11
2.1 J7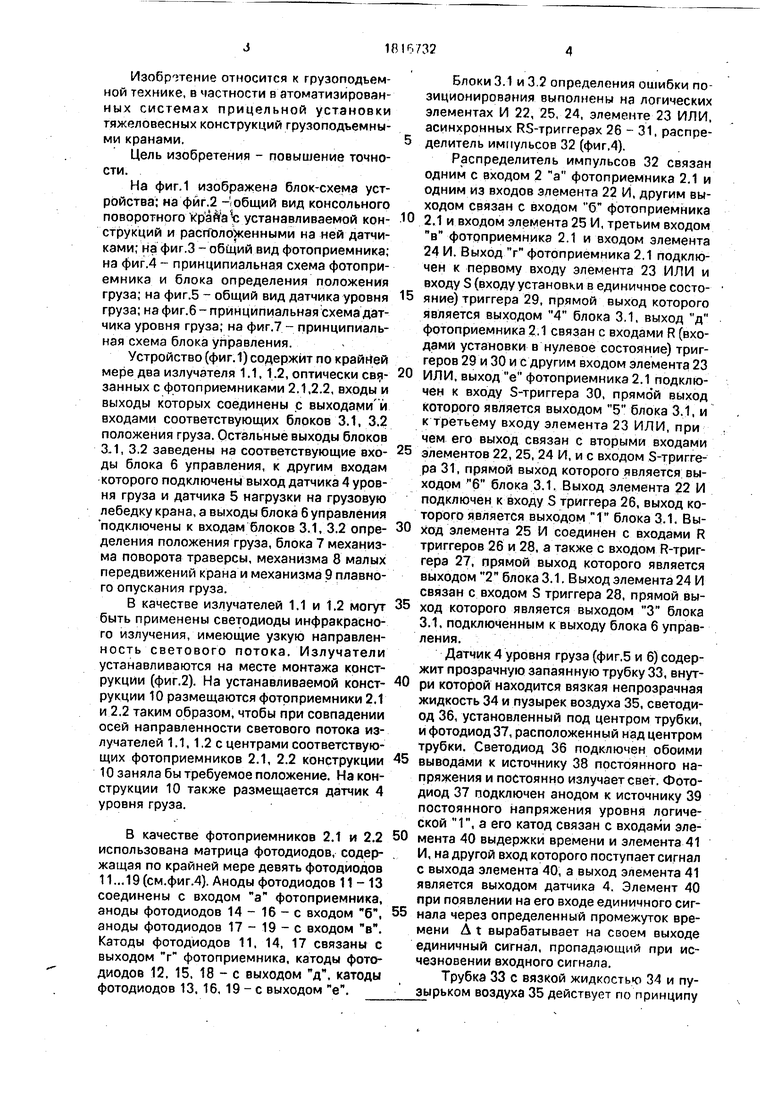
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости и координат метаемого тела | 2022 |
|
RU2790534C1 |
| Устройство для управления грузоподъемным механизмом со стрелой | 1989 |
|
SU1794864A1 |
| Устройство для обнаружения неисправных элементов подвижного состава | 1990 |
|
SU1794738A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1247331A1 |
| ГИБРИДНАЯ ЯЧЕЙКА ОПТОЭЛЕКТРОННОГО НЕЙРОПРОЦЕССОРА | 1992 |
|
RU2057363C1 |
| Устройство для предотвращения столкновения грузоподъемного крана с препятствием | 1990 |
|
SU1808808A1 |
| Переключатель линий | 1981 |
|
SU974585A1 |
| Устройство приоритетного доступа к магистрали | 1990 |
|
SU1839249A1 |
| Преобразователь перемещения в код | 1984 |
|
SU1203702A1 |
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ СУДНА С ПОМОЩЬЮ РУЛЯ | 2018 |
|
RU2707480C1 |
Использование: грузоподъемная техника, в частности автоматизированные системы прицельной установки тяжеловесных конструкций грузоподъемными кранами. Сущность изобретения: устройство содержит 2 излучатели 1.1, 1,2; 2 фотоприемника 2.1, 2.2; 2 блока