Изобретение относится к управлению электрическими машинами и может быть использовано в многодвигательном импульсном электроприводе, преимущественно в станке для резки и зачистки провода.
Известно устройство для резки провода, состоящее из расположенных по ходу движения перерабатываемого провода отдающего механизма, подающего механизма, режущего механизма, транспортного механизма и накопителя готовой продукции.
Недостатком данного устройства является необходимость его перестройки при изменении длины отрезков, на которые разрезают провод. Привод режущего инструмента является пневматическим, имеет низкий КПД преобразования энергии, что при высокой частоте срабатывания приводит к увеличению расхода сжатого воздуха, мощности компрессорных установок и, как следствие, к повышенному потреблению энергии.
Наиболее близким является многодвигательный электропривод станка для резки и зачистки провода, содержащий отдающий механизм, датчик перемещения провода, подающий механизм, программный блок, датчик перемещения провода, датчик начального и конечного положения отрезного механизма, датчик наличия провода в рабочей зоне, отрезной механизм, причем отрезной механизм включает двигатель каретки и двигатель ножей, а также два устройства управления ими.
Однако в данном многодвигательном электроприводе отсутствует контроль по температуре двигателя привода каретки, что сокращает его срок службы, уменьшает производительность устройства из-за потерь времени на ремонт привода каретки.
Целью изобретения является повышение надежности и увеличение производительности многодвигательного электропривода за счет обеспечения необходимости температурного режима без прерывания технологического цикла обработки проводов.
Указанная цель достигается тем, что многодвигательный электропривод станка для резки и зачистки провода, содержащий последовательно соединенные между собой отдающий механизм, датчик перемещения, привод подачи провода, двигатель привода каретки, датчик аварийных перемещений, отрезной механизм и накопитель продукции, выход датчика перемещения соединен с первым входом программного блока, первый и второй выходы программного блока соединены с входом устройства управления привода каретки, выход которого соединен с обмоткой двигателя привода каретки, выход датчика аварийных отключений соединен со вторым входом программного блока, кнопка "Пуск" соединена с третьим входом программного блока, третий и четвертый выходы программного блока соединены с устройством управления двигателя отрезного механизма, выход которого соединен с двигателем отрезного механизма, датчики начального и конечного положения каретки соединены соответственно с четвертым и пятым входами программного блока, дополнительно содержит задатчик скорости в виде резистивного делителя напряжения со входами по малой и большой скорости, три резистора, оптрон и стабилитрон, двигатель привода каретки снабжен терморезистором, пятый и шестой выходы программного блока связаны соответственно с входами задатчика соответственно малой и большой скорости, выход которого через первый резистор соединен с общей точкой соединения клеммы для подключения к приводу подачи провода и общей шине; база и эмиттер фототранзистора зашунтированы вторым резистором, первый вывод терморезистора предназначен для подключения к источнику питания, второй его вывод соединен с анодом светодиода оптрона, катод которого соединен с катодом стабилитрона, анод которого подключен к общей шине и к одному выводу третьего резистора, другой вывод которого соединен с анодом светодиода оптрона.
Существует такая производительность, что при действительной величине производительности меньшей выше указанной, температура двигателя каретки не превышает заданной. Величина нагрева, кроме частоты срабатываний, увеличивается с увеличением сечения обрабатываемых проводов. Поэтому оператор может установить такую частоту и энергию срабатывания, при которых в установившемся режиме температура двигателя значительно превысит допустимую. Это приведет к резкому сокращению срока службы двигателя. Предлагаемая обратная связь позволяет осуществить переходной режим с установившейся температурой, превышающей допустимую до тех пор, пока температура не достигнет допустимой, и поддерживать его равной заданной не прерывая технологического цикла обработки проводов. Таким образом, станок работает с максимальной производительностью при заданном ограничении по температуре перегрева двигателя привода каретки.
На чертеже приведена структурная схема привода.
