Изобретение относится к области тех- нолргии судостроения и может быть исполь- для разметки на вертикальных и нак/юнных плоских стенках (бортах, переборках,;выгородках, стенках рубок) и других конструкциях судна, как в замкнутых его помещениях, так и в районе открытых палуб - на сменках надстроек, рубок, тамбуров и т.п. Кроме то/о, изобретение может иепользо- в гражданском и промышленном строительстве, декоративно-прикладном и монументальном искусстве при разметке положения различных элементов конструкции сооружения, а также при нанесении узловых точек крупногабаритных художественных панно, настенной живописи, мозаики и других ра- боТг для выполнения которых на плоскость стенки необходимо нанести некоторую систему точек с заданными координатами в прямоугольной системе координат.
Плоская вертикальная стенка судового помещения является таковой лишь номинально. В действительности полотно (обшивка) такой реальной стенки (например, поперечной междупалубной переборки) может иметь ряд отступлений от теоретических параметров его формы и пространственного положения в пределах действующей в судостроении системы допусков.
Так, отклонения фактической формы полотна переборки от плоскости могут быть обусловлены совокупностью следующих деформаций: продольного и поперечного изгиба секции и местных деформаций полотна (бухтин, домиков). Кроме того, секция переборки может быть установлена на судне с отклонением (в пределах допуска) от вертикальности. Особый случай отклонения секции переборки от вертикальности наблюдается при постройке судна на наклонXI ю
СП N5 00 Ю
ном стапеле. При этом угол наклона стапеля может алгебраически суммироваться с упомянутым отклонением переборки по вертикали относительно теоретической вертикальной поперечной плоскости судна (плоскости шпангоута).
Приведенные выше факторы создают серьезные трудности для выполнения на таких поверхностях проекционной разметки из единого центра., проекции (т.е.. косого проецирования), т.к., в результате отклонения формы полотна от плоскости, неизбежны существенные линейные погрешности координат размечаемой точки в плоскости объекта, а наличие отклонений стенки от вертикали затрудняет ориентирование проектора относительно объекта.
Известен способ определения планового положения точек объекта и устройство для его осуществления (см. а.с. N° 979852, кл. G 01 С 11/00 от 07.12.82). Способ этот заключается в нанесении на объекте двух опорных точек, ориентировании по ним проектора и перевычисление прямоугольных координат опорных точек на поверхности объекта в систему прямоугольных же координат проектора. Для разметки объекта используется специальный проекционный аппарат, имеющий сложную систему ориентирования, при которой предметный стол (рамку) аппарата устанавливают строго параллельно плоской поверхности объекта. При этом собственно проецирование системы точек на поверхность объекта осуществляют посредством линейных перемещений кареток с объективом относительно оси прибора и точечного источника света при вращении оператором соответствующих штурвалов.
К недостаткам данного способа можно отнести:
- необходимость создания, специального сложного проекционного аппарата;
- громоздкость аппарата и непригодность для работы в условиях судостроительного производства;
- непригодность аппарата для разметки стенок судовых помещений, особенно при постройке судна на наклонном стапеле;
- значительные пргрешности координат размечаемых точек из-за невозможности учета фактических отклонений формы полотна стенки от его теоретической плоскости;
- значительные затраты трудоемкости
и времени вследствие ручной настройки на проекционном аппарате координат
каждой проецируемой точки;
- необходимость точного ориентирования аппарата относительно размечаемого объекта.. ;
Известен также способ фртопроекцирнной разметки мест установки деталей приварного насыщения корпуса на плоскостях судовых помещений. Способ этот заключается в проецировании на размечаемую плоскую поверхность негативов или диапрзитивов, полученных при фотографировании аналогичного, ранее выполненной объекта, илу масштабного чертежа поверхности с деталями насыщения. Фотографирование судовых плоскостей и проецирование
5. не.гативов производится при помощи переносимой компактной фотопроекцжж- ной установки ФТП-451, состоящей из фотокамеры, осветителя и штатива;. В фотокамере размещен аппарат, совмещающий в
0 себе фотографическую и проекционную си- : стемы. Ч . ..-. /Ч. Ч - : ...,
Недостатками описанного фотопроек- ционногр способа являются:
- необходимость вычерчивания точной 5 масштабной схемы размечаемой стенки с изделиями насыщения, при этом неизбежны значительные погрешности за счет изготовления схемы, возрастающие с кратностью принятого масштаба, а сам процесс изго- .0 товления масштабных чертежей отличается большой трудоемкостью;
- фотографирование .натурного объекта на ранее строящемся судне, как правило, либо затруднено, либр вообще невозможно,
5 тем более, что во многих случаях исходная документация (в данном примере - негатив) для разметки должна быть изготовлена на стадии технологической подготовки производства, т.е. до начала постройки судов;
0 - проецирование аппаратом изображения .с негатива на .судовую поверхность, в стесненных условиях судового помещения, когда аппарат, невозможно установить достаточно далеко от объекта, сопряжено с
5 существенными искажениями, вызванными дисторсией объектива при ширркоугольном проецировании;
- серьезным недостатком фотопроекционного способа является необходимость за- 0 темнения судового помещения на время разметки, что противоречит требованиям безопасности при постройке судов. .
