Изобретение относится к электротехнике и предназначено для автоматического ре- гулированиянапряженияна
электростанциях и подстанциях с синхронными компенсаторами.
Известен способ, обеспечивающий поддержание напряжения на шинах электростанции и автоматического распределения реактивных нагрузок между генераторами по заданному закону. Его недостатком является то, что в процессе реализации задания возможен выход регулируемого параметра за заданное значение вследствие перерегулирования из-за не ючного расчета управляющего воздействия и возникновение незатухающих колебаний вокруг упомянутой точки.
Известен способ, обеспечивающий автоматическую разгрузку генератора при перегрузках, вызванных перерегулированием. Способ предотвращает автоколебания в предельном максимальном режиме за счет блокирования сигнала на повышение возбуждения после разгрузки. Его недостатком является недоиспользование нагрузочной способности генератора в случае разгрузки с перерегулированием.
Наиболее близким к предлагаемому способу по технической сущности и достигаемому результату является способ автоматического группового управления возбуждением синхронных генераторов, со- г гласно которому измеряют отклонение напряжения шин станции от заданной уставки и отклонение параметров распределения каждого генератора от оптимального значения, определяют количество включенных генераторов, статизмы их внешней и
VI VI
00 00
О W
нагрузочной характеристик, значение требуемого изменения уставки АРВ каждого генератора как функцию упомянутых параметров, формируют для каждого генератора значение управляющего сигнала путем умножения требуемого значения изменения уставки на постоянный коэффициент и передают управляющий сигнал в систему управления уставкой АРВ соответствующего генератора, после чего повторяют весь комплекс операций до снижения указанных отклонений до величин, определяемых соответствующими нормативными значениями, при этом при каждом повторении упомянутого комплекса операций определяют фактическое изменение уставки АРВ каждого генератора как разность уставок до и после выдачи управляющего сигнала, формируют корректирующий коэффициент как отношение требуемого значения изменения уставки к ее фактическому изменению и корректируют требуемое значение изменения уставки АРВ генератора путем его умножения ни корректирующий коэффициент, т.е. вводят в расчет истинное значение скорости изменения уставки АРВ.
Хотя способ и отстроен от перерегулирований обусловленнь х нестабильностью скоростных характеристик установочных устройств АРВ, в системах, реализующих этст способ, наблюдаются автоколебаний при работе в зонах ограничения в силу несовместимости задам ограничения, распределения и регулирования и неизбежных при этом погрешностях расчета.
Целью изобретения является повышение надежности.
Цель достигается тем, что в способе автоматического группового управления возбуждением синхронных генераторов, согласно которому измеряют отклонение напряжения шин станции от заданной ус- тавки и отклонение параметра распределения каждого генератора от оптимального значения, определяют количество включенных генераторов, статизм мх внешних и нагрузочных характеристик, скорости изменения уставок их АРВ, формируют Для каждого генератора управляющее воздействие расчетной длительности и передают в схемы возбуждения генераторов соответствующие управляющие сигналы, контролируют процесс реализации задания по факту выдачи соответствующего управляющего воздействия и при выявлении перерегулирования, определяемого по факту изменения направления управляющего воздействия в двух последующих циклах регулирования, вводят поправку а расчетное значение длительности управляющего воздействия и уменьшают его на заданную величину, повторяют эту операцию в каждом последующем цикле, если в нем выявляется перерегулирование, до тех пор, пока оно не
устранится или пока расчетное управляющее воздействие не снизится до заданной минимальной величин, и снимают поправку при изменении знака или увеличении модуля отклонения напряжения на шинах стан0 ции от уставки, а на прочих генераторах аналогично.
