сл
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр-кубик Моррисона | 1990 |
|
SU1781617A1 |
| Акселерометр-кубик Моррисона | 1990 |
|
SU1788470A1 |
| Акселерометр-кубик Моррисона | 1990 |
|
SU1781616A1 |
| Устройство для измерений мгновенных угловых перемещений качающейся платформы | 2016 |
|
RU2642975C2 |
| Фотоэлектрический преобразователь перемещений | 1982 |
|
SU1043491A2 |
| Фотоэлектрический преобразователь положения в код | 1981 |
|
SU1040503A1 |
| Фотоэлектрический преобразователь перемещений | 1980 |
|
SU960528A1 |
| Устройство для определения параметров атмосферы | 1989 |
|
SU1746349A1 |
| ОПТИКО-МЕХАНИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2282139C2 |
| Преобразователь угла отклонения светового луча в код | 1982 |
|
SU1053125A1 |
Использование: приборостроение, измерение угловых и линейных ускорений. Сущность изобретения: акселерометр-кубик Моррисона содержит корпус 1. Внутри него в жидкости 3 расположен инерционный элемент 2. Акселерометр на каждой грани имеет датчик перемещений и исполнительный орган 9. связанные между собой через усилитель-преобразователь 8 и вычислительный блок 7. Каждый датчик перемещения выполнен в виде фотоэлектрического преобразователяГ содержащего источник света 4 и теневую маску 5, размещенные на каждой грани инерционного элемента 2. Напротив них на соответствующей грани корпуса расположена линейка 6 приборов с зарядовой связью, сигнал с которой передается в усилитель-преобразователь 8. 2 ил.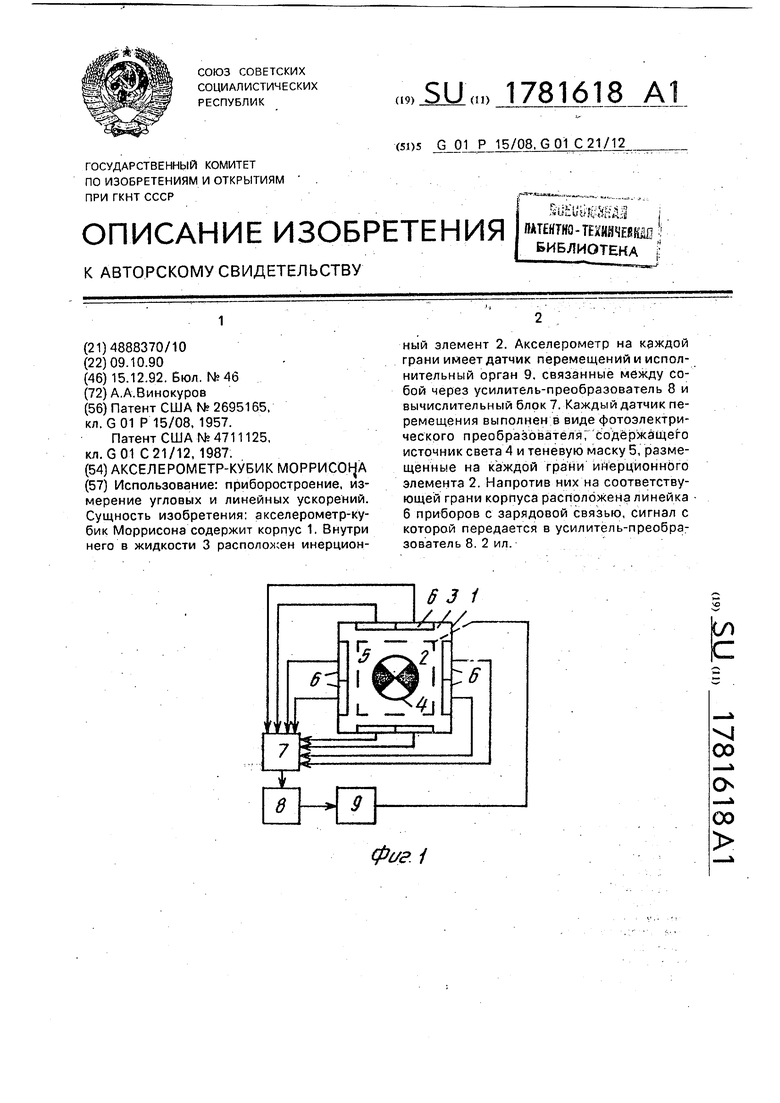
фиг. 1
-ч
00
(
00
Изобретение относится к измерительной технике, а более конкретно к измерителям углового и линейного ускорения.
