Изобретение относится к области приборостроения и может быть использовано при одновременном измерении натяжения и скорости движения магнитной ленты с высокой точностью, например, в аппаратуре магнитной записи.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство для измерения натяжения ленты, содержащее высоковольтный источник напряжения, к полюсам которого подсоединены подвижный электрод и через ограничительный резистор и направляющий ролик магнитная лента, регистрирующее устройство, подвижную систему, выполненную в виде валика, имеющего возможность поворот; вокруг продольной оси, с закрепленным на нем коромыслом, магнитоэлектрический преобразователь, состоящий из постоянного магнита, жестко связанного с валиком, и обмоток обратной связи, закрепленных на корпусе у противоположных полюсов постоянного магнита: стабилизированный источник тока, подключенный к обмоткам обратной связи через ключевой элемент, управляющий вход которого подключен к датчику положения подвижной системы: при этом подвижный электрод выполнен в виде закрепленной на коромысле пластины, расположенной параллельно плоскости движения магнитной ленты, а продольная ось подвижной системы расположена перпендикулярно к плоскости движения ленты. Подвижная система устройства совершает автоколебания, при этом подвижный электрод перемеЫ
щается в плоскости параллельной плоскости движения ленты При подаче разнопо- лярного напряжения на электрод и на ленту между ними возникает сила электростатического взаимодействия РЭс. которая оказывает демпфирующее воздействие на подвижную систему. Следовательно, при изменении натяжения ленты новое состояние равновесия системы лента-электрод устанавливается за счет изменения силы F и величины демпфирующего воздействия на подвижную систему, что, в свою очередь, приводит к изменению частоты автоколебаний. Таким образом, измеряя регистрирующим устройством частоту колебаний, получаем информацию о величине натяжения ленты.
Недостатком данного устройства является невозможность одновременного измерения натяжения и скорости движения магнитном ленты. Кроме того, устройство имеет низкие чувствительность и точность измерения вследствие того, что информация о силе натяжения ленты получается как косвенный результат выделения слабого приращения от большой величины, т.е. производится выделение из величины собственного демпфирования системы составляющей, пропорциональной изменению частоты автоколебаний подвижной системы, и по ней определяется значение силы натяжения.
Цель изобретения - расширение функциональных возможностей устройства за счет обеспечения измерения скорости движения магнитной ленты,а также увеличения точности и чувствительности.
Указанная цель достигается тем, что в устройство, содержащее высоковольтный источник напряжения, к полюсам которого подсоединены подвижный электрод и через ограничительный резистор и направляющий ролик магнитная лента, регистрирующее устройство, подвижную систему, выполненную в виде валика, установленного с возможностью поворота вокруг продольной оси с закрепленным на нем коромыслом, магнитоэлектрический преобразователь, состоящий из постоянного магнита, жестко связанного с валиком, и обмоток обратной связи, закрепленных на корпусе у противоположных полюсов постоянного магнита, стабипизированный источник тока, подключенный к обмоткам обратной связи через ключевой элемент, управляющий вход которого подключен к датчику положения подвижной системы, при этом подвижный электрод выполнен в виде закрепленной на коромысле пластины, расположенной параллельно плоскости движения магнитной ленты, в него сведены гене ратор высокой частоты и последовательно соединенные первый блок сравнения, реверсивный счетчик, цифроаналоговый преобразователь. второй блок сравнения счетчик импульсов и вычислительный блок, при этом вторые входы блоков сравнения подключены к выходам генератора высокой частоты, а выходы реверсивного счетчика и
0 вычислительного блока - к входам регистрирующего устройства причем направляющий ролик изолирован от корпуса, его образующая поверхность выполнена в виде то- копроводящего и изолированного секторов.
5 а продольная ось подвижной системы расположена параллельно плоскости движения магнитной ленты.
