1
(21)4781059/24 (22)10.01.90 (46)23.12.92. Бюл. № 47
(71)Морской гидрофизический институт АН УССР
(72)В.А. Гайский и А.А. Ерошко
(56)Авторское свидетельство СССР № 458849, кл. G08 С 19/02. 1975.
(54) МНОГОКАНАЛЬНАЯ ТЕЛЕИЗМЕРИТЕЛЬНАЯ СИСТЕМА
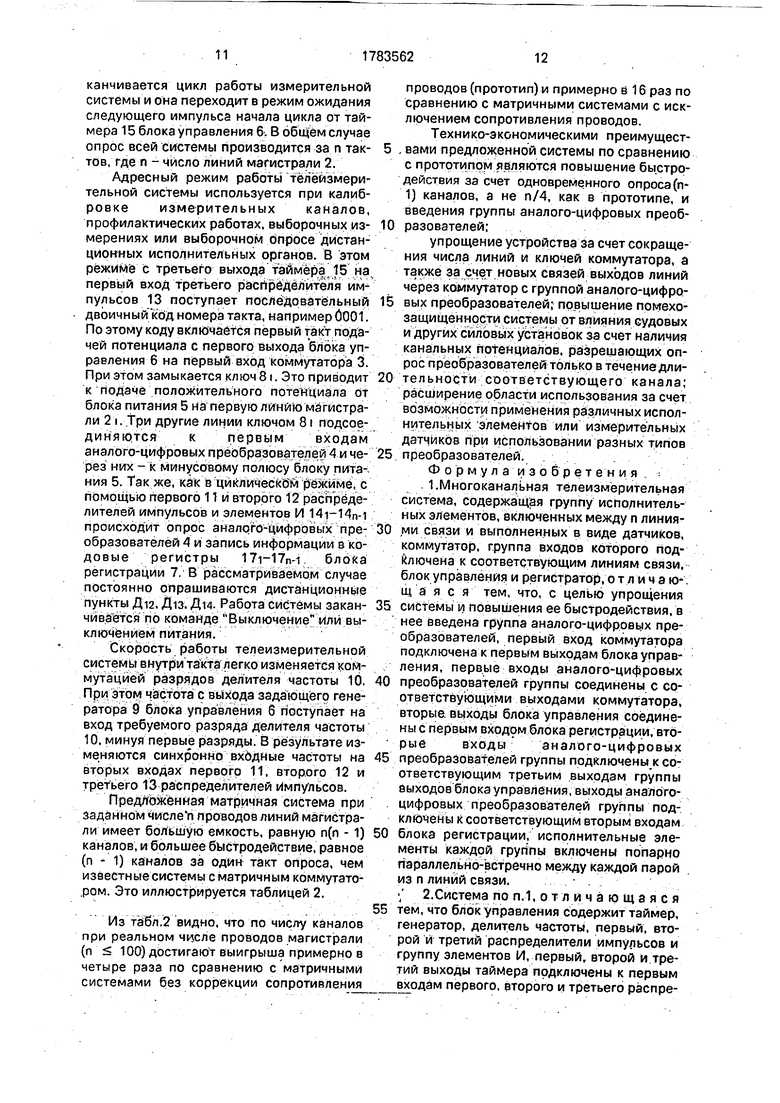
(57)Изобретение предназначено, в частности, для океанографических исследований. Цель изобретения - упрощение системы и повышение ее быстродействия. Система содержит исполнительные элементы (дистанционные блоки) 1, включенные в приводную магистраль связи 2, поданную через коммутатор 3 и аналого-цифровые преобразователи 4 на источник напряжения 5, причем блоки связаны с блоком управления 6, соединенным с регистратором 7 и коммутатором 3. Блок управления 6 имеет заданный генератор, делитель частоты, разрядный, канальный и тактовый распределители. Повышение быстродействия системы достигается путем одновременного опроса (п - 1) каналов и введения группы аналого-цифровых преобразователей. 1 з.п.ф-лы, 7 ил

| название | год | авторы | номер документа |
|---|---|---|---|
| Система телемеханики | 1982 |
|
SU1152015A1 |
| Устройство для приема и обработки информации | 1979 |
|
SU855715A1 |
| Устройство для передачи и приема сигналов | 1981 |
|
SU964692A1 |
| Многоканальное телеизмерительное устройство | 1978 |
|
SU783823A1 |
| Многоканальный регулятор тепловых процессов (его варианты) | 1980 |
|
SU943667A1 |
| Отказоустойчивая система управления газоперекачивающим агрегатом | 1988 |
|
SU1629580A1 |
| Телеизмерительная система | 1983 |
|
SU1179411A1 |
| Устройство для передачи телеинформации | 1980 |
|
SU877601A1 |
| Многоканальная телеизмерительная система | 1985 |
|
SU1390624A1 |
| Адаптивный коммутатор телеизмерительной системы | 1989 |
|
SU1654855A2 |


Ч 00
со
01
о
ю
Изобретение относится к проводной телеметрии и предназначено для использования в системах автоматизации научных, в частности океанографических, исследований, контроля технологических процессов, противопожарной и другой сигнализации, а также телеуправления в системах с рассредоточенными датчиками и исполнительными органами.
