Изобретение относится к устройсBciM автоматического регулирования и управления на непрерывном прокатном стане холодной прокатки и предназначено для автоматического регулирования толщины полосы на выходе стана.
Известно устройство регулирования толщины полосы по ее отклонению от заданного значения на непрерывном стане холодной прокатки, в котором с целью повышения качества регулирования используется интегратор включенный на вход нелинейного преобразователя и параллельные цепи сброса интегратора Ц.
Однако для данного устройства характерно недостаточно высокое быстродействие регулятора при отработке сигналов отклонений нажимными винтами клети.
Известно также устройство автоматического регулирования толщины полосы на прокатном стане, в котором с целью повышения быстродействия регулирования дифференцирование сигнала отклонения толщины производится в период его нарастания, затем блокируют дифференцирование, размыкая систему регулирования, далее интегрируют результат дифференцирования и по результату интегрирования управляют скоростями клетей L21.
Недостатком этого устройства является существенное запаздывание начала отработки сигнала рассогласования выходной толщины полосы.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство регулирования толщины полосы, содержащее измеритель - толщины полосы, задатчик толщины, блок рассогласования f котором выделяется сигЕ{ал рассогласования текущего и згщанного значени толщины, корректор коэффициента уси-ления, включенный на вход интегрального, пропорционального и дифференциального усилителей, выходы которых под-ключены через сумматор к входу системы управления главным приводом клети, выход блока рассогласования также через инерционное.звено подключен параллельно на вход усилителя 3