определения положения груза 3,1, 3.1; 1 датчик уровня груза 4; 1 датчик нагрузки на грузовую лебедку урана 5; 1 блок управления 6; 1 блок механизма поворота траверсы 7; 1 механизм 8 малых передвижений крана; 1 механизм S плавного опускания груза. 1.1 - 2.1 - 3.1 - 6 - 7; 1.2 - 2.2 -.3.2 - 6; 4 - 6; 5 - 6. 7 ил.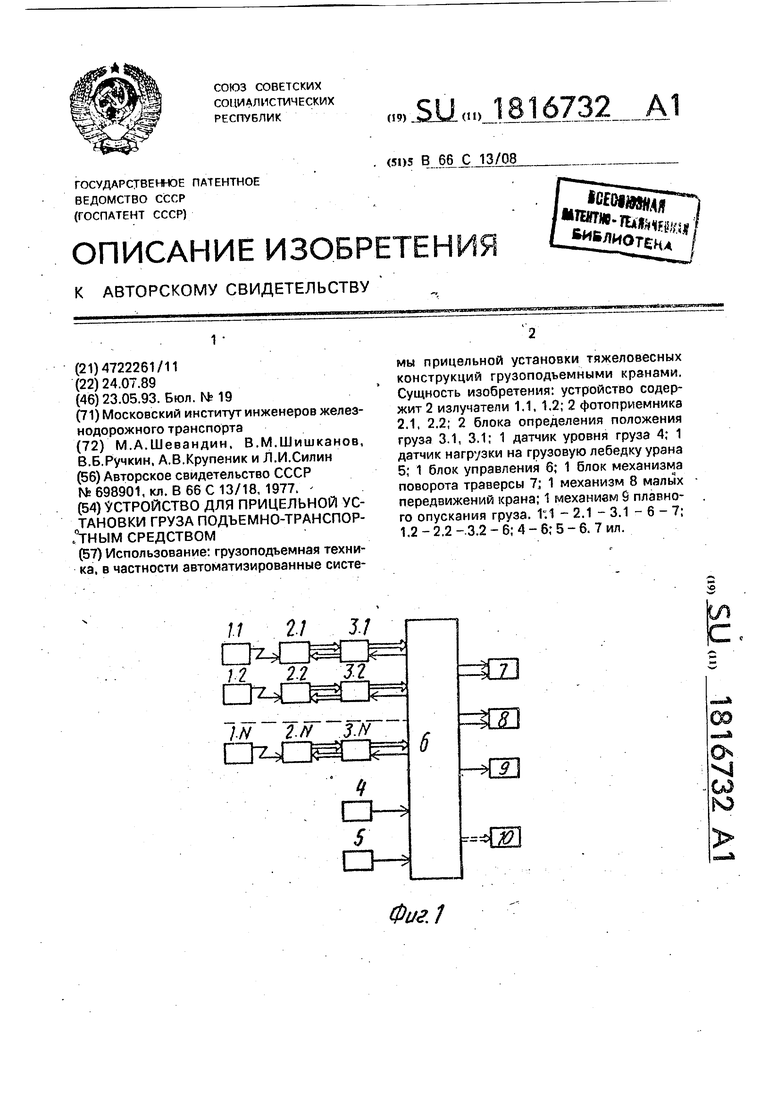
12 Jl
DNH
4
СМ
5
см
32
ЗШ
Фие.1
Изобретение относится к грузоподъемной технике, в частности в атоматиэирован- ных системах прицельной установки тяжеловесных конструкций грузоподъемными кранами.
Цель изобретения - повышение точности.
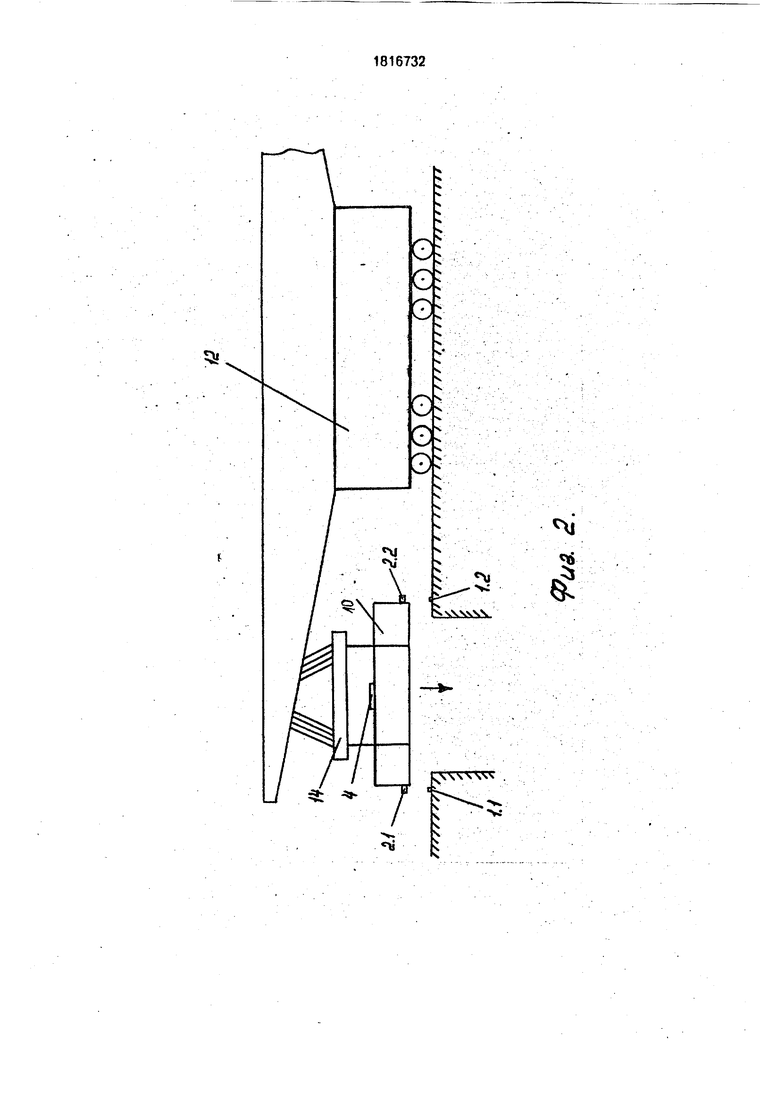
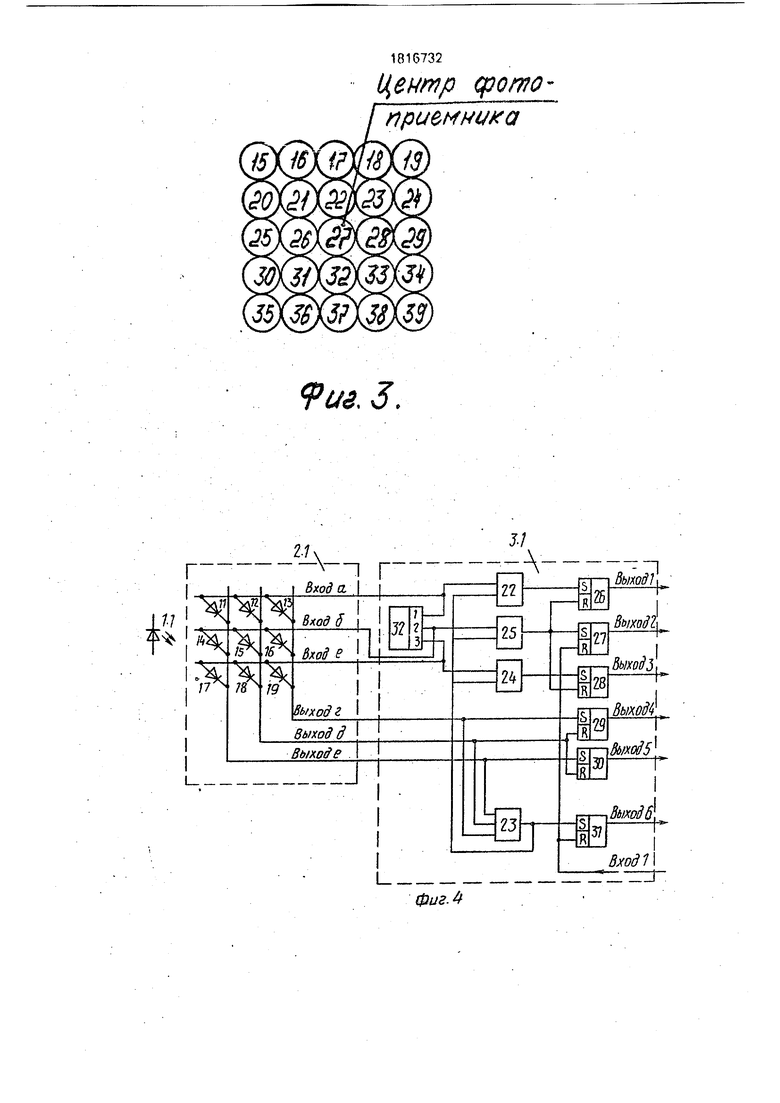
На фиг.1 изображена блок-схема устройства: на фйг.2 - общий вид консольного поворотного КраЙ аЪ устанавливаемой конструкций и расположенными на ней датчиками; на фиг.3 - общий вид фотоприемника; на фиг.4 - принципиальная схема фотоприемника и блока определения положения груза; на фиг.5 - общий вид датчика уровня груза; на фиг.6-принципиальная схема датчика уровня груза; на фиг.7 - принципиальная схема блока управления.Устройство (фиг. 1) содержит по крайней мере два излучателя 1.1,1.2, оптически связанных с фотоприемниками 2.1,2.2, входы и выходы которых соединены с выходами и входами соответствующих блрков 3.1, 3.2 положения груза. Остальные выходы блоков 3.1, 3.2 заведены на соответствующие входы блока 6 управления, к другим входам которого подключены выход датчика 4 уровня груза и датчика 5 нагрузки на грузовую лебедку крана, а выходы блока 6 управления подключены к входам блрков 3.1, 3.2 определения положения груза, блока 7 механизма поворота траверсы, механизма 8 малых передвижений крана и механизма 9 плавного опускания груза.
В качестве излучателей 1.1 и 1.2 могут быть применены светодиоды инфракрасного излучения, имеющие узкую направленность светового потока. Излучатели устанавливаются на месте монтажа конструкции (фиг.2). На устанавливаемой конструкции 10 размещаются фотрприемники 2.1 и 2.2 таким образом, чтобы при совпадении осей направленности светового потока излучателей 1.1,1,2 с центрами соответствующих фотоприемников 2.1, 2.2 конструкции 10 заняла бы требуемое положение. На конструкции 10 также размещается датчик 4 уровня груза.