Известны многоканальные системы проводной телеметрии, в которых используется минимальное (два) число проводов линии связи и временное, частотное или фазовое разделение каналов.
Состав и построение телеметрической системы зависит от условий, в которых она работает. Когда контролируемые пункты или технологические терминалы находятся в агрессивной среде или ограниченном пространстве, система строится так. что на стороне источника информации (передающей) она содержит только датчики и ключи; на приемной стороне - командные кодирующие устройства, преобразователи аналоговых величин в вид, удобный для потребителя, устройства первичной обработки, отображения и накопления информации.
Когда контролируемые пункты и технологические терминалы находятся на большом удалении от пункта управления, система строится так, что на передающей стороне она содержит ключи, преобразовали аналог-код, датчики; на приемной стороне - буферные устройства, командные кодирующие устройства, устройства первичной обработки, отображения и накопления информации. В синхронных телеметрических системах на обоих концах линии добавляются устройства синхронизации. В асинхронных системах перекодиров ка поступившей информации осуществляется в буферных устройствах.
Общим недостатком этих систем является сложность аппаратуры и ее высокая стоимость
Известно устройство дистанционного управления, в котором сигнал на дистанционные терминалы передается путем подачи на различные комбинации из двух проводов линии связи положительного и отрицательного потенциалов, при этом на дистанционном пункте срабатывает реле, обмотка которого вместе с диодом подключена к той паре проводов линии связи, на которые было подано напряжение. Обмотка- и диод в этом случае выполняют функции схемы совпадения.
Это устройство содержит на пункте управления ключи управления, клеммы положительного и отрицательного потенциала источника питания, на контролируемом пункте - цепочки из последовательно соединенных обмотки реле и диода, В нем на
пункте управления введены кодовые шины, ключи управления выполнены в виде двух жестко соединенных замыкающих контактов, первый вывод каждого из которых в каждом ключе управления через ограничительные резисторы подключены соответственно к положительной и отрицательной клеммам источника питания, вторые выводы первого и второго замыкающих контактов каждого ключа управления соединены с
соответствующими двумя кодовыми шинами, выходы кодовых шин подключены к проводам линии связи, на контролируемом пункте введены кодовые шины, входы которых соединены с проводами линии связи,
один и другой концы каждой цепочки из последовательно соединенных обмотки реле и диода подключены к двум соответствующим кодовым шинам.
Емкость системы достигает п(п -1) каналов при n-проводной линии связи.
Недостатком устройства является низкая эксплуатационная надежность, связанная с тем, что подача каждой последующей команды возможна только при снятой предыдущей. При случайной подаче хотя бы двух команд одновременно устройство не работает, источник питания замыкается на балластные сопротивления. Функции устройства ограничиваются только управлением, и оно не может быть использовано для получения измерительной информации с контролируемых пунктов, что является его существенным недостатком.
Известны также энергетические системы и системы управления, в которых используется принцип полярного разделения цепей, реализуемый попарным параллельно-встречным включением исполнительных или контролируемых устройств. В рассматриваемых системах при n-проводной линии связи один провод обязательно является общим.
Количество каналов в таких системах определяется из выражения
N п -К,
где N - количество каналов или исполин- Дельных элементов; п - число линейных проводов;
К - число используемых качественных признаков (при полярном разделении сигналов К 2).
Зависимость числа исполнительных элементов от числа линейных проводов приведена в табл.1.
Общим недостатком рассматриваемых систем является сравнительно небольшое число исполнительных элементов даже при использовании дорогостоящих многопроводных линий связи.
