Изобретение относится к автоматике, измерительной технике и может быть использовано в информационно-измерительных системах промышленных роботов.
Целью изобретения является повышение точности преобразователя угол-код при преобразовании малых углов, а также его упрощение.
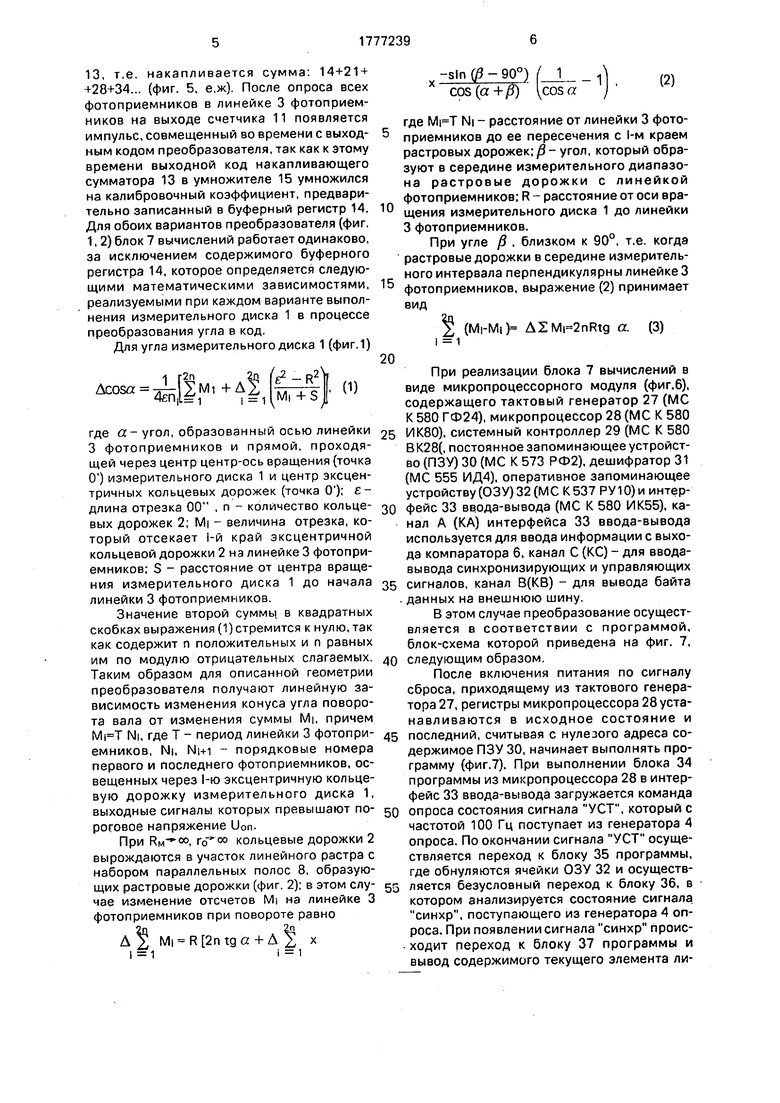
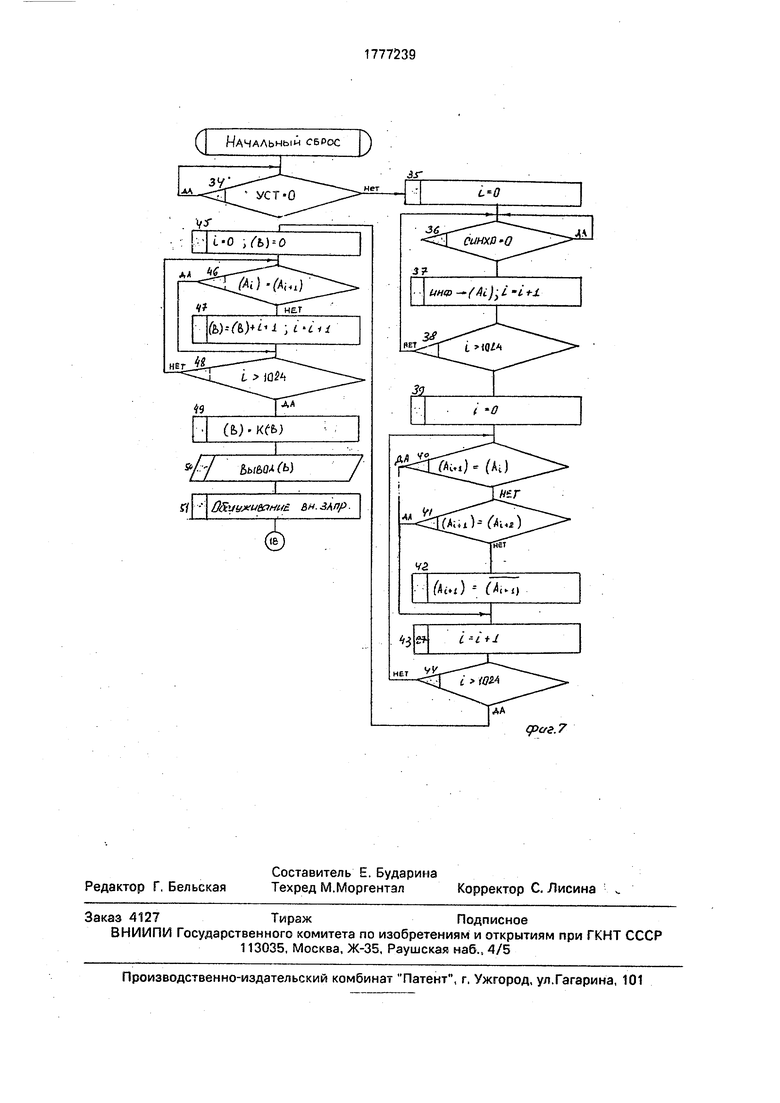
На фиг.1 приведена функциональная схема преобразователя угол-код; на фиг. 2 - пример выполнения измерительного диска в виде линейного растра и его расположение относительно линейки фотоприемников; на фиг. 3 - функциональная схема блока вычислений; на фиг. А - схема медианного фильтра и устройства выборки и хранения для трех элементов дискретной двоичной последовательности; на фиг. 5 - временные диаграммы, поясняющие работу блока вычислений; на фиг. 6 - пример реализации блока вычислений в виде микропроцессорного модуля; на фиг, 7 - схема программы получения выходного кода при выполнении блока вычислений в виде микропроцессорного модуля.
Преобразователь угол-код содержит осветительный блок (не показан), измерительный диск 1 (на фиг. 1 изображен его фрагмент) с эксцентричными кольцевыми дорожками 2, линейку 3 фотоприемников, генератор 4 опроса, усилитель 5, компаратор 6, блок 7 вычислений. При выполнении измерительного диска 1 в виде линейного растра (фиг.2) он имеет прямые параллельные полосы 8. Блок 7 вычислений содержит медианный фильтр 9, устройство 10 выборки и хранения (УВХ), счетчик 11, формирова- тель 12 импульсов, накапливающий сумматор 13, буферный регистр .