Изобретение относится к сельскому хозяйству, а именно к средствам автоматизации дождевания.
Известно устройство для автоматического управления дождевальной машиной кругового действия, включающее основной блок управления с пультом управления, датчики аварийного излома для установки на каждом сочленении секций трубопровода, соответствующие системы управления каждой тележкой.
Недостатком данного устройства является то, что при работе дождевальной машины не контролируется ее положение на орошаемом участке.
Известно и другое устройство для автоматического управления дождевальной машиной кругового действия, включающее центральный блок управления с пультом управления, датчики аварийного излома для установки на каждом сочленении секций трубопровода, соответствующие системы управления каждой тележкой, датчик ориентации трубопровода и датчики давления, подключенные к входам центрального блока управления, выходы которого через вращающийся согласующий блок подключены к линиям связи.
Недостатком указанного устройства является то, что при работе дождевальной машины трудно проконтролировать готовность всех ее узлов и низкая надежность работы.
Целью изобретения является расширение технологических возможностей, повышение надежности работы и повышение точности внесения поливной нормы.
Это достигается тем, что устройство снабжено датчиком контроля сопротивления изоляции с блоком подключения данного датчика, датчиком температуры окружающей среды, а также для каждой системы управления тележкой, датчиком тока электродвигателя и датчиком излома трубопровода, причем данные датчики подключены к электрическим информационным входам соответствующей системы управления тележкой, при этом системы управления нечетными тележками последовательно, по возрастанию номера, связаны друг с другом и входом системы управления последней четной тележкой, к выходу которой подключены последовательно связанные по убыванию номера системы управления четными тележками, при этом вход системы управления первой тележкой и выход системы управления второй тележки подключения, соответственно, к выходу и входу центрального блока управления, с другим входом которого связан датчик температуры окружающей среды, а с другим выходом вход управления блока подключения датчика контроля сопротивления изоляции.
А также тем, что линии связи выполнены в виде волоконно-оптических линий и, кроме того, тем, что оно снабжено дистанционным блоком управления, связанным с основным блоком управления.