Известно устройство вызова объектов, содержащее три адресные шины и две шины управления, между которыми на дистанционных пунктах через группы диодов, число которых в каждом пункте равно числу дистанционных пунктов, и через замыкаю- щие контакты параллельно (но не встречно) включены обмотки реле, включающие объекты. Фактически в этом устройстве все бло- ки дистанционных пунктов обладают памятью (реле с самоблокировкой) и по ло- гике работы реализуют распределительный последовательный сдвиговый регистр, обеспечивающий по одному вызов объектов. Недостаток системы выражен в малом количестве каналов управления при значи- тельной сложности схемы.,,
Решение многих практических задач измерения и управления часто осложняется неблагоприятными условиями, в которых должна нормально функционировать теле- метрическая система. Это работа в скважинах, в водной и агрессивной среде, во взрыво- и огнеопасных местах, в широких диапазонах изменчивости температуры и давления , например , в многоканальном бук- сируемом измерительном комплексе для ис- следованиягидрофизических
характеристик морской среды на ходу судна. Измерительная сторона телеметрической системы работает в агрессивной среде, в условиях большого гидростатического давления при значительных статических и динамических нагрузках, испытываемых линией связи и первичными датчиками. Для таких систем дистанционные лункты долж- ны быть предельно простыми. Простота может быть достигнута увеличением числа линий связи в системе. В пределе каждый канал измерения или управления будет иметь свою линию связи. Однако такое ре- шение не является оптимальным, поскольку удорожает систему за счет резкого усложнения технологии изготовления многожиль- ных.линий связи. Существенно усложняется коммутатор центрального приемного пунк- та. Все это снижает надежность системы. Таким образом, решаемая задача выражается втом, чтобы сложность дистанционных пунктов была такой же, как при многопроводной линии связи, а число линий было бы существенно меньше.
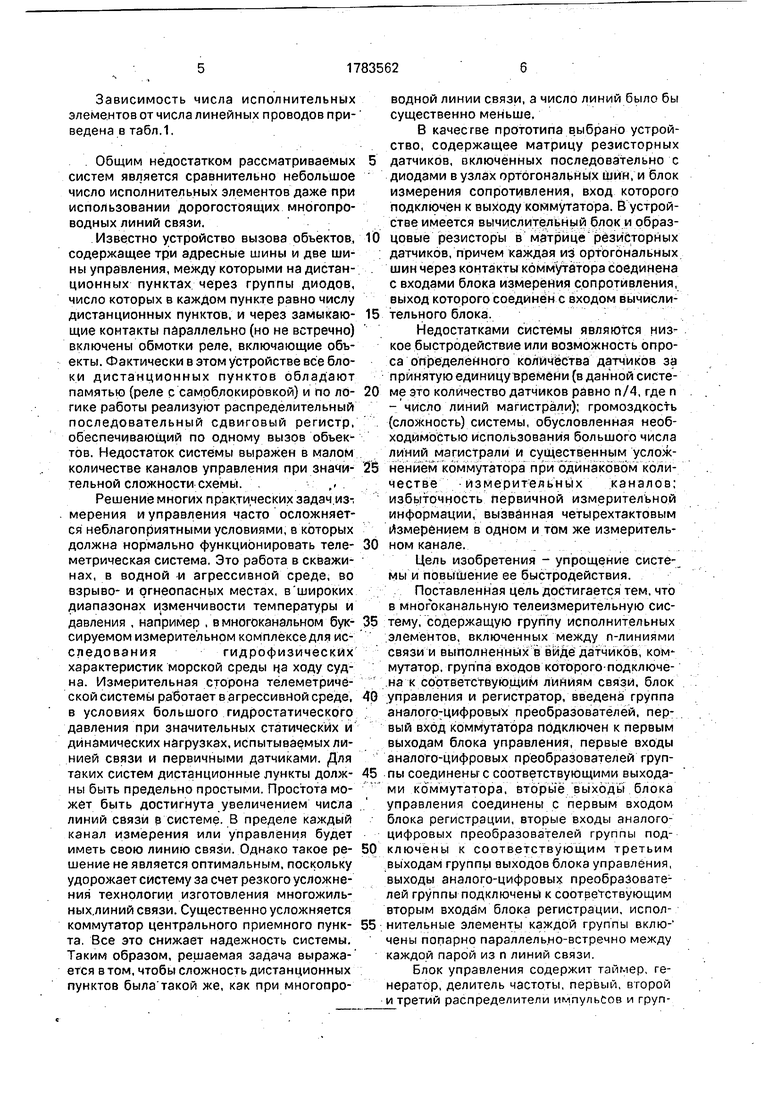
В качестве прототипа выбрано устройство, содержащее матрицу резисторных датчиков, включенных последовательно с диодами в узлах ортогональных шин, и блок измерения сопротивления, вход которого подключен к выходу коммутатора. В устройстве имеется вычислительный блок и образцовые резисторы в матрице резисторных датчиков, причем каждая из ортогональных шин через контакты коммутатора соединена с входами блока измерения сопротивления, выход которого соединен с входом вычислительного блока.
