Изобретение относится к метеорологии, может быть использовано для дистанционного определения фазового состояния облаков и туманов, а также микроструктуры капельных сред.
Известны способы определения фазового состояния и микроструктуры капельно-жидких сред по измеренным с помощью лидара профиля коэффициентов рассеяния и деполяризации.
Однако эти способы весьма трудоемки, точность определения фазового состояния и параметров распределения капель по размерам невелика из-за некорректного разделения потоков однократного и многократного рассеяния в эхо-сигналах лидара. При этом попытка установления связи параметров микроструктуры капельных сред с уровнем деполяризации, определяемой как отношение ортогональной компоненты к основной эхо-сигналов лидара, приводит к неоднозначной зависимости величины этого отношения от параметров распределения капель облаков и туманов по размерам.
Наиболее близким по технической сущности к предлагаемому является способ определения оптической плотности облаков и туманов, основанный на посылке и приеме линейно поляризованного излучения и последующего установления связи между временем запаздывания ортогональной компоненты относительно основной компоненты эхо-сигналов лидара и оптической плотностью этих сред.
Однако указанный способ не обеспечивает достоверности и точности определения фазового состояния и микроструктуры капельных облаков и туманов, так как в его основе используются алгоритмы обработки принятой информации, а также приемные и передающие каналы и блоки лидара, которые не позволяют выделить сигналы только от капельных сред. Это связано с тем, что степень деполяризации несет информацию как о несферичности частиц, так и об уровне многократного рассеяния в облачных средах. Невозможность разделения потоков однократного и многократного рассеяния в отраженном излучении лидара приводит к дополнительным неконтролируемым ошибкам при восстановлении профилей коэффициентов рассеяния и параметров распределения капель по размерам в них, а следовательно, и к ошибкам при определении водности капельных облаков и туманов только по степени деполяризации.
Целью изобретения является повышение точности и расширение функциональных возможностей лидарного метода за счет одновременного дополнительного определения распределения капель по размерам и оценки величины водности облаков.
В способе определения микроструктуры капельных облаков и туманов первоначально согласно изобретению дополнительно приемникам с углами поля зрения, превышающими углы поля зрения приемников для приема однократного рассеяния, выделяют сигналы многократного рассеяния, а затем с помощью сигнала однократного рассеяния восстанавливают профили коэффициентов рассеяния и определяют по соотношению сигналов многократного и однократного рассеяния деполяризационное соотношение. В свою очередь значения коэффициентов рассеяния, величины углов приема и деполяризационного отношения связывают эмпирическим соотношением с параметрами распределения частиц капельных сред по размерам, и по известным зависимостям рассчитывают водность и концентрацию частиц в капельножидких облаках и туманах.
Именно заявленный порядок преобразования выходного излучения ОКГ и соответствующий этому прием двумя различными по углу поля зрения приемниками, регистрация и обработка информации позволяют для кристаллических и смешанных облаков и туманов определить плотность, а согласно способу для капельно-жидких сред дополнительно определять их микроструктуру и тем самым достигать цели изобретения.
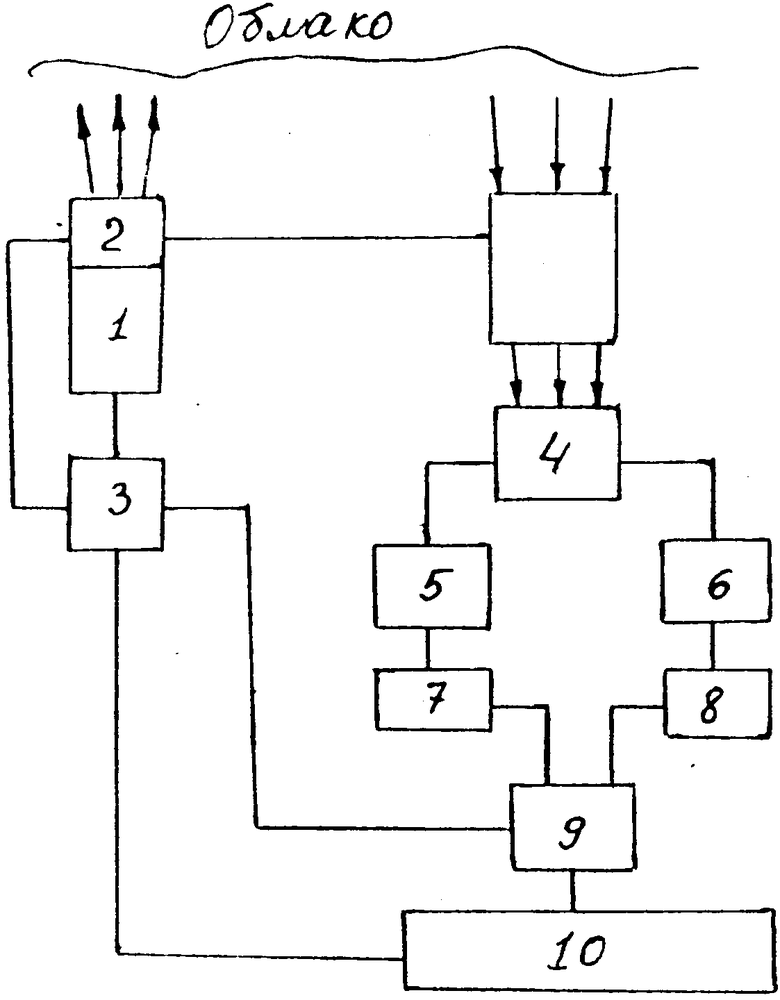