Однако в известном устройстве качество регулирования толщины полосы гфи различных сортаментах и величинах отклонений регулируемого параметра невысокое, что может проявляться в перерегулировании или в затягивании отработки сигнала отклонения.
Цель изобретения - повышение качества прокатываемой полосы путем увеличения быстродействия работы устройртва и исключения перерегулирования.
Поставленная цель достигается тем что в устройство, содержащее измеритель натяжения, измеритель толщины, выход которого соединен с первьлм входом блока рассогласования, на второй вход которого подключен выход задатчика толщины, нелинейный дифференциатор и интегратор, информационные вхЬды которых подсоединены к выходублока рассогласования, а выходы.соответственно - к второму и третьему входам сумматора, выход сумматора подсоединен к входу системы управления главным приводом клети, дополнительно вводятся блок выделения модуля сигнала рассогласования, вход которого, подсоединен к выходу блока рассогласования, нульорган, вход которого соединен с выходом блока вьщеления модуля сигнала рассогласования, блок управления, вход которого подсоединен к выходу нуль-органа, а выход - к управляющим входам нелинейного дифференциатор и интегратора, формирователь максимального управляющего воздействия, первый информационный вход которого соединен с выходом измерителя натяжения, второй информационный вход соединен с выходом блока рассогласования, а управляющий вход соединен с выходом блока управления, а выход формирователя максимального управлякщего воздействия подключен к первому входу сумматора.
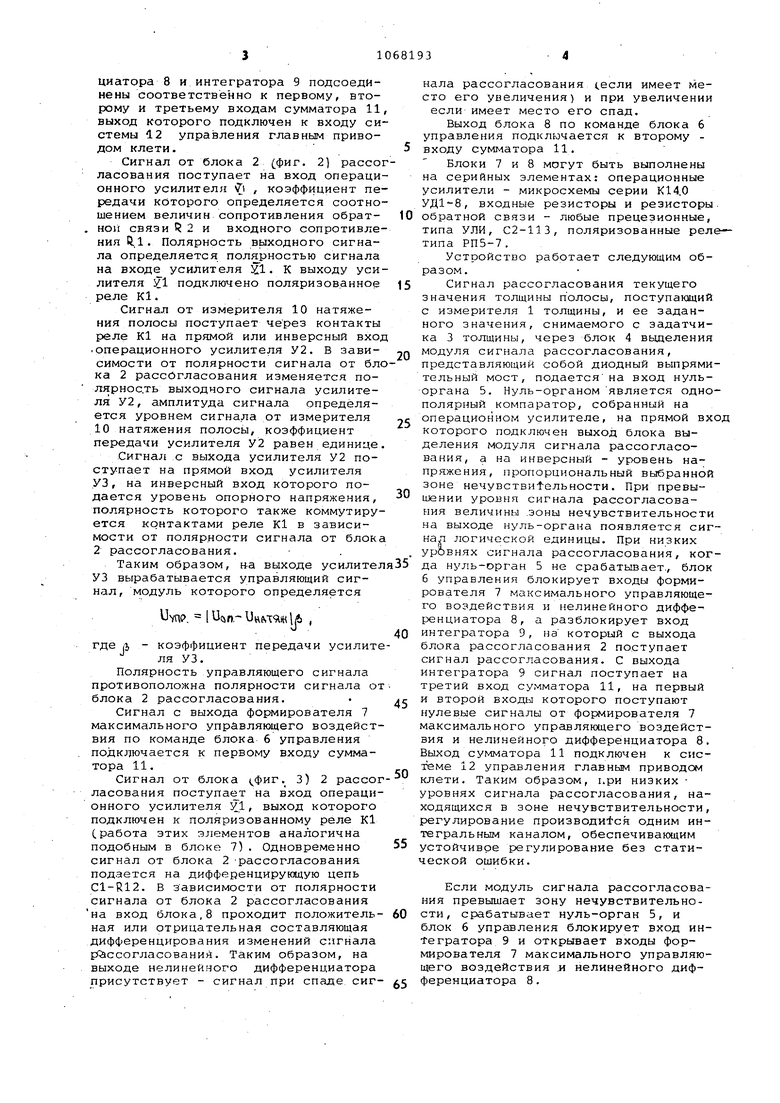
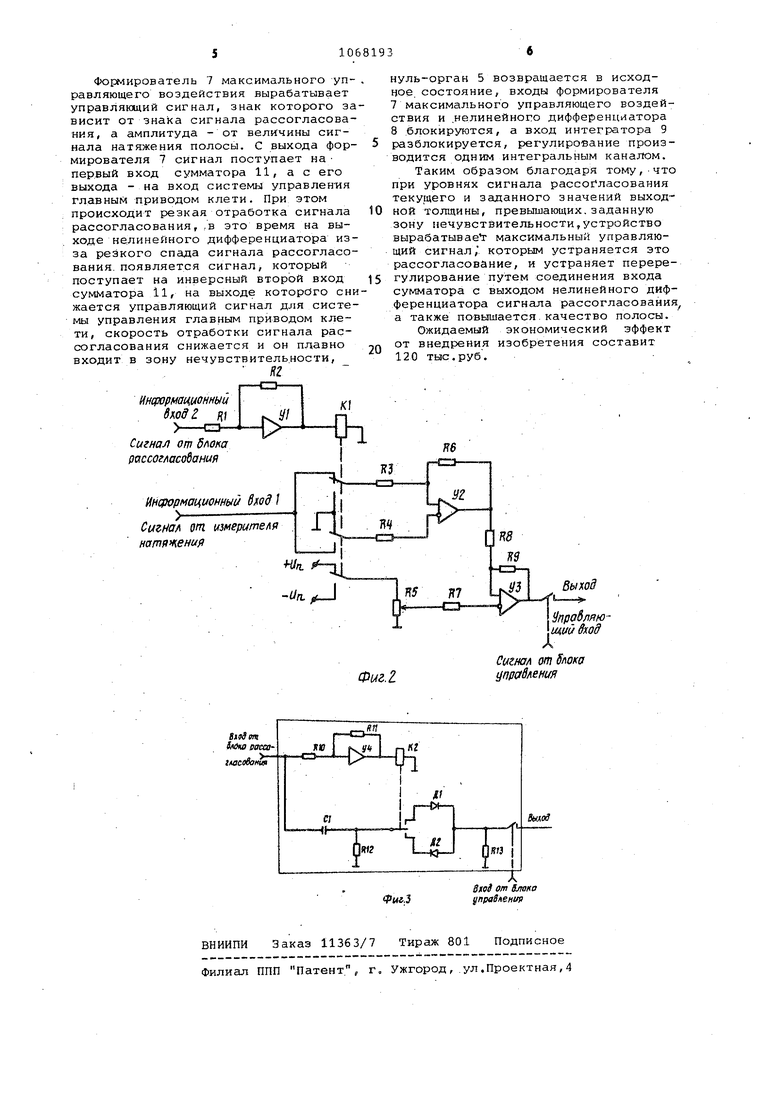
На фиг. 1 представлена блок-схема устройства автоматического регулирования толщины полосового проката; на фиг. 2 - внутренняя структура блока формирователя максимального управляющего воздействия; на фиг. 3 внутренняя структура блока нелинейного дифференциатора.