Недостатками системы являются низкое быстродействие или возможность опроса определенного количества датчиков за принятую единицу времени (в данной системе это количество датчиков равно п/4, где п - число линий магистрали); громоздкость (сложность) системы, обусловленная необходимостью использования большого числа линий магистрали и существенным усложнением коммутатора при одинаковом количестве измерительных каналов; избыточность первичной измерительной информации, вызванная четырехтактовым измерением в одном и том же измерительном канале.
Цель изобретения - упрощение системы и повышение ее быстродействия.
Поставленная цель достигается тем, что в многоканальную телеизмерительную систему, содержащую группу исполнительных элементов, включенных между п-линиями связи и выполненных в виде датчиков, ком мутатор, группа входов которого-подключе- на к соответствующим линиям связи, блок управления и регистратор, введена группа аналого7Цифровых преобразователей, первый вход коммутатора подключен к первым выходам блока управления, первые входы аналого-цифровых преобразователей группы соединены с соответствующими выходами коммутатора, вторые выходы блока управления соединены с первым входом блока регистрации, вторые входы аналого- цифровых преобразователей группы подключены к соответствующим третьим выходам группы выходов блока управления, выходы аналого-цифровых преобразователей группы подключены к соответствующим вторым входа м блока регистрации, исполнительные элементы каждой группы вклю- чены попарно параллельно-встречно между каждой парой из п линий связи.
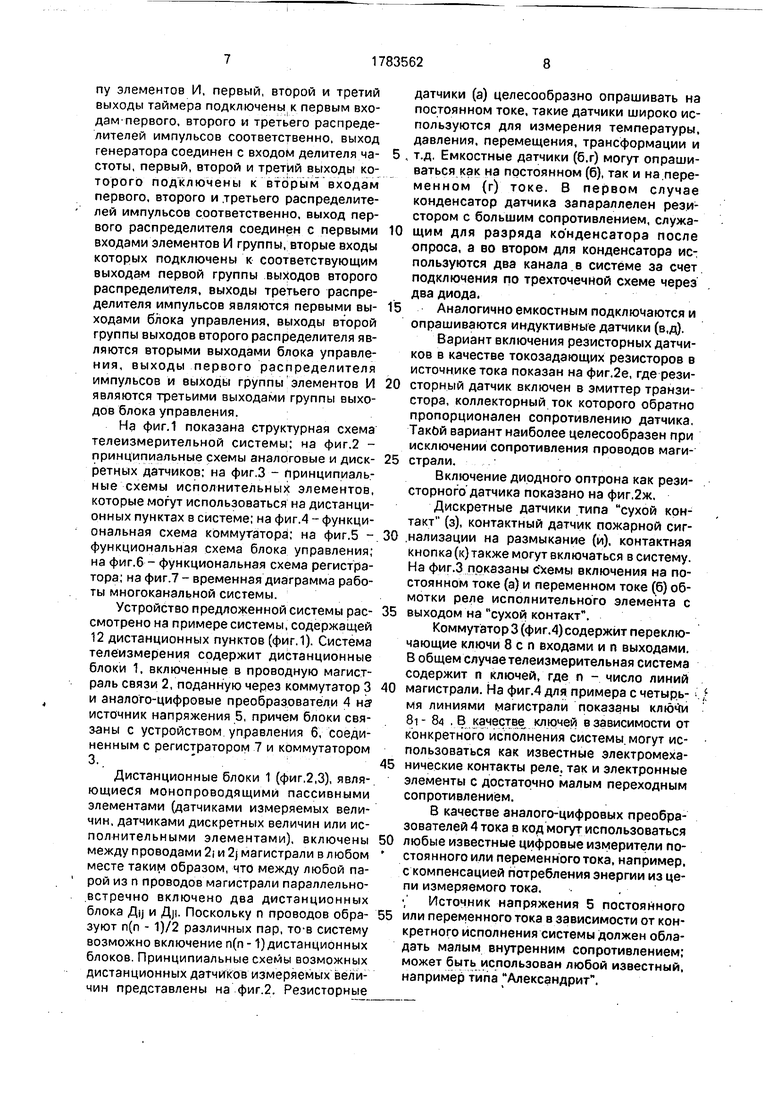
Блок управления содержит таймер, генератор, делитель частоты, первый, второй и третий распределители импульсов и труппу элементов И, первый, второй и третий выходы таймера подключены к первым входам первого, второго и третьего распределителей импульсов соответственно, выход генератора соединен с входом делителя частоты, первый, второй и третий выходы которого подключены к вторым входам первого, второго и третьего распределителей импульсов соответственно, выход первого распределителя соединен с первыми входами элементов И группы, вторые входы которых подключены к соответствующим выходам первой группы выходов второго распределителя, выходы третьего распределителя импульсов являются первыми выходами блока управления, выходы второй группы выходов второго распределителя являются вторыми выходами блока управления, выходы первого распределителя импульсов и выходы группы элементов И являются третьими выходами группы выходов блока управления.