Причем система управления тележкой выполнена в виде двух схем преобразования, подключенных к регистру ввода-вывода информации, приемника и передатчика оптических сигналов в кодером-декодером кода передачи данных, схемы распознавания номера тележки, блока управления и схемы управления электродвигателем, причем кодер-декодер передачи связан по выходам со схемой распознавания номера тележки и блоком управления, выходы блока управления подключены к схеме распознавания номера тележки и регистру ввода-вывода, а регистр ввода-вывода соединен с кодером-декодером кода передачи и со схемой управления электродвигателем, причем регистр ввода-вывода имеет информативные входы для подключения к дополнительным технологическим датчикам и датчику аварийного излома, а схема управления электродвигателем выполнена с возможностью подключения к датчикам аварийного состояния.
И тем, что вращающийся согласующий блок выполнен в виде корпуса, в котором расположены линии связи, размещенные по винтовой линии против направления заданного вращения машины.
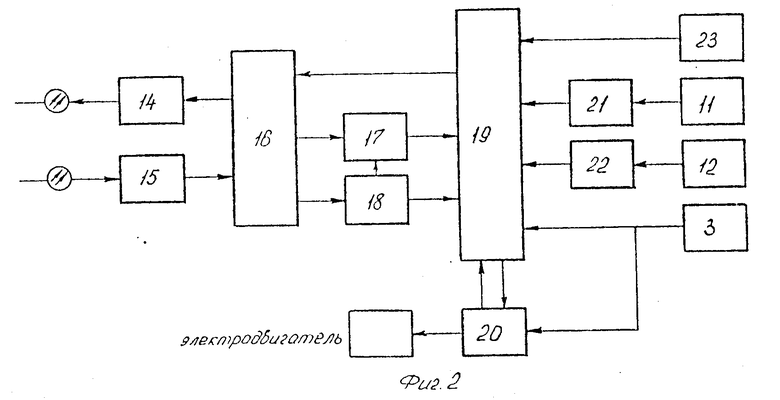
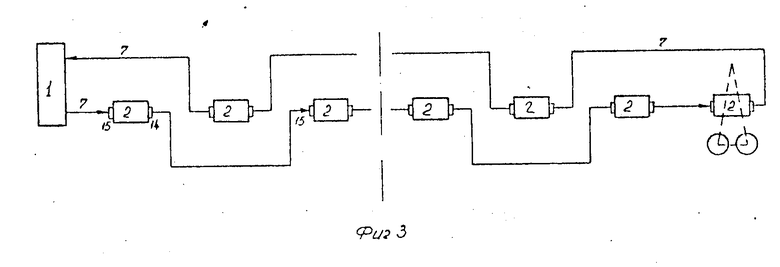
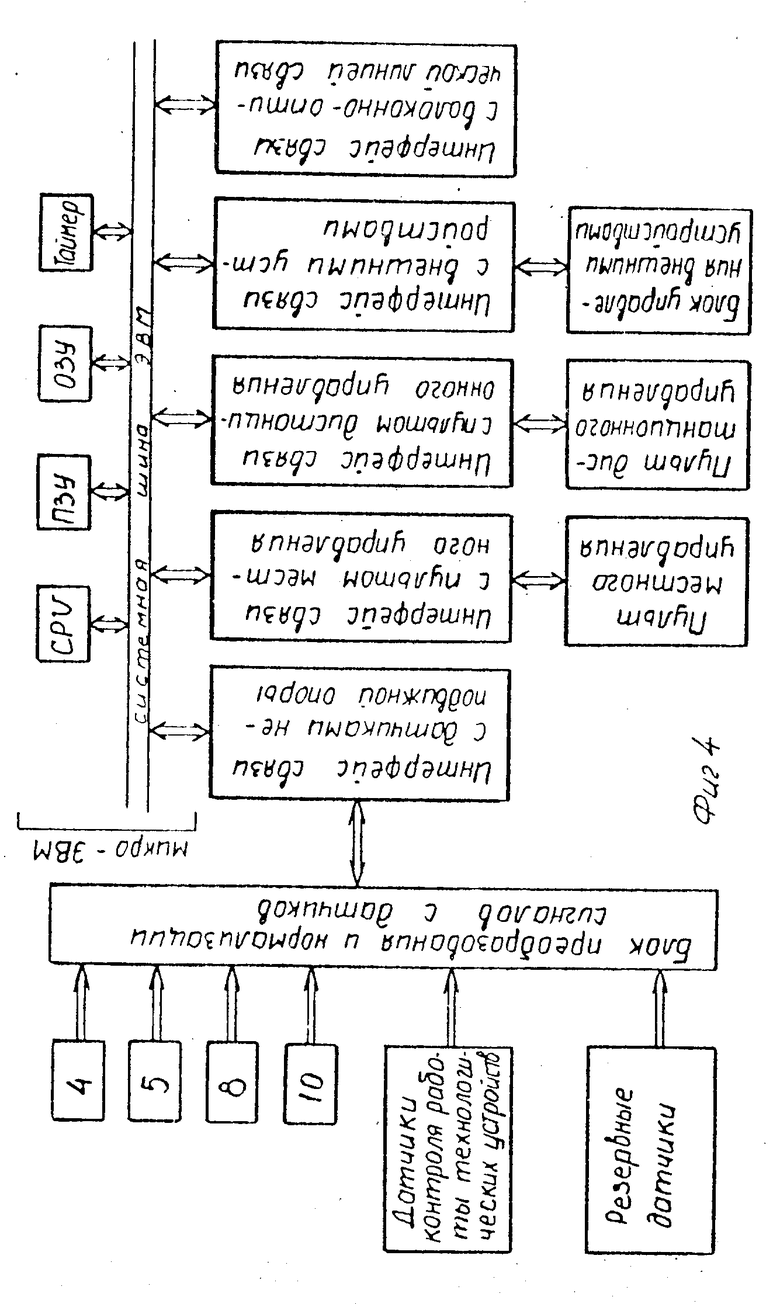
На фиг. 1 показана общая схема устройства; на фиг. 2 схема управления тележками; на фиг. 3 схема связи системы управления тележками с центральным блоком управления; на фиг. 4 схема связи микроЭВМ с остальными узлами устройства.
Устройство для осуществления автоматического управления дождевальной машиной кругового действия содержит центральный блок управления с пультом управления 1, системы управления каждой тележкой 2, датчики аварийного излома 3 для установки на каждом сочленении секции трубопровода, датчик ориентации 4, датчик давления воды 5, вращающийся согласующий блок 6, линии связи 7, датчик контроля сопротивления изоляции 8, блок подключения данного датчика 9, датчик температуры окружающей среды 10, датчик излома трубопровода 11, датчики тока каждого электродвигателя тележки 12. При этом линии связи 7 выполняются волоконно-оптическими кабелями. Устройство может иметь дистанционный блок управления 13.
Каждая из систем управления тележек 2 выполнена в виде передатчика оптических сигналов 14, приемника оптических сигналов 15, кодера-декодера кода передачи 16, схемы распознавания номера тележки 17, блока управления 18, регистра ввода-вывода информации 19, схемы управления электродвигателем 20, схемы преобразования (угол-код) 21, схемы преобразования (ток-код) 22.