Целью настоящего изобретения является повышение точности и упрощение реали- 5 зации за счет обеспечения возможности произвольной установки проектора относительно опорных точек.
Поставленная цель достигается тем, что в способе разметки деталей приварного насыщения на поверхности в помещении судна, включающем установку проектора, ориентирование его по опорным точкам, предварительно нанесенным на поверхности и определенным в прямоугольной системе ко- условной плоскости разметки, и проецирование разметочных точек на поверхность, в качестве проектора используют теодолит с дальномерной насадкой, который ориентируют по трем опорным точ- кай с измерением их пространственных ко- в системе координат теодолита с началом в точке пересечения его вертикальной оси и визирной оси зрительной трубы,
. проецированием разметочных точек пер|евычисляют их положение из прямоугольной системы координат условной пло- разметки в пространственную систему координат теодолита, а проецирование разметочных точек осуществляют последовательно, путем задания теодолитом пространственного углового направления для каждой из. разметочных точек.
Сопоставительный анализ с выбранным в качестве прототипа способом фото- про(кционной разметки мест установки деталей приваренного насыщения корпуса нэ плоскостях судовых помещений позволяет сделать вывод, что заявляемый способ разметки деталей приварного на- сыщгния на поверхности в помещении судна, включающий установку проектора, хэриеЧтйрованйе его по опорным точкам, предварительно нанесенным на поверхности и определенным в прямоугольной системе координат условной плоскости разм этки. и проецирование разметочных точек на поверхность, отличается тем, что в качестве проектора используют теодолит с дэльномерной насадкой, который ориентируют по трем опорным точкам с измерением их пространственных координат в системе координат теодолита с началом в точке пересечения его вертикальной оси и визирной
. оси зрительной трубы, перед проецированием разметочных точек перевычисляют их положение из прямоугольной системы ко- ордин|ата условной плоскости разметки в пространственную систему координат теодолит, а проецирование разметочных точек осуще:твляют путем задания теодолитом .пространственного углового направления для каждой из разметочных точек.
Та. им образом, заявляемое техническое решение соответствует критерию новизна,. Анализ известных технических решений (аналогов) в исследуемой области, т.е. в технологий судостроения, позволяет сделат| вывод об отсутствии в них признаков, сходных с существенными отличительными признаками в заявляемом способе
разметки деталей приварного насыщения на поверхности в помещении судна, и признать заявляемое решение соответствующим критерию существенные отличия, 5В результате внедрения настоящего изобретения, по сравнению с базовым вариантом - известным способом фотопроекционной разметки мест установки деталей приварного насыщения корпуса на плоско0 стях судовых помещений (книга П.Х.Гре- бельского и М..Х.Резника Судовые корпусно-достроечные работы, Л., Судостроение, 1979, стр.96, рис.61), будут получены следующие преимущества:
5 - сокращение трудоемкости и повышение точности выполнения разметочных работ на строящемся судне;. .
- улучшение условий и безопасности работы на строящемся судне;
0 . - сокращение стапельного периода постройки судна.