умножитель 15. При медианной фильтрации дискретной двоичной последовательности, состоящей из трех элементов, медианный филыр 9 и устройство 10 выборки и хранения (фиг.4} могут быть реализованы на триггерах 16-18. элементах 19, 20 ИСКЛЮЧАЮЩЕЕ ИЛИ, элементах 21-23 И, элементе 24 НЕ.
Преобразователь работает следующим образом,
Импульс начала цикла опроса линейки 3 фотоприемников (фиг.5, а) поступает с генератора 4 опроса на установочный вход блока 7 вычислений и обнуляет счетчик 11 и накапливающий сумматор 13. При вращение измерительного диска 1 оптический сигнал осветительного блока, промодули- роаанный эксцентричными кольцевыми дорожками 2, попадает на фоточувствитель- ньге элементы линейки 3 фотоприемников. Сигналы опроса, поступающие из генератора 4 опроса на входы линейки 3 фотоприемников, приводят к появлению на ее выходе последовательности информационных сигналов, пропорциональных энергии засветки
элементов линейки 3. Текущие выходные сигналы линейки 3 фотоприемников усиливаются усилителем 5 и далее в компараторе 6 сравниваются с опорным напряжением Don. В результате на выходе компаратора 6
0 формируются логические сигналы, образующие дискретную последовательность, поступающую в блок 7 вычислений.
