Изобретение относится к грузоподъемной технике, в частности к устройствам регулирования положения груза. .
Известно устройство для управления грузоподъемным механизмом со стрелой, содержащее блок оптических излучателей, в зоне действия которого расположен блок фотоприемников, подключенный выходами к входам блока определения ошибки позиционирования, выходы которого подключе- ны к управляющим входам привода подъема и поворота стрелы.
Недостатком известного устройства является недостаточно высокая точность.
Цель изобретения - повышение точно- сти установки конструкции на место монтажа.
Цель достигается тем, что в устройстве для управления грузоподъемным механизмом блоки оптических излучателей и фото- приемников включают в себя по крайней мере три группы излучателей и фотоприем- ников, первые из которых установлены на пути, а вторые, выходами которых образованы соответственно первый, второй и третий выходы блока, соединенные с соответствующими входами блока определения ошибки позиционирования, - на боковых продольных и поперечной поверхностях конструкций, а блок определения ошибки позиционирования включает в себя триггер контроля высоты подвеса конструкции, триггеры контроля положения боковой продольной и боковой поперечной поверхностей конструкции и элементы И, выходом одного из которых образован первый выход блока, а входы первого элемента И подключены соответственно к выходу триггера контроля высоты подвеса конструкции, входом которого образован вход