агрегатируемый с трактором, снабженный компрессором, имеющ им ресивер, связанный шлангом и полой штангой 6 с улавливателем 7 плодов в виде подпружиненного пружиной 10 стакана 8. К дну стакана 8 .прикреплена пневматическая ладонь 11 с эластичными пальцами 9. Полая горловина 12 стакана 8 посажена на подшипник 13, который расположен в корпусе головки 14 штанги 6, т.е. улавливатель 7 имеет свободу вращения. В конце горловины 12 по ее наружному диаметру прикреплено крыло 15 со сферическими лопаткамиГслужащее для поворота улавливателя под воздействием, сжатого воздуха. Конец 16 полой штанги 6, входящий в головку 14, имеет два наконечника 17 и 18, распределяющих сжатый воздух шлангами 19 и 20 в пневматическую ладонь 11 стакана 8 и крыло 15. Сжатый воздух поступает по шлангу 19 в пневматическую ладонь 11с пальцами 9 через горловину 12 стакана 8 улавливателя 7. Для допуска и прекращения поступления сжатого воздуха в пневматическую ладонь 11с пальцами 9 и крыло 15 их шланги 19 и 20 снабжены подпружиненными рычагами 21 и 22. Шланг пневматической ладони 11с пальцами 9 для сброса давления в них имеет кнопку 23 сброса давления, содержащую стержень с клапаном. Для удаления сжатого воздуха из головки 14 она имеет выпускное отверстие 24. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для съема плодов | 1983 |
|
SU1160979A1 |
| УСТРОЙСТВО ДЛЯ РУЧНОГО СБОРА ПЛОДОВ ИЮТИНА | 1994 |
|
RU2093002C1 |
| МАНИПУЛЯТОР ДОЕНИЯ | 2000 |
|
RU2186486C2 |
| РУКАВИЦА С ПНЕВМОВИБРОЗАЩИТОЙ | 2011 |
|
RU2450782C1 |
| РУКАВИЦА С ПНЕВМОВИБРОЗАЩИТОЙ | 2012 |
|
RU2510880C1 |
| Устройство для сбора плодов | 1980 |
|
SU934975A1 |
| Установка для обработки внутренней поверхности резервуаров | 1987 |
|
SU1521509A1 |
| МАШИНА ДЛЯ ПОДПОЧВЕННОГО ВНЕСЕНИЯ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 1995 |
|
RU2112347C1 |
| ВУЛКАНИЗАТОР ДЛЯ РЕМОНТА МЕСТНЫХ ПОВРЕЖДЕНИЙ ПНЕВМАТИЧЕСКИХ ШИН ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2154576C1 |
| АВТОНОМНЫЙ КОМПЛЕКС ЗАЩИТЫ ОТ ПОСЛЕДСТВИЙ ТЕРРОРИЗМА | 2007 |
|
RU2351377C1 |

Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам для съемку плодов персика и ценных сортов груш и яблок.Цель изобретения - уменьшение по- вреждаемрсти плодов и упрощение конструкций.;;
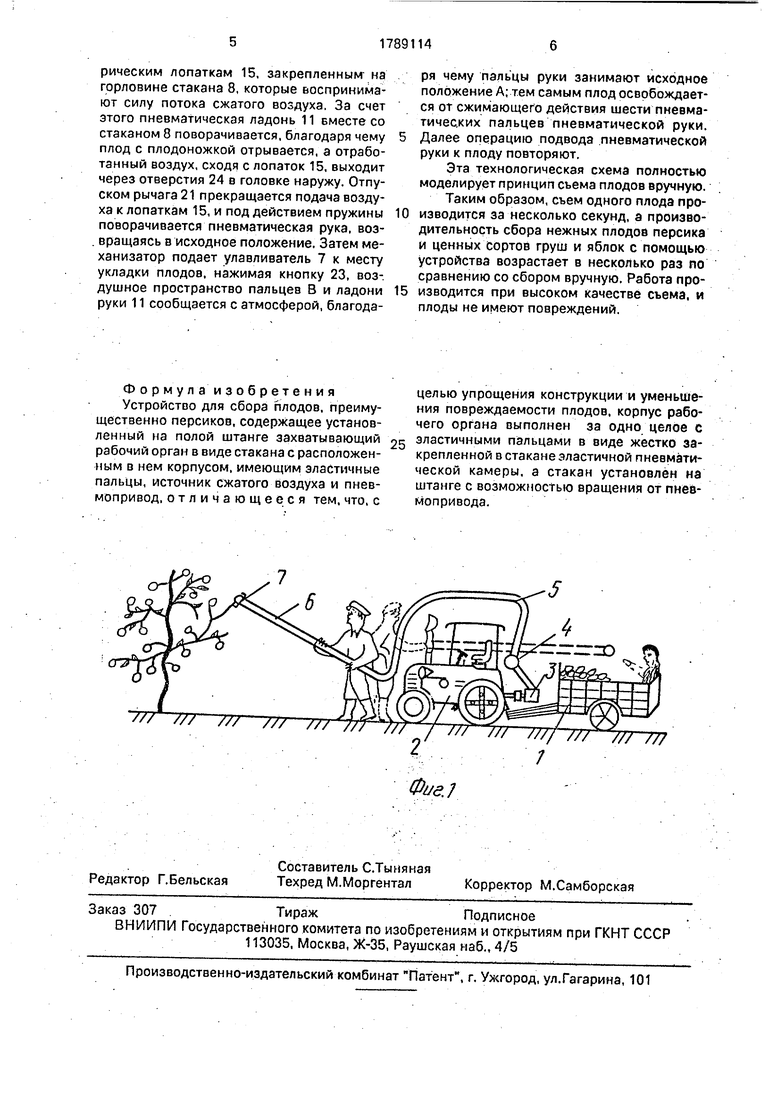
На фиг.1 показанбупредлатаемое уст ройство; на фиг.2 - улавливатель с головкой штанги.