Данное устройство по сравнению с известным обеспечивает возможность одно0 временного измерения двух основных параметров движения ленты в лентопротяжном механизме1 ее скорости движения и силы натяжения; более высокую чувствительность устройства за счет обеспечения
5 перпендикулярности к плоскости движения подвижного электрода относительно нитной ленты и увеличения таким образом эффективной площади электростатического взаимодействия ленты и электрода, более
0 высокую точность измерения за счет, во- первых, использования компенсационного метода измерения, т.к при построении электромеханической измерительной сие темы, в которой входное воздействие ком5 пенсируется с помощью компенсиоующего преобразователя, находящегося в цепи обратной связи, по решность элементов прямой цепи уменьшается в К раз, где К- коэффициент преобразования контура:
0 во-вторых, величина натяжения определяется по изменению скважности колебаний подвижной системы а не магнитной ленгы, что приводит к отсутствию погрешности при измерении колебаний от неоднородностей
5 материала магнитной ленты
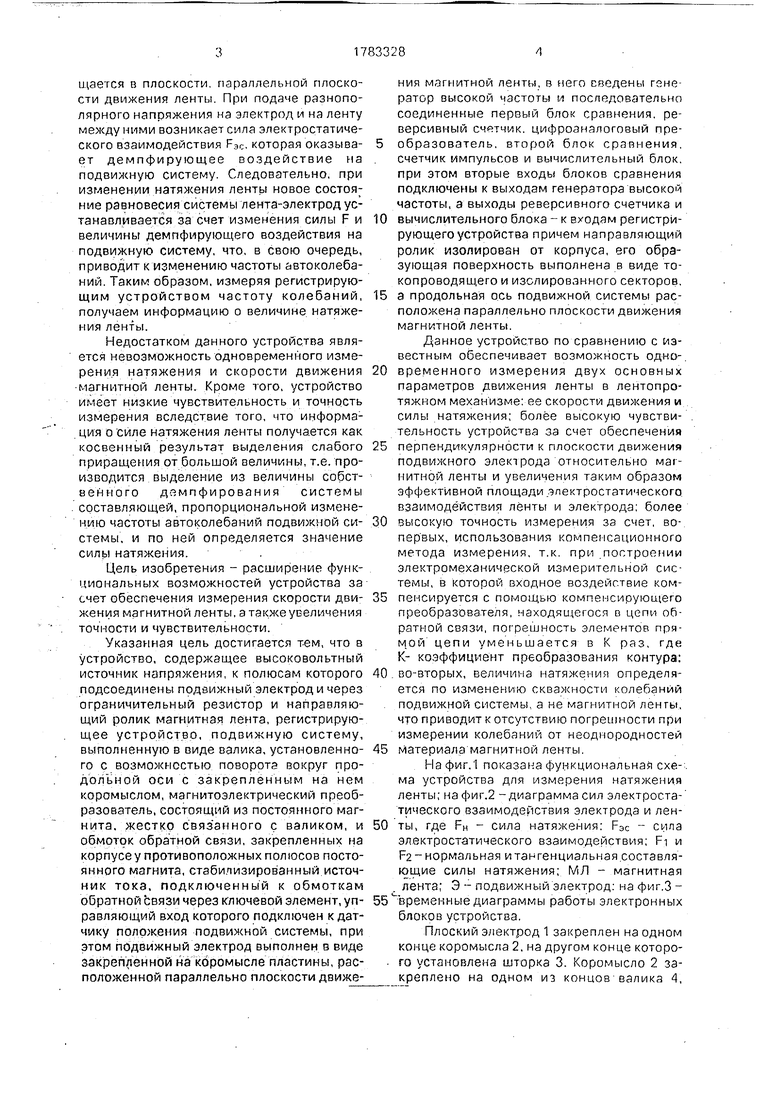
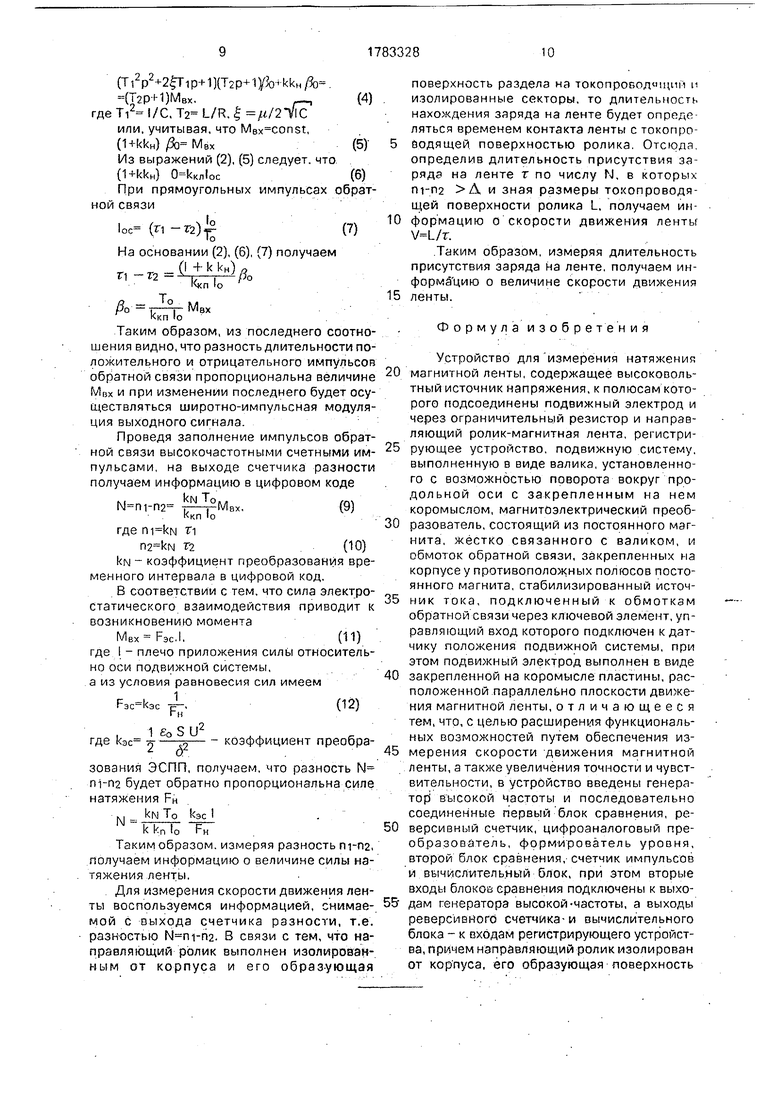
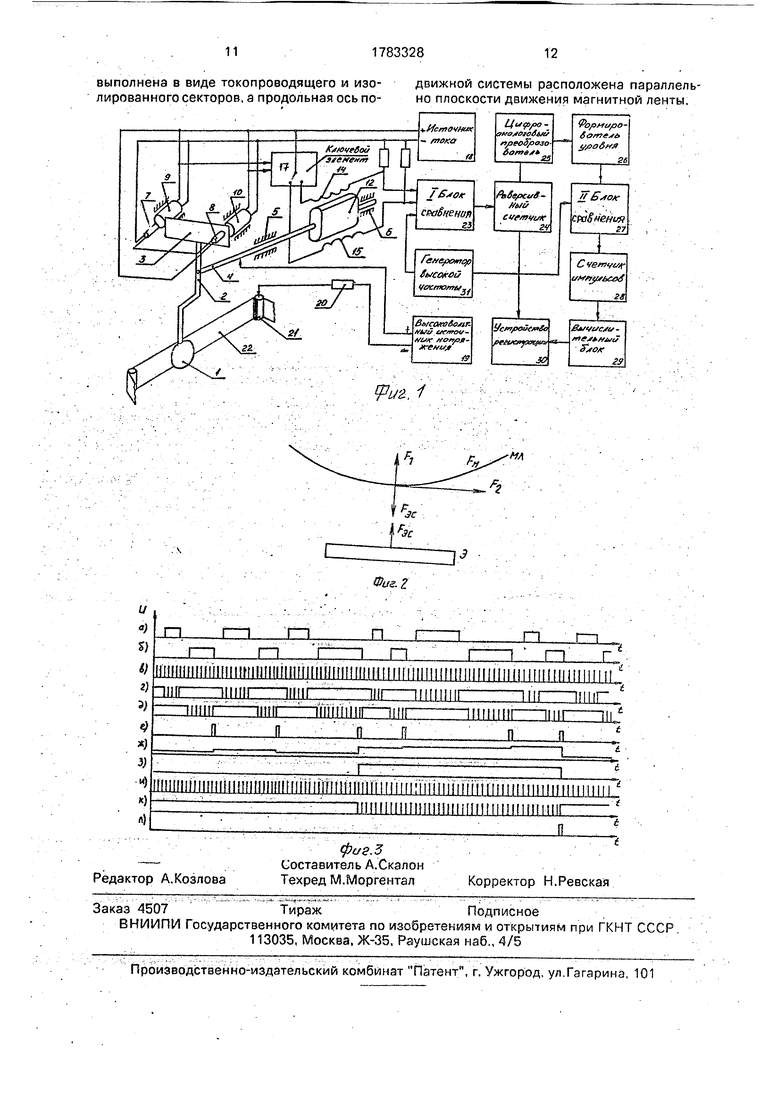