Сущность изобретения сводится к тому, , что по изменению направления двух последовательно выданных управляющих воз5 действий фиксируется автоколебательный процесс м производится его демпфирование в темпе процессе путем адаптивной перестройки каналов регулирования соответствующих агрегатов вплоть до нор0 мализации режима и завершения процесса реализации задания с последующим восстановлением исходной настройки системы при изменении уставки или режиме энергосистемы. Последнее распознавание, исходя
5 из того, что для завершенности реализации характерна стабильность отклонения центрального регулируемого параметра (напряжения шин) при отсутствии управляющих воздействий на всех агрегатах управляемой
0 группы, а изменение режима или уставки, вызывающее действие системы регулирования, однозначно связано с увеличением упомянутого отклонения либо с изменением его знака,
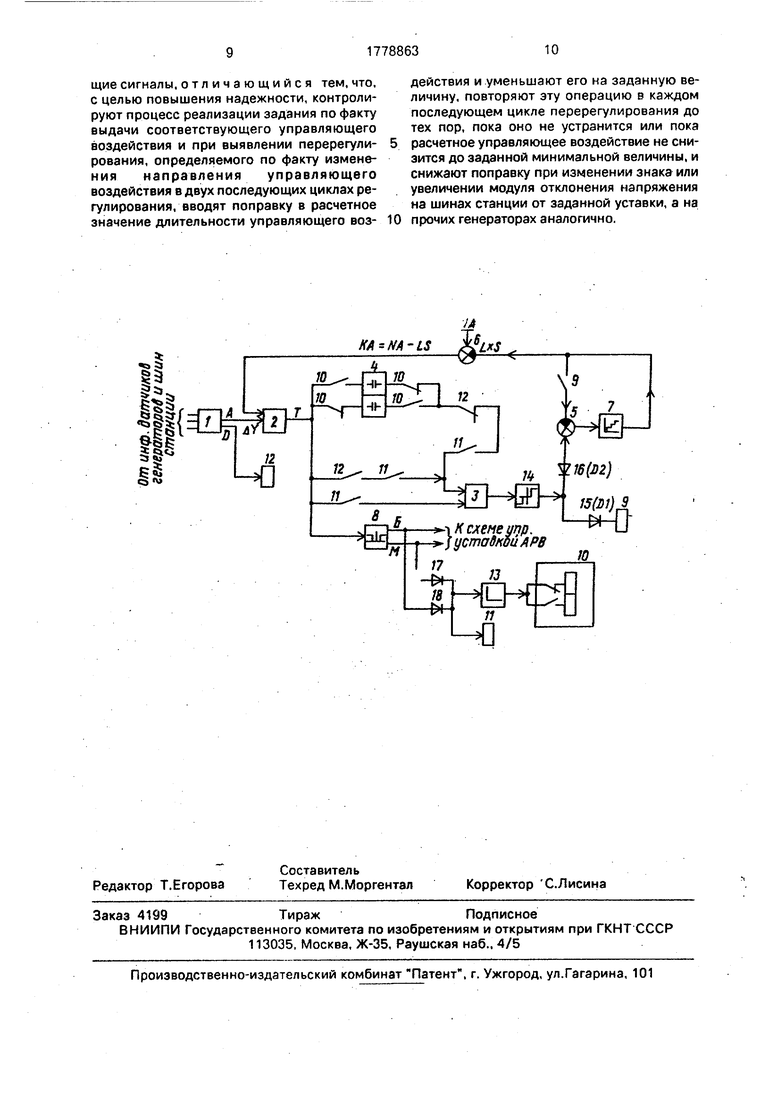
5 На чертеже представлен один из вариантов схемы, реализующей предлагаемый способ.
Схема содержит решающий блок 1 (РБ), определяющий в соответствии с заданными
0 законами распределения и регулирования требуемую величину изменения уставки АРВ и выдающий на выход А пропорцио- нальиый этой величине аналоговый сигнал A Y ,два блока умножения 2 (БУ1) и 3 (БУ2).