блока, соединен- ный с первым выходом блока фотоприемников, и к выходу второго элемента И, входы которого соединены с выходом триггера контроля положения боковой продольной поверхности конструкции, выходом которо- го образован второй выход блока, а входом образован второй вход блока, и с выходом триггеров контроля положения боковой поперечной поверхности конструкции, входами которых образован третий вход блока, а выходом - второй выход.
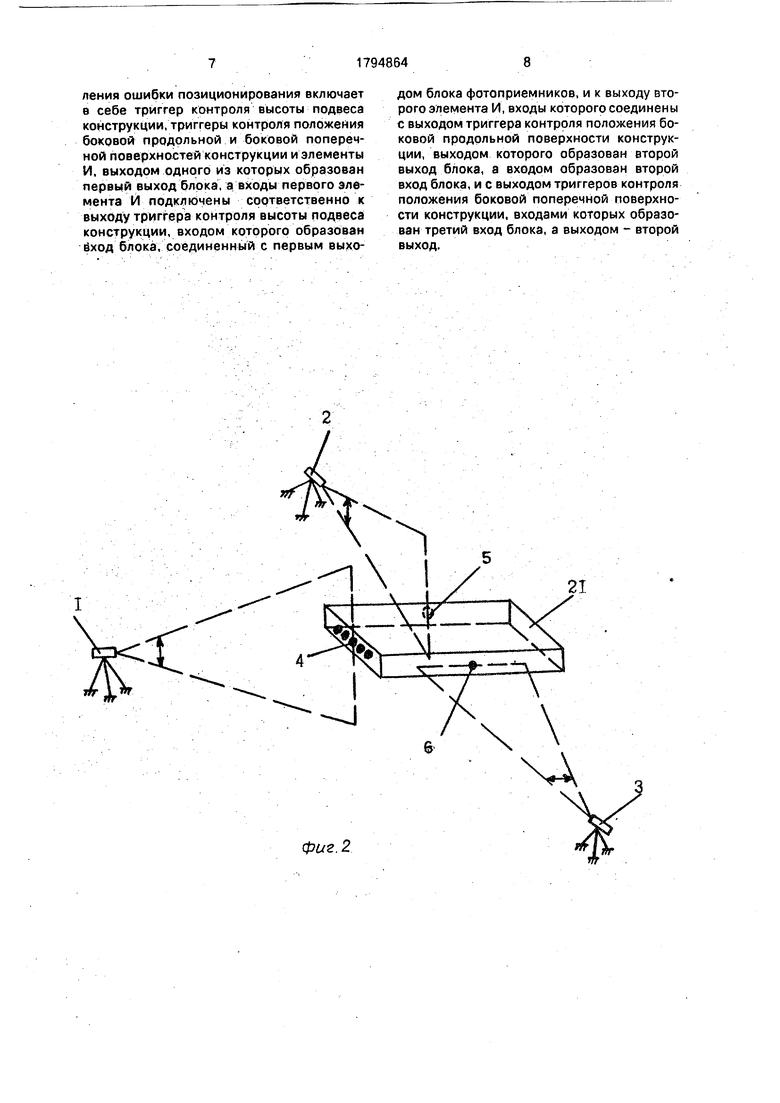
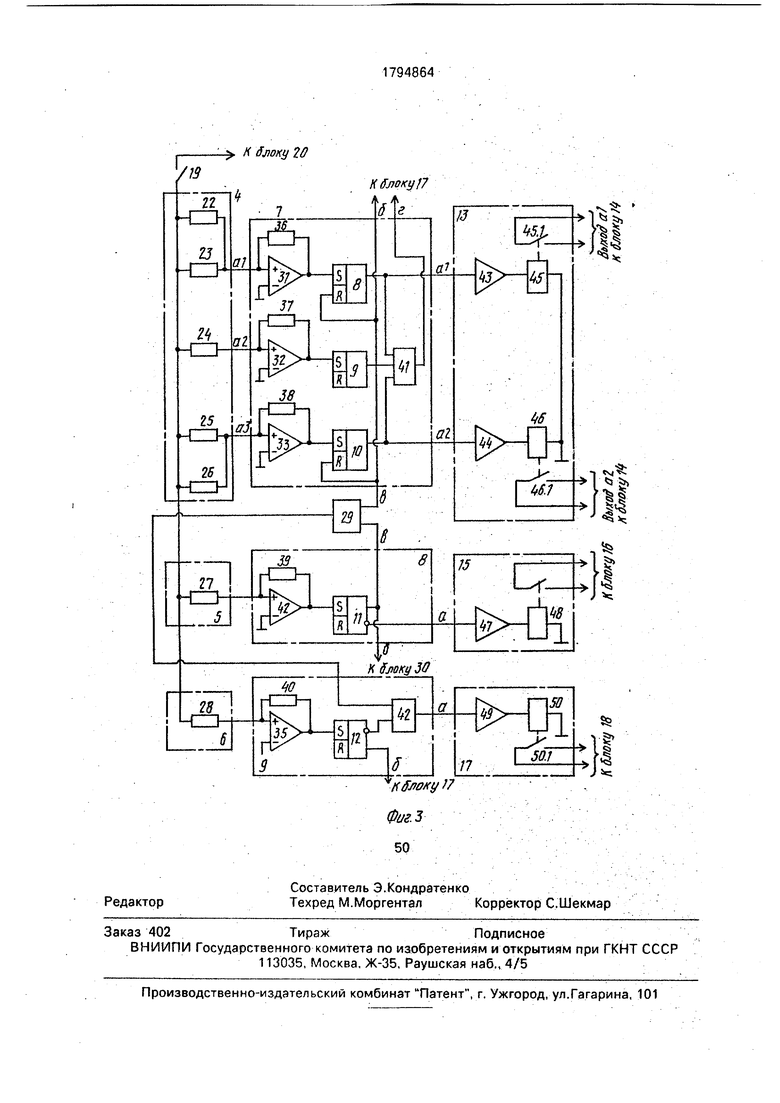
На фиг. 1 изображена структурная схема устройства; на фиг. 2 - установка излучателей и фотоприемников; на фиг, 3 принципиальная схема устройства.
Устройство содержит излучатели 1,2, 3 - блок оптических излучателей, связанные с тремя фотоприемниками 4, 5, 6 - блок фотоприемников. Выходы фотоприемникэ 4 связаны с входами блока 7 определения
ошибки позиционирования, включающего в себя триггеры 8, 9, 10 контроля положения боковой поперечной поверхности конструкции/триггер 11 контроля положения боковой продольной поверхности конструкции и триггер 12 контроля высоты подвеса конструкции (на фиг. 1 триггеры показаны без других элементов блока 7, который раскрыт на фиг. 3), исполнительный элемент 13, через который блок 7 связан с приводом 14 поворота стрелы; исполнительный элемент 15, через который триггер 11 связан с приводом 16 малых перемещений крана, и исполнительный механизм 17, через который триггер 12 связан с приводом 18 подъема стрелы.