На фиг. 1 показана функциональная схема устройства для измерения натяжения ленты; на фиг.2 -диаграмма сил электростатического взаимодействия электрода и лен0 ты, где FH - сила натяжения: РЭс - сила электростатического взаимодействия, FI и F2 нормальная и тангенциальная составляющие силы натяжения; МЛ - магнитная лента; Э - подвижный электрод на фиг.З 5 временные диаграммы работы электронных блоков устройства.
Плоский электрод 1 закреплен на одном конце коромысла 2, на другом конце которого установлена шторка 3. Коромысло 2 закреплено на одном из концов валика 4,
установленного в опорах 5 и 6 с возможностью перемещения вокруг своей продольной оси, что обеспечивает перемещение шторки 3 в зазоре между установленными попарно и соосно на корпусе устройства 5 излучателями 7 и 8 и фотоприемниками 9 и 10 датчика положения 11. Постоянный магнит 12 жестко насажен на продольную ось 4, которая вместе с коромыслом 2 и с закрепленными на них элементами образуют 10 подвижную систему 13. Обмотки 14 и 15 обратной связи закреплены на корпусе устройства у противоположных полюсов постоянного магнита 1 и совместно с последним образуют магнитоэлектрический преобра- 15 зователь 16. Управляющие входы ключевого элемента 17 соединены с выходами фотоприемников 9 и 10 датчика 13 положения. К выходу ключевого элемента 17 подключены параллельно соединенные обмотки 14 и 15 20 обратной связи. К клеммам стабилизированного источника 18 постоянного тока подключены излучателями 7 и 8, фотоприемники 9 и 10, обмотки 14 и 15 обратной связи и ключевой элемент 17.25
Положительная клемма высоковольтного источника 19 постоянного напряжения соединена с плоским электродом 1, а отрицательная клемма источника 19 через резистор 20 и направляющий ролик 21 - с 30 магнитной лентой 22. Электрод 1 закреплен на коромысле 2 таким образом, что его плоскость и продольная ось А подвижной системы 13 расположены параллельно плоскости движения ленты, обеспечивая 35 перпендикулярное перемещение электрода 1 относительно ленты 22. Направляющий ролик 21 изолирован откор- пуса, и его образующая поверхность выполнена в виде токопроводящего и 40 изолированного секторов. К выходным обмоткам 14, 15 обратной связи магнитоэлектрического преобразователя подключены последовательно соединенные первый блок 23 совпадения, реверсивный счетчик 24, 45 цифроаналоговый преобразователь 25, формирователь 2Ь уровня, второй блок 27 совпадения, счетчик28 импульсов, вычислительный блок 29 и устройство 30 регистрации, другой вход которого соединен с 50 выходом реверсивного счетчика 24, а вторые входы первого и второго блоков совпадения 23, 27 подключены к выходам высокочастотного генератора 31.
