Изобретение относится к области приборостроения, а именно к автоматическим плотномерам жидкости, предназначенным для непрерывного измерения плотности контролируемой жидкости и преобразования результатов измерения в стандартный выходной сигнал. Предлагаемый плотномер может найти применение в химической, нефтехимической, пищевой и других отраслях промышленности для контроля плотности жидких технологических сред.
Целью изобретения является расширение области применения и повышение точности определения.
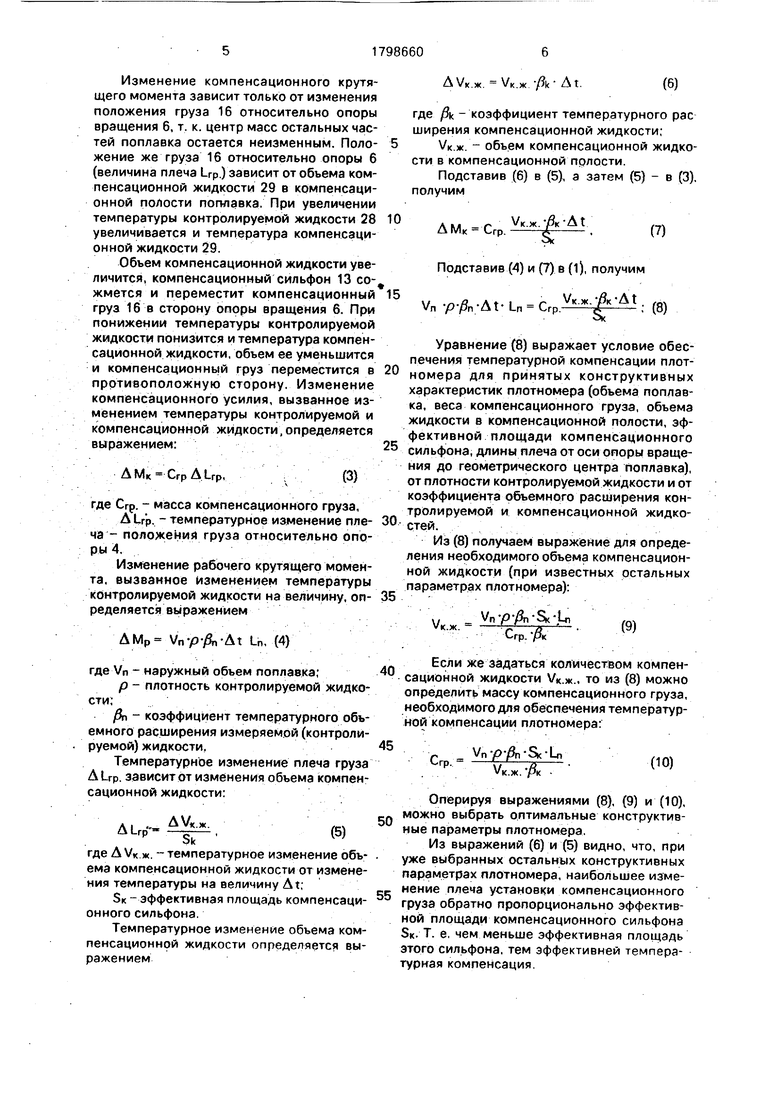
На фиг, 1 представлена схема конструкции плотномера; на фиг. 2 - узел крепления компенсационного груза; на фиг. 3.- график
симметричности температурной компенсации.
Плотномер содержит два основных блока: измерительную кинематическую систему 1 и блок формирования выходного сигнала 2. Измерительная кинематическая система 1 содержит проточную камеру 3, в которой размещен поплавок (жесткий, цилиндрической формы) 4, соединенный полым штоком 5, имеющим опору вращения 6, с блоком формирования выходного сигнала 2. Вывод штока 5 из проточной камеры 3 герметизирован разделительным сильфо- ном 7 Проточная камера 3 снабжена входным 8 и выходным 9 штуцерами. Внутри поплавка 4 размещен блок температурной компенсации, содержащий компенсационную полость 10, размещенную на переднем
VJ
О
00
о о о
торце поплавка и узел компенсационного еильфона 11, размещенный на заднем торце поплавка. Полости компенсационного еильфона 1Т капилляром 12 сообщена с компенсационной полостью 10. Узел компенсационного еильфона 11 содержит компенсационный сияьфон 13, подвижный бурт которого соединен штоком 14 с помощью трех винтов 15с компенсационным грузом 16. Винты 1.5 проходят через продольные пазы в распорной трубе 17, закрепленной на переднем торце 18 поплавка 4 и узле компенсационного сил ьфона 11.