В блоке 7 вычислений синхронизирующими импульсами, поступающими на
5 тактовый вход медианного фильтра 9, информация с выхода компаратора б записывается в триггер 16, а содержимое триггеров 16-18 сдвигается на один размер вправо. При каждом сдвиге элементы 19, 20 ИСК0 ЛЮЧАЮЩЕЕ ИЛИ сравнивают информацию триггера 17 соответственно с информацией в триггерах 16, 18. Если информация в триггере 17 не равна одновременно информации в триггерах 16, 18, то на
5 выходе одного из элементов 22,23 И формируется сигнал, инвертирующий состояние триггера 17, Если состояние триггера 17 совпадает с состоянием хотя бы одного из триггеров 16, 18, то оно не изменяется.
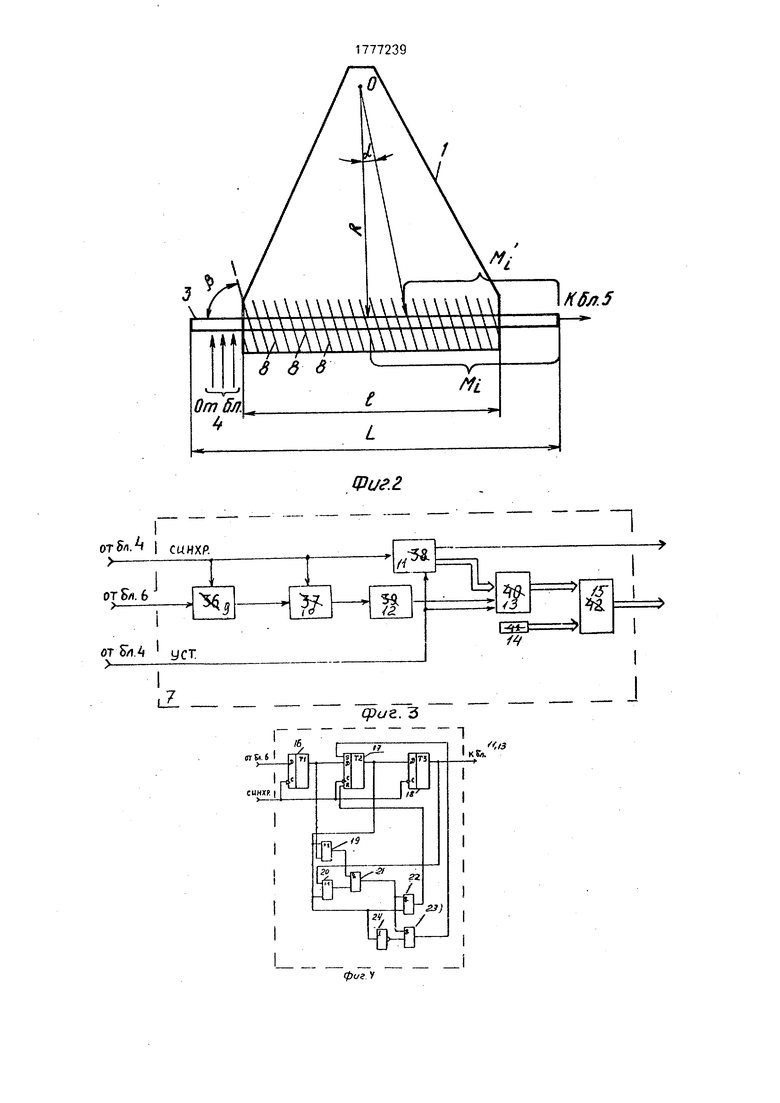
0 Таким образом, по каждому синхронизирующему импульсу (фиг. 5,6) в триггер 16 записывается очередной элемент дискретной последовательности, сформированный компаратором 6 (фиг. 5,в), Медианный
5 фильтр 9 и УВХ 10 совместно подавляют помехи, длительность которых не превышает половину ширины окна, т.е. в конкретном исполнении исправляют одиночные ложные сигналы во входной последовательности,
0 появляющиеся на выходе дефектных фотоприемников. Ложными сигналами, например, являются сигнал 25 логической единицы и сигнал 26 логического нуля (фиг. 5, в). На выходе триггера 18 выделяется оги5 бающая (фиг. 5, д) отфильтрованной входной дискретной последовательности (фиг. 5,г), данный сигнал получается на вьходе триггера 18(фиг.4). По перепадам выходного сигнала триггера 18 в формирователе 12
0 импульсов получаются короткие импучьсы (фиг, 5,е), которые поступают на тактовый вход накапливающего сумматора 13. В счетчике 11 хранится число импульсов, поступивших на синхронизирующий входбло5 ка 7 вычислений с начала опроса линейки 3 фотоприемников, поэтому при появлении короткого импульса нг тактовом входе накапливающего сумматора 13 происходит суммирование содержимого счетчика 11с содержимым накапливающего сумматора