На фотоприемники 4, 5, 6 электропитание подается через выключатель 19 автоматического режима от источника 20 постоянного напряжения.
Фотоприемники 4,5, б устанавливаются на конструкции 21 так, что при совпадении оптических плоскостей, задаваемых излучателями 1, 2, 3 с центрами соответствующих фотоприемников 4, 5, 6 положение конструкции 21 соответствует монтажному.
Фотоприемник 4 состоит из нечетного числа одинаковых фоторезисторов 22, 23, 24, 25,26, причем фоторезистор 24 располагается в центре фотоприемника, фоторезисторы 22 и 23 - справа от центра, фоторезисторы 25, 26 - слева от центра.
Фотоприемник 5 включает в себя фото- резистор 27, фотоприемник 6 - фоторезистор 28.
Выходы блока 7 соединены с входами элемента 29 И, а выходы блока.7 соединены также с блоком 30 индикации,
Блок 7, кроме триггеров 8, 9, 10, 11, 12, включает в себя операционные усилители 31, 32, 33, 34, 35, резисторы 36, 37, 38, 39, 40, элемент 41 ИЛИ и элемент 42 И; иепол-. нительный элемент 13 включает в себя два усилителя 43, 44 напряжения и реле 45 с контактом 45,1 и реле 46 с контактом 46.1; исполнительный элемент 15 включает в себя усилитель 47 и реле 48 с контактом 48.1, исполнительный элемент 17 включает в себя усилитель 49 и реле 50 с контактом 50.1,
Устройство работает следующим образом.
Конструкция 21 с установленными на ней фотоприемниками 4, 5, 6 доставляются к месту монтажа. Машинист замыкает выключатель 19, подавая питание от источника 20 на схему.
Затем машинист, управляя вручную приводом 14, добивается попадания светового потока излучателя 1 на один из фоторезисторов 22-26 фотоприемника 4. Контроль осуществляется по блоку 30 индикации.
Дальнейшее регулирование поперечного положения конструкции 21 осуществляется в автоматическом режиме. В этом случае, если конструкция оказалась смещенной влево относительно заданного положения, поло жения, определяемого излучателем 1, световой поток попадает на один из фоторезисторов 22 или 23, находящихся справа от центра .фотоприемника 4. Это вызывает резкое снижение сопротивления облучаемого фоторезистора и возрастание тока, протекающего через него, При этом напряжение на выходе операционного усилителя 31 также возра- стает, что соответствует логической 1, и вызывает установку триггера 8 в единичное состояние,.
Единичный выходной сигнал триггера 8 поступает на вход элемента 41 ИЛИ, при этом на его выходе также появляется сигнал лог. 1, который подается на блок 30 для извещения машиниста о попадании светового потока излучателя 1 на фотоприемник 4. Кроме того, этим сигналом через усили- тель43 включается реле 45, замы кается контакт 45.1 и включается привод 14 поворота стрелы. Поворот стрелы осуществляется до тех пор, пока конструкция 21 не займет требуемого положения в поперечном направ- лении. В этом случае световой поток излучателя 1 попадает на фоторезистор 24, расположенный в центре фотоприемника, на выходе усилителя 32 возникает сигнал, который устанавливает триггер 9 в единич- ное состояние. Выходной сигнал триггера 9 подается на вход триггера 8 и переводит его в нулевое состояние, что вызывает обесто- чивание реле 45, размыкание контакта 45.1 и выключение привода 14. Кроме того, сиг- нал с выхода триггера 9 поступает на вход элемента 29 И, а -также на блок 30 для сообщения машинисту о том, что конструкция 21 заняла требуемое положение в поперечном направлении.
В случае смещения конструкции вправо работают фоторезисторы 25, 26, усилитель
33, триггер 10, усилитель 44, реле 46 и контакт 46.1.
