ел С
Изобретение относится к измерительной технике, а более конкретно к измерителям углового и линейного ускорения.
Известен угловой акселерометр, содержащий маховик, установленный на оси, совпадающей по направлению с чувствительной осью, а также индукционный датчик угла и датчик момента. Недостатками известного акселерометра являются низкая точность вследствие индукционного съема информации, а также низкие функциональные возможности вследствиеи Мё ён ия тол-Jko углового ускорения и относительно всего лишь одной оси.
Известны различные виды однокомпо- нентных акселерометров, предназначенных для измерения кажущихся линейных ускорений подвижных объектов. Среди этих акселерометров имеются такие, у которых чувствительная масса взвешена в жидкости. Для решения задач управления небходимо иметь не менее трех акселерометров , что увеличивает габариты и массу измерительного блока. Другим недостатком указанных акселерометров является низкая точность вследствие индукционного или емкостного съема информации о положении чувствительной массы. Известен трехкомпонент- ный акселерометр с кубической крестообразной инерционной массой с оп- тоэлектронным датчиком положения и электромагнитным датчиком момента. Недостатком данного акселерометра являются низкие функциональные возможности вследствие измерения только трех параметров движения.
Наиболее близким по технической сущности и предложенному изобретению явля- ется кубик Моррисона, содержащий корпус, инерционный элемент в нем, жидкость в зазоре между корпусом и инерционным элементом, емкостные датчики перемещения и элеткромагнитные исполнительные органы, а также усилитель-преобразователь, электрически включенный между ними, Недостатком данного устройства является низкая точность вследствие емкостного способа съема информации о положении инерционного элемента относительно корпуса.
Целью изобретения является повыше- ние точности.
Поставленная цель достигается тем, что в акселерометре-кубике Моррисона, содержащем корпус и расположенный в нем инерционный элемент, жидкость в зазоре между корпусом и инерционным элементом, расположенные по трем ортогональным осям датчики перемещения и исполнительные органы, между которыми включен усилитель-преобразователь, датчики перемещения выполнены в виде фотоэлектрических преобразователей, состоящих из расположенных на инерционном элементе источника излучения с шестью оптическими
осями и зеркал вДоль этих осей, а также расположенных на каждой грани корпуса вдоль тех же оптических осей матриц приборов с зарядовой связью, а между усилителем-преобразователем и исполнительными органами
включен вычислительный блок.
Сущность изобретения заключается в следующем. Из геометрического центра каждой грани инерционного элемента, имеющего форму кубика, выходит луч, перпендикулярный его грани, в направлении соответствующей грани корпуса, на каждой из которых установлена матрица приборов- с зарядовой связью. По шести парам координат точек падения лучей источника на
матрицы приборов с зарядовой связью шести граней корпуса вычислительный блок определяет линейные смещения кубика Моррисона вдоль трех взаимно ортогональных осей и угловые смещения относительно
трех взаимно ортогональных осей,
Использование источников излучения, светоделителей, зеркал, матриц приборов с зарядовой связью и вычислительного блока в технике известны. Однако использование
указанных элементов в универсальных инерциональных измерительных блоках типа кубика Моррисона не известно, о чем свидетельствует проведенный патентный поиск. Таким образом,использование в
предложенном кубике Моррисона известных в отдельности признаков приводит к новому качеству, проявившемуся в положительном эффекте - повышение точности, - в связи с чем изобретение обладает существенными отличиями.