На распорной трубе винтами 19 закреплены опорные ступицы 20, к которым винтами 21 прикреплены упругие направляющие 22, к которым винтами 23 прикреплен (подвешен) компенсационный груз 16. Внутри компенсационной полости 10 поплавка 4 размещен регулировочный сильфон 24, подвижный бурт которого регулировочной шпилькой 25 соединен с наружным торцем полости штока 5 с помощью П-образного кронштейна 26 и гаек 27. Проточная камера 3 заполнена контролируемой жидкостью 28, а компенсационная полость 10 и полость компенсационного еильфона 11 поплавка 4 заполнены компенсационной жидкостью 29., - . - ;. ;; .: . .
Блок формирования выходного сигнала 2 содержит рычаг 30, закрепленный на полом штоке 5, с рычагом 30 соединены подвижные бурты сильфонов обратной связи 31 и 32 и заслонка 33, перекрывающая со- .пло 34.
В блок формирования выходного сигнала 2 входят также узел корректировки нуля с пружинами 35 и 36 и винтом настройки нуля 37, а также пневмоусилитель 38 и жидкостный демпфер 39.
Плотномер работает следующим образом. Контролируемая жидкость 28 через входной штуцер 8 входит в проточную камеру 3, омывает поплавок 4 и выходит через выходной штуцер 9. На поплавок 4 со стороны контролируемой жидкости 28 действует выталкивающая сила, поворачивающая кинематическую систему плотномера (рычаг 5 и сильфон 7) на некоторый угол. При этом на блоке формирования выходного сигнала 2, формируется выходной сигнал, пропорциональный плотности контролируемой жидкости 28, так как рычаг 30 поворачивается на такой же угол, как и шток 5 относительно опоры 6- При этом изменяется зазор между заслонкой 34 и соплом 33, и изменится давление, обрабатываемое узлом сопло-за- слонка. Это давление, усиленное пневмоу- силителем 38, является выходным сигналом плотномера РВЫХ. Это.же давление РВых вводится в полости сильфонов обратной связи 31 и 32, формируя усилие силовой компенсации и обеспечивая тем самым высокую точность измерений. Начальное значение
выходного сигнала настраивается винтом корректора нуля 37. В установившемся режиме (при постоянной плотности контролируемой жидкости и постоянной ее температуре) выходной сигнал плотномера
устанавливается равным какому-то постоянному значению.
При изменении плотности контролируемой жидкости устанавливается новое соотношение между выталкивающей и
погружающей силами, действующими на поплавок, и устанавливается новое значение выходного сигнала.
При неизменной собственной (физической) плотности контролируемой жидкости,
но при изменении ее температуры, изменится Действительное значение плотности жидкости: при повышении температуры плотность уменьшится, при понижении температуры - плотность увеличится. Соответственно изменится и величина выталкивающей силы Рвыт., действующей на поплавок, а значит и выходной сигнал изменится в соответствующую сторону.
Для исключения влияния изменения
температуры контролируемой жидкости на результаты измерения плотности этой жидкости необходимо такое компенсирующее воздействие на измерительную кинематиче- скую систему плотномера со стороны блока
температурной компенсации, при котором при любых значениях температуры контролируемой жидкости (при неизменной собственной плотности жидкости) выходной сигнал плотномера оставался бы неизменным.
Условие равновесия кинематической системы плотномера при любых температурах (но постоянной плотности) контролируемой жидкости имеет вид
ДМР ДМК.(1) ДМР Л Рвыт. U, (2)
где ДМр - изменение рабочего крутящего момента плотномера относительно опоры вращения 6,
ДРвыт. - изменение выталкивающей си лы, действующей на поплавок, от изменения температуры на величину Д t, - расстояние от оси опоры вращения 6 до геометрического центра поплавка;
ДМ - изменение компенсационного крутящего момента относительно оси опоры вращения 6.