Аналогично рассмотренному выше процессу регулирования поперечного положения конструкции производится регулирование продольного положения конструкции. В момент перехода на автоматическое управление световой поток от излучателя 2 не попадает на фотоприемник 5. На выходе усилителя 34 устанавливается нулевой сигнал,триггер 11 остается в нулевом положении, а на инверсном его выходе имеется единичный сигнал, через усилитель 47 включающий реле 48, контактом 48.1 которого включается привод 16, и кран начинает смещаться вместе с конструкцией 21. Как только продольное положение конструкции 21 совпадает с требуемым, световой поток излучателя 2 попадает на фоторезистор 27, на выходе усилителя 34 возникает сигнал. Этот сигнал поступает на триггер 11, переводит его в единичное состояние, реле 48 обесточивается, размыкается контакт 48. 1, и кран останавливается. Сигнал подается на блок 30 и на вход элемента 29. Если на обоих входах элемента 29 присутствуют сигналы, то на его выходе появляется сигнал разрешения опускания груза, который поступает на вход элемента 42.
При поднятом грузе световой поток излучателя 3 не попадает на фоторезистор 28 фотоприемника 6, поэтому сигнал на выходе усилителя 35 имеет нулевой уровень, триггер 12 также находится в нулевом состоянии. Единичный сигнал с. его инверсного выхода подается на другой вход элемента 42 И, его выходной сигнал принимает единичное значение и через усилитель 49 включает реле 50, контактом 50.1 которого включается привод 18.
При совпадении высоты подвеса конструкции с заданной происходит облучение фоторезистора 28, выходной сигнал усилителя 35 принимает единичное состояние. Этот сигнал подается на вход триггера 12 и переводит его в единичное состояние. Сигнал на его инверсном выходе принимает нулевое значение, реле 50 обесточивается,
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЯВЛЕНИЯ В РАБОЧЕЙ ЗОНЕ КРАНА ЧЕЛОВЕКА | 2004 |
|
RU2266859C1 |
| Устройство для прицельной установки груза подъемно-транспортным средством | 1989 |
|
SU1816732A1 |
| СЕЛЕКТОР БУКС ПО ТИПУ ПОДШИПНИКА НА ПОДВИЖНОМ СОСТАВЕ | 1973 |
|
SU384716A1 |
| Устройство для считывания информации с транспортного средства | 1989 |
|
SU1765047A1 |
| Устройство для контроля положения деталей в зоне автосцепки вагонов | 1990 |
|
SU1794734A1 |
| УСТРОЙСТВО ДЛЯ ПОДСЧЕТА ЧИСЛА ЛЮДЕЙ В КОНТРОЛИРУЕМОЙ ЗОНЕ | 1989 |
|
RU2018959C1 |
| Устройство для автоматической фокусировки оптической системы записи-воспроизведения информации | 1990 |
|
SU1802877A3 |
| ОПТИЧЕСКИЙ АБСОРБЦИОННЫЙ ГАЗОАНАЛИЗАТОР | 1996 |
|
RU2109269C1 |
| Следящий уровнемер | 1987 |
|
