Изобретение относится к области приоростроения, в частности к передаточным еханизмам с магнитной связью.
Известен магнитный преобразователь ращательного движения в возвратно-потупательное, содержащий установленное на оси вращения ведущее звено с четным ислом разноименных полюсов магнитов, равномерно расположенных по его периферии вокруг оси вращения, и четное чисо ведомых звеньев, выполненных в виде магнитов, намагниченных в радиальных направлениях преобразователя и размещенных в радйально ориентированных направляющих, равномерно расположенных вдоль окружности, концёнтрично охватывающей ведущее звено, с шагом, равным шагу расположения полюсов магнитов на ведущем звене ; : ; :V
Недостатками известной, конструкции являются ее невысокие надежность и быстродействие устройства, а также качество передаваемого Движения, обусловленные периодически изменяющейся по величине и направлению и воздействующей на ведущее звено результирующей силой, возникающей от тангенциальных сил притяжения или отталкивания между полюсами магнитов ведущего и ведомых звеньев в процессе работы преобразователя.
Цель изобретения - повышение надёжности и быстродействия устройства, а также качества передаваемого движения путем уменьшения результирующей тангенциальных сил.:, .: ; ; ..-..-,- Достижение поставленной цели обеспечивается тем, что в магнитном прёобразо- вателе вращательного , движения в возвратно-поступательное, содержащем ус- тановленнбе на оси вращения ведущее звено с четным числом разноимейных полюсов магнитов, равномерно расположенных по его периферии вокруг оси вращения, и четное число ведомых звеньев, выполненных в виде магнитов, намагниченных в радиальным направлениях преобразователя и размещенных в радйально ориентированных направляющих, равномерно расположенных вдоль окружности, концёнтрично охватывающей ведущее звено, с шагом, равным шагу расположения полюсов магнитов на ведущем звене, число взаимодействующих пар полюсов ведущего и ведомых звеньев равно 4п, где п 1, 2, 3 и т.д.. при этом обращенные друг к другу полюса диаметрально расположенных ведомых звеньев имеют одинаковую полярность, а при распо- ложении полюсов ведомого и ведущих звеньев друг напротив друга половина взаимодействующих пар полюсов имеет одинаковую полярность, а другая половина - разную. ,