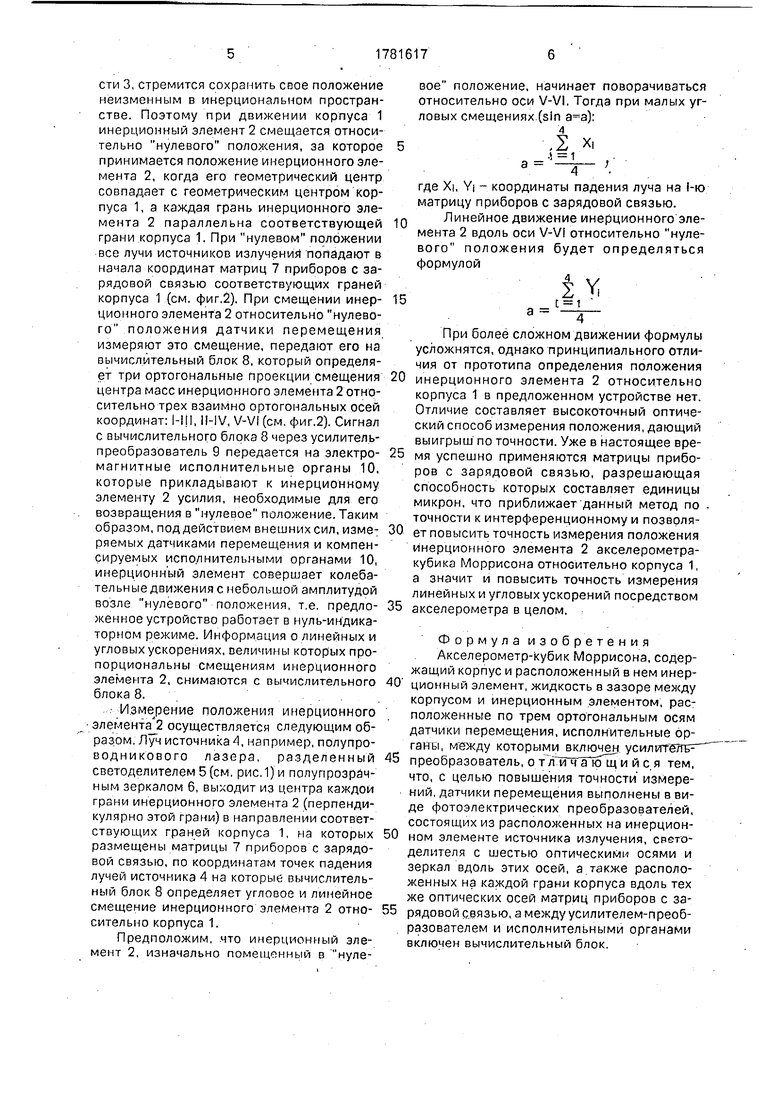
На фиг. 1 изображена функциональная схема предложенного акселерометра; на фиг. 2 - схема размещения осей координат матриц приборов с зарядовой связью корпуса устройства.
Акселерометр-куб}1к Моррисона содержит корпус 1, инерционный элемент 2, жидкость 3 в зазоре между корпусом 1 и инерционным элементом 2, источник излучения 4, светоделитель 5, полупрозрачное зеркало 6, матрицы 7 приборов с зарядовой связью, связанные электрически с вычислительным блоком 8, усилителем-преобразователем 9 и электромагнитными исполнительными органами 10,
Акселерометр-кубик Моррисона работает следующим образом.
Инерционный элемент 2, связанный с корпусом 1 только вязким трением жидкости 3, стремится сохранить свое положение неизменным в инерциональном пространстве. Поэтому при движении корпуса 1 инерционный элемент 2 смещается относительно нулевого положения, за которое принимается положение инерционного элемента 2, когда его геометрический центр совпадает с геометрическим центром корпуса 1, а каждая грань инерционного элемента 2 параллельна соответствующей грани корпуса 1. При нулевом положении все лучи источников излучения попадают в начала координат матриц 7 приборов с зарядовой связью соответствующих граней корпуса 1 (см. фиг.2), При смещении инерционного элемента 2 относительно нулевого положения датчики перемещения измеряют это смещение, передают его на вычислительный блок 8, который определяет три ортогональные проекции смещения центра масс инерционного элемента 2 относительно трех взаимно ортогональных осей координат: l-lll, II-IV, V-VI (см. фиг.2). Сигнал с вычислительного блока 8 через усилитель- преобразователь 9 передается на электромагнитные исполнительные органы 10, которые прикладывают к инерционному элементу 2 усилия, необходимые для его возвращения в нулевое положение. Таким образом, под действием внешних сил, измеряемых датчиками перемещения и компенсируемых исполнительными органами 10, инерционный элемент совершает колебательные движения с небольшой амплитудой возле нулевого положения, т е. предложенное устройство работает в нуль-индикаторном режиме. Информация о линейных и угловых ускорениях, величины которых пропорциональны смещениям инерционного элемента 2, снимаются с вычислительного блока 8.
