(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи и приема сигналов дистанционного управления | 1986 |
|
SU1765840A1 |
| Система для передачи и приема информации | 1981 |
|
SU1053128A1 |
| Устройство для передачи и приема сигналов дистанционного управления | 1988 |
|
SU1571635A1 |
| Устройство телеуправления | 1989 |
|
SU1649585A1 |
| Устройство для телеконтроля | 1977 |
|
SU680018A1 |
| Устройство для телеконтроля | 1990 |
|
SU1732366A1 |
| Система телемеханики | 1977 |
|
SU690530A1 |
| Устройство для ввода дискретных сигналов | 1988 |
|
SU1522221A1 |
| Устройство пункта управления системы телемеханики | 1986 |
|
SU1374265A1 |
| Система для передачи и приема дискретной информации | 1988 |
|
SU1564669A1 |
Изобретение позволяет повысить надежность устройства и безопасность управ- ления машиной за счет увеличения достоверности приема информации и уменьшения запаздывания при восстановлении канала связи. Цель - повышение достоверности принимаемых сигналов. Устройство содержит передатчик 1 команд управления, приемник 2 команд управления, селектор 3 синхроимпульсов, генератор 4 импульсов, распределитель 5 импульсов, блок 6 исполнительных элементов, элементы 7,14 задержки, блок 8 сигнализации, триггеры 9, 10, регистры 11, 17 элементы И 12,13, дифференцирующие элементы 15,16, инвертор 18. Цель достигается обеспечением уменьшения запаздывания при восстановлении канала связи. 2 ил.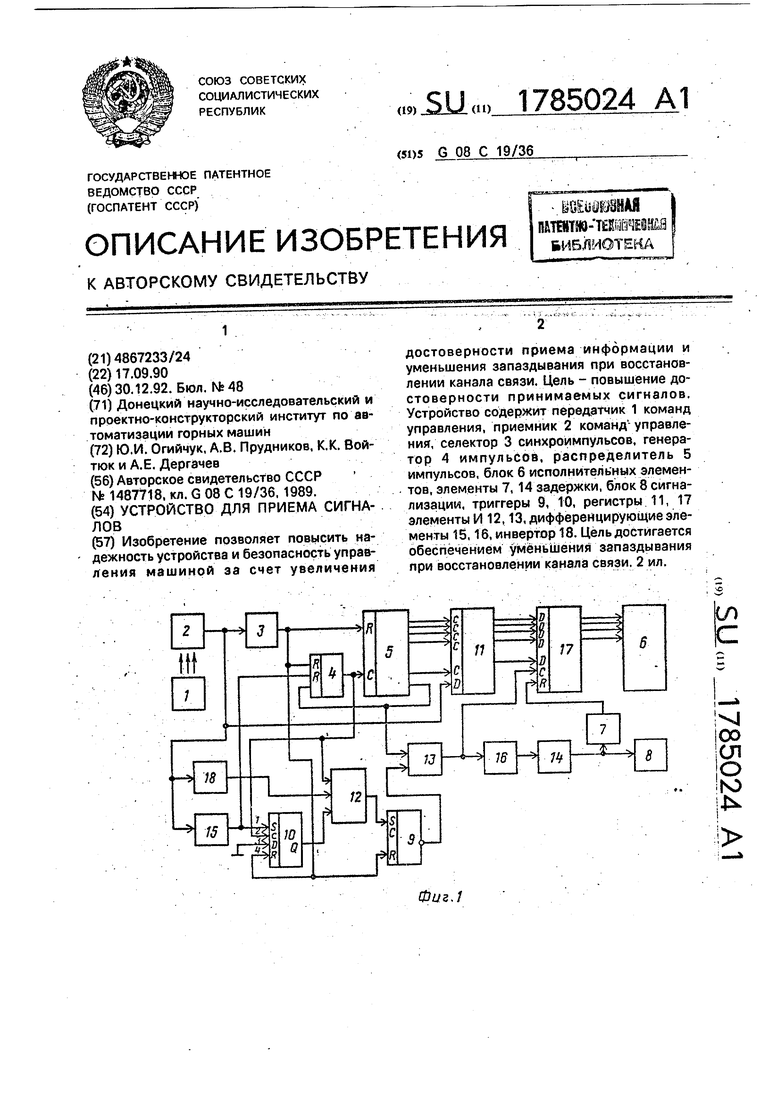
00
;сл
о
jo
Фиг,1
Изобретение относится к горной промышленности, в частности, к средствам дистанционного управления горными машинами, например, проходческими комбайнами, породопогрузочными машинами и т. п. Заявляемое устройство может быть использовано также для дистанционного управления подвижными объектами в других областях техники.