В одном из вариантов предлагаемого магнитного преобразователя полюса магнитов ведущего звена расположены с чередованием по окружности вращения по схеме -N-N-S-S-, а взаимодействующие с ними полюса ведомых звеньев-, соответственно, по схеме -N-S-N-S-,
Для исключения паразитной радиальной нагрузки на ось вращения ведущего звена предлагается вариант электромагнитного преобразователя, в котором полюса магнитов ведущего звена расположены с
5 чередованием по окружности вращения по схеме -N-S-N-S-, а взаимодействующие с ними полюса ведомых звеньев - соответственно либо по схеме -N-N-N-N-, либр по схеме -S-S-S-S-,
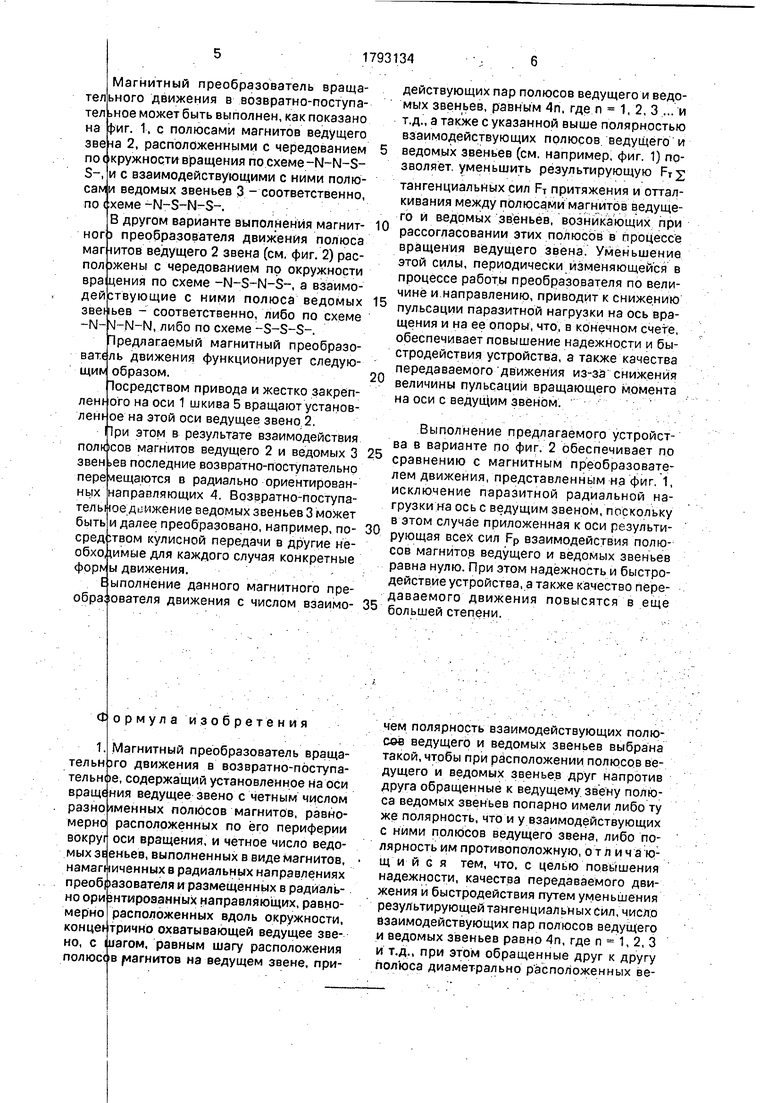
0 На фиг. 1 изображен предлагаемый магнитный преобразователь, поперечный разрез; на фиг, 2 -то же, в варианте преобразователя с скомпенсированной радиальной нагрузкой на ось вращения ведущего
5 звена.
Магнитный преобразователь вращательного движения в возвратно-поступательное состоит из установленного на оси 1 вращения .ведущего звена 2 и взаимодейст0 вующих с ним через воздушные зазоры ведомых звеньев 3, размещенных в радйально Ориентированных направляющих. 4. Для вращения ведомого звена 3 предусмотрен жестко закрепленный на. оси 1 и взаимодей- .
5 ствующий с приводом (на чертеже не показан) шкив 5. Ведущее звено 2 выполнено с разноименными полюсами магнитов, рав- номерно расположенными по его периферии вокруг оси 1 вращения. Ведомые звенья
0 3 представляют собой магниты, намагниченные в радиальных направлениях преобразователя. Направляющие 4 ведомых звеньев 3 расположены равномерно вдоль окружности, концёнтрично охватывающей
5 ведущее звено 2, с шагом, равным шагу расположения полюсов магнитов на ведущем звене 2, Число взаимодействующих пар по-(-у люсов ведущего 2 и ведомых 3 звеньев равно 4п, где п 1, 2, 3,... и т.д.
0 :;; . - - . -
Обращенные друг к другу полюса диаметрально расположенных ведомых звеньев 3 имеют одинаковую полярность. Полярность взаимодействующих полюсов 5 ведущего 2 и. ведомых 3 звеньев выбрана такой, чтобы при расположении полюсов ведущего 2 и ведомых 3 звеньев друг напротив друга половина взаимодействующию пар полюсов имела бы одинаковую полярность, а другая половина - разную.
Магнитный преобразователь вращательного движения в возвратно-поступа- тел ное может быть выполнен, как показано на . 1, с полюсами магнитов ведущего звена 2, расположенными с чередованием not кружное™ вращения по схеме -N-N-S- S-, и с взаимодействующими с ними полюсами ведомых звеньев 3 - соответственно, по схеме -N-S-N-S-.