Способ поясняется чертежом, на котором изображена схема устройства для реализации способа. Устройство содержит импульсный источник 1 линейно поляризованного излучения, блок 2 поворота плоскости поляризации, блок 3 управления с опорным каналом, поляризационный линейный анализатор 4, фотоприемники 5 и 6 с усилителями 7 и 8, блок 9 разности сигналов и блок 10 регистрации. Блок 3 управления и опорного сигнала подключен к источнику 1 излучения, блоку 2 поворота плоскости поляризации, к блоку 9 разности сигналов, к фотоприемникам 5 и 6 и к блоку 10 регистрации. Блок 9 разности сигналов установлен на выходе усилителей 7 и 8 и связан с источником 1 излучения, блоком 3 управления и с блоком 10 регистрации. В блоке управления опорным каналом часть циркулярно поляризованного излучения ОКГ подается на входы фотоприемников 5 и 6.
Перед фотоприемниками 5 и 6 установлен поляризационный линейный анализатор 4, согласованный в основной плоскости поляризации с выходным излучением, который позволяет поочередно направлять основную или ортогональную компоненту на соответствующий приемник в зависимости от положения плоскости поляризации излучателя.
Фотоприемники 5 и 6 установлены так, что угол поля зрения ϕ1фотоприемника 5 целиком охватывает зондирующий световой пучок, а угол поля ϕ2 приемника 6 примерно в два раза больше угла поля зрения приемника 5, и охватывает его концентрично. Фотоприемники 5 и 6 через усилители 7 и 8 соединены с блоком 9 разности сигналов и блоком 10 регистрации. Выход блока разности сигналов подключен к блоку 3 управления и блоку 10 регистрации.
Предлагаемый способ осуществляется следующим образом.
При посылке выходного излучения вертикально поляризованное излучение направляется на исследуемый объект, и фотоприемник 5 принимает основную компоненту эхо-сигнала лидара с углом поля зрения ϕ1, а приемник 6 принимает ортогональную компоненту эхо-сигнала лидара с углом поля зрения ϕ2. Эти сигналы через усилители 7 и 8 поступают на блок 9 разностных сигналов и в блок 10 регистрации, где запоминаются до следующей посылки излучения.
При следующей посылке по команде с блоком 10 регистрации через блок 3 управления с помощью блока 2 поворота плоскости поляризации устанавливается фазовая пластинка, и горизонтально поляризованное излучение направляется в тот же объем исследуемой среды, и приемником 5 принимается ортогональная, а приемником 6 - основная компоненты эхо-сигналов. В блоке разностных сигналов и блоке регистрации первая и вторая серия сигналов проходят обработку для определения фазового состояния облаков.
Для чисто капельных сред информация проходит дальнейшую обработку. Сигналы с приемников 5 и 6 нормируются на величину опорного сигнала, и далее с помощью ортогональных сигналов проводится компенсация фоновой компоненты Iф в сигнале основной компоненты (Iодн + Iф)
(Iодн + I1ф) - I2ф·N = Iодн, (1) где N - поправочный коэффициент;
Ioдн - сигнал однократного рассеяния. По известному способу восстанавливается профиль коэффициента рассеяния в среде.
σ (H) = Iодн (Zi)·K1, (2) где К1 - известный коэффициент. С помощью сигнала однократного рассеяния Iодн и сигналов, обусловленных только многократным рассеянием Iмн = (I - I
- I  определяется деполяризационное соотношение
определяется деполяризационное соотношение
δπ = Iмн/Iодн, (3) где I - сигнал, обусловленный многократным и однократным рассеянием, и на их основе рассчитывается значение эффективного модального радиуса капель в исследуемом объеме
- сигнал, обусловленный многократным и однократным рассеянием, и на их основе рассчитывается значение эффективного модального радиуса капель в исследуемом объеме
rм =  , (4) где К2 = 10±2 - постоянный эмпирически определяемый коэффициент, a RH
, (4) где К2 = 10±2 - постоянный эмпирически определяемый коэффициент, a RH = H˙tgϕ - параметр объема принимаемого приемником с угловым полем ϕ на расстоянии H от лидара.