5 дцухканальный блок памяти (БП) любого типа, например, выполненный на базе интег- рирующих емкостей, два блока разности 5 (6Р1) и 6 (БР2), интегратор 7 (ШИ), два трехлозиционных нуль-органа 8
0 (И01) и 9 (Н02), двухпозиционное реле 19 (РЦ), фиксирующее четный и нечетный циклы регулирования, повторитель сигналов нуль-органа 11 (РП), реле нормализации 12 (РН), дифференциаторы 13 (Д1) и 14 (Д2),
5 вентили 15(81} и 16(82), реле сброса сигнала интегратора 17 (PC). Сигналы от датчиков параметров шин станции и генераторов поступают на входы расчетного блока 1, дискретный выход Д которого соединен с входом реле нормализации 12, а аналоговый А
-с первым входом блока умножения 2, второй вход которого соединен с выходом второго блока разности 6, а выход - входом нуль-органа 8, а также через замыкающий контакт повторителя 11 - с первым входом второго блока умножения 3, через последовательную цепь замыкающих контактов реле нормализации 12 и повторителя 11- с вторым входом второго блока умножения 3 и через замыкающий и размыкающий контакты двухпозиционного реле 10 - соответственно с входами первого и второго каналов блока памяти 4, выходы которых соответственно через размыкающий и замыкающий контакты двухпозиционного реле 10 объединены в общую точку, которая через последовательно соединенные размыкающий контакт реле нормализации 12 и замыкающий контакт повторителя 11 соединена с вторым входом второго блока умножения 3, выход которого соединен с входом второго нуль-органа 9, выходы которого соединены Б - с обмоткой реле сброса 17, а М
-через дифференциатор Д2 - с входом первого блока разности 5, выход которого соединен с входом интегратора 7, а второй вход через замыкающий контакт реле сброса 14
-с выходом интегратора 7 и первым входом второго блока разности 6, на второй вход которого подано нормативное задание, выходы нуль-органа больше Б и меньше М соединены со схемой управления АРВ генератора и через развязывающие вентили 15, 1В - с управляющим входом повторителя 11 и входом дифференциатора 13, выход которого соединен с управляющими входами двухпозиционого реле 10.
Нормально в процессе регулирования с выхода А решающего блока 1 поступает расчетный сигнал требуемого изменения устав- ки, который в блоке умножения 2 умножается на нормативное значение адаптивного коэффициента КА, равное NA, и в виде произведения Т Д Y КА поступает на вход нуль-органа 8, где преобразуется в соответствующий временной управляющий сигнал Б или М, поступающий в схему управления уставкой АРВ. При этом при каждой выдаче сигнала срабатывает повторитель 11. а на выходе дифференциатора 13 формируется импульс, обеспечивающий переориентацию двухпозиционного реле 10. Последнее своими контактами обеспечивает в каждом текущем цикле запоминание расчетного значения Т данного цикла в соответствующем канале блока памяти 4 и его выдачу в схему регулирования в последующем цикле в виде биполярной аналоговой величины, знак которой отражает знак отклонения, а следовательно, направление управляющего воздействия больше (+), либо меньше (-). Соответственно в каждом регулирующем цикле, если имеет место выдача управляющего воздей- 5 ствия в схему возбуждения генератора, на входы второго блока умножения 3 через контакты повторителя 11 поступают с выхода первого блока умножения 2 и выхода одного из каналов блоиа памяти 4 сигналы 0 предшествующего и текущего отклонений. При этом в соответствии с ориентацией двухпозиционного реле 10 в одном из каналов блока памяти 4 всегда обеспечивается запоминание текущего расчетного сигнала
5 и подготавливается цепь его выдачи в схему в следующем цикле.
Если знак отклонения, а следовательно, направление управляющего воздействия в двух последующих циклах остаются неиз0 менными, на вход второго блока умножения 3 поступают сигналы одинаковой полярности, и на его выходе формируется положительныйаналоговыйсигнал, преобразуемый нуль-органом 9 в дискрет5 ный сигнал, поступающий с его выхода Б на управляющий вход реле сброса 17. Последнее срабатывает, замыкает своим контактом цепь обратной связи интегратора 7, обеспечивая сброс его выходного сигнала
0 до нуля и подачу в схему с выхода второго
блока разности 6 нормативного значения
NA адаптивного коэффициента на второй
вход первого блока умножения (КА NA).