Блоки 23, 27 совпадения выполнены на 55 элементе И (микросхема 155ЛИ1), формирователь 26 уровня представляет собой пороговый элемент (микросхема К544САЗ). В качестве вычислительного 29 блока используется делитель (микросхема К155ИР1). Устройство регистрации являе;ся двухканэль- ным и может быть построено на светодиодных семисегметных индикаторах АЛС321 с дешифраторами КР514ИД1.
При подаче разнополярного высоковольтного напряжения от источника 19 на плоский электрод 1 и на направляющий ролик 21, имеющий на образующей поверхности токопроводящий и изолированные секторы, на ленте 22 будет присутствовать заряд в моменты ее контакта с токопроводя- щим сектором ролика. В эти моменты между лентой 22 и электродом 1 возникает сила Электростатического взаимодействия F3C, пропорциональная величине приложенного напряжения и обратно пропорциональная квадратур расстояния д между ними. Из диаграммы сил электростатического взаимодействия электрода и ленты (фиг.2) следует необходимость параллельности расположения их плоскостей, т.к. это обеспечивает на- ибольшую эффективную площадь электростатического взаимодействия. Из условия расновесия сил (фиг.2)уравновеши- вание силы РЭс происходит за счет нормальной составляющей FI силы натяжения FH магнитной ленты. При изменении натяжения ленты при постоянном напряжении для сохранения состояния равновесия системы лента-электрод необходимо соответствующее изменение величины силы РЭс. Таким образом, зависимость РЭс от величины натяжения магнитной ленты дает возможность говорить о зависимости момента Мох, действующего на подвижную систему, создаваемого силой электроста тического взаимодействия, от силы FH. что использовано для измерения последней.
Устройство работает следующим образом.
Предположим, что в исходном положении шторка 3, закрепленная на противоположном относительно электрода 1 конце коромысла 2, перекрывает поток излучения одного из излучателей, например 8. При подаче питания на излучатели 7 и 8 и фотоприемники 9 и 10 срабатывает фотоприемник 9, сигнал с которого поступает на один из управляющих входов ключевого элемента 17, и в обмотку 15 обратной связи магнитоэлектрического преобразователя 16 подается ток от стабилизированного источника 18 постоянного тока. При этом в магнитоэлектрическом преобразователе 16 за счет взаимодействия магнитного поля постоянного магнита 12 с магнитным полем, создаваемым постоянным током, идущим по обмотке 15 обратной связи, возникает момент вокруг продольной оси валика 4, направленный таким образом, что подвижная
система 13 переходит в положение, при котором шторка 3 перекрывает поток излучения излучателя 7. но открывает поток излучения излучателя 8. Тогда фотоприемник 9 закроется, а фотоприемник 10 откроется. Сигнал с фотоприемника 10 поступает на второй вход ключевого элемента 17, после переключения которого ток от стабилизированного источника 18 постоянного тока пойдет в обмотку 14 обратной связи магнитоэлектрического преобразователя 16, за счет чего в последнем будет создаваться момент, направленный противоположно предыдущему. Далее процесс переключения будет повторяться, и таким образом по- движная система 13 устройства и, следовательно, плоский электрод 1 будут совершать автоколебания с некоторыми постоянными амплитудой и частотой.
Обеспечивая движение электрода перпендикулярно к плоскости движения ленты, добиваемся того, что их электростатическое взаимодействие приводит к изменению не частоты, как в прототипе (устройстве для измерения натяжения ленты), а скважности автоколебаний, что позволяет при дальнейшей обработке сигнала получить информацию о натяжении ленты через прямую зависимость между искомым параметром и величиной входного момента, создаваемого силой электростатического взаимодействия.