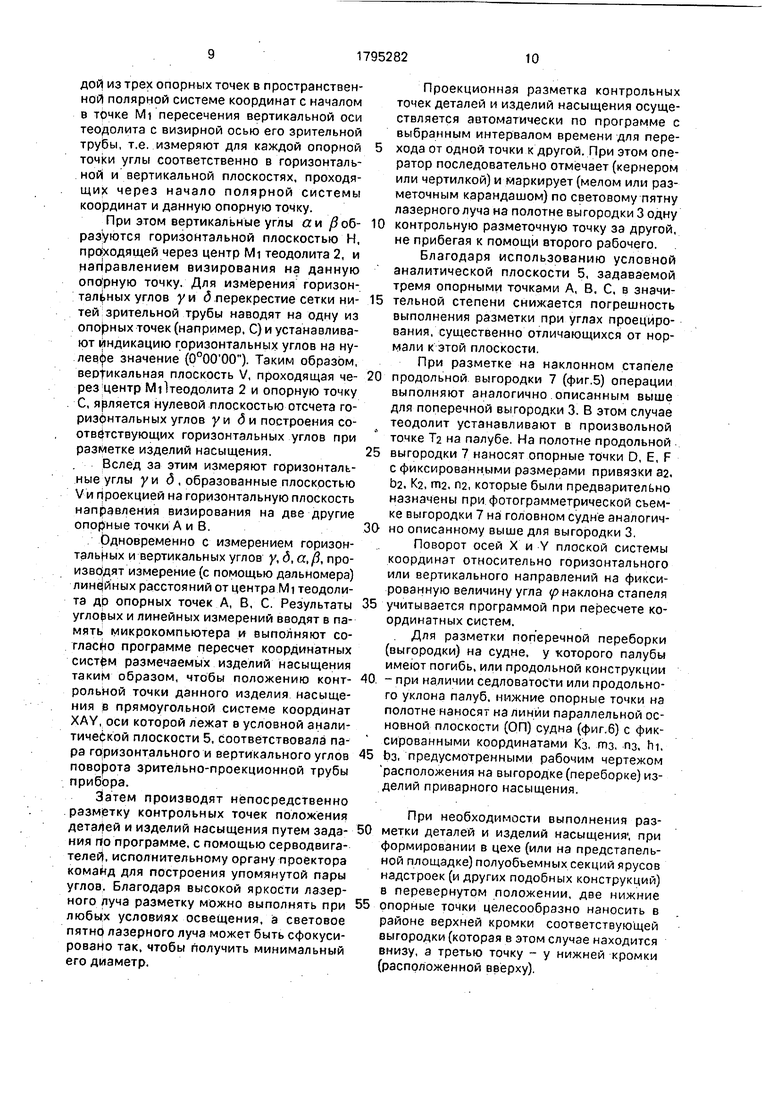
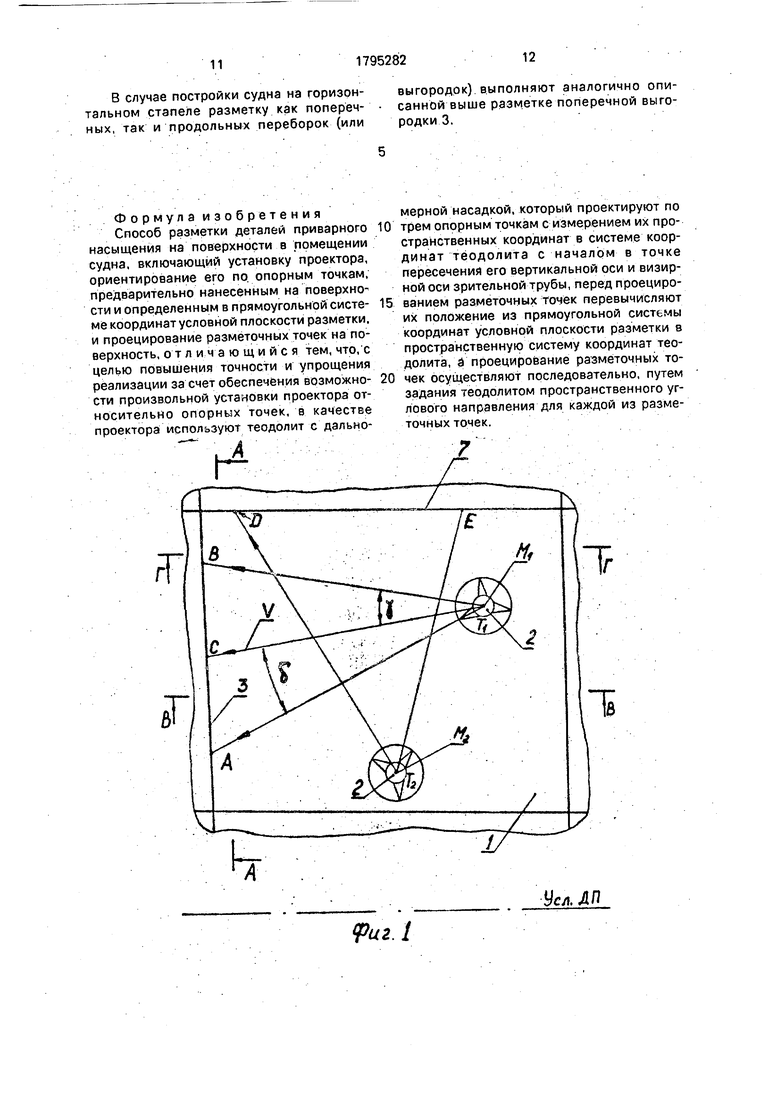
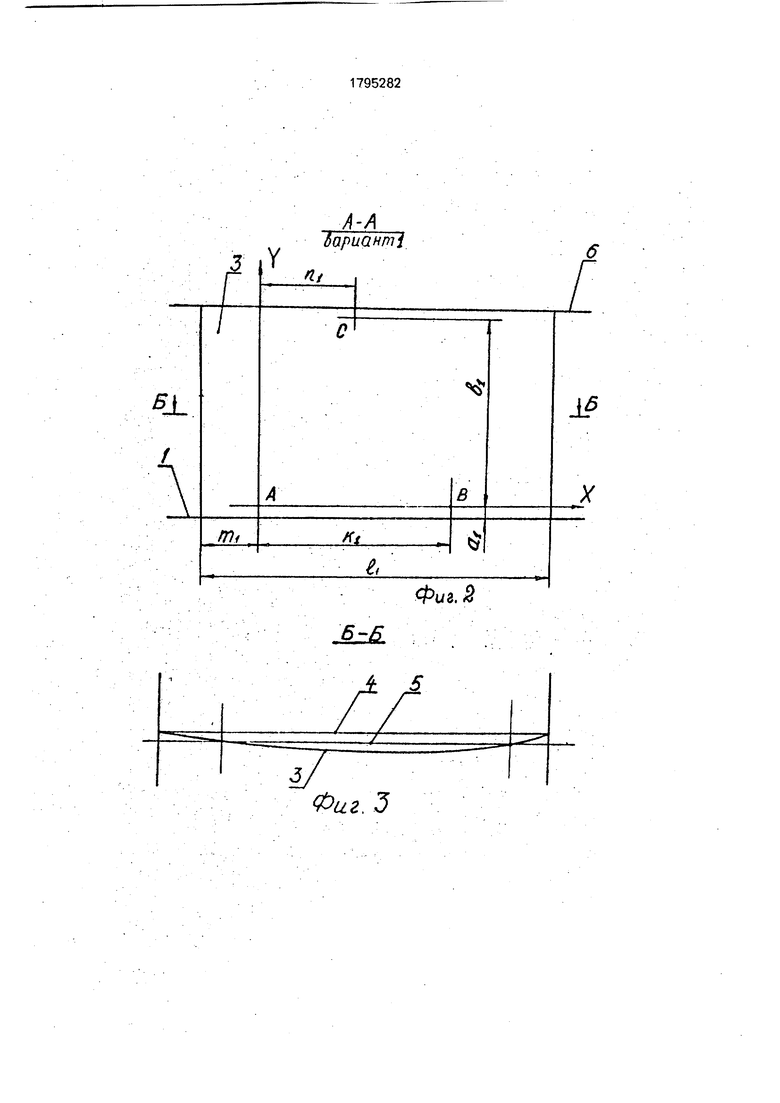
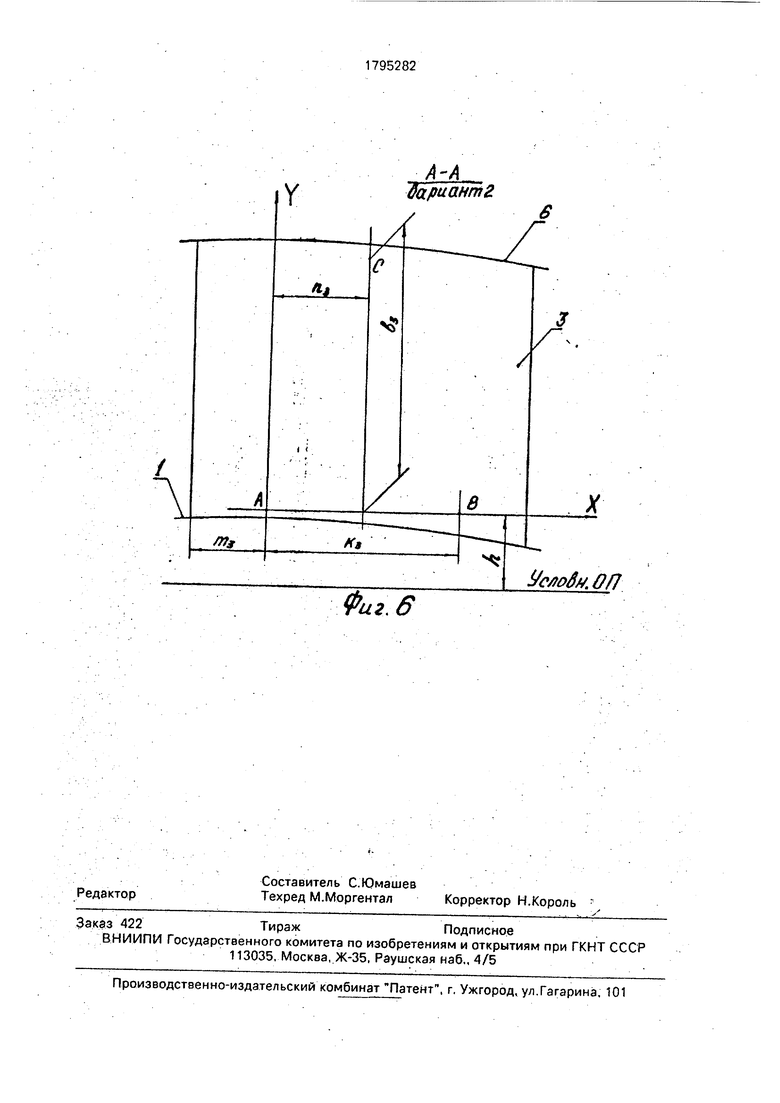
На фиг. 1 показано в плане помещение судна при постройке его на наклонном стапеле; на фиг.2 - сечение А-А на фиг.1, вари5 ант 1 (судно с горизонтальными плоскими палубами); на фиг.З - сечение фиг.2; на фиг.4 - сечение В-В на фиг.1 (палубы плоские и горизонтальные); на фиг.5 - сече-, ние Г-Гна фиг.1 (палубы плоские и горизон0- тальные); на фиг.б - сечение А-А на фиг.1, вариант 2 (палубы с погибью).
Разметка приварного насыщения корпуса в судовом помещении состоит из двух основных этапов:
5 1. Определение координат разметочных (контрольных) точек деталей или изделий насыщения на некоторой выгородке на головном судне в соответствии с известной технологией промышленной фотограммет0: рии.
2, Собственно разметка насыщения на этой же выгородке на втором и последующих судах серии однотипных судов с помощью специального проекционного
5 устройства, в котором электронный теодолит сблокирован с дальномерной насадкой, микрокомпьютером и лазерной проекционной системой.