Известен угловой акселерометр, содержащий маховик, установленный на оси, совпадающей по направлению с чувствительной осью, а также индукцион ный датчик угла и датчик момента. Недостатками известного акселерометра является низкая точность вследствие индукционного съема информации, а также низкие функциональные возможности вследствие измерения только углового ускорения и относительно всего лишь одной оси.
Известен фотоэлектрической преобразователь перемещений, содержащий установленные на подвижном объекте источник света и теневую маску с двумя равновеликими окнами, а также установленный отдельно и оптически связанный с источником света фотопотенциомэтр, Недостатками известного преобразователя являются низкая точность и сложность согласования с цифровыми вычислительными средствами вследствие использования фотоприемника с аналоговым выходом.
Известен трехкомпонентный акселерометр с кубической крестообразной инерционной массой с оптоэлектронным датчиком положения и электромагнитным датчиком момента. Недостатком данного акселерометра являются низкие функциональные возможности вследствие измерения только трех параметров движения.
Наиболее близким по технической сущности к предложенному изобретению является кубок Моррисона, содержащий корпус, инерционный элемент в нем, жидкость в зазоре между корпусом и инерционным элементом, емкостные датчики перемещения и электромагнитные исполнительные органы, а также усилитель-преобразователь, электрически включенный между ними. Недостатком данного устройства является низкая точность вследствие емкостного способа съема информации о положении инерционного элемента относительно корпуса.
Целью изобретения является повышение точности.
Поставленная цель достигается тем, что е акселерометре-кубике Моррисона, содержащем корпус и расположенный в нем инерционный элемент, жидкость в зазоре между корпусом и инерционным элементом, расположенные по трем ортогональным осям датчики перемещения и исполнительные органы, между которыми включен усилитель-преобразователь, датчики перемещения выполнены в виде фотоэлектрических преобразователей, состоящих из установленных на каждой грани инерционного элемента двух источников 5 света и теневой маски с двумя равновеликими окнами, а также установленной на каждой внутренней грани корпуса линейки приборов с зарядовой связью, а между выходами всех линеек и входом усилителя0 преобразователя включен вычислительный блок. ,,;
Сущность изобретения заключается в следующем. Свет от одного источника проходит через теневые маски каждой грани
5 инерционного элемента и попадает на линейки приборов с зарядовой связью, размещенные на каждой внутренней грани корпуса. По выходному сигналу с линеек приборов с зарядовой связью каждой грани
0 вычислительный блок определяет общее смещение инерционного элемента и необходимое воздействие для его возвращения исполнительными органами в нулевое положение.
5 Использование источника света, теневых масок и фотопотенциометров известно, например в фотоэлектрическом преобразователе перемещений 2. Использование линеек приборов с зарядовой связью также
0 известно. Однако их совокупное использование в кубике Моррисона не известно, что подтверждает проведенный патентный поиск. Таким образом, использование в предложенном кубике Моррисона совокупности
5 известных в отдельности признаков приводит к новому качеству, проявившемуся в положительном эффекте - повышении точности - в связи с чем изобретение обладает существенными отличиями.