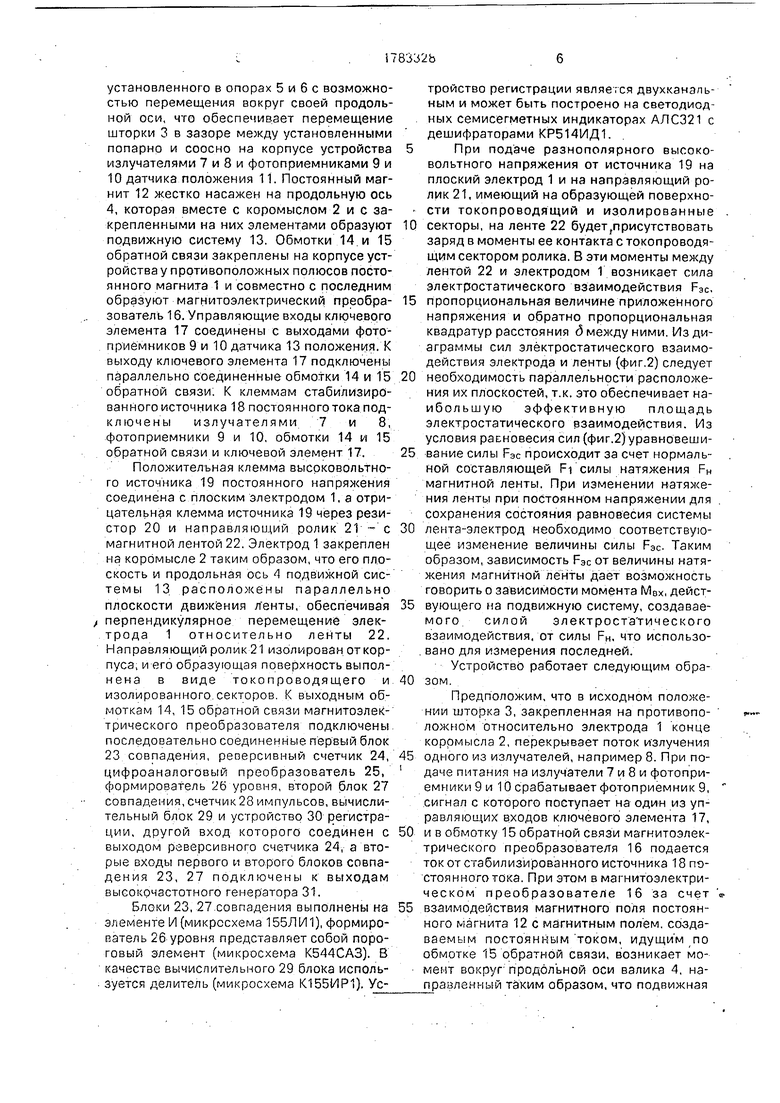
Последовательность биполярных импульсов (фиг.За, б) с обмоток 14,15 поступает на вход блока 23 совпадения, куда также подаются счетные высокочастотные импульсы (фиг.Зв), в результате чего осуществляется синхронизация счетных импульсов, импульсов обратной связи и заполнение интервалов Ti и Т2 счетными импульсами, в результате чего формируются пачки m и Л2 счетных импульсов (фиг.Зг, д). Эти пачки поступают на реверсивный счетчик 24, где определяется разность числа импульсов в пачках гп-П2 (фиг.Зе). Полученная разность пост упает на устройство 30 регистрации для визуальной оценки измеряемого параметра - силы натяжения FH. Кроме того, разность импульсов с реверсивного счетчика 24 поступает и на вход цифроаналогового преобразователя 25, который преобразует величину разности гм-П2 в аналоговый сигнал (фиг.Зж). Этот сигнал поступает на формирователь 26 уровня, осуществляющий формирование уровня по следующему принципу: при поступлении сигнала ni- П2 0 ± Д где Л - допустимое значение, вводимое в формирователь 26 уровня в качестве поправки, выдается сигнал нулевого
уровня, при поступлении всех других щ-П2 А формируется сигнал с постоянным по амплитуде уровнем (фиг.Зз). Причем длительность т сформированной ступеньки
перепада уровней пропорциональна времени присутствия высоковольтного потенциала на ленте 22, образованного в результате ее взаимодействия с токопроводящей поверхностью ролика. Полученные пачки импульсовзатемзаполняются
высокочастотными счетными импульсами (фиг.Зи, к) с генератора 31 высоких частот в блоке 27 совпадения и поступает на счетчик 28 импульсов, где производится подсчет
числа заполненных пачек N (фиг.Зл). Далее в вычислительном 29 блоке производится переход к оценке измерительного параметра - скорости движения ленты - путем выполнения операции деления L/т , где L длина то ко про водящего сектора направляющего ролика, и в устройстве 30 регистрации осуществляется ее визуальное отображение.