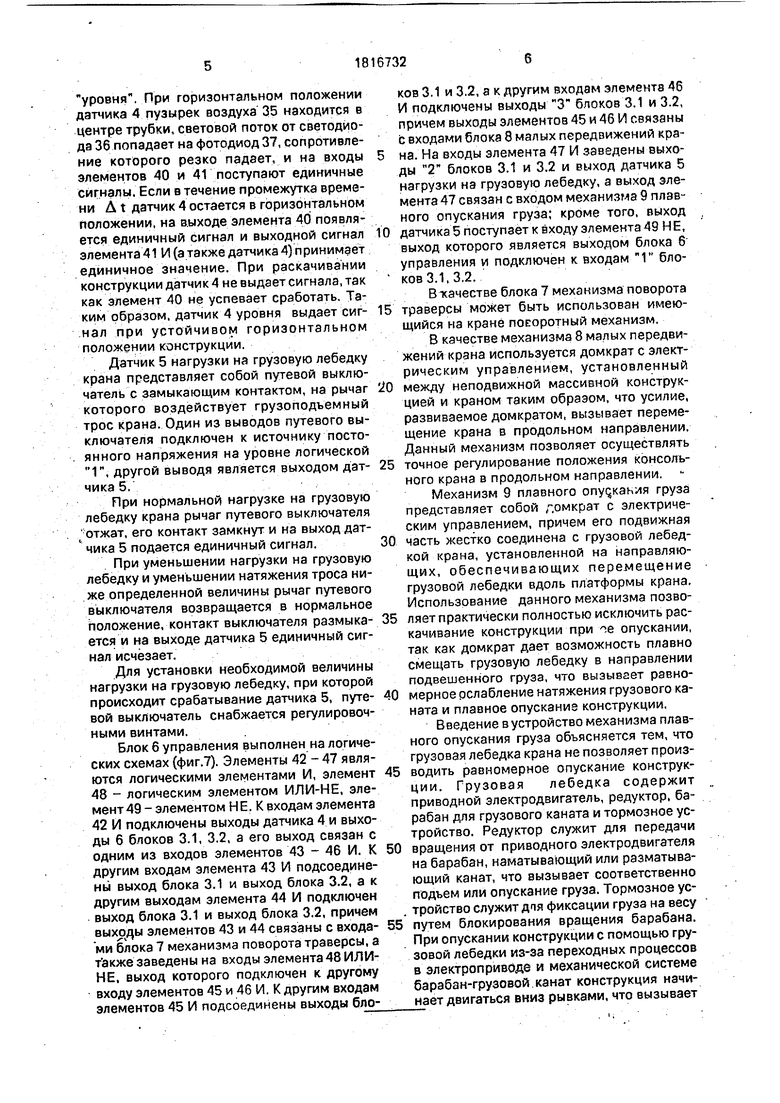
В качестве фотоприемников 2.1 и 2.2 использована матрица фотодиодов, содержащая по крайней мере девять фотодиодов 11... 19 (см.фиг.4). Аноды фотодиодов 11-13 соединены с входом а фотоприемника, аноды фотодиодов 14 - 16 - с входом б, аноды фотодиодов 17 - 19 - с входом в. Катоды фотодиодов 11, 14, 17 связаны с выходом г фотоприемника, катоды фотодиодов 12, 15. 18 - с выходом д, катоды фотодиодов 13, 16, 19 - с выходом е.
Блоки 3.1 и 3.2 определения ошибки позиционирования выполнены на логических элементах И 22, 25, 24, элементе 23 ИЛИ. асинхронных RS-триггерах 26-31. распределитель импульсов 32 (фиг.4).
Распределитель импульсов 32 связан одним с входом 2 а фотоприемника 2.1 и одним из входов элемента 22 И, другим выходом связан с входом б фотоприемника
0 2.1 и входом элемента 25 И, третьим входом в фотрприемникэ 2.1 и входом элемента 24 И. Выход г фотоприемника 2,1 подключен к первому входу элемента 23 ИЛИ и входу S (входу установки в единичное состо5 яние) триггера 29, прямой выход которого является выходом 4 блока 3.1, выход д фотоприемника 2,1 связан с входами R (входами установки в нулевое состояние) триггеров 29 и 30 и с другим входом элемента 23
0 ИЛИ, выход е фотоприемника 2.1 подключен к входу S-триггера 30, прямой выход которого является выходом 5 блока 3.1, и к третьему входу элемента 23 ИЛИ, при чем его выход связан с вторыми входами
5 элементов 22, 25, 24 И, и с входом S-триггера 31, прямой выход которого является; выходом 6 блока 3.1. Выход элемента 22 И подключен к входу S триггера 26, выход которого является выходом 1 блока 3.1. Вы0 ход элемента 25 И соединен с входами R триггеров 26 и 28, а также с входом R-триг- гера 27, прямой выход которого является выходом 2 блока 3.1. Выход элемента 24 И связан с входом S триггера 28, прямой вы5 ход которого является выходом 3 блока 3.1, подключенным к выходу блока 6 управления.