В другом варианте выполнения магнитного преобразователя движения полюса магнитов ведущего 2 звена (см. фиг. 2) расположены с чередованием по окружности вращения по схеме -N-S-N-S-, а взаимодействующие с ними полюса ведомых звеньев - соответственно, либо по схеме -N- M-.N-N, либо по схеме -S-S-S-.
Тредлагаемый магнитный преобразователь движения функционирует следующие образом.
Посредством привода и жестко закреплен ого на оси 1 шкива 5 вращают установ- ленюе на этой оси ведущее звено 2.
Три этом в результате взаимодействия полюсов магнитов ведущего 2 и ведомых 3 звен ев последние возвратно-поступательно переиещаются в радиально ориентированных направляющих 4. Возвратно-поступательное движение ведомых звеньев 3 может быть и далее преобразовано, например, посредством кулисной передачи в другие необходимые для каждого случая конкретные формы движения.выполнение данного магнитного преобразователя движения с числом взаимодействующих пар полюсов ведущего и ведомых звеньев, равным 4п, где п 1,2, 3 ... и т.д., а также с указанной выше полярностью взаимодействующих полюсов, ведущего и ведомых звеньев (см. например, фиг. 1) позволяет, уменьшить результирующую FTЈ
тангенциальных сил FT притяжения и отталкивания между полюсами магнитов ведущего и ведомых звеньев, возникающих при
рассогласовании этих полюсов в процессе
вращения ведущего звена. Уменьшение этой силы, периодически изменяющейся в процессе работы преобразователя по величине и.направлению, приводит к снижению пульсации паразитной нагрузки на ось вращения и на ее опоры, что, в конечном счете, обеспечивает повышение надежности и быстродействия устройства, а также качества передаваемого движения из-за снижения величины пульсаций вращающего момента на оси с ведущим звеном.
Выполнение предлагаемого устройства в варианте по фиг. 2 обеспечивает по
сравнению с магнитным преобразователем движения, представленным на фиг. 1, исключение паразитной радиальной нагрузки на ось с ведущим звеном, поскольку в этом случае приложенная к оси результирующая всех сил Fp взаимодействия полюсов магнитов ведущего и ведомых звеньев равна нулю. При этом надежность и быстродействие устройства, а также качество передаваемого движения повысятся в еще