Поясним математически зависимости,
используемые для нахождения силы натяжения и скорости движения магнитной ленты.
Дифференциальное уравнение, описывающее собственное движение системы,
имеет вид
Р+р0 + М:(р, Р/ТЮ,(1)
где I - момент инерции подвижной системы;
ju - собственное демпфирование систе- мы;
F (Д РуЗ) - нелинейная функция, описывающая нелинейное звено;
k - коэффициент преобразования линейной части системы;
ft- угол поворота подвижной системы.
Поскольку в рассматриваемом устройстве реализован компенсационный метод измерения, то в установившемся режиме работы входной Мвх уравновешивается мо- ментом, создаваемым компенсирующим преобразователем;
МВх Ккп1ос,(2)
где ККР коэффициент преобразования компенсационного преобразователя; loc - ток обратной связи.
Заменив нелинейную функцию Fty ,p/), используя метод вибрационного сглаживания, плавной характеристикой
F(A,/3o) kH/3,(3)
где кц - коэффициент преобразования линеаризованного нелинейного элемента;
/3 о -смещение центра колебаний ПС,
получаем уравнениз. описывающее движение системы в виде
(Т 12p2+2ЈTi р+1)(Т2р+1 У) kkH/% (Т2рН)Мвх.,(4)
где Ti2 I/C. T2 L/R, | или. учитывая, что MBx const, (1+kkH) /3b Мвх(5)
Из выражений (2), (5) следует, что (1+kkH) 0 kKnloc(6)
При прямоугольных импульсах обратной связи
loc (ri -Т2)Ј
ю
На основании (2), (6), (7) получаем (I 4 k kH)
lo
и - °
РО (7)
П - Г2
А
м
вх
«о
Таким образом, из последнего соотношения видно, что разность длительности положительного и отрицательного импульсов обратной связи пропорциональна величине Мвх и при изменении последнего будет осуществляться широтно-импульсная модуляция выходного сигнала.
Проведя заполнение импульсов обратной связи высокочастотными счетными импульсами, на выходе счетчика разности получаем информацию в цифровом коде KN То.
-Me
(9)
1о
где 71
72(10)
kN - коэффициент преобразования временного интервала в цифровой код.
В соответствии с тем, что сила электростатического взаимодействия приводит к возникновению момента
,(11)
где I - плечо приложения силы относительно оси подвижной системы, а из условия равновесия сил имеем 1
F,,
(12)
,1 Бо S U
где k3C 2 -15-
коэффициент преобразования ЭСПП, получаем, что разность N будет обратно пропорциональна силе натяжения FH
N , N Т° i k kn to FH
Таким образом, измеряя разность щ-П2. получаем информацию о величине силы натяжения ленты,
Для измерения скорости движения ленты воспользуемся информацией, снимаемой с выхода счетчика разности, т.е. разностью N ni-n2. В связи с тем, что направляющий ролик выполнен изолированным от корпуса и его образующая
поверхность раздела на токопрог.пд«щип и изолированные секторы, то длительность нахождения заряда на ленте будет опреде ляться временем контакта ленты с токопро
водящей поверхностью ролика Отсюда определив длительность присутствия заряда на ленте т по числу N, в которых щ-П2 Д и зная размеры токопроводя- щей поверхности ролика L, получаем информацию о скорости движения ленты .
Таким образом, измеряя длительность присутствия заряда на ленте, получаем ин- форма цию о величине скорости движения
ленты.