Известно устройство для передачи, и приема сигналов дистанционного управления по авт. св. Мг 1218810, кл. G 08 С 19/36, 1985.
Устройство содержит передатчик и приемник команд управления, селектор синхроимпульсов, генератор импульсов, распределитель импульсов, блок ключей, регистр, бло к исполнительных элементов, счетчик импульсов, элемент задержки и блок сигнализации.
Передатчик формирует модулированные в инфракрасном диапазоне частот последовательности командных импульсов, разделенных синхроимпульсами, длительность которых в несколько раз больше длительности командных импульсов.
Приемное устройство демодулирует принятый сигнал, выделяя из него синхроимпульсы и командные импульсы. Синхроимпульсы используются для циклической синхронизации распределителей импульсов передающей и приемной сторон устройства. Командные импульсы поступают на блок исполнительных элементов, который управляет работой соответствующих исполнительных механизмов объекта.
При исчезновении канала связи приемное устройство обеспечивает запоминание принятой информации и включает блок звуковой сигнализации, извещающий оператора о необходимости восстановления канала связи. Если в течение 3-4 с канал связи будет восстановлен, с приходом первого синхроимпульса блок сигнализации выключается и разрешается дальнейшее управление работой объекта. Если в течение 3-4 с канал связи не будет восстановлен, приемное устройство выключит объект управления.
Недостатком устройства является снижение достоверности приема информации из-за того, что исполнение принятой информации и выключение звукового сигнала происходит после первого же пришедшего синхроимпульса, прием которого нельзя считать критерием уверенного восстановления канала .
Наиболее близким по технической сущности к предлагаемому является применяемое на горных машинах устройство для
приема сигналов по авт. св. Мг 1487718 СССР, кл. G 08 С 19/36.
Устройство содержит передатчик команд управления, приемник команд управления, селектор синхроимпульсов, генератор импульсов, распределитель импульсов, блок ключей, регистр, блок исполнительных элементов, элемент задержки, блок сигнализации, элемент И, регистр
0 сдвига и триггеры.
Устройство работает следующим образом.
После каждого цикла передачи в регистр записывается информация о передан5 ных командах, которые после 2-4-крзтного подтверждения поступают на исполнение в блок исполнительных элементов. По мере увеличения расстояния между передатчиком и приемником уровень принимаемого
0 сигнала падает и может возникнуть момент, когда хотя бы один синхроимпульс не появится на выходе селекторе. В этом случае включается блок сигнализации, закрывается блок ключей и запоминаются принятые
5 команды. Если канал связи через 4 с не восстановится, то, как и в аналоге, произойдет общее отключение объекта управления. Если же в течение этого времени канал будет восстановлен до такой степени, что про0 исходитуверенныйприем
синхроимпульсов, то только после неискаженного приема следующих подряд синхроимпульсов, то только после неискаженного приема следующих подряд синхроимпуль5 сов отключится блок сигнализации и откроется блок ключей, разрешающий выполнение принятых команд.
Недостатком устройства является снижение достоверности приема информации
0 и надежности его работы в переходных режимах работы, т. е. при потере и восстановлении канала связи. Сравнительный анализ аналога и прототипа показывает, что существенным отличием последнего является то,
5 что исполнение принятой информации и выключение звукового сигнала происходит не после приема первого же синхроимпульса, а только после приема подряд нескольких синхроимпульсов. Этот признак, безуслов0 но, является более информативным критерием достоверности процесса восстановления канала связи. Вместе с тем данный критерий не обеспечивает полную достоверность процесса восстановления
5 канала связи, а следовательно достоверность приема информации по следующей причине: управление горными машинами и другими подвижными объектами характеризуется постепенным снижением уровня принимаемого сигнала при увеличении расстояния между передатчиком и приемником команд управления. При этом существует большая вероятность возникновения таких случаев, когда из-за различия в длительности и энергетических характеристиках син- хроимпульсов и командных импульсов синхроимпульсы, как имеющие большую длительность, четко выделяются селектором, в то время как некоторые импульсы команд управления искажаются по длитель- ности так, что они не могут быть зафиксированы в регистре приемного устройства. В этом случае в устройстве-прототипе после прихода нескольких подряд синхроимпульсов будет отключен блок сигнализации и выдано разрешение на выполнение команд управления, хотя полного восстановления канала связи не произошло из-за большого затухания сигналов некоторых командных импульсов. Это снижает не только досто- верность принимаемой информации, но и надежность устройства, так как управление будет осуществляться в условиях неуверенного приема сигналов, что может привести к сбоям и ошибкам в управлении машиной.