На фиг. 4 показана блок-схема (один из вариантов) связи микроЭВМ с остальными узлами устройства.
Все датчики 3,4,5,8,10,11,12 связаны с центральным блоком управления 1 непосредственно или через системы управления тележками 2 посредством линий связи 7. Эти линии 7 соединяют через одну тележку приемник оптических сигналов 15 с предыдущим передатчиком оптических сигналов 14. Вход и выход линий 7 подключен к блоку 1 (микроЭВМ). Каждая система 2 подключена посредством регистра 19 и схем 21 и 22 к датчику излома 11, датчику аварийного излома 3, датчику тока 12 и другим технологическим датчикам 23, например, датчикам влажности, дождя и т.п.
Для охлаждения центрального блока управления 1, например, микроЭВМ или микроконтроллера с соответствующей периферией корпус этого блока 1 может быть прикреплен к неподвижной части трубопровода в зоне неподвижной опоры, при этом поливная вода будет охлаждать стенку трубопровода и корпус блока 1. Вращающийся согласующий блок 6, предназначенный для передачи электропитания и информационных сигналов, имеет часть для передачи оптических сигналов 24 и часть для передачи электрических 25, которая может быть выполнена в виде контакторов, часть 24 в виде вращающихся приемо-передающих оптических систем. Кроме того, обе части могут быть выполнены в виде линий связи 7 и электропитания 26, размещенных в корпусе по винтовой линии. При этом число витков этой линии равно числу оборотов ДМ, которое она совершает, например, за сезон. При этом витки закручены против предполагаемого направления движения ДМ. Следовательно, к концу сезонных работ обе линии 7 и 26 будут в раскрученном состоянии. На входе в трубопровод ДМ установлен электрогидроклапан 27.
Устройство работает следующим образом.
В исходный момент на центральном 1 или дистанционном 13 блоках управления задаются исходные параметры, поливная норма, наличие дополнительного технологического оборудования (например, для внесения удобрений). Включается система уставок (из блока 1) для допустимых значений работы ДМ. Информация от датчика температуры среды 10, датчика ориентации 4 поступает на блок 1. При нахождении этих параметров в норме опрашиваются датчики излома 11, датчики аварийного излома 3. При нахождении сигналов от этих датчиков в допустимых режимах, датчик 8 (например, мегаомметр) посредством блока 9 (контактора) подключают к данной фазной линии и последовательно связывают с фазой соответствующего электродвигателя (или электродвигателей) каждой тележки и измеряют сопротивление изоляции электродвигателей.
Если изоляция каких-либо электродвигателей ниже нормы, в блоке 1 формируется сигнал о необходимости сушки этих электродвигателей. После того, как изоляция проверена, блок 1 подает электропитание на линию 26 и электрогидроклапан 27, контролируя давление воды в трубопроводе датчиком 5. В случае наличия заданного давления тележки начинают перемещаться в зависимости от заданной скорости концевой тележки. Управление включением электродвигателей тележек осуществляет блок 1 по сигналам, поступающим от датчиков излома 11 и датчиков тока 12 систем 2.
По поступающей информации от датчиков 11 и 12 блок 1 запрещает включение электродвигателя отставшей тележки в случае, если момент его включения совпадает с интервалом времени пуска электропривода любой другой тележки до окончания переходного процесса в том электроприводе. Это обеспечивает во время пуска и работы ДМ одновременный пуск только привода одной тележки, тем самым снижая до минимума электропотребление САУ в переходных режимах и падение напряжения в линии силового питания по машине.
Блок 1 опрашивает каждую систему 2 последовательно, через одну тележку, что позволяет экономить волоконно-оптическую линию связи и оптимально ее использовать.
Информация с выхода блока 1 поступает на приемник 15 системы 2 тележки. Декодированный в декодере 16 сигнал поступает в блок управления 18 и схему разпознавания номера тележки 17 и далее в регистр ввода-вывода 19. При совпадении кодов запроса и кода тележки информация принимается, иначе ее перегоняют в кодер кодера-декодера 16 и через передатчик 14 переводят к следующей тележке. Если информация принята, блок 18 инициирует регистр 19 и информация от датчиков 3, 11, 12, 23 через регистр 19 поступает в передатчик 14 и далее передается в линию 7 к блоку 1. В случае кодовых посылок сигналов управления от блока 1 регистр 19 выдает управляющие сигналы на схему 20.