Изменение знака отклонения в двух по5 следующих циклах свидетельствует о перерегулировании и необходимости уменьшения коэффициента усиления канала регулирования, что осуществляется путем уменьшенияадаптивного
0 коэффициента КА, формируемого блоком разности 6. В этом случае текущее и ретроспективное значения отклонения, поступающие на входы второго блока умножения 3. будут иметь разные знаки, что соответству5 .ет отрицательному знаку сигнала на входе нуль-органа 9. а следовательно, выдаче позиционного сигнала на его выход М. При этом в пусковой цепи реле сброса 17 - на выходе Б нуль-органа 9 - сигнал отсутству0 ет, реле сброса 17 находится в обеспеченном положении и своим контактом размыкает цепь обратной связи интегратора 7, чем обеспечивается возможность интегрирования. Упомянутый позиционный
5 сигнал с входа М нуль-органа 9, преобразованный дифференциатором 14 в дозированный временной сигнал, поступает на вход первого блока разности 5, который передает его в виде импульсного дозированного по времени управляющего воздействия на
вход интегратора 7, обеспечивая таким образом изменение его выходного сигнала на заданную величину, определяемую выбранной ступенью интегрирования. При поступлении очередного позиционного сигнала процесс повторяется. Наличие дифференциатора 14 в данном случае обеспечивает однократность поступления управляющего воздействия и его определенность по времени независимо от длительности цикла и величины пауз между позиционными сигналами М-выхода нуль-органа 9. Соответственно на выходе блока разности 6 формируется уменьшенное значение адаптивного коэффициента КА NA - LS, где L и S - соответственно количество и величина ступеней интегрирования, а произведение LS - выходной сигнал интегратора 7. Если в последующем цикле перерегулирование не устранилось, то LS по той же процедуре наращивается еще на одну ступень, и значение КА уменьшается еще на одну ступень S вплоть до устранения перерегулирования или сведения выходного сигнала первого блока умножения 2 к нулю. Последнее свидетельствует о неуспешной адаптации и невозможности устойчивой реализации задания. Соответственно в этом случае система блокируется (на схеме не показано).
Если в предшествующем цикле отклонение было равно нулю и соответственно сигнал на регулирование не выдавался, то будет равно нулю ретроспективное значение, подаваемое на второй вход второго блока умножения 3, т.е на его выходе и на выходах нуль-органа 9 сигналы будут равны нулю. Поскольку в этом случае реле сброса 17 не срабатывает, на выходе интегратора 7 сохраняется предшествующее значение и соответственно значение адаптивного коэффициента КА на выходе второго блока разности 6 остается неизменным, т.е. тем, которое сформировалось ранее в результате действия системы регулирования.
Восстановление нормативного значения адаптивного коэффициента производится в соответствии с предлагаемым способом после завершения реализации задания. Задача решается решающим блоком 1, который при наличии соответствующих показаний, например при изменении отклонения по напряжению от заданной уставки, выдает на дискретный выход Д сигнал на срабатывание реле нормализации 12 на все время данного цикла регулирования. При этом контактом реле нормализации обеспечивается подача на второй вход блока умножения 3 того же сигнала, что и на его первый вход - текущего значения отклонения, и независимо от знака отклонения выходной
сигнал блока умножения 3 будет положительным. В этом случае в соответствии с ранее описанной процедурой-срабатывает реле сброса 17, сигнал на выходе интегратора 7 станет равным нулю и восстановится
нормативное значение адаптивного коэффициента на выходе второго блока равности 6 КА - NA.
Таким образом, при появлении любых автоколебаний в ходе реализации задания
0 система изменяет настройку коэффициента
передачи, обеспечивая либо устойчивую ре, элизацию задания, либо вывод агрегата из
системы регулирования (при уменьшении
NA до нуля), причем с автоматическим об5 ратным вводом его в систему, восстановлением исходной настройки и последующей адаптацией к перерегулированию при каждом изменении режима. Соответственно осуществляется оптимальная настройка ре0 гулирующего комплекса по индивидуальным характеристикам в темпе процесса с учетом особенностей процесса регулирования и параметров режима, чем и обеспечивается поставленная цель - повышение
5 надежности.
