -1, и V , поскольку они пропорциональны тем же углам и Опорный импульс формируется при сохранении тех же временных соотношений ( i и {-д ) относительно импупьсов 4 f- измерительного сигна. ла. Вышеприведенный анализ показывает, что опорный импульс всегда формируется при неизменных временных соотношениях с импульсами измерительного сигнала, независимо от эксцентрисистета и угловых смещений оси сканирования индикаторного растра 1, чем и определяется стабильность работы преобразователя.
Поскольку погрешность измерения в конечном счете проявляется как взаимное смещение импульсов 4: и 4р (фиг.4 И 7), то отсюда вытекает необходимость возможно более точного формирования импульсов 4h и 4(. Абсолютная погрешность, выраженная как временное смещение импульсов 4У) и 4о в одну или другую сторону оТносительнб импульсов 4 i, будет меньше при меньшем периоде сигналов 4е и 4(3 (фиг. 4). Чтобы выполнялось это условие, шаг 0 дополнительных растровых сопряжений 18-21 уменьшен по сравнению с шагом о. основного растрового сопряжения 1 и 9.
Из вьпиеприведенного описания следует, что для правильной работы преобразователя необходим некоторый начальный эксцентриситет индикаторного растра 1 (точка 0) относительно неподвижной точки 05- (фиг. 2 и 6), чтобы импульс 4 всегда предшествовал импульсу 4 о (фиг.4 и 7) при возможных дальнейших изменениях эксцентриситета и при данном смещении сигнала 4 (фиг. 4). Этот эксцентриситет устанавливается начальной юстировкой дополнительных растровых сопряжений 18-21.
Таким образом, эффективность изобретения заключается в том, что оно позволяет стабилизировать момент выдачи опорного сигнала и исключить влияние смещений оси сканирования и эксцентрисистета на точность йреобразователя в том случае, когда индикаторный растр 1 подве1395шен на ппоских пружинах, что необходимо Дня попучения больших амплитуд сканирова1шя при осуществлении фазоимпульсного способа, который, в свою очередь, позволяет контролировать взаимное перемещение растров в пределах шага с высокой точностью. Формула изобретения Фазоимпупьсный преобразователь угловых перемещений, содержащий корпус, основное растровое сопряжение, состоящее из связываемого с поворотным валом измерительного растра и связанного посредствсял пружин с корпусом преобразователя индикаторного растра, электромагниты, осуществляющие сканирование индикаторного растра, круговой осветитель, установленный. со стороны измерительного растра, противоположной расположению индикаторного растра, оптическую систему, установленную со стороны основного растрового сопряжения, противоположной
фиг.1 21.14 расположению кругового осветитепя, фотоприемник, установленный на выходе оптической системы, и бпок регистрации, соединенный входом с выходом фотоприемника, отличающийся тем, что, с целью увеличения точности преобразования yrnoBbix перемещений, он снабжен двумя дополнительными растровыми сопряжениями, расположенными в ппоскости ocнoвнo o растрового сопряжения по его диаметрально противоположным сторонам и выполненными с шагом, отли 1ным от шага основного растрового сопря-. жения, подвижные растры которых жестко соединены со сканирующим индикаторным растром, а неподвижные растры жестко соединены с корпусом преобразователя, . двумя фотоприемниками, установленными напротив дополнительных растровых сопряжений и соединенными выходами с BxOs дами блока регистрации, Источники информации, принятые во внимание при эв:спертизе .1. Авторсжое свидетельство СССР ,№ 263898,Kn.Q06F7/02,1970 (прототип).
а

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ центрирования двух независимо вращающихся круговых растров | 1990 |
|
SU1747884A1 |
| Фотоэлектрический преобразователь угловых перемещений | 1977 |
|
SU696280A1 |
| Эталон единицы плоского угла | 2016 |
|
RU2637727C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА В ПОСЛЕДОВАТЕЛЬНОСТЬ ИМПУЛЬСОВ | 1991 |
|
RU2025043C1 |
| Фотоэлектрический преобразователь угловых перемещений | 1974 |
|
SU629443A1 |
| Фотоэлектрический преобразователь перемещения в код | 1989 |
|
SU1676102A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2091708C1 |
| Способ измерения перемещений | 1973 |
|
SU486216A1 |
| РАСТРОВЫЙ ПРЕОБРАЗОВАТЕЛЬ «ПЕРЕМЕЩЕНИЕ — ФАЗА — НАПРЯЖЕНИЕ» | 1973 |
|
SU393760A1 |
| Фотоэлектрический преобразователь перемещений | 1980 |
|
SU1089411A2 |
JL
Л1
JL
JL
JL
JL