Определение координат деталей насыще0 ния на головном судне на основе стандартной методики промышленной фотограмметрии, на примере поперечной выгородки судна е плоскими горизонтальными палубами, производят следующим образом.
5 По окончании разметки, установки и приварки на выгородке (например, поперечной выгородке 3, фиг.1, 2) всех деталей и изделий приварного насыщения корпуса, включая крепление кабельных трасс, трубопроводов и др., на поверхности полотна
выгородки 3 наносят три опорные точки А, В и С, которые служат для задания условной аналитической плоскости 5.
Идеальная условная аналитическая плоскость 5 представляет собой некоторое среднее положение поверхности полотна выгородки 3, которая в реальных условиях, может иметь как деформации (изгиб), так и отклонение от вертикальной плоскости. Благодаря назначению аналитической плоскости 5 обеспечивается предельное уменьшение погрешностей положения изделий насыщения, (при разметке на последующих судах), относительно заданных осей координат, вследствие отклонений реальной формы полотна выгородки 3 от ее теоретической плоскости 4. В общем случае аналитическая плоскость 5 может быть непараллельна (в незначительной мере) теоретической плоскости 4.. : .
Две нижние опорные точки А, В располагают в непосредственной близости от настила палубы 1, на некотором фиксированном расстоянии ai, например, а-| 50 или ai 100 мм. При этом расстояние К1 между точками А и В принимают равным половине (или несколько большим половины) длины И, размечаемой поперечной выгородки З.т.е.
Ki (Q.5-0,6)H,
а одна из нижних точек (в данном примере - точка А) расположена на некотором фиксированном расстоянии тГ от вертикальной кромки выгородки 3, где
mi (0,25-0,20)
и может быть принято равным, например, 1000, 1500 мм и т.д.
Третью - верхнюю точку С наносят на середине расстояния между точками А и В
Кг
по горизонтали, т.е. ги -яг , непосредственно под вышележащей палубой 6 помещения; на некотором фиксированном расстоянии bi, которое выбирается таким образом, чтобы точка С отстояла от палубы 6 на расстоянии 50-100 мм.
Для каждой данной выгородки или переборки выбранные размеры ai, bi, Ki, mi, n1 являются фиксированными и неизменными и служат Для воспроизведения системы координат при последующей разметке насыщения на серийных судах.
Двумя нижними опорными точками А и
В задается положение оси абсцисс X плр- ской прямоугольной системы координат с
началом в точке А (положение оси ординат
V вычисляется аналитически по программе в процессе пересчете координатных систем).
После нанесения опорных точек А, В, С
на настиле палубы 1 помещения устанавливают в произвольной точке (на чертежах не показано) фотограмметрическую стереокаме- ру и производят съемку выгородки 3 с установленным на ней насыщением, Затем, в
0 соответствии со стандартной методикой работ промышленной фотограмметрии производят химическую обработку полученных фотоматериалов, аналитическую обработку снимков на стереокомпараторе и выполне5 ние расчетов на ЭВМ координат разметочных контрольных точек изделий насыщения на данной выгородке и переборке с записью результатов вычислений на соответствующем носителе информации.:
0 Собственно разметку деталей приварного насыщения на поверхности в помещении судна, на примере поперечной выгородки судна с плоскими горизонтальными палубами, строящегося на наклонном стапеле, осу5 ществляют следующим образом.
На настиле палубы 1 (пола помещения) в некоторой произвольной точке Тч устанавливают и горизонтируют специальный прибор 2, совмещающий в себе лазерный
0 электронный теодолит - проектор с дально- мерной насадкой и микрокомпьютером- Такой прибор может быть выполнен, например, на базе серийно выпускаемого электронного теодолита с дальномером мо5 дели Dj-0 R 3002 швейцарской фирмы Wild, осуществляющего измерение расстояний до объекта без применения отражателей. Для выполнения операций автоматической разметки согласно изобретению прибор
0 DJOR 3002 (или ему подобный) достаточно оснастить лазерным источником света с соосностью лазерного луча с визирной осью зрительной трубы теодолита и серводвигателями для настройки углов проецирования
5 по программе.