Измерение положения инерционного элемента 2 осуществляется следующим образом. Луч источника А, например, полупро- водникового лазера, разделенный светоделителем 5 (см, рис.1) и полупрозрачным зеркалом 6, выходит из центра каждой грани инерционного элемента 2 (перпендикулярно этой грани) в направлении соответствующих граней корпуса 1, на которых размещены матрицы 7 приборов с зарядовой связью, по координатам точек падения лучей источника 4 на которые вычислительный блок 8 определяет угловое и линейное смещение инерционного элемента 2 относительно корпуса 1.
Предположим, что инерционный элемент 2, изначально помещенный в нулевое положение, начинает поворачиваться относительно оси V-VI. Тогда при малых угловых смещениях (sin ):
,1 Xl
.
где Xi, YI - координаты падения луча на 1-ю матрицу приборов с зарядовой связью. Линейное движение инерционного элемента 2 вдоль оси V-VI относительно нулевого положения будет определяться формулой
iY
- 1
а
При более сложном движении формулы усложнятся, однако принципиального отличия от прототипа определения положения
инерционного элемента 2 относительно корпуса 1 в предложенном устройстве нет. Отличие составляет высокоточный оптический способ измерения положения, дающий выигрыш по точности. Уже в настоящее время успешно применяются матрицы приборов с зарядовой связью, разрешающая способность которых составляет единицы микрон, что приближает данный метод по . точности к интерференционному и позволяет повысить точность измерения положения инерционного элемента 2 акселерометра- кубика Моррисона относительно корпуса 1, а значит и повысить точность измерения линейных и угловых ускорений посредством
акселерометра в целом.
Формула изобретения Акселерометр-кубик Моррисона, содержащий корпус и расположенный в нем инерционный элемент, жидкость в зазоре между корпусом и инерционным элементом, расположенные по трем ортогональным осям датчики перемещения, исполнительные органы, между которыми включен усилитетгь 1 преобразователь, отличающийся тем, что, с целью повышения точности измерений, датчики перемещения выполнены в виде фотоэлектрических преобразователей, состоящих из расположенных на инерционном элементе источника излучения, CPSTO- делителя с шестью оптическими осями и зеркал вдоль этих осей, а также расположенных на каждой грани корпуса вдоль тех же оптических осей матриц приборов с зарядовой связью, а между усилителем-преобразователем и исполнительными органами включен вычислительный блок.