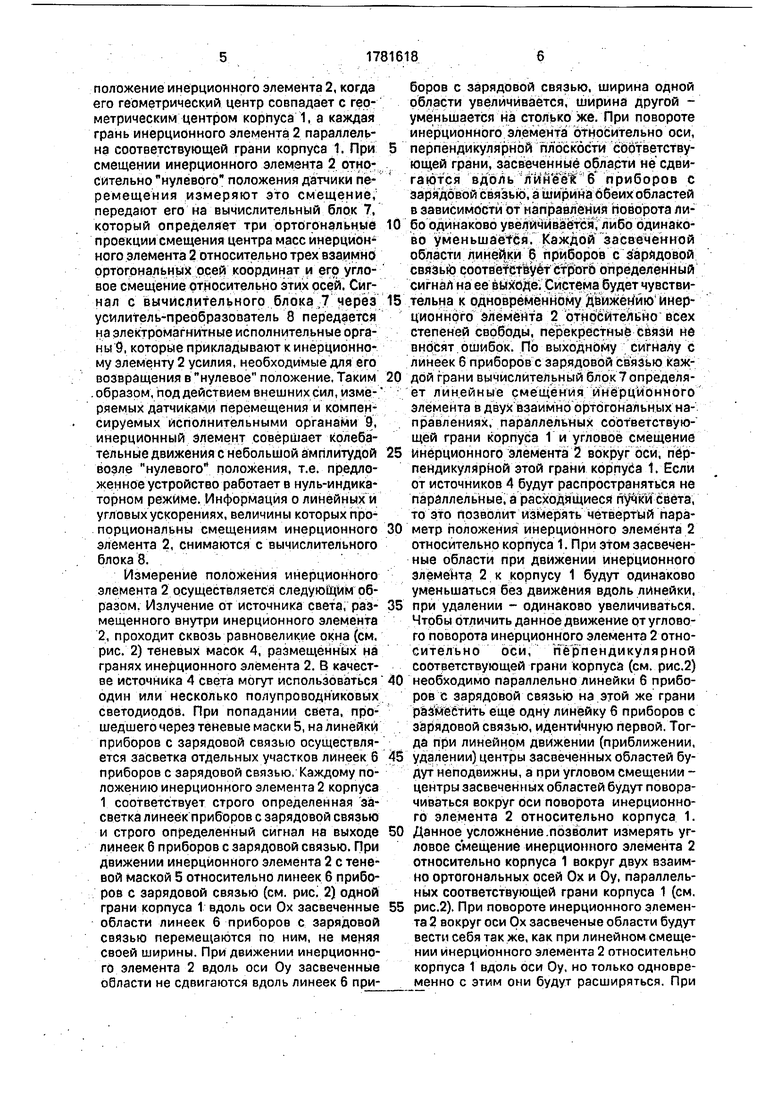
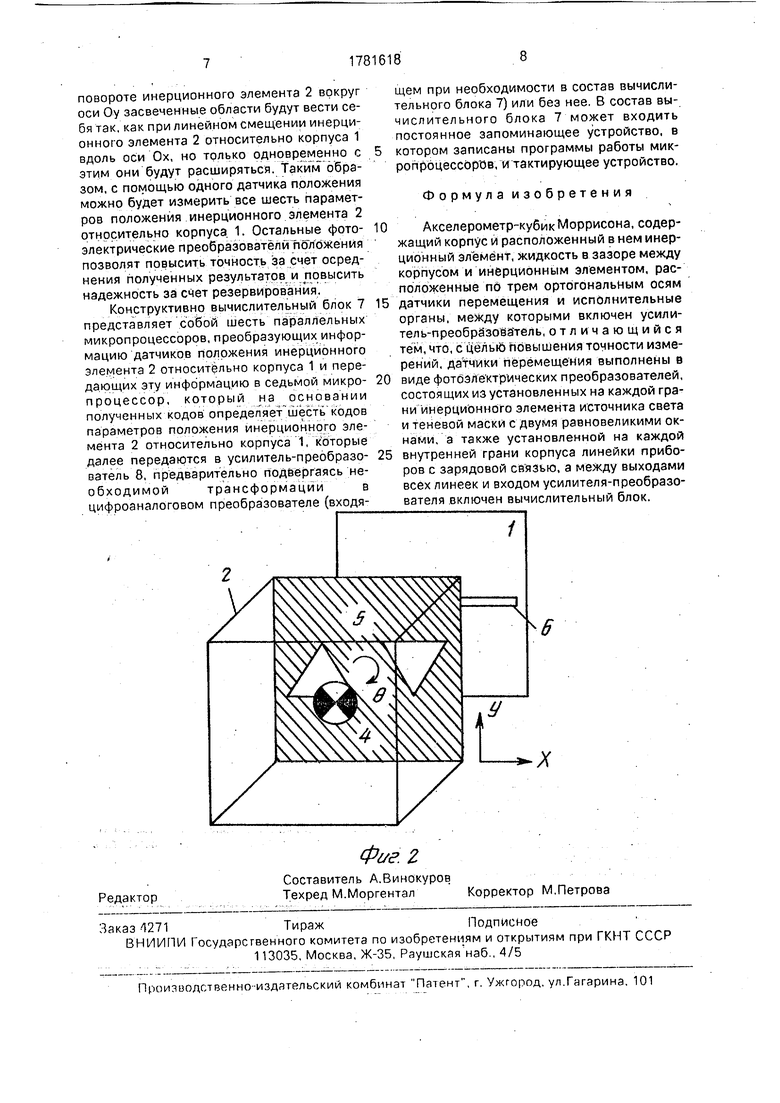
0 На фиг.1 изображена функциональная схема предложенного акселерометра-кубика Моррисона; на фиг. 2 - схема взаимного расположения источника света, теневых масок и линеек приборов с зарядовой связью.