Одной из причин снижения достоверности приема информации и надежности уст- ройства-прототипа является также запаздывание при восстановлении канала связи, так как при этом требуется дополни- тельное время для приема нескольких синхроимпульсов. Уменьшить это время практически нельзя, так как при этом необходимо уменьшить кратность подтверждения прохождения синхроимпульсов, а это, в свою очередь, уменьшает эффективность принятого критерия достоверности восстановления канала связи. С другой стороны и принятый критерий нельзя существенно улучшить за счет простого увеличения крат- ности подтверждения прохождения синхроимпульсов, так как это ведет к увеличению входом первого элемента И, второй вход которого подключен к выходу инвертора, а выход - к второму входу первого триггера, инверсный вход которого соединен с вторым входом второго элемента И.
Сущность изобретения состоит в повышении критерия достоверности восстановления канала связи путем дополнения существующего признака новым признаком, сущность которого заключается в том, что одновременно с контролем синхроимпульсов осуществляется также контроль сигналов командных импульсов. В соответ- ствии с этим предложенное устройство принимает решение о восстановлении (или потере) канала связи и отключении (или о включении) звукового сигнала не только по наличию (или отсутствию) синхроимпульсов
в принятом сигнале из канала связи, но и при условии, что один (или хотя бы один) из принятых командных импульсов по длительности не менее половины его длительности, сформированной в передатчике.
Для реализации сущности изобретения и достижения поставленной цели существенными являются такие признаки, как снабжение известного устройства дополнительными блоками (элемент- И, инвертор, дифференцирующие элементы, параллельный регистр, элемент задержки), а также новые связи между этими блоками и известными блоками. Видоизменение или ликвидация любого из этих признаков не позволяет достичь цели изобретения.
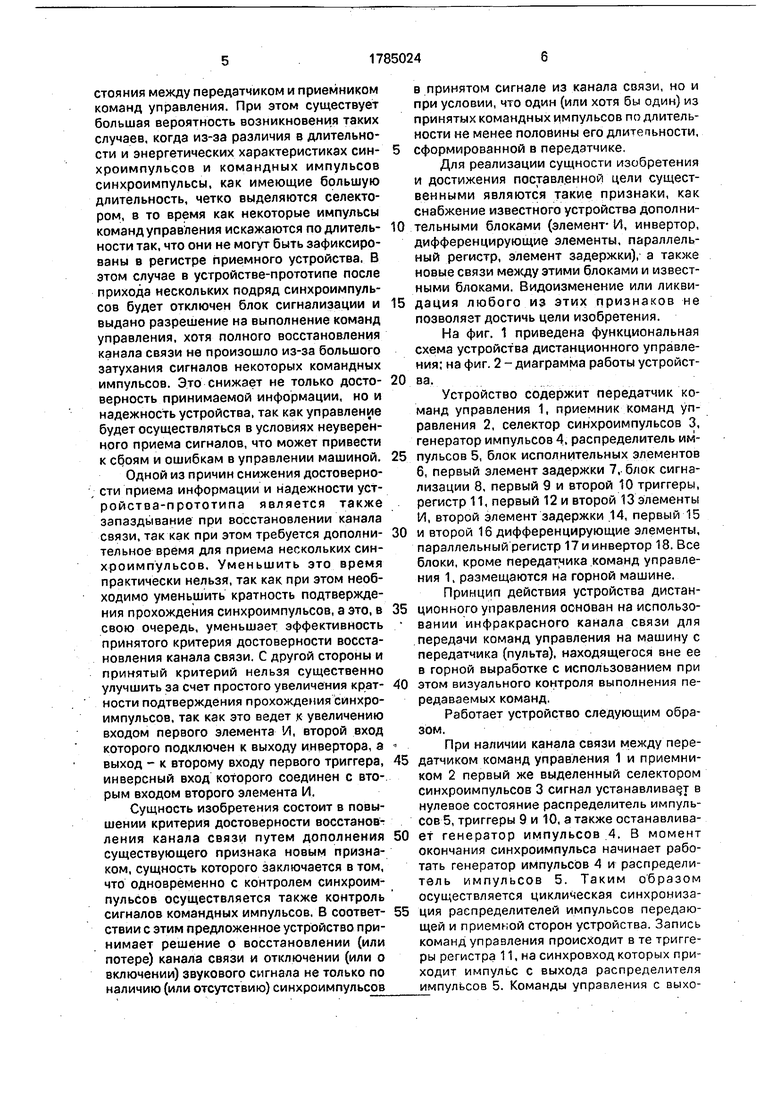
На фиг. 1 приведена функциональная схема устройства дистанционного управления; на фиг. 2 - диаграмма работы устройства.