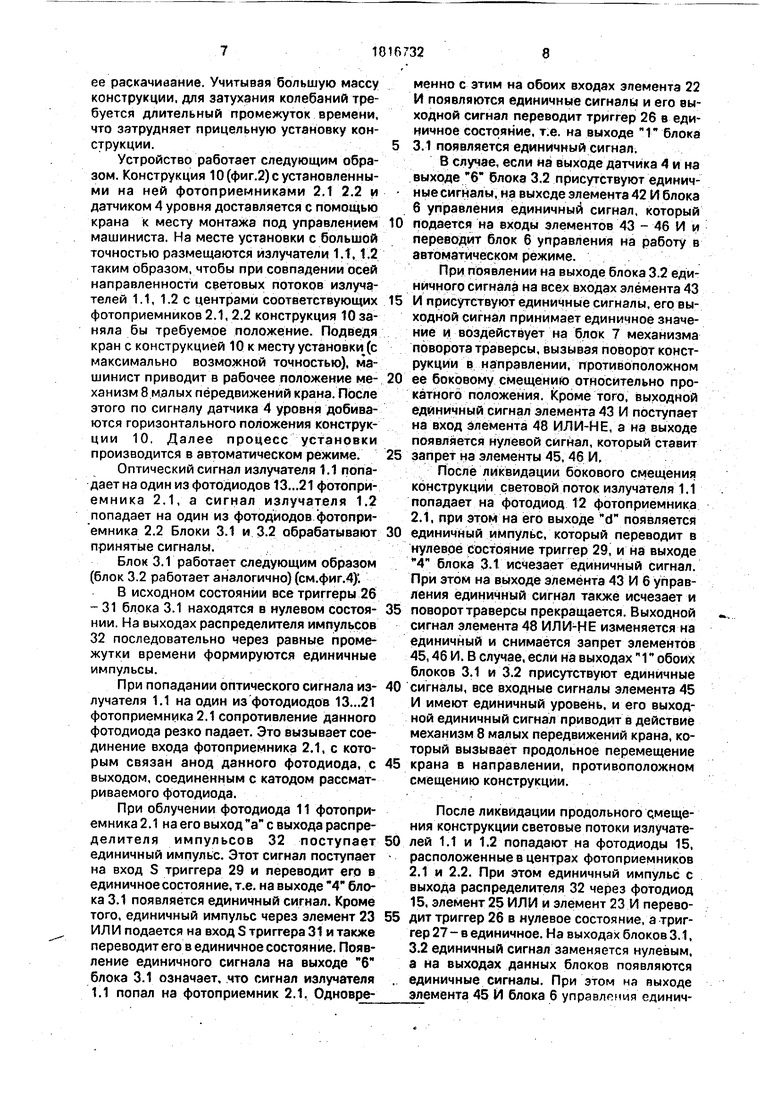
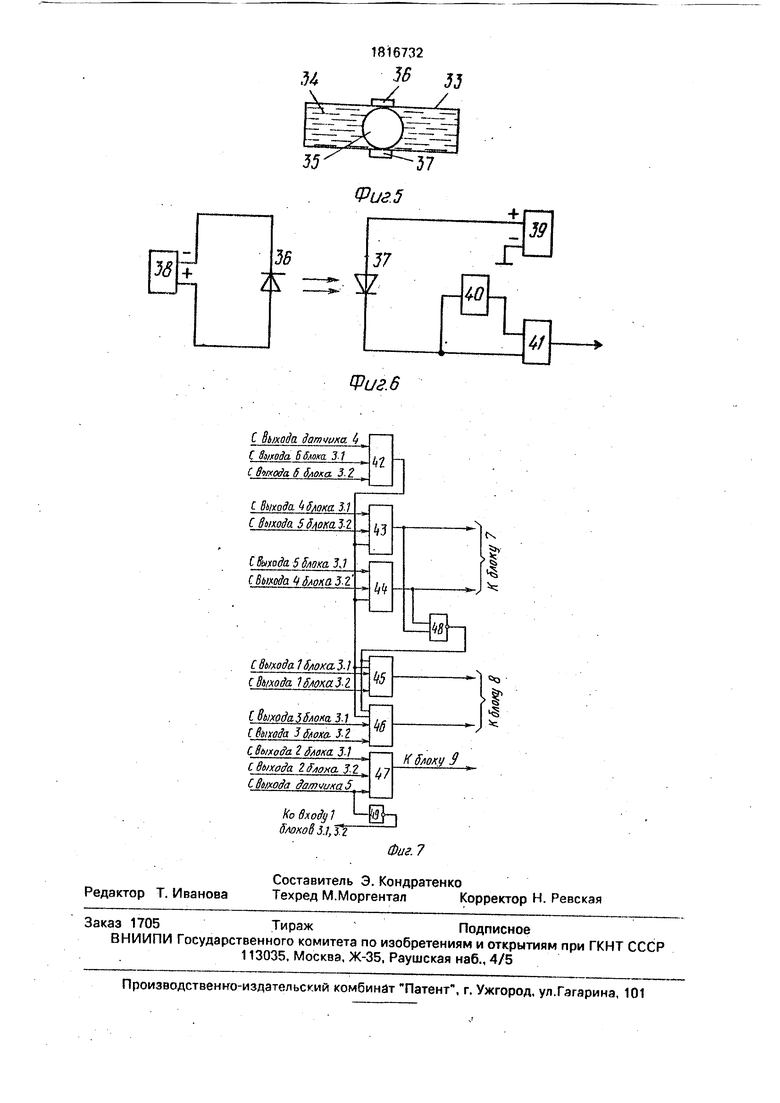
Датчик 4 уровня груза (фиг.5 и 6) содержит прозрачную запаянную трубку 33, внут0 ри которой находится вязкая непрозрачная жидкость 34 и пузырек воздуха 35, светоди- од 36, установленный под центром трубки, и фотодиод 37, расположенный над центром трубки. Светодиод 36 подключен обоими
5 выводами к источнику 38 постоянного напряжения и постоянно излучает свет. Фотодиод 37 подключен анодом к источнику 39 постоянного напряжения уровня логической Г, а его катод связан с входами эле0 мента 40 выдержки времени и элемента 41 И, на другой вход которого поступает сигнал с выхода элемента 40, а выход элемента 41 является выходом датчика 4. Элемент 40 при появлении на его входе единичного сиг5 нала через определенный промежуток времени A t вырабатывает на своем выходе единичный сигнал, пропадающий при исчезновении входного сигнала.