13, т.е. накапливается сумма: 14+21 + +28+34... (фиг. 5, е,ж). После опроса всех фотоприемников в линейке 3 фотоприемников на выходе счетчика 11 появляется импульс, совмещенный во времени с выходным кодом преобразователя, так как к этому времени выходной код накапливающего сумматора 13 в умножителе 15 умножился на калибровочный коэффициент, предварительно записанный в буферный регистр 14. Для обоих вариантов преобразователя (фиг. 1,2) блок 7 вычислений работает одинаково, за исключением содержимого буферного регистра 14, которое определяется следующими математическими зависимостями, реализуемыми при каждом варианте выполнения измерительного диска 1 в процессе преобразования угла в код.
Для угла измерительного диска 1 (фиг.1)
1
cos a
(2)
где NI - расстояние от линейки 3 фото- приемников до ее пересечения с l-м краем растровых дорожек: /3 - угол, который образуют в середине измерительного диапазона растровые дорожки с линейкой фотоприемников; R - расстояние от оси вра- щения измерительного диска 1 до линейки 3 фотоприемников.
При угле fi . близком к 90°, т.е. когда растровые дорожки в середине измерительного интервала перпендикулярны линейке 3 фотоприемников, выражение (2) принимает вид
S
i 1
(Mi-Mi) A2Mr2nRtg a. (3)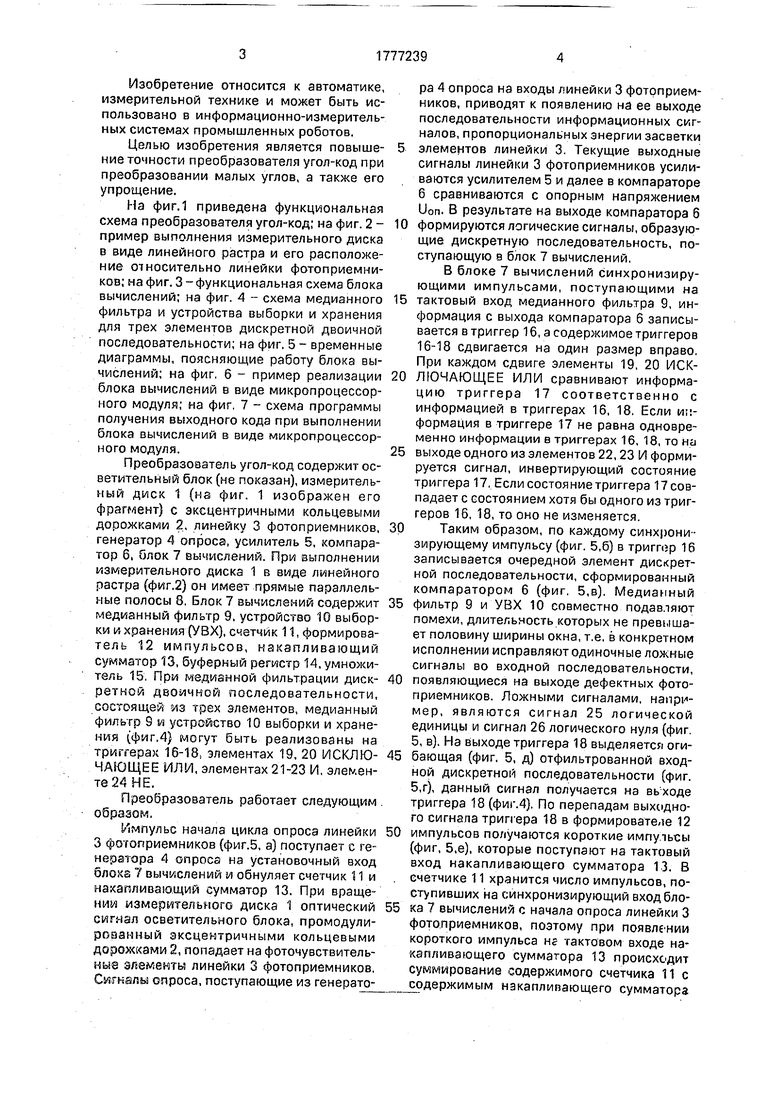

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1987 |
|
SU1783611A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1327291A1 |
| Устройство для измерения диаметра изделий | 1987 |
|
SU1730537A1 |
| Преобразователь перемещения в код | 1985 |
|
SU1429320A1 |
| Преобразователь перемещения в код | 1985 |
|
SU1295517A1 |
| Способ измерения геометрических размеров прозрачных труб | 1989 |
|
SU1753269A1 |
| Преобразователь перемещения в код | 1984 |
|
SU1197076A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАМЕТРОВ ИЗДЕЛИЙ | 1989 |
|
RU2042110C1 |
| Фотоэлектрический преобразователь перемещения в код | 1985 |