Многодвигательный электропривод станка для резки и зачистки проводов содержит расположенные по ходу движения разрезаемого провода отдающий механизм 1, датчик перемещения 2, привод подачи провода 3, двигатель привода каретки 4, отрезной механизм 5, накопитель продукции 6. Выход датчика перемещения 2 соединен с первым входом программного блока 7. Второй и четвертый выходы программного блока 7 соединены с входами устройства управления 8 двигателя каретки 4. Третий и пятый выходы программного блока 7 соединены с входами устройства управления 9 двигателя ножей 10. Первый вывод терморезистора 11, расположенного на катушке двигателя 4, соединен с анодом светодиода 12.1 оптронного транзистора и первым выводом первого резистора 13, второй вывод первого резистора 13 соединен с анодом стабилитрона 14, катод которого соединен с катодом светодиода 12.1 оптронного транзистора. Второй вывод терморезистора 11 соединен с положительным выводом источника питания +Еп, отрицательный вывод которого соединен с анодом стабилитрона 14. Первый вывод второго резистора 15 соединен с коллектором оптронного транзистора 12.2, эмиттер которого соединен с первым выводом третьего резистора 16 и общим проводом привода подачи провода 3. Второй вывод третьего резистора 16 соединен с базой оптронного транзистора 12.2, коллектор которого соединен с входом привода подачи провода 3. Второй вывод второго резистора 15 соединен с выходом задатчика скорости 17. Задатчик скорости содержит резистор 18, первый вывод которого соединен с первым выводом резистора 19 и с первым выходом программного блока 7. Второй вывод резистора 18 соединен с первым выводом резистора 20, второй вывод которого соединен с вторым выводом резистора 19. Движок резистора 18 соединен с анодом диода 21. Движок резистора 20 соединен с анодом диода 22. Катод диода 21 соединен через оптрон 23 с катодом диода 22 и является выходом диода 22, вход оптрона 23 соединен с шестым выходом программного блока 7. Многодвигательный электропривод содержит также датчик аварийного отключения 24, выход которого соединен с входом 4 программного блока 7, а также датчик начального положения 25 и датчик конечного положения 26, выходы которых соединены соответственно с входам 3 и 5 программного блока 7.
Работает многодвигательный электропривод следующим образом.
В программный блок 7 с клавиатуры вводятся данные о длине провода и количестве проводов. При нажатии кнопки "Пуск" программный блок 7 включает по выходу 1 привод подачи провода 3. При этом начинает подаваться провод со скоростью, пропорциональной напряжению задания задатчика скорости 17. Сигнал с датчика перемещения 2, пропорциональный длине провода, поступает на первый вход программного блока 7, который сравнивает текущее значение длины провода с заданным по программе. В момент отмера длины провода, заданной в программе, программный блок 7 дает по выходу 3 команду на включение устройства управления 9 двигателем ножей 10, а также с некоторой задержкой по Вых. 2 команду на включение устройства управления 8 двигателем каретки 4. Программный блок 7 по Вых. 4 осуществляет с помощью ШИМ регулирование энергии двигателя каретки 4, а по Вых. 5 регулирование энергии двигателя ножей 10. Эта энергия зависит от сечения провода, с которого снимается изоляция. При включении двигателя ножей 10 и двигателя каретки 4 в отрезном механизме 5 происходит отрез провода с одновременным снятием изоляции с переднего и заднего конца провода. Затем цикл работы повторяется. При срабатывании двигателя каретки 4 нагревается его обмотка и, соответственно, уменьшается сопротивление 11. Это приводит к увеличению напряжения на аноде светодиода 12.1. При превышении напряжения на аноде светодиода 12.1 напряжения стабилизации стабилитрона 14 ток светодиода 12.1 приводит к открыванию оптронного транзистора 12.2, который уменьшает напряжение задания задатчика скорости 17, т. е. уменьшается напряжение между эмиттером и коллектором оптронного транзистора 12.2. Это напряжение подается на вход привода подачи провода 3. В результате уменьшения задания привода уменьшается скорость подачи провода. Это приводит к уменьшению частоты F срабатываний двигателя 4 каретки:
Fi = Vi/Li , где Vi - скорость подачи провода;
Li - длина i-го провода.
Текущее значение температуры от i-1 к i-му удару:
Qi(t)= P/G·(F1+(F(i-1)-Fi)·exp(-t/TA) (1) где Q1= P/G - установившаяся температура нагрева катушки двигателя каретки при частоте срабатываний 1 Гц;
Р - активные потери;
G - коэффициент теплопроводности обмотки двигателя 4 каретки;
ТА - постоянная времени нагрева обмотки двигателя 4 каретки, ТА= 45 мин.