5 Акселерометр-кубик Моррисона содержит корпус 1, инерционный элемент 2 в нем, жидкость 3 в зазоре между ними, источники света 4, теневые маски 5, линейки 6 приборов с зарядовой связью, вычислительный
0 блок 7, усилитель-преобразователь 8 и электромагнитные исполнительные органы 9.
Акселерометр - кубик Моррисона работает следующим образом.
Инерционный элемент 2, связанный с
5 корпусом 1 только вязким трением жидкости 3, стремится сохранить свое положение неизменным винерциальном пространстве. Поэтому при движении корпуса 1 инерционный элемент 2 смещается относител ьно ну- левого положения, за которое принимается
положение инерционного элемента 2, когда его геометрический центр совпадает с геометрическим центром корпуса 1, а каждая грань инерционного элемента 2 параллельна соответствующей грани корпуса 1. При смещении инерционного элемента 2 относительно нулевого положения датчики перемещения измеряют это смещение, передают его на вычислительный блок 7, который определяет три ортогональные проекции смещения центра масс инерционного элемента 2 относительно трех взаимно ортогональных осей координат и его угловое смещение относительно этих осей. Сигнал с вычислительного блока,7 через усилитель-преобразователь 8 передается на электромагнитные исполнительные органы 9, которые прикладывают к инерционному элементу 2 усилия, необходимые для его возвращения в нулевое положение, Таким образом, под действием внешних сил, изме- ряемых датчиками перемещения и компенсируемых исполнительными органами 9, инерционный элемент совершает колебательные движения с небольшой амплитудой возле нулевого положения, т.е. предложенное устройство работает в нуль-индикаторном режиме. Информация о линейных и угловых ускорениях, величины которых пропорциональны смещениям инерционного элемента 2, снимаются с вычислительного блока 8.
Измерение положения инерционного элемента 2 осуществляется следующим образом. Излучение от источника света, размещенного внутри инерционного элемента 2, проходит сквозь равновеликие окна (см. рис. 2) теневых масок 4, размещенных на гранях инерционного элемента 2. В качестве источника 4 света могут использоваться один или несколько полупроводниковых светодиодов. При попадании света, прошедшего через теневые маски 5, на линейки приборов с зарядовой связью осуществляется засветка отдельных участков линеек 6 приборов с зарядовой связью Каждому положению инерционного элемента 2 корпуса 1 соответствует строго определенная засветка линеек приборов с зарядовой связью и строго определенный сигнал на выходе линеек б приборов с зарядовой связью. При движении инерционного элемента 2 с теневой маской 5 относительно линеек б приборов с зарядовой связью (см. рис. 2) одной грани корпуса 1 вдоль оси Ох засвеченные области линеек 6 приборов с зарядовой связью перемещаются по ним, не меняя своей ширины. При движении инерционного элемента 2 вдоль оси Оу засвеченные области не сдвигаются вдоль линеек 6 приборов с зарядовой связью, ширина одной области увеличивается, ширина другой - уменьшается на столько же. При повороте инерционного элемента относительно оси,
перпендикулярной плоскости соответствующей грани, засвеченные области не сдвигаются вдоль 6 приборов с зарядовой связью, а ширина обеих областей в зависимости от направления поворота ли0 бо одинаково увеличивается, либо одинаково уменьшается. Каждой засвеченной области линейки б приборов с зарядовой связью соответствует строго определенный сигнал на ее выходе. Система будет чувстви5 тельна к одновременному движению инерционного элемента 2 относительно всех степеней свободы, перекрестные связи не вносят ошибок. По выходному сигналу с линеек б приборов с зарядовой связью каж0 дои грани вычислительный блок 7 определяет линейные смещения инерционного элемента в двух взаимно ортогональных направлениях, параллельных соответствующей грани корпуса 1 и угловое смещение