|
SU1316086A1 |
| Преобразователь перемещения в код | 1983 |
|
SU1128279A1 |
Изобретение относится к автоматике, измерительной технике и может быть использовано в информационно-измерительных системах промышленных роботов. Целью изобретения является повышение точности преобразователя угол-код при преобразовании малых углов, а также его упрощение. Для увеличения точности в преобразователь, содержащий измерительный диск 1 с эксцентричными кольцевыми дорожками 2, линейку 3 фотоприемников, генератор 4 опроса, усилитель 5, компаратор L 6. введен блок 7 вычислений, а измерительный диск выполнен таким образом, что разность максимального Rm и минимального г0 радиусов эксцентричных дорожек 2 измерительного диска 1 меньше длины L линейки 3 фотоприемников, при этом . Центр вращения измерительного диска 1 расположен на пересечении линии, являющейся продолжением линейки 3 фотоприемников и эксцентричной дорожки 2 радиуса (Rm+r0)/2. Для упрощения преобразователя измерительный диск 1 выполнен в виде линейного растра, центр вращения которого находится на перпендикуляре из центра линейки 3 фотоприемников, причем параллельные дорожки линейного растра расположены под углом / 0 к линейке 3 фотоприемников, а длина I линейного растра меньше длины L линейки 3 фотоприемников. В. процессе работы осуществляется медианная фильтрация дискретной последовательности, сформированной компаратором 6. 1 э.п. ф- лы, 7 ил. (Л С
Дсоза
1 v.
Mi
где а- угол, образованный осью линейки 3 фотоприемников и прямой, проходящей через центр центр-ось вращения (точка О ) измерительного диска 1 и центр эксцентричных кольцевых дорожек (точка О ); Ј длина отрезка 00 , п - количество кольцевых дорожек 2; MI - величина отрезка, который отсекает 1-й край эксцентричной кольцевой дорожки 2 на линейке 3 фотоприемников; S - расстояние от центра вращения измерительного диска 1 до начала линейки 3 фотоприемников.