Уменьшение частоты срабатываний двигателя каретки приводит к уменьшению текущей температуры Qi(t).
Во время выполнения основного цикла, если длина провода больше 300 мм, программный блок 7 по шестому выходу включает оптрон 23 и подключает через диод 21 движок резистора 18 на выход задатчика скорости 17, тем самым увеличивая скорость Vi подачи провода. За 100 мм до окончания провода по шестому выходу программного блока 7 запирается оптронный транзистор 23, напряжение задания скорости тем самым определяется только резистором 20 задания малой скорости. Таким образом, во время выполнения программы может изменяться: с помощью резистора 18 максимальная скорость подачи, с помощью резистора 20 задание малой скорости подачи, в зависимости от заданной длины провода частота Fiсрабатываний, в зависимости от сечения провода активные потери Р обмотки двигателя 4 каретки. Совокупность перечисленных переменных определяет температуру перегрева обмотки двигателя 4 каретки. Параметры обратной связи элементов 11-23 рассчитываются таким образом, что поддерживается температура обмотки двигателя 4 каретки, не превышающая Q2= 160оС. При этом за счет изменения степени открытия оптронного транзистора 12.2 устанавливается такая частота Fi, что температура обмотки двигателя 4 каретки не превышает заданной Q2. Средняя температура обмотки двигателя 4 каретки Qcр при работе привода
Qср= ( t1·Q)/(
t1·Q)/( ti) ; величина
ti) ; величина  Σ ti·Qi/
Σ ti·Qi/ ti= M(Q)=
ti= M(Q)=  P(Q)dQ есть математическое ожидание М(х) случайной величины, принимающей значение Q; Р(х) - функция распределения Q, ti - время работы привода с температурой Q. По данным опроса потребителей функции нагрева обмотки двигателя 4 каретки можно принять равномерным. Тогда Qср= Qмин+(Qмакс-Qмин)/2 в случае отсутствия обратной связи по температуре по опытным данным:
P(Q)dQ есть математическое ожидание М(х) случайной величины, принимающей значение Q; Р(х) - функция распределения Q, ti - время работы привода с температурой Q. По данным опроса потребителей функции нагрева обмотки двигателя 4 каретки можно принять равномерным. Тогда Qср= Qмин+(Qмакс-Qмин)/2 в случае отсутствия обратной связи по температуре по опытным данным:
Qср1= 80 +(260-80)/2 = 170оС.
При наличии обратной связи по температуре
Qср= Qмин + (Q2-Qмин1)/2=
= 80+(160 - 80)/2= 120оС.
По типовой зависимости среднего срока службы провода для класса изоляции F определяем, что при наличии обратной температурной связи средний срок службы 25 лет, ее отсутствии - 11 мес. (56) Материалы симпозиума "Артос Юэроп", М. , 1979.