большей степени.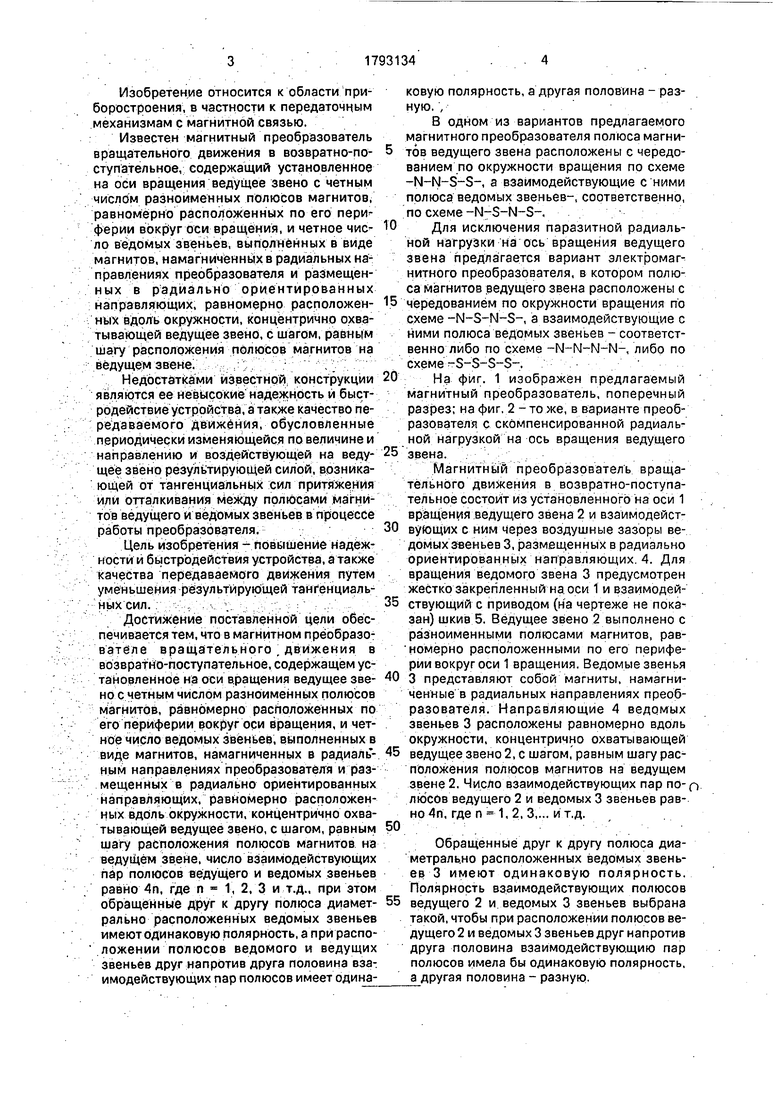
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для очистки изделий | 1980 |
|
SU1069201A1 |
| ГЕРМЕТИЧНЫЙ ЦЕНТРОБЕЖНЫЙ НАСОС | 1995 |
|
RU2088807C1 |
| СИНХРОННЫЙ МАГНИТНЫЙ РЕДУКТОР-МУЛЬТИПЛИКАТОР УЗЯКОВА | 2015 |
|
RU2579756C2 |
| Вибрационное устройство для смесителей | 1980 |
|
SU1028385A1 |
| СООСНЫЙ МАГНИТНЫЙ РЕДУКТОР-МУЛЬТИПЛИКАТОР УЗЯКОВА | 2015 |
|
RU2579443C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МАГНИТНОГО ПРИВОДА | 2015 |
|
RU2610139C1 |
| Предохранительная фрикционная муфта | 1990 |
|
SU1754966A1 |
| Устройство для преобразования колебательного движения в реверсивное поступательное | 1986 |
|
SU1372129A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ В РЕВЕРСИВНОЕ ВРАЩАТЕЛЬНОЕ | 2005 |
|
RU2279594C1 |
| УСТРОЙСТВО С МАГНИТНЫМ ВЗАИМОДЕЙСТВИЕМ ДЛЯ ПЕРЕМЕШИВАНИЯ ЖИДКОСТИ | 1999 |
|
RU2222372C2 |
ормул а изобретения
расположенных вдоль окружности,
конце рично охватывающей ведущее звено, с тагом, равным шагу расположения полюсов магнитов на ведущем звене, причем полярность взаимодействующих полю- о&в ведущего и ведомых звеньев выбрана такой, чтобы при расположении полюсов ведущего и ведомых звеньев друг напротив друга обращенные к ведущему звену полюса ведомых звеньев попарно имели либо ту же полярность, что и у взаимодействующих с ними полюсов ведущего звена, либо полярность им противоположную, от л и чающий с я тем, что, с целью повышения надежности, качества передаваемого движения и быстродействия путем уменьшения результирующей тангенциальных сил, число взаимодействующих пар полюсов ведущего и ведомых звеньев равно 4п, где п 1, 2, 3 и т.д., при этом обращенные друг к другу полюса диаметрально расположенных еедомых звеньев имеют одинаковую полярность, а при расположении полюсов ведомого и ведущих звеньев друг напротив друга половина взаимодействующих пар полюсов имеет одинаковую полярность, а другая половина-разную.
2, Преобразователь пап, 1, о т л и ч а ю- щ и и с я тем, что полюса магнитов ведущего звена расположены с чередованием по окг ружностй вращения по схеме -N-N-S-S-, а взаимодействующие с ними полюса ведомых звеньев соответственно по схеме -N- S-N-S-.