Измеритель 1 толщины полосы выходом подключен к первому входу блока
2рассогласования, к второму входу которого подключен выход задатчика
3толщины, выход блока 2 рассогласования подключен к входу блока 4 выделения модуля сигнала рассогласования, выход которого подключен к вход нуль-органа 5. Выход нуль-органа 5 подключен к входу- блока 6 управле ния, выход которого соединен с управЛяквдими входами формирователя 7 максимального управляющего воздействия, нелинейного дифференциа±ора 8 и интегратора 9, а второй информационный вход формирователя 7 максимального управляющего воздействия и инерционные входы нелинейного дифференциатор 8 и интегратора 9 подсоединены к выходу блока 2 рассогласования. Первый информационный вход формирователя максимального управляющего воздейстйия подключен к выходу измерителя
10 натяжения полосы. Выходы формирователя 7 максимального управляющего воздействия, нелинейного дифференциатора 8 и интегратора 9 подсоединены соответственно к первому, второму и третьему входам сумматора 11 выход которого подключен к входу си стемы 12 управления главным приводом клети. Сигнал от блока 2 (фиг. 2) рассо ласования поступает на вход операци онного усилителя 71 , коэффициент пе редачи которого определяется соотно шением величин сопротивления обрат. НОИ связи R 2 и входного сопротивле ния Яд. Полярность выходного сигнала определяется полярностью сигнала на входе усилителя Й- К выходу уси лителя 1 подключено поляризованное реле К1. Сигнал от измерителя 10 натяжения полосы поступает через контакты реле К1 на прямой или инверсный вхо операционного усилителя У2. В зависимости от полярности сигнала от бл ка 2 рассогласования изменяется полярнос.ть выходного сигнала усилителя У2, амплитуда сигнала определяется уровнем сигнала от измерителя 10 натяжения полосы, коэффициент передачи усилителя У2 равен единице Сигнал с выхода усилителя У2 поступает на прямой вход усилителя УЗ, на инверсный вход которого подается уровень опорного напряжения, полярность которого также коммутируется контактами реле К1 в зависимости от полярности сигнала от блок 2 рассогласования. Таким образом, на выходе усилител УЗ вырабатывается управляющий сигнал, модуль которого определяется Uvni, 1ийп,Инлтзд1А , где л - коэффициент передачи усилите ля УЗ. Полярность управляющего сигнала противоположна полярности сигнала от блока 2 рассогласования. Сигнал с выхода формирователя 7 максимального управляющего воздействия по команде блока 6 управления подключается к первому входу сумматора 11. Сигнал от блока (фиг. 3) 2 рассог ласования поступае т на вход операционного усилителя , выход которого подключен к поляризованному реле К1 С работа этих элементов аналогична подобным в блоке 7). Одновременно сигнал от блока 2 -рассогласования подается на дифференцирующую цепь C1-R12. В зависимости от полярности сигнала от блока 2 рассогласования на вход блока,8 проходит положительная или отрицательная составляющая дифференцирования изменений сигнала ЕЙссогласования. Таким образом, на выходе нелинейного дифференциатора присутствует - сигнал при спаде сигнала рассогласования (.если имеет место его увеличения) и при увеличении если имеет место его спад. Выход блока 8 по команде блока 6 управления подключается к второму входу сумматора 11. Блоки 7 и 8 могут быть выполнены на серийных элементах: операционные усилители - микросхемы серии К14.0 yfll-S, входные резисторы и резисторы обратной связи - любые прецезионные, типа УЛИ, С2-113, поляризованные релетипа РП5-7. Устройство работает следующим образом. Сигнал рассогласования текущего значения толщины полосы, поступакиций с измерителя 1 толщины, и ее заданного значения, снимаемого с задатчика 3 толщины, через блок 4 выделения модуля сигнала рассогласования, представляющий собой диодный выпрямительный мост, подаетсяна вход нульоргана 5. Нуль-органом является однополярный компаратор, собранный на операционном усилителе, на прямой вход которого подключен выход блока выделения модуля сигнала рассогласования, а на инверсный - уровень напряжения, пропорциональный выбранной зоне нeчyвcтвиteльнocти. При превышении уровня сигнала рассогласования величины .