Авторское свидетельство СССР N 1706361, кл. Н 02 Р 7/62, опублик. 15.01.92.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухдвигательный электропривод переменного тока | 1989 |
|
SU1658363A1 |
| Устройство для регулирования частоты вращения трехфазного асинхронного электродвигателя | 1989 |
|
SU1677841A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С ЭЛЕКТРОННОЙ КОММУТАЦИЕЙ | 1993 |
|
RU2075823C1 |
| Устройство для управления стрелкой | 1989 |
|
SU1650507A1 |
| Устройство для управления электродвигателем воздуховсасывающего агрегата пылесоса | 1990 |
|
SU1734183A1 |
| Электропривод переменного тока | 1988 |
|
SU1661947A1 |
| Устройство для динамического торможения электродвигателя постоянного тока | 1986 |
|
SU1334332A1 |
| Электропривод переменного тока | 1981 |
|
SU955477A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2007 |
|
RU2342767C1 |
| Устройство для торможения трехфазного асинхронного электродвигателя | 1989 |
|
SU1624645A1 |
Использование: в многодвигательном импульсном электропроводе, преимущественно в станке для резки и зачистки провода. Сущность изобретения: устройство содержит по ходу движения разрезаемого провода отдающий механизм 1, датчик перемещения 2, привод подачи провода 3, двигатель привода каретки 4, снабженного термозистором 11, отрезной механизм 5, накопитель продукции 6, за счет чего и обеспечивается повышение надежности и увеличение производительности. 1 ил.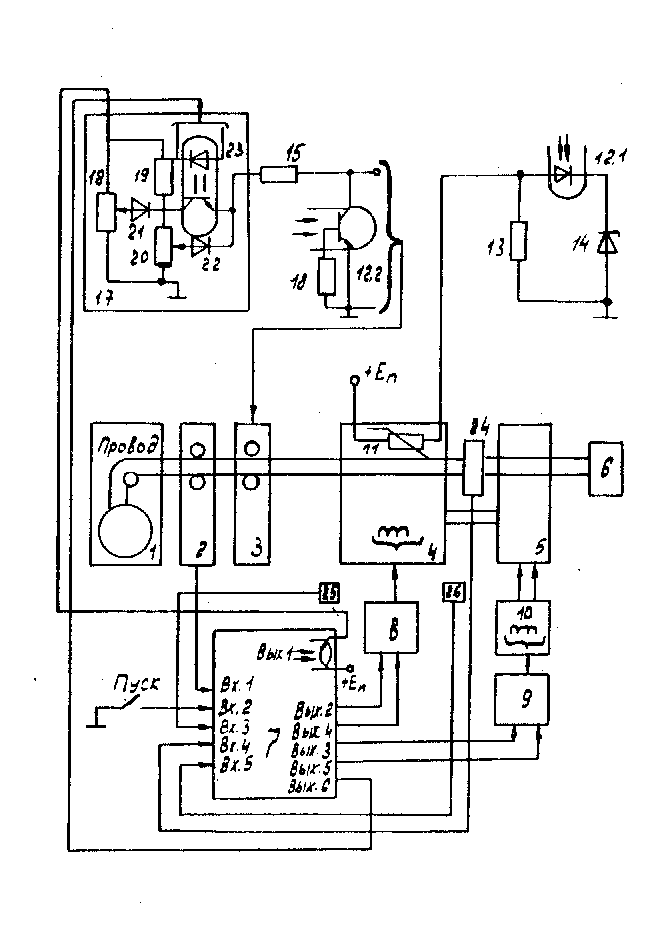
МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СТАНКА ДЛЯ РЕЗКИ И ЗАЧИСТКИ ПРОВОДА, содержащий последовательно соединенные между собой отдающий механизм, датчик перемещения, привод подачи провода, двигатель привода каретки, датчик аварийных перемещений, отрезной механизм и накопитель продукции, выход датчика перемещения соединен с первым входом программного блока, первый и второй выходы программного блока соединены с входом устройства управления привода каретки, выход которого соединен с обмоткой двигателя привода каретки, выход датчика аварийных отключений соединен с вторым входом программного блока, кнопка "Пуск" соединена с третьим входом программного блока, третий и четвертый выходы программного блока соединены с устройством управления двигателя отрезного механизма, выход которого соединен с двигателем отрезного механизма, датчики начального и конечного положения каретки соединены соответственно с четвертым и пятым входами программного блока, отличающийся тем, что, с целью повышения надежности и увеличения производительности, в него введены задатчик скорости в виде резистивного делителя напряжения с входами по малой и большой скорости, три резистора, оптрон и стабилитрон, двигатель привода каретки снабжен терморезистором, пятый и шестой выходы программного блока связаны соответственно с входами задатчика соответственно малой и большой скорости, выход которого через первый резистор соединен с общей точкой соединения клеммы для подключения к приводу подачи привода и с коллектором фототранзистора оптрона, эмиттер которого соединен с другой клеммой для подключения к приводу подачи провода и общей шине, база и эмиттер фототранзистора зашунтированы вторым резистором, первый вывод термотранзистора предназначен для подключения к источнику питания, второй его вывод соединен с анодом светодиода оптрона, катод которого соединен с катодом стабилитрона, анод которого подключен к общей шине и к одному выводу третьего резистора, другой вывод которого соединен с анодом светодиода оптрона.