Изменение компенсационного крутящего момента зависит только от изменения положения груза 16 относительно опоры вращения 6, т. к. центр масс остальных частей поплавка остается неизменным. Поло- жение же груза 16 относительно опоры б (величина плеча Lrp.) зависит от объема компенсационной жидкости 29 в компенсационной полости поплавка, При увеличении температуры контролируемой жидкости 28 увеличивается и температура компенсационной жидкости 29.
Объем компенсационной жидкости увеличится, компенсационный сильфон 13 сожмется и переместит компенсационный груз 16 в сторону опоры вращения 6. При понижении температуры контролируемой жидкости понизится и температура компенсационной жидкости, объем ее уменьшится и компенсационный груз переместится в противоположную сторону. Изменение компенсационного усилия, вызванное изменением температуры контролируемой и компенсационной жидкости, определяется выражением:
ДМк СгРА1гр,
(3)
где Сгр. - масса компенсационного груза,
A Lrp. - температурное изменение пле- ча - положения груза относительно опоры 4,
Изменение рабочего крутящего момента, вызванное изменением температуры контролируемой жидкости на величину, оп- ределяется выражением
АМР Vn-p-pVAt Ln, (4)
где Vn - наружный объем поплавка;
р - плотность контролируемой жидкости;
рп- коэффициент температурного объемного расширения измеряемой (контролируемой) жидкости,
Температурное изменение плеча груза A Lrp. зависит от изменения объема компенсационной жидкости:
ALr
ДУ«.ж.,.
-гр (5)
где A VK ж. - температурное изменение объ- ема компенсационной жидкости от изменения температуры на величину At;
SK - эффективная площадь компенсаци- онного сильфона.
Температурное изменение объема компенсационной жидкости определяется выражением
AWx. VK.J« -/V At.
(6)
где pk - коэффициент температурного рас ширения компенсационной жидкости;
Vie.ж. - объем компенсационной жидкости в компенсационной прлости.
Подставив (6) в (5), а затем (5) - в (3), получим
АН Vic.x. pV At,. А Мк Сгр. . (7)
Подставив (4) и (7) в (1), получим Vn -p-pVAt- Ln (8)
Уравнение (8) выражает условие обеспечения температурной компенсации плотномера для принятых конструктивных характеристик плотномера (объема поплавка, веса компенсационного груза, объема жидкости в компенсационной полости, эффективной площади компенсационного сильфона, длины плеча от оси опоры вращения до геометрического центра поплавка), от плотности контролируемой жидкости и от коэффициента объемного расширения контролируемой и компенсационной жидкостей.
Из (8) получаем выражение для определения необходимого объема компенсационной жидкости (при известных остальных параметрах плотномера):
VK
Vn-p-pVSrlr,
Crp. pV
(9)
Если же задаться количеством компенсационной ЖИДКОСТИ УК.Ж., ТО ИЗ (8) МОЖНО
определить массу компенсационного груза, необходимого для обеспечения температурной компенсации плотномера:
-гр
, Vn-p-pVSc-U УК.Ж. рк (10)
Оперируя выражениями (8), (9) и (10), можно выбрать оптимальные конструктивные параметры плотномера.
Из выражений (6) и (5) видно, что, при уже выбранных остальных конструктивных параметрах плотномера, наибольшее изменение плеча установки компенсационного груза обратно пропорционально эффективной площади компенсационного сильфона SK. Т. е, чем меньше эффективная площадь этого сильфона, тем эффективней температурная компенсация.
Следует также указать, что начальное равенство моментов относительно опоры вращения от воздействия на поплавок выталкивающей и погружающей сил имеет
вид:
Рвыт. Ln См.п. Хм.п. + Сгр. Lrp., (11)
где См.п. - вес металлоконструкций поплавка (без массы компенсационного груза),
.п. - величина плеча от оси опоры вращения до центра масс См.п.
Lrp. - величина плеча от оси опоры вращения до оси балансировочного груза.
Из (11) следует, что чем больше плечо Up. (т, е. чем дальше компенсационный груз размещен от опоры вращения), тем меньше масса компенсационного груза по абсолютной величине, а значит и меньше суммарная масса поплавка.