Устройство содержит передатчик команд управления 1, приемник команд управления 2, селектор синхроимпульсов 3, генератор импульсов 4, распределитель импульсов 5, блок исполнительных элементов 6, первый элемент задержки 7, блок сигнализации 8, первый 9 и второй 10 триггеры, регистр 11, первый 12 и второй 13 элементы И, второй элемент задержки 14, первый 15 и второй 16 дифференцирующие элементы, параллельный регистр 17 и инвертор 18. Все блоки, кроме передатчика команд управления 1, размещаются на горной машине.
Принцип действия устройства дистанционного управления основан на использовании инфракрасного канала связи для передачи команд управления на машину с передатчика (пульта), находящегося вне ее в горной выработке с использованием при этом визуального контроля выполнения передаваемых команд.
Работает устройство следующим образом.
При наличии канала связи между передатчиком команд управления 1 и приемником 2 первый же выделенный селектором синхроимпульсов 3 сигнал устанавливает в нулевое состояние распределитель импульсов 5, триггеры 9 и 10, а также останавливает генератор импульсов 4. В момент окончания синхроимпульса начинает работать генератор импульсов 4 и распределитель импульсов 5. Таким образом осуществляется циклическая синхронизация распределителей импульсов передающей и приемной сторон устройства. Запись команд управления происходит в те триггеры регистра 11, на синхровход которых приходит импульс с выхода распределителя импульсов 5. Команды управления с выходом регистра 11 переписываются в параллельный регистр 17 импульсом с последнего выхода распределителя 5, поступающим через второй (13) элемент И при условии наличия на его втором входе сигнала логической единицы, поступающего с инверсного выхода первого триггера 9, что имеет место при уверенном приеме команд управления из канала связи.
Далее сигналы команд управления с выходов параллельного регистра 17, после их 2-4-кратного подтверждения, поступают на блок исполнительных элементов 6, вызывая срабатывание соответствующих реле, контакты которых включают исполнительные механизмы.
Сигнал с выхода второго элемента И 13 дополнительно поступает через второй дифференцирующий элемент 16 на вход сброса второго элемента 14 с временем задержки, равной интервалу времени между двумя синхроимпульсами. С выхода второго элемента задержки 14 сигнал логического нуля поступает на вход блока сигнализации 8 и первый элемент задержки 7 и отключает их, если они были включены.
Последний выход распределителя импульсов 5 блокирует выход генератора импульсов 4. Распределитель 5 и генератор 4 остаются в таком состоянии до прихода сле- дующего сигнала синхроимпульса от селектора синхроимпульсов 3. При приходе очередного синхроимпульса работа устройства аналогична.