При установке теодолита-проектора 2 в точке Т1 нет необходимости выполнять точную выверку его коллимационной плоскости. параллельно (или перпендикулярно) теоре0 тическрй линии (плоскости) 4 полотна поперечной выгородки 3.
На размечаемой поверхности полотна выгородки 3 наносят три опорные точки А, В,Ј с координатными размерами ai, bi, Ki,
5 mi, ni, которые точноравны значениям этих величин, принятым при описанной выше фотограмметрической съемке насыщения для данной выгородки.
С помощью электронного теодолита с дальномером 2 измеряют координаты каждои; из трех опорных точек в пространственной полярной системе координат с началом в точке Mi пересечения вертикальной оси теодолита с визирной осью его зрительной трубы, т.е. измеряют для каждой опорной точки углы соответственно в горизонтальной и вертикальной плоскостях, проходящих через начало полярной системы координат и данную опорную точку.
При этом вертикальные углы ft образуются горизонтальной плоскостью Н, приходящей через центр Mi теодолита 2, и наНравлением визирования на данную опорную точку. Для измерения горизон- углов у и д перекрестие сетки нитей зрительной трубы наводят на одну из опорных точек (например, С) и устанавливают индикацию горизонтальных углов на ну- левфе значение (0°00 00). Таким образом, вер|икальная плоскость V, проходящая через центр М теодолита 2 и опорную точку С, является нулевой плоскостью отсчета горизонтальных углов у и б и построения соответствующих горизонтальных углов при разметке изделий насыщения.
Вслед за этим измеряют горизонтальные углы д , образованные плоскостью V и проекцией на горизонтальную плоскость направления визирования на две другие опорные точки А и В.
. Одновременно с измерением горизонтальных и вертикальных углов у, д, a,fl, производят измерение (с помощью дальномера) линфных расстояний от центра MI теодолита др опорных точек А, В, С. Результаты углорых и линейных измерений вводят в память микрокомпьютера и выполняют согласно программе пересчет координатных систем размечаемых изделий насыщения таким образом, чтобы положению контрольной точки данного изделия насыщения в прямоугольной системе координат XAY, оси которой лежат в условной аналитической плоскости 5, соответствовала пара горизонтального и вертикального углов поворота зрительно-проекционной трубы прибора.
Затем производят непосредственно разметку контрольных точек положения деталей и изделий насыщения путем задания по программе, с помощью серводвигателей, исполнительному органу проектора команд для построения упомянутой пары углов. Благодаря высокой яркости лазерного луча разметку можно выполнять при любых условиях освещения, а световое пятно лазерного луча может быть сфокусировано так, чтобы получить минимальный его диаметр.
Проекционная разметка контрольных точек деталей и изделий насыщения осуществляется автоматически по программе с выбранным интервалом времени для пере5 хода от одной точки к другой. При этом оператор последовательно отмечает (кернером или чертилкой) и маркирует (мелом или разметочным карандашом) по световому пятну лазерного луча на полотне выгородки 3 одну
0 контрольную разметочную точку за другой, не прибегая к помощи второго рабочего.
Благодаря использованию условной аналитической плоскости 5, задаваемой тремя опорными точками А, В. С, в значи5 тельной степени снижается погрешность выполнения разметки при углах проецирования, существенно отличающихся от нормали к этой плоскости.
При разметке на наклонном стапеле
0 продольной выгородки 7 (фиг.5) операции выполняют аналогично .описанным выше для поперечной выгородки 3. В этом случае теодолит устанавливают в произвольной точке Та на палубе. На полотне продольной
5 выгородки 7 наносят опорные точки D, E, F с фиксированными размерами привязки 32, 02, К2, ГП2, П2, которые были предварительно назначены при фотограмметрической съемке выгородки 7 на головном судне аналогич0- но описанному выше для выгородки 3.
Поворот осей X и Y плоской системы координат относительно горизонтального или вертикального направлений на фиксированную величину угла наклона стапеля
5 учитывается программой при пересчете координатных систем.
. Для разметки поперечной переборки (выгородки) на судне, у которого палубы имеют погибь, или продольной конструкции
0. - при наличии седловатости или продольного уклона палуб, нижние опорные точки на полотне наносят ка линии параллельной основной плоскости (ОП) судна (фиг.6) с фиксированными координатами Кз, тз. пз, hi,
5 Ьз, предусмотренными рабочим чертежом расположения на выгородке (переборке) изделий приварного насыщения.