зоны нечувствительности на выходе нуль-органа появляется сигнал логической единицы. При низких уровнях сигнала рассогласования, когда нуль-орган 5 не срабатывает., блок 6 управления блокирует входы формирователя 7 максимального управляющего воздействия и нелинейного дифференциатора 8, а разблокирует вход интегратора 9, на который с выхода блока рассогласования 2 поступает сигнал рассогласования. С выхода интегратора 9 сигнал поступает на третий вход сумматора 11, на первый и второй входы которого поступают нулевые сигналы от формирователя 7 максимального управляющего воздействия и нелинейного дифференциатора 8, Выход сумматора 11 подключен к системе 12 управления главным приводом клети. Таким образом, г.ри низких уровнях сигнала рассогласования, находящихся в зоне нечувствительности, регулирование производился одним интегральным каналом, обеспечивающим устойчивое регулирование без статической ошибки. Если модуль сигнала рассогласования превышает зону нечувствительности, срабатывает нуль-орган 5, и блок 6 управления блокирует вход интегратора 9 и открывает входы формирователя 7 максимального управляющего воздействия я нелинейного дифференциатора 8.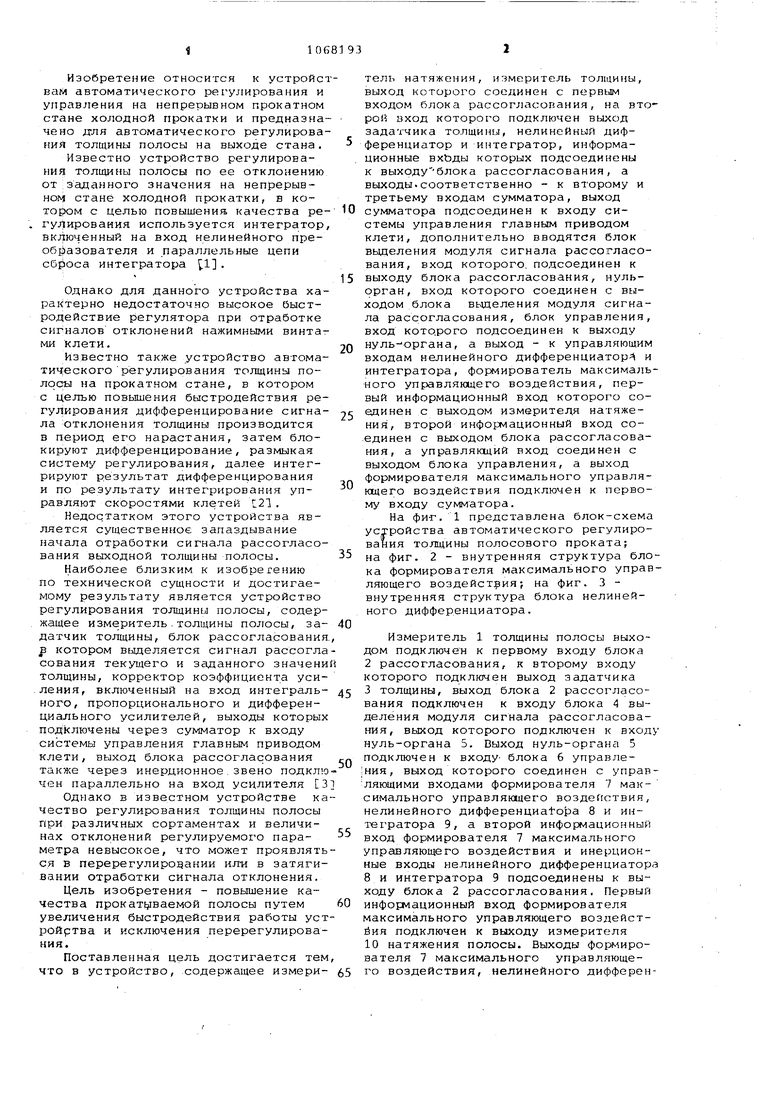
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор относительного обжатия прокатываемой полосы | 1981 |
|
SU944696A1 |
| Устройство для автоматического регулирования толщины полосы на непрерывном прокатном стане | 1982 |
|
SU1024135A1 |
| Способ автоматического регулирования относительного обжатия полосы в прокатном стане и система для его осуществления | 1987 |
|
SU1503917A1 |
| Устройство для формирования сигнала управления | 1977 |
|
SU734612A1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Способ регулирования частоты вращения двигателя внутреннего сгорания и устройство для его осуществления | 1983 |
|
SU1149045A1 |
| Устройство для регулирования толщины полосы на прокатном стане | 1991 |
|
SU1794518A1 |
УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТОЛЩИНЫ ПОЛОСОВОГО ПРОКАТА, содержащее измеритель натяжения, измеритель толщины, выход которого соединен с первым входом блока рассогласования, на второй вход которого подсоединен выход задатчика толщины, нелинейный диффере циатор и интегратор информационные входы которых подсоединены к выходу блока рассогласования, а выходы соответственно - к второму и третьему входам сумматора, выход сумматора подсоединен к входу системы управления главным приводом клети, о тли чающееся тем, что, с целью повышения качества прокатываемой полосы путем увеличения быстродействия работы устройства и исключения перерегулирования, оно дополнительно содержит блок выделения модуля сигнала рассогласования, вход которого подсоединен к выходу блока рассогласования, нуль-орган, вход которого соединен с выходом блока выделения модуля сигнала рассогласо вания, блок управления, вход которого подсоединен к выходу нуль-органа, а выход - к управляющим входам нелинейного дифференциатора и интегратора, формирователь максимального управляющего воздействия, первый информационный вход которого соединен с выходом измерителя натяжения, второй информационный вход соединен с выхсяом блока рассогласования, упраВ ляющий вход соединен с выходом блока управления, а выход формирователя максимального управляющего воздействия подключен к первому входу сумматора.