Если по каким-либо причинам (например, неисправность приемника или исчезновение канала связи) в сигнале, поступающем с выхода приемника 2 исчезнут синхроимпульсы, это приведет к тому, что в требуемый момент времени сигнал сброса элемента задержки 14 будет отсутствовать и на его выходе появится сигнал логической единицы, который включит блок сигнализации 8 и если не произойдет через 3-4 с восстановление синхроимпульсов, произойдет сброс параллельного регистра 16 сигналом с выхода элемента задержки 7, что вызовет отключение объекта управления. В случае если в течение 3-4 канал связи будет восстановлен, т. е. на выходе приемника появятся сигналы синхроимпульсов, то первая же принятая в след за синхроимпульсом последовательность сигналов команд управления будет зафиксирована в параллельном регистре 17 сигналом с выхода второго элемента И 13 и этим же сигналом сбросится второй элемент задержки 14, отключится блок сигнализации 8 и сбросится первый элемент задержки 7. Устройство
работает таким образом при мгновенном пропадании канала связи.
Управление неподвижным объектом характеризуется постепенным снижением
уровня принимаемого сигнала при увеличении расстояния между передатчиком 1 и приемником 2 команд управления. На выходе приемника 2 появляются искаженные по длительности сигналы синхроимпульсов и
0 сигналы команд управления. При этом возможен такой случай когда сигналы синхроимпульсов имеют длительность достигнутую для срабатывания селектора синхроимпульсов 3, а следующие за синхро5 импульсом некоторые из сигналов команд управления искажены по длительности так, что они не могут быть зафиксированы в регистре 11. В этом случае с помощью введенных новых блоков, осуществляющих
0 контроль длительности командных импульсов, устройство не пропускает на выход блока исполнительных элементов 6 сигналы команд управления, что приведет к отключению горной машины (если канал не будет
5 надежно восстановлен).
Рассмотрим подробнее работу устройства в этом режиме.
Для определения величины искажения по длительности сигналов команд управле0 ния на выходе приемника 2 устройство снабжено дифференцирующими элементами 15, триггерами 9 и 10, инвертором 18 и первым (12) элементом И.
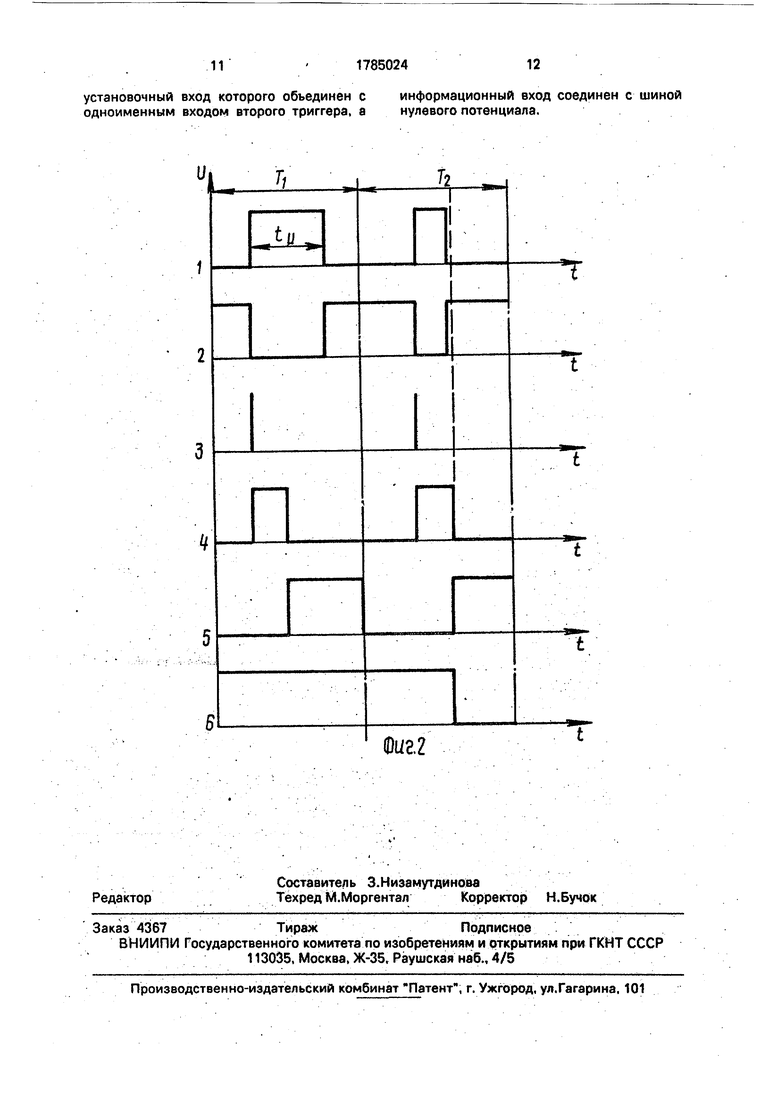
Для дальнейшего уяснения работы уст5 ройства необходимо учесть, что длительность сигнала команд управления, формируемая в передатчике 1, равна половине длительности периода генератора импульсов 4.