На фиг.1 показана структурная схема телеизмерительной системы; ча фиг.2 - принципиальные схемы аналоговые и дискретных датчиков; на фиг 3 - принципиальные схемы исполнительных элементов, которые могут использоваться на дистанционных пунктах в системе; на фиг.4 - функциональная схема коммутатора; на фиг.5 - функциональная схема блока управления; на фиг.6 - функциональная схема регистратора; на фиг.7 - временная диаграмма работы многоканальной системы.
Устройство предложенной системы рассмотрено на примере системы, содержащей 12 дистанционных пунктов (фиг.1). Система телеизмерения содержит дистанционные блоки 1. включенные в проводную магистраль связи 2, поданную через коммутатор 3 и аналого-цифровые преобразователи 4 нэ источник напряжения 5, причем блоки связаны с устройством управления б, соединенным с регистратором 7 и коммутатором 3.
Дистанционные блоки 1 (фиг,2,3), являющиеся монопроводящими пассивными элементами (датчиками измеряемых величин, датчиками дискретных величин или исполнительными элементами), включены между проводами 2, и 1 магистрали в любом месте таким образом, что между любой парой из п проводов магистрали параллельно- встречно включено два дистанционных блока Ду и flji. Поскольку п проводов образуют п(п -1)/2 различных пар, то-в систему возможно включение п(п-1) дистанционных блоков Принципиальные схемы возможных дистанционных датчиков измеряемых величин представлены на фиг.2. Резисторные
датчики (а) целесообразно опрашивать на постоянном токе, такие датчики широко используются для измерения температуры, давления, перемещения, трансформации и
т.д. Емкостные датчики (б,г) могут опрашиваться как на постоянном (б), так и на пере- менном (г) токе. В первом случае конденсатор датчика запараллелен резистором с большим сопротивлением, служащим для разряда конденсатора после опроса, а во втором для конденсатора используются два канала в системе за счет подключения по трехточечной схеме через два диода.
Аналогично емкостным подключаются и опрашиваются индуктивные датчики (в,д).
Вариант включения резисторных датчиков в качестве токозадающих резисторов в источнике тока показан на фиг.2е, где резисторный датчик включен в эмиттер транзистора, коллекторный ток которого обратно пропорционален сопротивлению датчика, Такой вариант наиболее целесообразен при исключении сопротивления проводов магистрали.