5 инерционного элемента 2 вокруг оси, перпендикулярной этой грани корпуса 1. Если от источников 4 будут распространяться не параллельные, а расходящиеся пучки света, то это позволит измерять четвертый пара0 метр положения инерционного элемента 2 относительно корпуса 1. При этом засвеченные области при движении инерционного элемента 2 к корпусу 1 будут одинаково уменьшаться без движения вдоль линейки,
5 при удалении - одинаково увеличиваться. Чтобы отличить данное движение от углового поворота инерционного элемента 2 отно- сительно оси, перпендикулярной соответствующей грани корпуса (см. рис.2)
0 необходимо параллельно линейки б приборов с зарядовой связью на этой же грани разместить еще одну линейку б приборов с зарядовой связью, идентичную первой. Тогда при линейном движении (приближении,
5 удалении) центры засвеченных областей будут неподвижны, а при угловом смещении - центры засвеченных областей будут поворачиваться вокруг оси поворота инерционного элемента 2 относительно корпуса 1.
0 Данное усложнение позволит измерять угловое смещение инерционного элемента 2 относительно корпуса 1 вокруг двух взаимно ортогональных осей Ох и Оу, параллельных соответствующей грани корпуса 1 (см.
5 рис.2). При повороте инерционного элемента 2 вокруг оси Ох засвеченые области будут вести себя так же, как при линейном смещении инерционного элемента 2 относительно корпуса 1 вдоль оси Оу, но только одновременно с этим они будут расширяться. При
повороте инерционного элемента 2 вокруг оси Оу засвеченные области будут вести себя так, как при линейном смещении инерционного элемента 2 относительно корпуса 1 вдоль оси Ох, но только одновременно с этим они будут расширяться. Таким образом, с помощью одного датчика положения можно будет измерить все шесть параметров положения инерционного элемента 2 относительно корпуса 1. Остальные фотоэлектрические преобразователи положения позволят повысить точность за счет осреднения полученных результатов и повысить надежность за счет резервирования.
Конструктивно вычислительный блок 7 представляет собой шесть параллельных микропроцессоров, преобразующих информацию датчиков положения инерционного элемента 2 относительно корпуса 1 и передающих эту информацию в седьмой микро- процессор, который на основании полученных кодов опредепяет шесть кодов параметров положения инерционного элемента 2 относительно корпуса 1, которые далее передаются в усилитель-преобразователь 8, предварительно подвергаясь необходимойтрансформациивцифроаналоговом преобразователе (входящем при необходимости в состав вычислительного блока 7) или без нее. В состав вычислительного блока 7 может входить постоянное запоминающее устройство, в котором записаны программы работы микропроцессоров, и тактирующее устройство.
Формула изобретения
0 Акселерометр-кубик Моррисона, содержащий корпус и расположенный в нем инерционный элемент, жидкость в зазоре между корпусом и инерционным элементом, расположенные по трем ортогональным осям
5 датчики перемещения и исполнительные органы, между которыми включен усили- тель-преобра зователь, отличающийся тем, что, с целью повышения точности измерений, датчики перемещения выполнены в
0 виде фотоэлектрических преобразователей, состоящих из установленных на каждой грани инерционного элемента источника света и теневой маски с двумя равновеликими окнами, а также установленной на каждой
5 внутренней грани корпуса линейки приборов с зарядовой связью, а между выходами всех линеек и входом усилителя-преобразователя включен вычислительный блок.
| Устройство для аккумулирования сжатого воздуха | 2018 |
|
RU2695165C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США №4711125, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