0 Сигналом с выхода селектора синхроимпульсов 3 триггеры 9 и 10 переводятся в отключенное состояние. Передний фронт сигнала команд управления проходит через дифференцирующий элемент 15 и устанав5 ливает триггер 10 в единичное (включенное) состояние и сбрасывает генератор импульсов 4. При этом возможны два случая:
1) Длительность пришедшего сигнала команды управления больше половины его
0 длительности, формируемой в передатчике: в этом случае через 0,25 периода частоты генератора импульсов 4 на его выходе появляется единичный сигнал, который поступает на распределитель импульсов 5,
5 синхровход триггера 10 и на один из входов первого (12) элемента И. На входе первого (12) элемента И, соединенном с выходом триггера 10. будет присутствовать единичный сигнал, а на входе, соединенном с вы- ходом инвертора 18, - нулевой сигнал, т. к.
на рходе инвертора 18 присутствует сигнал с выхода приемника 2. Следовательно, тактовый сигнал с выхода генератора 4 не проходит через первый (12) элемент И. Триггер 9 остается в отключенном состоянии и через второй (1) элемент И разрешается перезапись информации с регистра 11 в регистр .17.
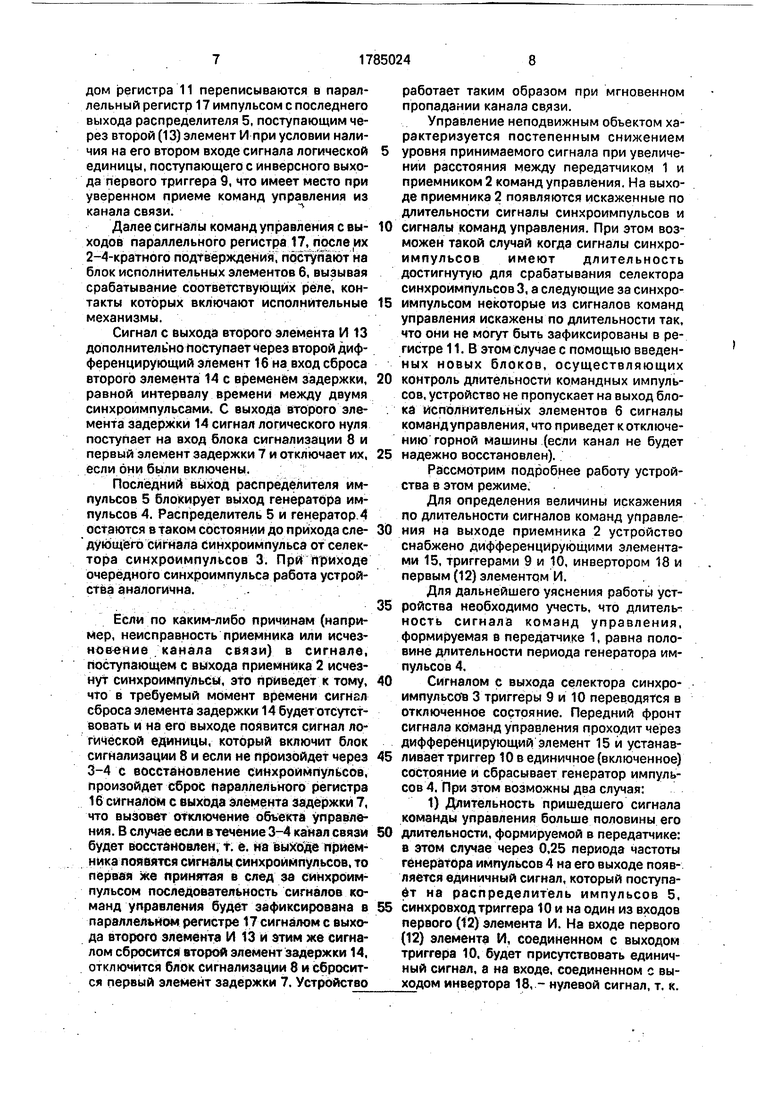
Диаграмма работы устройства для рассматриваемого случая приведена на фиг. 2 (период Т1), где показаны выходные сигналы следующих блоков: 1 - приемника команд управления 2; 2 - инвертора 18, 3 - дифференцирующего элемента 15,4 - триггера 10; 5 - генератора 4; 6 - триггера 9 (инверсный выход); tn - длительность командного импульса, t - время, U - уровень сигналов.