Трубка 33 с вязкой жидкостью 34 и пузырьком воздуха 35 действует по принципу
уровня. При горизонтальном положении датчика 4 пузырек воздуха 35 находится в центре трубки, световой поток от светодйо- да 36 попадает на фотодиод 37, сопротивление которого резко падает, и на входы элементов 40 и 41 поступают единичные сигналы. Если в течение промежутка времени At датчик4остается в горизонтальном положении, на выходе элемента 40 появляется единичный сигнал и выходной сигнал элемента 41 И (а также датчика 4) принимает единичное значение. При раскачивании конструкции датчик 4 не выдает сигнала, так как элемент 40 не успевает сработать. Таким образом, датчик 4 уровня выдает сигнал при устойчивом горизонтальном положении конструкции.
Датчик 5 нагрузки на грузовую лебедку крана представляет собой путевой выключатель с замыкающим контактом, на рычаг которого воздействует грузоподъемный трос крана. Один из выводов путевого выключателя подключен к источнику постоянного напряжения на уровне логической 1, другой выводя является выходом датчика 5.
При нормальной нагрузке на грузовую лебедку крана рычаг путевого выключателя отжат, его контакт замкнут и на выход датчика 5 подается единичный сигнал.
Приуменьшении нагрузки на грузовую лебедку и уменьшении натяжения троса ниже определенной величины рычаг путевого выключателя возвращается в нормальное положение, контакт выключателя размыкается и на выходе датчика 5 единичный сигнал исчезает.
Для установки необходимой величины нагрузки на грузовую лебедку, при которой происходит срабатывание датчика 5, путевой выключатель снабжается регулировочными винтами.
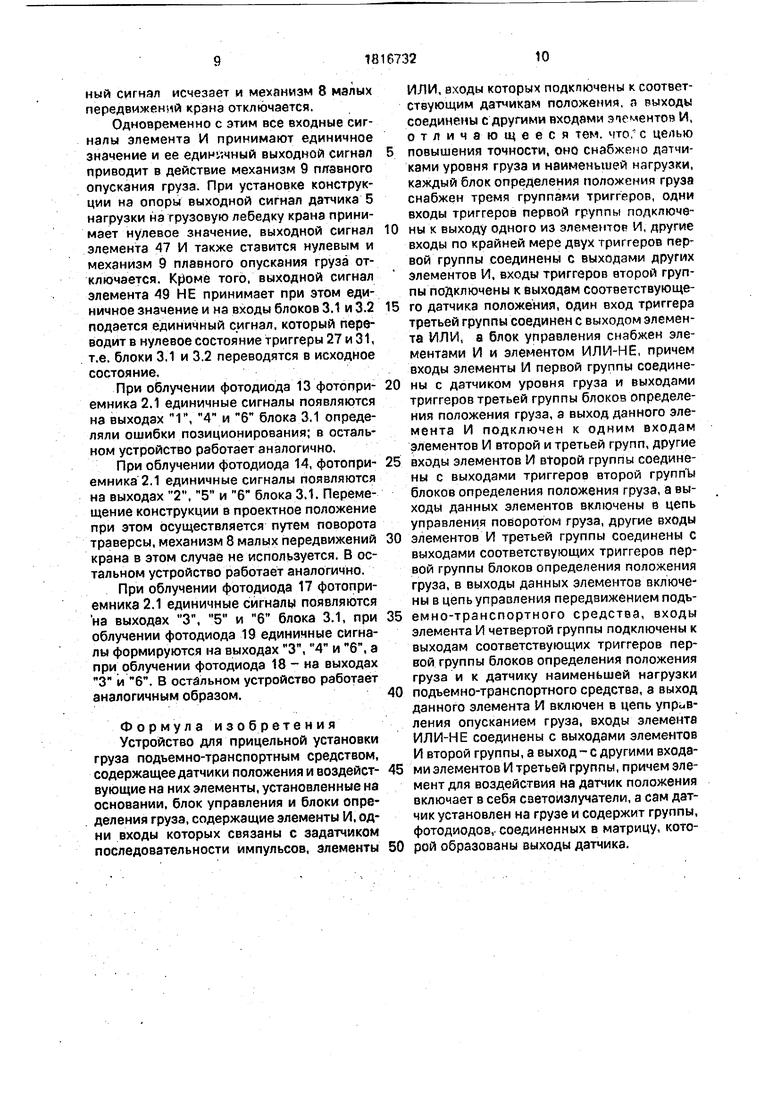
Блок 6 управления выполнен на логических схемах (фиг.7). Элементы 42 - 47 являются логическими элементами И, элемент 48 - логическим элементом ИЛИ-НЕ, элемент 49 - элементом НЕ, К входам элемента 42 И подключены выходы датчика 4. и выходы 6 блоков 3.1, 3.2, а его выход связан с одним из входов элементов 43 - 46 И. К другим входам элемента 43 И подсоединены выход блока 3.1 и выход блока 3.2, а к другим выходам элемента 44 И подключен выход блока 3.1 и выход блока 3.2, причем выходы элементов 43 и 44 связаны с входами блока 7 механизма поворота траверсы, а также заведены на входы элемента 48 ИЛИ- НЕ. выход которого подключен к другому входу элементов 45 и 46 И. К другим входам элементов 45 И подсоединены выходы блоков 3.1 и 3.2, а к другим входам элемента 46 И подключены выходы 3 блоков 3.1 и 3.2, причем выходы элементов 45 и 46 И связаны с входами блока 8 малых передвижений кра- 5 на. На входы элемента 47 И заведены выходы 2 блоков 3.1 и 3.2 и выход датчика 5 нагрузки на грузовую лебедку, а выход элемента 47 связан с входом механизма 9 плавного опускания груза; кроме того, выход
0 датчика 5 поступает к входу элемента 49 Н Е, выход которого является выходом блока б управления и подключен к входам 1 бло- ков 3.1, 3.2.