Включение диодного оптрона как рези- сторного датчика показано на фиг,2ж,
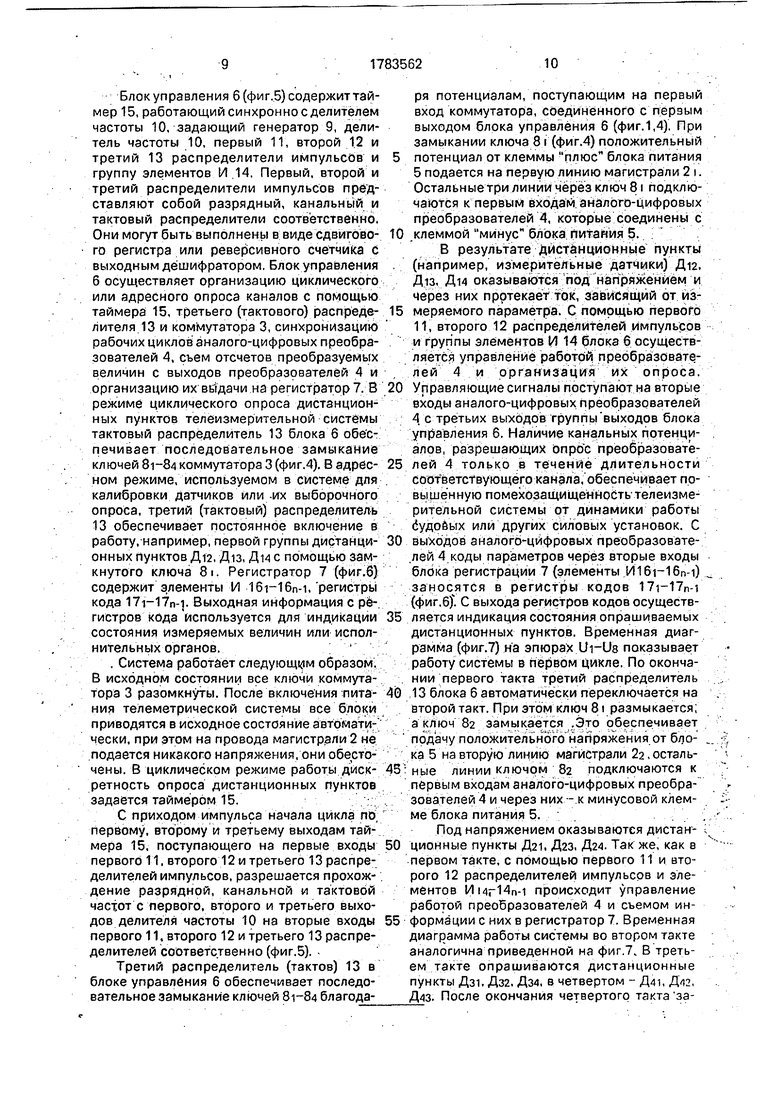
Дискретные датчики типа сухой контакт (з), контактный датчик пожарной сигнализации на размыкание (и), контактная кнопка (к)также могут включаться в систему. На фиг.З показаны с хемы включения на постоянном токе (а) и переменном токе (б) обмотки реле исполнительного элемента с
выходом на сухой контакт.
Коммутатор 3 (фиг.4)содержит переключающие ключи Sen входами и п выходами. В общем случае телеизмерительная система содержит п ключей, где п - число линий
магистрали. На фиг.4 для примера с четырь- / мя линиями магистрали показаны 8т - 84 .В качестве ключей в зависимости от конкретного исполнения системы могут использоваться как известные электромеханические контакты реле, так и электронные элементы с достаточно малым переходным сопротивлением.
В качестве аналого-цифровых преобразователей 4 тока в код могут использоваться
любые известные цифровые измерители постоянного или переменного тока, например, с компенсацией потребления энергии из цепи измеряемого тока.
Источник напряжения 5 постоянного
или переменного тока в зависимости от конкретного исполнения системы должен обладать малым внутренним сопротивлением; может быть использован любой известный, например типа Александрит.
Блок управления 6 (фиг.5) содержит таймер 15, работающий синхронно с делителем частоты 10, задающий генератор 9, делитель частоты 10, первый 11, второй 12 и третий 13 распределители импульсов и группу элементов И 14, Первый, второй и третий распределители импульсов представляют собой разрядный, канальный и тактовый распределители соответственно. Они могут быть выполнены в виде сдвигового регистра или реверсивного счетчика с выходным дешифратором. Блок управления б осуществляет организацию циклического или адресного опроса каналов с помощью таймера 15, третьего (тактового) распределителя 13 и коммутатора 3, синхронизацию рабочих циклов аналого-цифровых преобразователей А, съем отсчетов преобразуемых величин с выходов преобразователей 4 и организацию их выдачи на регистратор 7. 8 режиме циклического опроса дистанционных пунктов телеизмерительной системы тактовый распределитель 13 блока 6 обеспечивает последовательное замыкание ключей 81-84 коммутатора 3 (фиг.4). В адресном режиме, используемом в системе для калибровки датчиков или -их выборочного опроса, третий (тактовый) распределитель 13 обеспечивает постоянное включение в работу, например, первой группы дистанционных пунктов Д12, Д13, Д14 с помощью замкнутого ключа 8i. Регистратор 7 (фиг.б) содержит элементы И 16i-16n-i, регистры кода 17i-17n-i. Выходная информация с регистров кода используется для индикации состояния измеряемых величин или исполнительных органов.