= H˙tgϕ - параметр объема принимаемого приемником с угловым полем ϕ на расстоянии H от лидара.
В соответствии с известными формулами (1) и на основе вышеприведенных данных определяется профиль водности и концентрации частиц в капельно-жидких средах
WK(H) = σ(H) ˙ rм ˙ ρo ; (5)
N(H) =  (6)
(6)
Использование предлагаемого способа определения микроструктуры капельных облаков и туманов позволяет по сравнению с известными резко повысить точность определения фазового состояния и оптической плотности облаков и туманов по измеренным профилям коэффициентов рассеяния и деполяризационного отношения, а также расширить функциональные возможности лидарного метода за счет восстановления параметров микроструктуры капельных сред на основе полученного эмпирического соотношения. Одновременно с этим тщательный учет и разделение потоков однократного и многократного рассеяния в эхо-сигналах лидара значительно повышает точность определения микроструктуры облаков и туманов и тем самым увеличивает производительность лидарного метода и аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВИДИМОСТИ И МИКРОСТРУКТУРЫ АТМОСФЕРНЫХ ОБРАЗОВАНИЙ | 1996 |
|
RU2110082C1 |
| УСТРОЙСТВО ДЛЯ РАССЕЯНИЯ ТУМАНА | 1999 |
|
RU2174301C2 |
| УСТРОЙСТВО ДЛЯ РАССЕЯНИЯ ТУМАНА | 1999 |
|
RU2164367C2 |
| УСТРОЙСТВО ДЛЯ РАССЕЯНИЯ ТУМАНА | 1999 |
|
RU2164062C2 |
| СПОСОБ РАССЕЯНИЯ ТЕПЛЫХ ТУМАНОВ НА АВТОМАГИСТРАЛИ | 1999 |
|
RU2164366C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСНОВНЫХ ПАРАМЕТРОВ СТРУКТУРЫ ВОЗДУШНО-КАПЕЛЬНЫХ ОБРАЗОВАНИЙ ОБЛАКОВ И ТУМАНОВ | 2020 |
|
RU2758843C1 |
| УСТРОЙСТВО ДЛЯ РАССЕЯНИЯ ТУМАНА | 1999 |
|
RU2164368C2 |
| УСТРОЙСТВО ДЛЯ РАССЕЯНИЯ ТУМАНА НА НАДВОДНЫХ ОБЪЕКТАХ | 2001 |
|
RU2214086C2 |
| УСТРОЙСТВО ДЛЯ ПРОСВЕТЛЕНИЯ ТУМАНА НА НАДВОДНЫХ ОБЪЕКТАХ | 2001 |
|
RU2214085C2 |
| СПОСОБ ВОЗДЕЙСТВИЯ НА ГРАДООПАСНЫЕ ОБЛАКА | 1985 |
|
RU1427613C |
Область использования: в метеорологии, для дистанционного определения оптической плотности, водности, концентрации и размера частиц в капельных облаках и туманах. Сущность изобретения: в среду последовательно посылают зондирующие импульсы линейнополяризованного излучения со взаимно перпендикулярными плоскостями поляризации. Принимают основную и ортогональную компоненты отраженного излучения, обусловленного однократным рассеиванием. Дополнительно принимают отраженное излучение при углах поля зрения приемника излучения, превышающих угол поля зрения при приеме однократного рассеяния. Из дополнительно принятого излучения исключают часть, обусловленную однократным рассеянием. Оставшуюся часть, обусловленную только многократным рассеянием, используют для оценки распределения капель по размерам и водности среды. 1 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ МИКРОСТРУКТУРЫ КАПЕЛЬНЫХ ОБЛАКОВ И ТУМАНОВ, заключающийся в том, что в среду последовательно посылают зондирующие импульсы линейно поляризованного излучения со взаимно перпендикулярными плоскостями поляризации, поочередно принимают приемником излучения основную и ортогональную компоненты отраженного излучения каждого из импульсов, выделяют излучение, обусловленное однократным рассеянием, определяют профили степени деполяризации и величины коэффициента обратного рассеяния, по которым судят о фазовом состоянии облаков и туманов, отличающийся тем, что, с целью повышения точности и расширения функциональных возможностей за счет одновременного дополнительного определения распределения капель по размерам и оценки величины водности облаков, дополнительно проводят прием отраженного излучения при углах поля зрения приемника излучения, превышающих угол поля зрения при приеме излучения, обусловленного однократным рассеянием, из дополнительно принятого отраженного излучения исключают часть, обусловленную однократным рассеянием и по профилю степени делоляризации части излучения, обусловленного многократным рассеянием судят о распределении капель по размерам, по которому оценивают водность облаков.
| Устройство для дистанционного определения фазового состояния облаков | 1984 |
|
SU1474571A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