Значение второй суммы, в квадратных скобках выражения (1) стремится к нулю, так как содержит п положительных и п равных им по модулю отрицательных слагаемых. Таким образом для описанной геометрии преобразователя получают линейную зависимость изменения конуса угла поворота вала от изменения суммы MI, причем NI, где Т - период линейки 3 фотоприемников, NI, NI+I - порядковые номера первого и последнего фотоприемников, освещенных через l-ю эксцентричную кольцевую дорожку измерительного диска 1, выходные сигналы которых превышают пороговое напряжение DonПри , кольцевые дорожки 2 вырождаются в участок линейного растра с набором параллельных полос 8, образующих растровые дорожки (фиг. 2); в этом случае изменение отсчетов Mi на линейке 3 фотоприемников при повороте равно
А У Mi R 2n tg а + Д § х
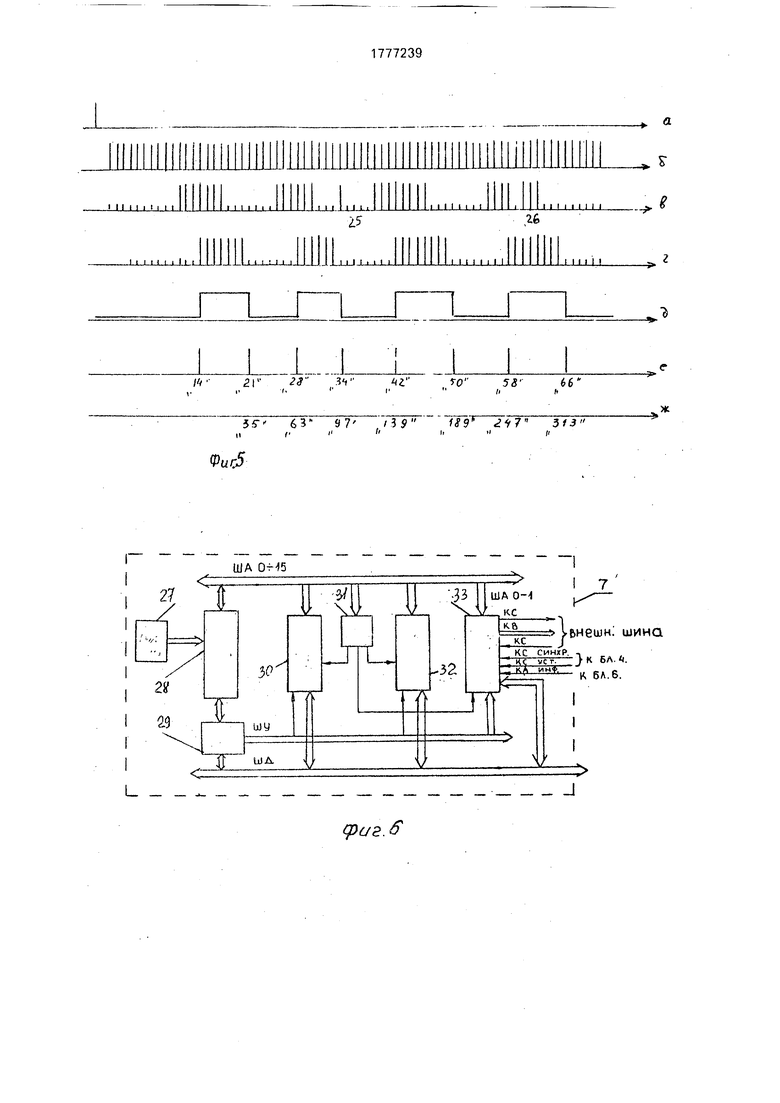
При реализации блока 7 вычислений в виде микропроцессорного модуля (фиг.6), содержащего тактовый генератор 27 (МС К 580 ГФ24), микропроцессор 28 (МС К 580
25 ИК80), системный контроллер 29 (МС К 580 ВК28(, постоянное запоминающее устройство (ПЗУ) 30 (МС К 573 РФ2), дешифратор 31 (МС 555 ИД4), оперативное запоминающее устройству (ОЗУ) 32 (МС К 537 РУ10)и интер30 Фейс 33 ввода-вывода (МС К 580 ИК55), канал А (КА) интерфейса 33 ввода-вывода используется для ввода информации с выхода компаратора 6, канал С (КС) - для ввода- вывода синхронизирующих и управляющих
35 сигналов, канал В(КВ) - для вывода байта . данных на внешнюю шину.
В этом случае преобразование осуществляется в соответствии с программой, блок-схема которой приведена на фиг. 7,
40 следующим образом.