, Система работает следующим образом. В исходном состоянии все ключи коммутатора 3 разомкнуты. После включения питания телеметрической системы все блоки приводятся в исходное состояние автомати- чески, при этом на провода магистрали 2 не подается никакого напряжения, они обесточены. В циклическом режиме работы дискретность опроса дистанционных пунктов задается таймером 15.
С приходом импульса начала цикла по, первому, второму и третьему выходам таймера 15, поступающего на первые входы первого 11, второго 12 и третьего 13 распределителей импульсов, разрешается прохождение разрядной, канальной и тактовой частот с первого, второго и третьего выходов делителя частоты 10 на вторые входы первого 11, второго 12 и третьего 13 распределителей соответственно (фиг.5). Третий распределитель (тактов) 13 в блоке управления 6 обеспечивает последовательное замыкание ключей 81-84 благодаря потенциалам, поступающим на первый вход коммутатора, соединенного с первым выходом блока управления 6 (фиг.1,4), При замыкании ключа 81 (фиг.4) положительный 5 потенциал от клеммы плюс блока питания 5 подается на первую линию магистрали 21. Остальные три линии через ключ 81 подключаются к первым входам аналого-цифровых преобразователей 4, которые соединены с
0 клеммой минус блока питания 5.
В результате дистанционные пункты (например, измерительные датчики) Дг2, Д13, Д14 оказываются под напряжением и через них протекает ток, зависящий от из5 меряемого параметра. С помощью первого 11, второго 12 распределителей импульсов и группы элементов И 14 блока 6 осуществляется управление работой преобразователей 4 и организация их опроса,
0 Управляющие сигналы поступают на вторые входы аналого-цифровых преобразователей 4 с третьих выходов группы выходов блока управления 6. Наличие канальных потенциалов, разрешающих опрос преобразовате5 лей 4 только в течение длительности соответствующего канала, обеспечивает повышенную помехозащищенность телеизмерительной системы от динамики работы будовых или других силовых установок. С
0 выходов аналого-цифровых преобразователей 4 коды параметров через вторые входы блока регистрации 7 (элементы H16i-16n-i) заносятся в регистры кодов 17i-17n-i (фиг.б) С выхода регистров кодов осуществ5 ляется индикация состояния опрашиваемых дистанционных пунктов. Временная диаграмма (фиг.7) на эпюрах Ui-Us показывает работу системы в первом цикле. По окончании первого такта третий распределитель
0 13 блока 6 автоматически переключается на второй такт. При этом ключ 81 размыкается, а ключ 82 замыкается .Это обеспечивает подачу положительного напряжения от бло- . ка 5 на вторую линию магистрали 22,осталь5: ные линии ключом 8а подключаются к первым входам аналого-цифровых преобразователей 4 и через них - к минусовой клемме блока питания 5.
Под напряжением оказываются дистан- ..
0 ционные пункты Д21, Д23, Д24. Так же, как в первом такте, с помощью первого 11 и второго 12 распределителей импульсов и элементов 1/1иг14п-1 происходит управление работой преобразователей 4 и сьемом ин5 формации с них в регистратор 7. Временная диаграмма работы системы во втором такте аналогична приведенной на фиг.7. В третьем такте опрашиваются дистанционные пункты Дзт, Дз2, Дз4, в четвертом - Д41, , Д43. После окончания четвертого такта заканчивается цикл работы измерительной системы и она переходит в режим ожидания следующего импульса начала цикла от таймера 15 блока управления 6. В общем случае опрос всей системы производится за п тактов, где п - число линий магистрали 2.