Формула изобретения
Устройство для измерения натяжения
магнитной ленты, содержащее высоковольтный источник напряжения, к полюсам которого подсоединены подвижный электрод и через ограничительный резистор и направляющий ролик-магнитная лента, регистрирующее устройство, подвижную систему, выполненную в виде валика, установленного с возможностью поворота вокруг продольной оси с закрепленным на нем коромыслом, магнитоэлектрический преобразователь, состоящий из постоянного магнита, жестко связанного с валиком, и обмоток обратной связи, закрепленных на корпусе у противоположных полюсов постоянного магнита, стабилизированный источник тока, подключенный к обмоткам обратной связи через ключевой элемент, управляющий вход которого подключен к датчику положения подвижной системы, при этом подвижный электрод выполнен в виде
закрепленной на коромысле пластины, расположенной параллельно плоскости движения магнитной ленты, отличающееся тем, что, с целью расширения функциональных возможностей путем обеспечения измерения скорости движения магнитной ленты, а также увеличения точности и чувствительности, в устройство введены генератор высокой частоты и последовательно соединенные первый блок сравнения, реверсивный счетчик, цифроаналоговый преобразователь, формирователь уровня, второй блок сравнения, счетчик импульсов и вычислительный блок, при этом вторые входы блоков сравнения подключены к выходам генератора высокой-частоты, а выходы реверсивного счетчика-и вычислительного блока - к входам регистрирующего устройства, причем направляющий ролик изолирован от корпуса, его образующая поверхность
выполнена в виде токопроводящего и изолированного секторов, а продольная ось подвижной системы расположена параллельно плоскости движения магнитной ленты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения натяжения ленты | 1988 |
|
SU1610321A1 |
| Устройство для измерения скорости ленточного носителя | 1983 |
|
SU1109646A1 |
| Автоматизированный измеритель момента спиральных пружин | 2017 |
|
RU2676220C1 |
| Измеритель выходных характеристик спиральных пружин | 2016 |
|
RU2623816C1 |
| Устройство для бесконтактного преобразования в электрический сигнал зарядового рельефа с диэлектрического ленточного носителя | 1986 |
|
SU1476619A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ТОКА И НАПРЯЖЕНИЯ | 1972 |
|
SU323741A1 |
| Устройство для определения угла наклона объекта | 1980 |
|
SU896414A1 |
| Моментомер для статических измерений | 2017 |
|
RU2659180C1 |
| АВТОМАТИЗИРОВАННЫЙ СТЕНД КОНТРОЛЯ ВЫХОДНЫХ ХАРАКТЕРИСТИК СПИРАЛЬНЫХ ПРУЖИН | 2012 |
|
RU2526553C2 |
| Цифровой автоматический гравиметр | 1980 |
|
SU934424A1 |
Сущность изобретения. Устройство содержит высоковольтный источник напряжения, к которому подсоединен подвижный электрод и через ограничительный резистор и направляющий ролик магнитная лента. Подвижная система выполнена в виде валика с закрепленным на нем коромыслом. Магнитоэлектрический преобразователь состоит из постоянного магнита, жестко связанного с валиком, и обмоток обратной связи, закрепленных у противоположных полюсов постоянного магнита. Стабилизированный источник тока подключен к обмоткам обратной связи.через ключевой элемент, Подвижный электрод выполнен в виде закрепленной на коромысле пластины, расположенной параллельно плоскости движения магнитной ленты. Устройство содержит также один генератор высокой частоты, два блока сравнения, один реверсивный счетчик, один цифроаналоговый преобразователь, один формирователь уровня, один счетчик импульсов, один вычислительный блок и одно регистрирующее устройство. Зил. сл
и
а) «
t)
П
г;ПЯ
шш
ШШ1Ш
ж) 3) О «) «)
фиг, 1
JCL
П
П
Л
1ПИГ.
ШЕ
пинии
111ЯПП1111И11ИППШШШ1ППШ1Г
| Устройство для измерения натяжения ленты | 1988 |
|
SU1610321A1 |