После включения питания по сигналу сброса, приходящему из тактового генератора 27, регистры микропроцессора 28устанавливаются в исходное состояние и
45 последний, считывая с нулезого адреса содержимое ПЗУ 30, начинает выполнять программу (фиг.7). При выполнении блока 34 программы из микропроцессора 28 в интерфейс 33 ввода-вывода загружается команда
50 опроса состояния сигнала УСТ, который с частотой 100 Гц поступает из генератора 4 опроса. По окончании сигнала УСТ осуществляется переход к блоку 35 программы, где обнуляются ячейки ОЗУ 32 и осуществ55 ляется безусловный переход к блоку 36, в котором анализируется состояние сигнала синхр, поступающего из генератора 4 опроса. При появлении сигнала синхр проис- ходит переход к блоку 37 программы и вывод содержимого текущего элемента линейки 3 фотоприемников, выходной сигнал последней усиливается усилителем 5 и далее в компараторе 6 сравнивается с опорным напряжением Uon, выход которого соединен с интерфейсом 33 ввода-вывода. Результат сравнения в блоке 37 программы записывается в последний разряд ячейки ОЗУ 32 с текущим адресом (состояние шины ИНФ интерфейса 33 ввода-вывода коммутируется с канала А (КА) соответствующей командой микропроцессора 28 на шину данных, записывается во внутренний регистр микропроцессора 28 и далее в ОЗУ 32), В результате циклического выполнения блоков 36 - 38 программы осуществляется ввод всех 1024 состояний выхода компаратора 6 в ячейки ОЗУ 32. Блоки 39-44 производят медианную фильтрацию введенного массива данных: содержимое ячейки AI+I сравнивается с соседними и, если оно не совпадает ни с одним из них, то значение Aj+i инвертируется (фиг.7, блок 42). В блоках 45-48 программы определяются переходы 1-0 и 0-1 в профильтрованном массиве (А|) данных, причем сумма номеров фотоприемников 1+1, сигналы с которых принадлежат оптическим переходам свет-тень, с соответствующим краем эксцентричных кольцевых дорожек 2 измерительного диска 1, накапливается в ячейке садресом В в ОЗУ 32 (фиг.7, блок 47). Полученная таким образом сумма после умножения на коэффициент пропорциональности в блоке 48 программы (фиг. 7) переписывается в канал В (KB) интерфейса 33 ввода-вывода, откуда передается во внешнюю шину (фиг. 7, блок 50), синхронно с внешним запросом и синхросигналом, формируемым в блоке 51 программы. Системный контроллер 29 в соответствии с командной информацией, поступающей из микропроцессора 28, формирует стандартные управляющие сигналы, поступающие в ПЗУ 30, ОЗУ 32, стробирует передачу данных из микропроцессора 28 (или в него). Порядок работы преобразователя для получения cos а (выражение (1), фиг.1) аналогичен и при получении tg «(выражение (3), фиг.2) за исключением величины калибровочного коэффициента К (фиг.7, блок 49). Дешифратор 31 в соответствии с адресом, задаваемым из микропроцессора 28, инициирует тот из элементов блока 7 вычислений (ОЗУ 32, ПЗУ 30 или интерфейс 33 ввода-вывода), который в данный момент обменивается данными с микропроцессором 28.
Медианная фильтрация необходима только в случае использования линеек 3 фотоприемников с дефектными элементами; в противном случае она может быть вообще исключена из алгоритма обработки или использована с целью повышения надежности преобразования за счет обеспечения возможности получения достоверной информации при выходе из строя отдельных фотоприемников линейки 3 в процессе эксплуатации.
Формула изобретения
преобразователя, измерительный диск выполнен в виде линейного растра, длина I которого меньше длины L линейки фотоприемников, а центр вращения расположен
на перпендикуляре к продольной оси линейки фотоприемников, проходящем через ее центр, причем параллельные дорожки линейного растра расположены под углом /3 0 к продольной оси линейки
фотоприемников.
Kfa5
Фиг2
шшиишшшшшшши
I 1 I I I I
-i 111 n 11 LI
ИННIlllllIlllllll
/// 2i гз 1ч 4г
i /.
$T 63 97 il9
L.
фиг.б
s
g
15
ге
I 111111,1
0 58 66
1S9 JV7 313
IrII
ж
J
фаг.7
| Фотоэлектрический преобразователь угла поворота вала в код | 1984 |
|
SU1169166A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Авторское свидетельство СССР Мг 13277291, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