Предлагаемый способ может быть реализован на серийной аппаратуре регулирования, например, типа Каскад 2 завода МЗТА, на микропроцессорных контролле0 pax типа Ремиконт или Ломикант, выпу- скаемыхЧебоксарскимПО
Электроприбор, а также на любой цифровой регулирующей ЭВМ.
Технико-экономический эффект от
5 внедрения предлагаемого способа получается за счет улучшения качества поддерживания заданных параметров и максимального использования нагрузочных возможностей агрегатов. Последнее экви0 валентно установке дополнительного оборудования для потребления и генерирования реактивной мощности, равных примерно 30% установленной реактивной мощности станции.
5 Формула изобретения
Способ автоматического группового управления возбуждением синхронных генераторов электростанций, согласно которому измеряют отклонение напряжения шин
0 станции от заданной уставки и отклонение параметра распределения каждого генератора от оптимального значения, определяют количество включенных генераторов, статизм их внешних и нагрузочных характе5 ристик, скорости изменения уставок их АРВ, формируют для каждого генератора управляющее воздействие расчетной длительности и передают в схемы возбуждения генераторов соответствующие управляющие сигналы, отличающийся тем, что, с целью повышения надежности, контролируют процесс реализации задания по факту выдачи соответствующего управляющего воздействия и при выявлении перерегулирования, определяемого по факту изменения направления управляющего воздействия в двух последующих циклах регулирования, вводят поправку в расчетное значение длительности управляющего воз0
действия и уменьшают его на заданную величину, повторяют эту операцию в каждом последующем цикле перерегулирования до тех пор, пока оно не устранится или пока расчетное управляющее воздействие не снизится до заданной минимальной величины, и снижают поправку при изменении знака или увеличении модуля отклонения напряжения на шинах станции от заданной уставки, а на прочих генераторах аналогично.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ распределения реактивных нагрузок между генераторами электростанции | 1987 |
|
SU1539894A1 |
| Устройство для группового управления возбуждением генераторов | 1981 |
|
SU1001427A1 |
| Устройство автоматического регулирования напряжения на шинах электростанции | 1987 |
|
SU1520628A1 |
| Устройство для аварийного управления активной мощностью электростанций | 1981 |
|
SU983891A1 |
| Способ противоаварийного управления мощностью турбин | 1980 |
|
SU868918A1 |
| Устройство автоматического регулирования толщины полосового проката | 1982 |
|
SU1068193A1 |
| Устройство для регулирования возбуждения синхронного генератора | 1973 |
|
SU479212A1 |
| Способ автоматического управления мощностью резервных генераторов при аварийном понижении частоты в энергосистеме | 1989 |
|
SU1684859A1 |
| Способ автоматического ограничения перегрузок синхронного генератора и устройство для его осуществления | 1982 |
|
SU1080233A1 |
| Адаптивная система регулирования | 1978 |
|
SU813356A1 |
Использование: в электротехнике, в устройствах автоматического регулирования напряжением на электростанциях и подстанциях с синхронными генераторами. Сущность: в функцию, формирующую длительность управляющего воздействия на регулирование возбуждения синхронных генераторов, вводят переменный коэффициент, который при выявлении перерегулирования, определяемого по факту изменения направления управляющего воздействия в двух последующих циклах регулирования, уменьшают на заданную величину и восстанавливают его исходное нормативное значение при изменении отклонения напряжения шин станции от заданной уставки. 1 ил. сл с
fl
7f
схеме упр. - }устадк5иАРВ
W(J)2)
адВДД
-ЗД
| Способ автоматического группового управления возбуждением синхронных генераторов электростанции | 1982 |
|
SU1056357A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ автоматического ограничения перегрузок синхронного генератора и устройство для его осуществления | 1982 |
|
SU1080233A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР N° 1080234, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