При необходимости выполнения раз- 0 метки деталей и изделий насыщения1, при формировании в цехе (или на предстапель- ной площадке) полуобъемных секций ярусов надстроек (и других подобных конструкций) в перевернутом положении, две нижние 5 опорные точки целесообразно наносить в районе верхней кромки соответствующей выгородки (которая в этом случае находится внизу, а третью точку - у нижней кромки (расположенной вверху).
В случае постройки судна на горизонтальном стапеле разметку как поперечных, так и продольных переборок (или
выгородок) выполняют аналогично описанной выше разметке поперечной выгородки 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разметки теоретических линий набора и контурных линий секций корпуса судна | 1983 |
|
SU1123929A1 |
| Оптический способ проверки положенияКОРпуСНыХ КОНСТРуКций и ОбВОдОВ СудНАНА СТАпЕлЕ | 1979 |
|
SU844460A1 |
| СПОСОБ ПРОВЕРКИ И РАЗМЕТКИ ТЕОДОЛИТОМ КОНСТРУКЦИЙ КОРПУСА СУДНА | 1969 |
|
SU431056A1 |
| СПОСОБ НИВЕЛИРОВАНИЯ, РАЗМЕТКИ И ПРОВЕРКИ КОРПУСА СУДНА | 1992 |
|
RU2094294C1 |
| Способ проверки и разметки теодолитом элементов корпуса судна на плаву | 1976 |
|
SU787254A1 |
| Способ проверки лекальной кромки постели для сборки корпуса судна | 1971 |
|
SU470431A1 |
| Узел для разметки линий к устройствам для оптической разметки | 1984 |
|
SU1235722A1 |
| Автоматизированная система контроля сборки судовых конструкций на построечном месте | 1987 |
|
SU1498664A1 |
| СПОСОБ ОПТИЧЕСКОЙ РАЗМЕТКИ КОНСТРУКЦИЙ | 1971 |
|
SU431064A1 |
| Способ проверки положения по высоте элементов конструкции и обводов корпуса судна | 1980 |
|
SU965875A1 |
Область использования: технология судостроения, при разметочных работах на вертикальных и наклонных плоских стенках. Сущность изобретения: произвольно относительно размечаемой поверхности устанавливают теодолит с. дальномерной насадкой и ориентируют его по трем опорным точкам с измерением их пространственных координат в системе координат теодолита с началом в точке пересечения его вертикальной оси и визирной оси зрительной трубы. Перед проецированием разметочных точек перевычисляют их положение из прямоугольной системы координат условной плоскости разметки в пространственную систему координат теодолита, а проецирование разметочных точек осуществляют путем задания теодолитом пространственного углового направления для каждой из разметочных точек.6 ил. со с
Формула изобретения Способ разметки деталей приварного насыщения на поверхности в помещении судна, включающий установку проектора, ориентирование его по. опорным точкам, предварительно нанесенным на поверхности и определенным в прямоугольной систе- ме координат условной плоскости разметки, и проецирование размёточных точек на поверхность, от л и ч а ю щи и с я тем, что, с целью повышения точности и упрощения реализации за счет обеспечения возможно- сти произвольной установки проектора относительно опорных точек, в качестве проектора используют теодолит с дальнемерной насадкой, который проектируют по трем опорным точкам с измерением их пространственных координат в системе координат теодолита с началом в точке пересечений его вертикальной оси и визирной оси зрительной трубы, перед проецированием разметочных точек перевычисляют их положение из прямоугольной системы координат условной плоскости разметки в пространственную систему координат теодолита, э проецирование размёточных точек осуществляют последовательно, путем задания теодолитом пространственного углового направления для каждой из разметочных точек.
&л ЛП
Риг.1
Б-Б
Фиг.З
Фиг. 2
| J Гребельский П.Х. | |||
| Резник М.Х | |||
| Судовые KOpjnycHo-достроечные работы | |||
| Ленинград, Судостроение, 1979, с.96 |