В качестве блока 7 механизма поворота
5 траверсы может быть использован имеющийся на кране поворотный механизм,
В качестве механизма 8 малых передвижений крана используется домкрат с электрическим управлением, установленный
0 между неподвижной массивной конструкцией и краном таким образом, что усилие, развиваемое домкратом, вызывает перемещение крана в продольном направлении. Данный механизм позволяет осуществлять
5 точное регулирование положения консольного крана в продольном направлении.
Механизм 9 плавного опускания груза представляет собой г.омкрат с электрическим управлением, причем его подвижная
0 часть жестко соединена с грузовой лебедкой крана, установленной на направляющих, обеспечивающих перемещение грузовой лебедки вдоль платформы крана. Использование данного механизма позво5 ляет практически полностью исключить раскачивание конструкции при ле опускании, так как домкрат дает возможность плавно смещать грузовую лебедку в направлении подвешенного груза, что вызывает равно0 мерное ослабление натяжения грузового каната и плавное опускание конструкции.
Введение в устройство механизма плавного опускания груза объясняется тем, что грузовая лебедка крана не позволяет произ5 водить равномерное опускание конструкции. Грузовая лебедка содержит приводной электродвигатель, редуктор, барабан для грузового каната и тормозное устройство. Редуктор служит для передачи
0 вращения от приводного электродвигателя на барабан, наматывающий или разматывающий канат, что вызывает соответственно подъем или опускание груза. Тормозное ус- . тройство служит дня фиксации груза на весу
5 путем блокирования вращения барабана. При опускании конструкции с помощью грузовой лебедки из-за переходных процессов в электроприводе и механической системе барабан-грузовой канат конструкция начинает двигаться вниз рывками, что вызывает
ее раскачивание. Учитывая большую массу конструкции, для затухания колебаний требуется длительный промежуток времени, что затрудняет прицельную установку конструкции.
Устройство работает следующим образом. Конструкция 10 (фиг.2) с установленными на ней фотоприемниками 2.1 2.2 и датчиком 4 уровня доставляется с помощью крана к месту монтажа под управлением машиниста. На месте установки с большой точностью размещаются излучатели 1.1,1.2 таким образом, чтобы при совпадении осей направленности световых потоков излучателей 1.1, 1.2 с центрами соответствующих фотоприемников 2.1,2.2 конструкция 10 заняла бы требуемое положение. Подведя кран с конструкцией 10 к месту установки (с максимально возможной точностью), машинист приводит в рабочее положение ме-, ханизм 8 малых передвижений крана. После этого по сигналу датчика 4 уровня добиваются горизонтального положения конструк- ции 10. Далее процесс установки производится в автоматическом режиме.
Оптический сигнал излучателя 1.1 попадает на один из фотодиодов 13...21 фотоприемника 2.1, а сигнал излучателя 1.2 попадает на один из фотодиодов фотрпри- емника 2.2 Блоки 3.1 и 3.2 обрабатывают принятые сигналы.
Блок 3.1 работает следующим образом (блок 3.2 работает аналогично) (см.фиг.4).
В исходном состоянии все триггеры 26 - 31 блока 3.1 находятся в нулевом состоянии. На выходах распределителя импульсов 32 последовательно через равные промежутки времени формируются единичные импульсы.
При попадании оптического сигнала излучателя 1.1 на один из фотодиодов 13...21 фотоприемника 2.1 сопротивление данного фотодиода резко падает. Это вызывает соединение входа фотоприемника 2.1, с которым связан анод данного фотодиода, с выходом, соединенным с катодом рассматриваемого фотодиода.
При облучении фотодиода 11 фотоприемника 2.1 на его выход а с выхода распределителя импульсов 32 поступает единичный импульс. Этот сигнал поступает на вход S триггера 29 и переводит его в единичное состояние, т.е. на выходе 4 блока 3.1 появляется единичный сигнал. Кроме того, единичный импульс через элемент 23 ИЛИ подается на вход S триггера 31 и также переводит его в единичное состояние. Появление единичного сигнала на выходе 6 блока 3.1 означает, что сигнал излучателя 1.1 попал на фотоприемник 2.1, Одновременно с этим на обоих входах элемента 22 И появляются единичные сигналы и его выходной сигнал переводит триггер 26 в единичное состояние, т.е. на выходе 1 блока 3.1 появляется единичный сигнал.
В случае, если на выходе датчика 4 и на выходе 6 блока 3,2 присутствуют единичные сигналы, на выходе элемента 42 И блока 6 управления единичный сигнал, который
подается на входы элементов 43 - 46 И и переводит блок 6 управления на работу в автоматическом режиме.