2) Длительность сигнала команд управления меньше половины его длительности, формируемой в передатчике.
Диаграммы работы устройства для этого случая приведена на фиг. 2 (период Т2). Через 0.25 периода частоты генератора импульсов А на всех входах первого (12) элемента И присутствуют единичные сигналы. Триггер 9 сигналом с выхода этого элемента переводится в единичное состояние. На его инверсном выходе, соединенным с одним из входов второго (13) элемента И, исчезает единичный сигнал и этим запрещается перезапись сигналом с последнего выхода, распределителя 5 содержимого регистра 11 в параллельный регистр 16, а также сброс элемента задержки 14. На выходе элемента задержки 14 появляется единичный сигнал, включающий блок сигнализации 8, своим сигналом предупреждающий об отсутствии уверенного приема сигналов от передатчика команд управления 1.
Осуществляемым таким образом контролем длительности командных импульсов повышается достоверность приема, информации и надежность работы устройства.
В дальнейшем (при восстановлении канала связи) если за сигналом синхроимпульса, сбрасывающим триггер 9, присутствует не искаженная по длительности последовательность команд управления, то сигнал с последнего выхода распределителя 5 проходит через второй (13) элемент 1/Ь при этом переписывается информация с выходов регистра 11 в параллельный регистр 17, сбрасывается элемент задержки 14 и отключается предупреждающий сигнал блока сигнализации 8. Таким образом реализуется принятый критерий достоверности процесса восстановления канала связи, а именно наличие в посылке одного синхроимпульса в соответствие норме длительности каждого командного импульса. Благодаря этому уменьшается запаздывание при восстановлении канала связи и повышается достоверность приема информации и на- дежность работы устройства.
Технико-экономические преимущества заявляемого технического решения состоят в повышении надежности устройства и без- опасности управления машиной благодаря увеличению достоверности приема информации и уменьшению запаздывания при восстановлении канала связи.
15
Формула изобретения
Устройство для приема сигналов, содержащее передатчик, приемник, выход которого соединен с входом первого регистра и
через селектор синхроимпульса - с установочными входами генератора импульсов, первого триггера и распределителя импульсов, выходы группы которого подключены к одноименным входам группы первого регистра, блок исполнительных элементов, вторые триггер и регистр, выход генератора импульсов соединен с входом распределителя импульсов, первые элемент И и.элемент задержки, блок сигнализации, о т л и чающееся тем, что, с целью повышения достоверности принимаемых сигналов, в него введены инвертор, дифференцирующие элементы, вторые элемент И и элемент задержки, выход первого элемента задержки соединен с установочным входом второго регистра, выход приемника соединен через инвертор с первым входом первого элемента И и через первый дифференцирующий элемент- с управляющим входом генератора импульсов и входом установки в 1м первого триггера, выход которого подключен к второму входу первого элемента И, выход которого подключен к входу установки в Г второго триггера, инверсный выход которого соединен с первым входом второго элемента И, выход распределителя импульсов соединен с входом генератора импульсов и вторым входом второго элемента И, выход которого соединен с синхровходом второго
регистра и через последовательно подключенные вторые дифференцирующий элемент и элемент задержки - с входами блока сигнализации и первого элемента задержки, выходы первого регистра соединены с
одноименными входами второго регистра, выходы которого подключены к одноименным входам блока исполнительных элементов, выход генератора импульсов подключен к третьему входу первого эле- мента И и синхровходу первого триггера,
установочный вход которого объединен с информационный вход соединен с шиной одноименным входом второго триггера, а нулевого потенциала.
и
4
Фиг
| Авторское свидетельство СССР № 1487718,кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