Следует отметить, что датчики аварийного излома 3 напрямую связаны со схемой 2, поскольку являются основными при определении допустимого излома трубопровода. При этом блок 1 по сигналу датчика ориентации 4 определяет координаты точки положения тележки. В процессе полива это позволяет иметь динамичную информацию об изменении траектории хода каждой тележки по ее колее.
Следует отметить, что на последней тележке может находиться насос для обработки углов поля, который включается по команде от блока 1. В случае расположения ДМ на местности с уклоном блок 1 может задавать темп движения последней тележки (для учета естественного скатывания и стока), что позволит более точно вносить поливную порцию. При перемещении согласующего блока 6 наиболее просто информацию передавать по линии 24, 25, размещенным по спирали против хода движения ДМ, т.к. в данном случае имеется наибольшая помехозащищенность, а при перемещении ДМ за сезон в пределах десятка оборотов оптический и силовой кабели не перепутываются и не ломаются.
При внесении заданной нормы ДМ останавливают, отключая вначале подачу воды в трубопровод, а затем снимая электропитание с двигателей. После чего повторяют операцию с проверкой изоляции двигателей, что позволяет оперативно определять неисправные двигатели и постоянно держать ДМ в готовности к поливу.
Применение указанного устройства на ДМ типа "Кубань" позволит исключить включение ДМ с неисправными двигателями, оптимизировать внесение поливной нормы, повысить эксплуатационную надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДОЖДЕВАЛЬНОЙ МАШИНЫ КРУГОВОГО ДЕЙСТВИЯ | 1990 |
|
RU1778920C |
| ЭНЕРГОСБЕРЕГАЮЩАЯ АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА С НИЗКОНАПОРНЫМИ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2009 |
|
RU2402199C1 |
| Устройство для внесения удобрений к дождевальной машине | 1988 |
|
SU1544289A1 |
| АВТОМАТИЗИРОВАННАЯ ОРОСИТЕЛЬНАЯ СИСТЕМА С НИЗКОНАПОРНЫМИ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2007 |
|
RU2354110C1 |
| Устройство управления электрифицированной дождевальной машиной | 1990 |
|
SU1745158A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ТЕЛЕЖКИ МНОГООПОРНОЙ ФРОНТАЛЬНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 1990 |
|
RU2072770C1 |
| Автоматизированная оросительная система | 1982 |
|
SU1136769A1 |
| Устройство для управления электрической дождевальной машиной | 1987 |
|
SU1554831A1 |
| Устройство для испытания многоопорной фронтальной дождеваельной машины | 1990 |
|
SU1813370A1 |
| Система программного управления многоопорной дождевальной машиной кругового действия | 1989 |
|
SU1658920A1 |
Использование: изобретение относится к сельскому хозяйству, а именно к средствам автоматизации дождевания. Сущность изобретения: устройство для автоматического управления дождевальной машиной включает систему управления тележками 2, связанную с блоком управления 1, к которому также подключены датчик температуры окружающей среды 10, датчик давления воды 5, датчик ориентации 4. При работе устройства по линиям связи 7 происходит передача информации, и система управления соответствующей тележкой 2 передает информацию об отклонении тележки от заданных параметров и получает информацию об управляющих параметрах, что позволяет оптимизировать движение тележки. 7 з.п. ф-лы, 4 ил.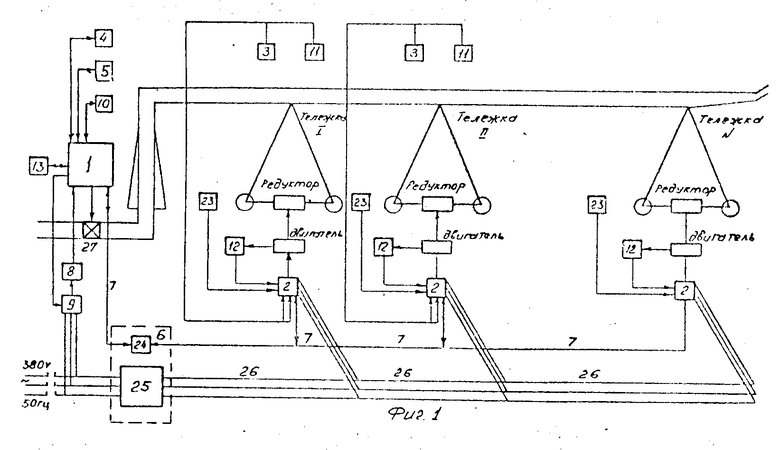
| Проспект "Дождевальная электрифицированная машина Кубань ЛК", 1986. |