При появлении на выходе блока 3.2 единичного сигнала на всех входах элемента 43
И присутствуют единичные сигналы, его выходной сигнал принимает единичное значение и воздействует на блок 7 механизма поворота траверсы, вызывая поворот конструкции в направлении, противоположном
ее боковому смещению относительно прокатного положения. Кроме того, выходной единичный сигнал элемента 43 И поступает на вход элемента 48 ИЛИ-НЕ, а на выходе появляется нулевой сигнал, который ставит
запрет на элементы 45,46 И,
После ликвидации бокового смещения конструкции световой поток излучателя 1.1 попадает на фотодиод 12 фотоприемника 2.1, при этом на его выходе d появляется
единичный импульс, который переводит в нулевое Состояние триггер 29, и на выходе 4 блока 3.1 исчезает единичный сигнал. При этом на выходе элемента 43 И 6 управления единичный сигнал также исчезает и
поворот траверсы прекращается. Выходной сигнал элемента 48 ИЛИ-НЕ изменяется на единичный и снимается запрет элементов 45,46 И. В случае, если на выходах Г обоих блоков 3.1 и 3.2 присутствуют единичные
сигналы, все входные сигналы элемента 45 И имеют единичный уровень, и его выходной единичный сигнал приводит в действие механизм 8 малых передвижений крана, который вызывает продольное перемещение
крана в направлении, противоположном смещению конструкции.
После ликвидации продольного смещения конструкции световые потоки излучате- лей 1.1 и 1.2 попадают на фотодиоды 15,
расположенные в центрах фотоприемников 2.1 и 2.2. При этом единичный импульс с выхода распределителя 32 через фотодиод 15, элемент 25 ИЛИ и элемент 23 И переводит триггер 26 в нулевое состояние, а триггер 27 - в единичное. На выходах блоков 3.1, 3.2 единичный сигнал заменяется нулевым, а на выходах данных блоков появляются единичные сигналы. При этом на выходе элемента 45 И блока 6 управления единичный сигнал исчезает и механизм 8 малых передвижений крана отключается.
Одновременно с этим все входные сигналы элемента И принимают единичное значение и ее единичный выходной сигнал приводит в действие механизм 9 плавного опускания груза. При установке конструкции на опоры выходной сигнал датчика 5 нагрузки на грузовую лебедку крана принимает нулевое значение, выходной сигнал элемента 47 И также ставится нулевым и механизм 9 плавного опускания груза отключается. Кроме того, выходной сигнал элемента 49 НЕ принимает при этом единичное значение и на входы блоков 3.1 и 3.2 подается единичный сигнал, который переводит в нулевое состояние триггеры 27 и 31, т.е. блоки 3,1 и 3.2 переводятся в исходное состояние.
При облучении фотодиода 13 фотопри- емника 2.1 единичные сигналы появляются на выходах 1, 4й и 6 блока 3.1 определяли ошибки позиционирования; в остальном устройство работает аналогично.
При облучении фотодиода 1.4, фотопри- емника 2.1 единичные сигналы появляются на выходах 2, 5 и 6 блока 3.1. Перемещение конструкции в проектное положение при этом осуществляется путем поворота траверсы, механизм 8 малых передвижений крана в этом случае не используется. В остальном устройство работает аналогично.
При облучении фотодиода 17 фотоприемника 2.1 единичные сигналы появляются на выходах 3, 5 и 6 блока 3.1, при облучении фотодиода 19 единичные сигналы формируются на выходах 3, 4 и 6, а при облучении фотодиода 18 - на выходах 3 и 6. В остальном устройство работает аналогичным образом.
Формул а изобретения Устройство для прицельной установки груза подъемно-транспортным средством, содержащее датчики положения и воздейст- вующие на них элементы, установленные на основании, блок управления и блоки определения груза, содержащие элементы И, одни входы которых связаны с за датчиком последовательности импульсов, элементы
ИЛИ, входы которых подключены к соответствующим датчикам положения, а выходы соединены с другими входами эчементов И, отличающееся тем. что. с целью повышения точности, оно снабжено датчиками уровня груза и наименьшей нагрузки, каждый блок определения положения груза снабжен тремя группами триггеров, одни входы триггеров первой группы подключены к выходу одного из элементов И, другие входы по крайней мере двух триггеров первой группы соединены с выходами других элементов И, входы триггеров второй группы подключены к выходам соответствующего датчика положения, один вход триггера третьей группы соединен с выходом элемента ИЛИ, а блок управления снабжен элементами И и элементом ИЛИ-НЕ, причем входы элементы И первой группы соединены с датчиком уровня груза и выходами триггеров третьей группы блоков определения положения груза, а выход данного элемента И подключен к одним входам элементов И второй и третьей групп, другие входы элементов И второй группы соединены с выходами триггеров второй группы блоков определения положения груза, а выходы данных элементов включены и цепь управления поворотом груза, другие входы элементов И третьей группы соединены с выходами соответствующих триггеров первой группы блоков определения положения груза, в выходы данных элементов включены в цепь управления передвижением подъ- емно-транспортного средства, входы элемента И четвертой группы подключены к выходам соответствующих триггеров первой группы блоков определения положения груза и к датчику наименьшей нагрузки подъемно-транспортного средства, а выход данного элемента И включен в цепь управления опусканием груза, входы элемента ИЛИ-НЕ соединены с выходами элементов И второй группы, а выход-с другими входами элементов И третьей группы, причем элемент для воздействия на датчик положения включает в себя саетоизлучатели, а сам датчик установлен на грузе и содержит группы, фотодиодов,, соединенных в матрицу, которой образованы выходы датчика.
i
фиг. 4
л
У
&
J7
Г
М
ъ
Фи Г. 6
| Устройство управления группой кранов | 1977 |
|
SU698901A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| - | |||