SU1553841A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ | 1995 |
|
RU2121713C1 |
Использование: в области грузоподъемной техники. в частности при регулировании положения груза. Сущность изобретения: устройство содержит излучатели 1, 2, 3, фотоприемники 4, 5, 6, блок определения ошибки позиционирования 7, элемент И 29, исполнительные элементы 13, 15, 17, блок индикации 30, привод поворота 14, привод подъема 18, источник постоянного напряжения 20, выключатель 19 автоматического режима, привод малых перемещений 16. 2Q 19 - 6; 19 - 4; 19 - 7;19 - 5; 19 - 16 - 3 - 6 - 7 - 17 - 18; 7 - 30; - 7 - 15 - 16; 29 - 7; 1 - 4 - 14, Зил.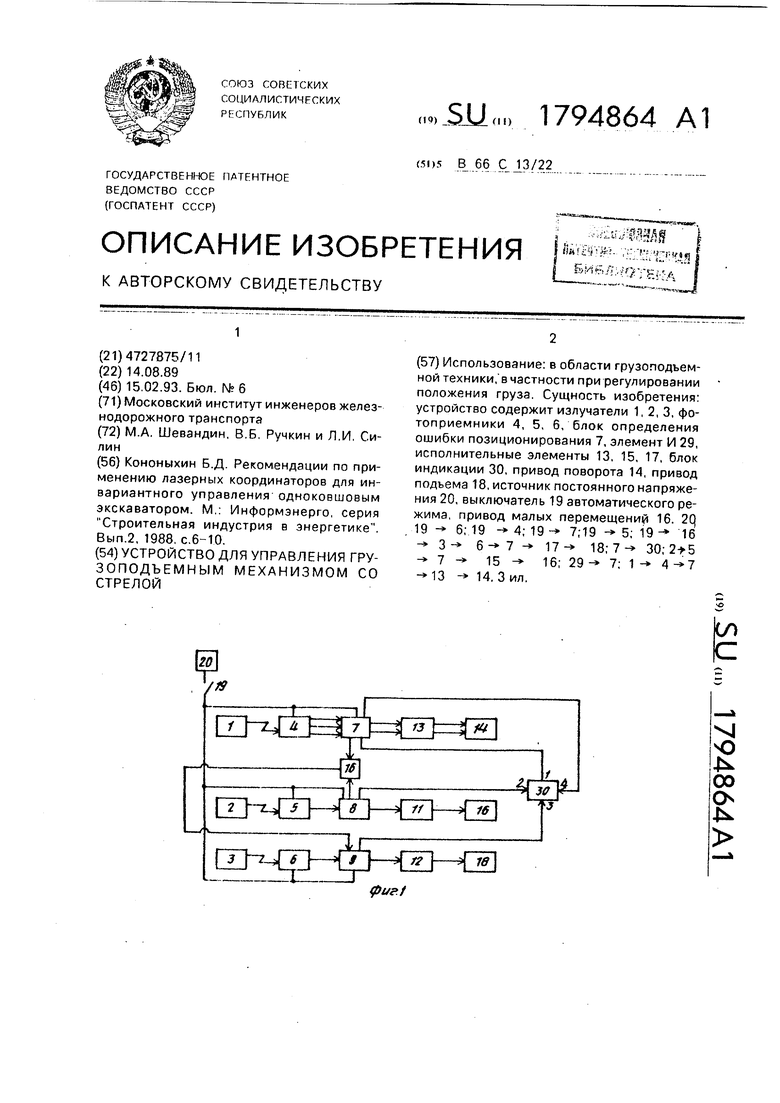
Формула изобретения Устройство для управления грузоподъемным механизмом со стрелой, содержащее блок оптических излучателей, в зоне действия которого расположен блок фотоприемников, подключенный выходами к входам блока определения ошибки позиционирования, выходы которого подключены к управляющим входам привода подъема и поворота стрелы, о тличающееся тем, что, с целью повышения точности установки
конструкции на место монтажа, блоки оптических излучателей и фотоприемников включают в себя по крайней мере три группы излучателей и фотоприемников, первые из которых установлены на пути, а вторые, выходами которых образованы соответственно первый, второй и третий выходы блока, соединены с соответствующими входами блока определения ошибки позиционирования на боковых продольных испоперечной поверхностях конструкции, а блок определения ошибки позиционирования включает в себе триггер контроля высоты подвеса конструкции, триггеры контроля положения боковой продольной и боковой поперечной поверхностей конструкции и элементы И, выходом одного из которых образован первый выход блока, а входы первого элемента И подключены соответственно к выходу триггера контроля высоты подвеса конструкции, входом которого образован йход блока, соединенный с первым выходом блока фотоприемников, и к выходу второго элемента И, входы которого соединены с выходом триггера контроля положения боковой продольной поверхности конструкции, выходом которого образован второй выход блока, а входом образован второй вход блока, и с выходом триггеров контроля положения боковой поперечной поверхности конструкции, входами которых образован третий вход блока, а выходом - второй выход.
| Кононыхин Б.Д | |||
| Рекомендации по применению лазерных координаторов для инвариантного управления одноковшовым экскаватором | |||
| М.: Информэнерго, серия Строительная индустрия в энергетике | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