Адресный режим работы телеизмерительной системы используется при калибровке измерительных каналов, профилактических работах, выборочных измерениях или выборочном опросе дистанционных исполнительных органов. В этом режиме с третьего выхода таймера 15 на первый вход третьего распределителя импульсов 13 поступает последовательный двоичный код номера такта, например 0001. По этому коду включается первый такт подачей потенциала с первого выхода блока управления 6 на первый вход коммутатора 3. При этом замыкается ключ 81. Это приводит к подаче положительного потенциала от блока питания 5 на первую линию магистрали 2 i. Три другие линии ключом 81 подсое- диняются к первым входам аналого-цифровых преобразователей 4 и через них - к минусовому полюсу блоку питания 5. Так же, как в циклический режиме, с помощью первого 11 и второго 12 распределителей импульсов и элементов И 14r-14n-i происходит опрос аналого-цифровых преобразователей 4 и запись информации в кодовые регистры 17i-17n-t блока регистрации 7. В рассматриваемом случае постоянно опрашиваются дистанционные пункты Д-12, Д13. Д14. Работа системы заканчивается по команде Выключение или выключением питания.
Скорость работы телеизмерительной системы внутри такта легко изменяется коммутацией разрядов делителя частоты 10. При этом частота с выхода задающего генератора 9 блока управления 6 поступает на вход требуемого разряда делителя частоты 10, минуя первые разряды. В результате изменяются синхронно входные частоты на вторых входах первого 11, второго 12 и третьего 13 распределителей импульсов.
Предложенная матричная система при заданном числе п проводов линий магистрали имеет большую емкость, равную п(л - 1) каналов, и большее быстродействие, равное (п - 1) каналов за один такт опроса, чем известные системы с матричным коммутатором. Это иллюстрируется таблицей 2.
Из табл.2 видно, что по числу каналов при реальном числе проводов магистрали (п 100) достигают выигрыша примерно в четыре раза по сравнению с матричными системами без коррекции сопротивления
проводов (прототип) и примерно в 16 раз по сравнению с матричными системами с исключением сопротивления проводов.
Технико-экономическими преимущест, вами предложенной системы по сравнению с прототипом являются повышение быстродействия за счет одновременного опроса (п- 1) каналов, а не п/4, как в прототипе, и введения группы аналого-цифровых преоб0 разователей;
упрощение устройства за счет сокращения числа линий и ключей коммутатора, а также за счет новых связей выходов линий через коммутатор с группой аналого-цифро5 вых преобразователей; повышение помехозащищенности системы от влияния судовых и других силовых установок за счет наличия канальных потенциалов, разрешающих опрос преобразователей только в течение дли0 тельности соответствующего канала; расширение области использования за счет возможности применения различных исполнительных элементов или измерительных датчиков при использовании разных типов
5 преобразователей.
Формула изобретения 1 .Многоканальная телеизмерительная система, содержащая группу исполнительных элементов, включенных между п линия0 ми связи и выполненных в виде датчиков, коммутатор, группа входов которого подключена к соответствующим линиям связи, блок управления и регистратор, отличающаяся тем, что, с целью упрощения
5 системы и повышения ее быстродействия, в нее введена группа аналого-цифровых преобразователей, первый вход коммутатора подключена к первым выходам блока управления, первые входы аналого-цифровых
0 преобразователей группы соединены с соответствующими выходами коммутатора, вторые выходы блока управления соединены с первым входом блока регистрации, вторые входы аналого-цифровых
5 преобразователей группы подключены к соответствующим третьим выходам группы выходов блока управления, выходы аналого- цифровых преобразователей группы подключены к соответствующим вторым входам
0 блока регистрации, исполнительные элементы каждой группы включены попарно параллельно-встречно между каждой парой из п линий связи. ; 2.Система поп.1, от л ича ю щая с я
5 тем, что блок управления содержит таймер, генератор, делитель частоты, первый, второй и третий распределители импульсов и группу элементов И, первый, второй и третий выходы таймера подключены к первым входам первого, второго и третьего распределителей импульсов соответственно, выход генератора соединен с входом делителя частоты, первый, второй и третий выходы которого подключены к вторым входам первого, второго и третьего распределителей импульсов соответственно, выход первого распределителя соединен с первыми входами элементов И группы, вторые входы которых подключены к соответствующим выходам первой группы выходов второго
а 6
I
и
к
Фие.1
распределителя, выходы третьего распределителя импульсов являются первыми выходами блока управления, выходы второй группы выходов второго распределителя являются вторыми выходами блока управления, выходы первого распределителя импульсов и выходы группы элементов И являются третьими выходами группы выходов блока управления.
Таблица
Фиг.З
От блока управления
1783562
К индикаторам