0
5
0
5
ж/
F
У- & I
Уs -Lx
& я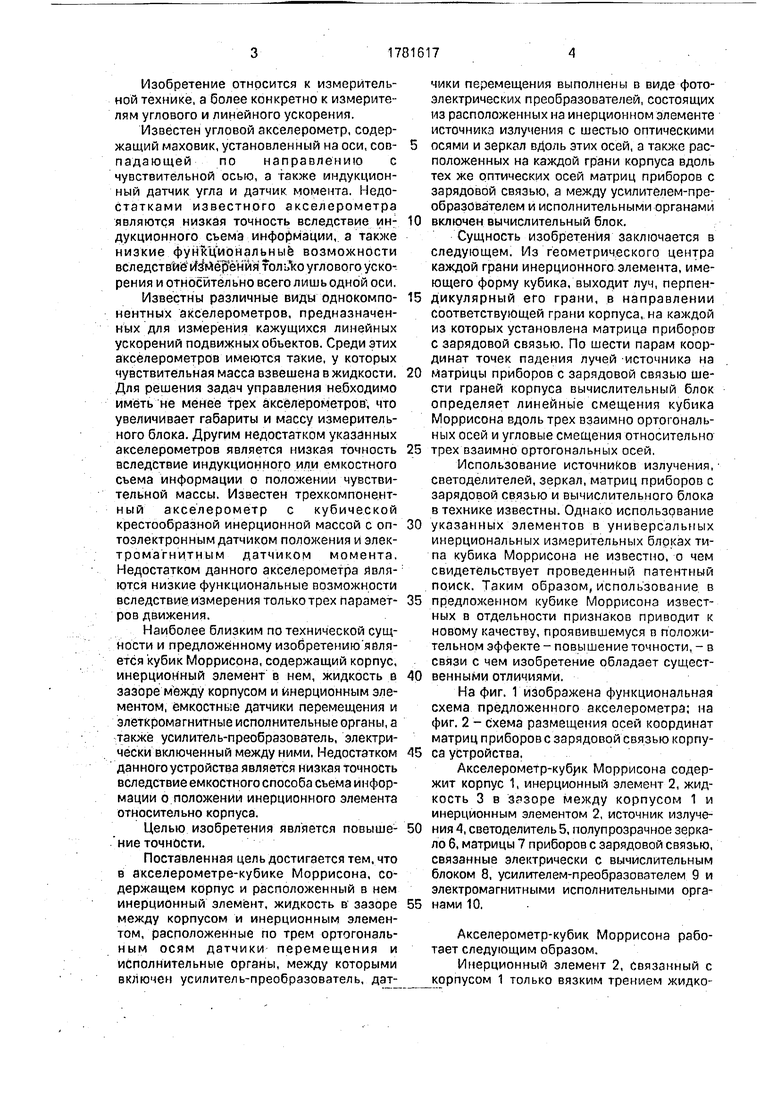
| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр-кубик Моррисона | 1990 |
|
SU1781618A1 |
| Акселерометр-кубик Моррисона | 1990 |
|
SU1788470A1 |
| Акселерометр-кубик Моррисона | 1990 |
|
SU1781616A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБОК ОРИЕНТАЦИИ ИЗМЕРИТЕЛЬНЫХ ОСЕЙ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2018 |
|
RU2683144C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2300079C1 |
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2006 |
|
RU2310166C1 |
| ЕДИНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК С ПРЕОБРАЗОВАТЕЛЯМИ НА ПОВЕРХНОСТНОЙ АКУСТИЧЕСКОЙ ВОЛНЕ | 1998 |
|
RU2134886C1 |
| КОМПЛЕКТ ЛАБОРАТОРНОГО ОБОРУДОВАНИЯ ДЛЯ ИЗУЧЕНИЯ ИЗБЫТОЧНОГО БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2024 |
|
RU2817519C1 |
| Канал стабилизации для трехосного гиростабилизатора | 1990 |
|
SU1820216A1 |
Использование: приборостроение, измерение линейных и угловых ускорений. Сущность изобретения: акселерометр-кубик Моррисона содержит корпус 1. Внутри него в жидкости 3 расположен инерционный элемент 2. Акселерометр на каждой грани имеет датчик перемещений и исполнительный орган 10, связанные между собой через усилитель-преобразователь 9 и вычислительный блок 8. Каждый датчик перемещений выполнен в виде фотоэлектрического преобразователя и содержит размещенные на инерционном элементе 2 по одной оптической оси источник излучения 4, светоделитель 5 и полупрозрачное зеркало 6. На каждой соответствующей грани корпуса 1 на той же оптической оси расположена матрица 7 приборов с зарядовой связью, сигнал с которой поступает на вычислительный блок 8. 2 ил.
Ф& 2
| Устройство для аккумулирования сжатого воздуха | 2018 |
|
RU2695165C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4711125, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