Устройство содержит прицеп 1 (фиг.1) для транспортировки плодов, агрегатируемый с трактором 2, снабженный компрессором 3, имеющим ресивер 4, связанный шлангом 5 и полой штангой б с улавливателем 7 в виде стакана 8 с эластичными пальцами 9. Улавливатель 7 плодов выполнен в виде подпружиненного пружиной 10 стакана 8 (фиг,2), к дну которого прикреплена пневматическая ладонь 11с пальцами 9. Полая горловина 12 стакана 8 посажена на подшипник 13, который расположен в корпусе головки 14 штанги 6, т.е. улаоливатёль . 7 имеет возможность поворота. В конце горловины 12 по её наружному диаметру прикреплено крыло 15 со сферическими лопатками, служащее для поворота улавливателя под воздействием сжатого воздуха. Конец 16 полой штанги 6, входящий в головку 14, имеет два наконечника 17 и 18, распределяющих сжатый воздух шлангами 19 и 20 в пневматическую ладонь 1Т стакана 8 улавливателя 7 и крыло 15. Сжатый воздух поступает по шлангу 19. в пневматическую ладонь 11с пальцами 9 через горловину 12 стакана 8 улавливателя 7. Для допуска и прекращения поступления сжатого воздуха в пневматическую ладонь 11с пальцами 9 и крыло 15 шланги 19 и 20 снабжены подпружиненными рычагами 21 и 22. Шланг пневматической ладони 11с пальцами 9 для сброса давления имеет кнопку 23 сброса давления, содержащую стержень с клапаном.
Для удаления сжатого воздуха из головки 14 она имеет выпускное отверстие 24.
Улавливатель 7 предназначен для за- хвата и поворота (вращения) плода вокруг
его плодоножки. Его штанга 6 может быть изготовлена из пустотелой пластмассы или капрона, Пневматическая ладонь 11с пальцами 9 может быть выполнена из тонкой эластичной резины наподобие медицинской перчатки, прикрепленной ко дну стака- на 8.
Работа устройства заключается в следующем. Механизатор останавливает трактор 2 у дерева, включает в работу его ВОМ,
компрессор 3 вырабатывает сжатый воздух и направляет его в ресивер 4 для накопления, а оттуда он через редукционный клапан поступает по шлангу 6 к устройству для съема плодов, которое механизатор направляет к плоду. Плод попадает в улавливатель 7, т.е. в пневматическую ладонь 11 с пальцами 9. Сжатый воздух от ресивера 4 поступает по шлангу 5, переходящему в пустотелую штангу 6, где для лучшего управления сжатым воздухом он разделяется на два потока: по шлангу 19 воздух поступает в пустотелый объем ладони 11 и пальцев 9 только после нажатия рычага 21 на несколько секунд, благодаря чему объем пальцев А увеличивается
до объема В, и тем самым объем пространства С, в котором находится плод, мягко обхватывается, т.е. производится зажатие плода. Затем механизатор нажимает рычаг 22, направляя поток сжатого воздуха к сферическим лопаткам 15, закрепленным на горловине стакана 8, которые воспринимают силу потока сжатого воздуха. За счет этого пневматическая ладонь 11 вместе со стаканом 8 поворачивается, благодаря чему плод с плодоножкой отрывается, а отработанный воздух, сходя с лопаток 15, выходит через отверстия 24 в головке наружу. Отпуском рычага 21 прекращается подача воздуха к лопаткам 15, и под действием пружины поворачивается пневматическая рука, воз- . вращаясь в исходное положение. Затем механизатор подает улавливатель 7 к месту укладки плодов, нажимая кнопку 23, воз-, душное пространство пальцев В и ладони руки 11 сообщается с атмосферой, благодаФормул а изобретения Устройство для сбора плодов, преимущественно персиков, содержащее установленный на полой штанге захватывающий рабочий орган в виде стакана с расположенным в нем корпусом, имеющим эластичные пальцы, источник сжатого воздуха и пнев- мопривод. отличающееся тем. что, с
0
5
ря чему пальцы руки занимают исходное положение А; тем самым плод освобождается от сжимающего действия шести пневматических пальцев пневматической руки. Далее операцию подвода пневматической руки к плоду повторяют.
Эта технологическая схема полностью моделирует принцип съема плодов вручную.
Таким образом, съем одного плода производится за несколько секунд, а производительность сбора нежных плодов персика и ценных Сортов груш и яблок с помощью устройства возрастает в несколько раз по сравнению со сбором вручную. Работа производится при высоком качестве съема, и плоды не имеют повреждений.
целью упрощения конструкции и уменьшения повреждаемое™ плодов, корпус рабочего органа выполнен за одно целое с эластичными пальцами в виде жестко закрепленной в стакане эластичной пневматической камеры, а стакан установлен на штанге с возможностью вращения от пнев- йопривода.
| Патент США № 3591949, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