Из выражений (3) и. (11) видно, что температурная компенсация может быть обеспечена для довольно широкого диапазона плотностей контролируемой жидкости: чем больше возможность изменения плеча установки груза Lrp. тем больший диапазон плотностей охватывает плотномер. В предложенном плотномере, за счет наличия распорной трубы между внутренними торцами сильфона,обеспечено размещение компенсационного груза практически по всей длине поплавка, что расширяет область измерений плотномера: при начальном размещении компенсационного груза ближе к опоре вращения обеспечивается возможность контроля жидкости с меньшей плотностью, при начальном размещении груза вблизи дальнего (от опоры вращения) торца поплавка обеспечивается контроль жидкости с большей плотностью..
Минимальная температурная инерционность системы термокомпенсации плотномера достигается размещением максимального количества компенсационной жидкости в зоне интенсивного теплообмена с контролируемой жидкостью - на торцах поплавка. С этой же целью ограничен до минимума объем компенсационной жидкости внутри компенсационной полости..
Для обеспечения соблюдения условий равенства (8) в реальных условиях, когда все конструктивные элементы плотномера имеют естественные отклонения от номинальных величин (за счет поля допусков на размеры, за счет разброса эффективных площадей сильфонов, которые достигают 2,5 -4,0 % от номинала) в предлагаемом плотномере имеется механизм регулирования объема компенсационной жидкости: из- меняя деформацию, регулировочного
сильфона 24 (вращением гаек 27), при зафиксированном донышке сильфона 13, изменяют в большую или меньшую сторону объем компенсационной полости (до ее герметизации), а следовательно, и объем ком- пенса-ционной жидкости.
Узел регулирования выполняет еще одну функцию: вращением гаек 27, при незафиксированном положении донышка
смльфона 13, изменяют деформацию регулировочного сильфона 24, (при герметизированной компенсационной полости), что приводит к перемещению донышка компенсационного сильфона 13, а следовательно, и
к перемещению компенсационного груза 16 в ту или иную сторону, Таким образом устанавливается оптимальное исходное положение груза, что обеспечивает усреднение (оптимизацию) температурной погрешности плотномера.
Важным отличительным признаком предложенного плотномера является крепление компенсационного груза 16 на упругих направляющих 22. Подвешенный на
упругих направляющих 22 груз 16 перемещается вдоль оси поплавка без трения - только за счет прогиба упругих направляющих. Это обеспечивает стабилизацию температурной компенсации плотномера при
изменении знака изменения температуры контролируемой жидкости, На графике фиг. 3 видно, что при изменении, например температуры контролируемой жидкости от 190°С до 210°С и обратно до 190РС выходной сигнал плотномера изменяется закономерно: и при изменении температуры от меньшей к большей, и при изменении температуры от большего значения к меньшему величина температурной погрешности имеет одинаковую величину Д Pt и одинаковый знак (график а).
У плотномера же прототипа, у которого компенсационный груз перемещался непосредственно по направляющей, из-за
влияния сил трения при обратном знаке изменения температуры контролируемой жидкости (от 210°С к 190°С) выходной сигнал плотномера не возвращался к значениям прямого хода температур (от 190°С к 210°С),
а оказывался завешенным на 5 - 8 %, что очень много для точных плотномеров (гра: фик 36).
Таким образом, упругая подвеска компенсационного груза в предложенном плотномере позволяет стабилизировать температурную компенсацию плотномера.
Кроме того, установка компенсационного груза на упругих подвесках позволяет отказаться от пружины возврата груза: роль
этой пружины выполняют сами упругие направляющие: при уменьшении температуры контролируемой и компенсационной жидкостей они возвращают груз в исходное положение.
Формула изобретения Плотномер жидкостей, содержащий проточную камеру с упругим гермовыводом, измерительную кинематическую систему с поплавком, штоком и опорой вращения, соединенную с блоком формирования выходного сигнала, и размещенный внутри поплавка жидкостно-грузовой блок температурной компенсации с компенсационным
0
сильфоном, компенсационным грузом и пружиной возврата груза, отличающий- с я тем, что. с целью расширения области применения и повышения точности определения, пружина возврата груза выполнена в виде упругих направляющих с опорными ступицами, поплавок снабжен распорной трубкой, закрепленной на противоположных торцах поплавка, компенсационный груз соединен с компенсационным сильфоном посредством штока, размещенного в распорной трубе, и подвешен на упругих направляющих, опорные ступицы которых закреплены на распорной трубе.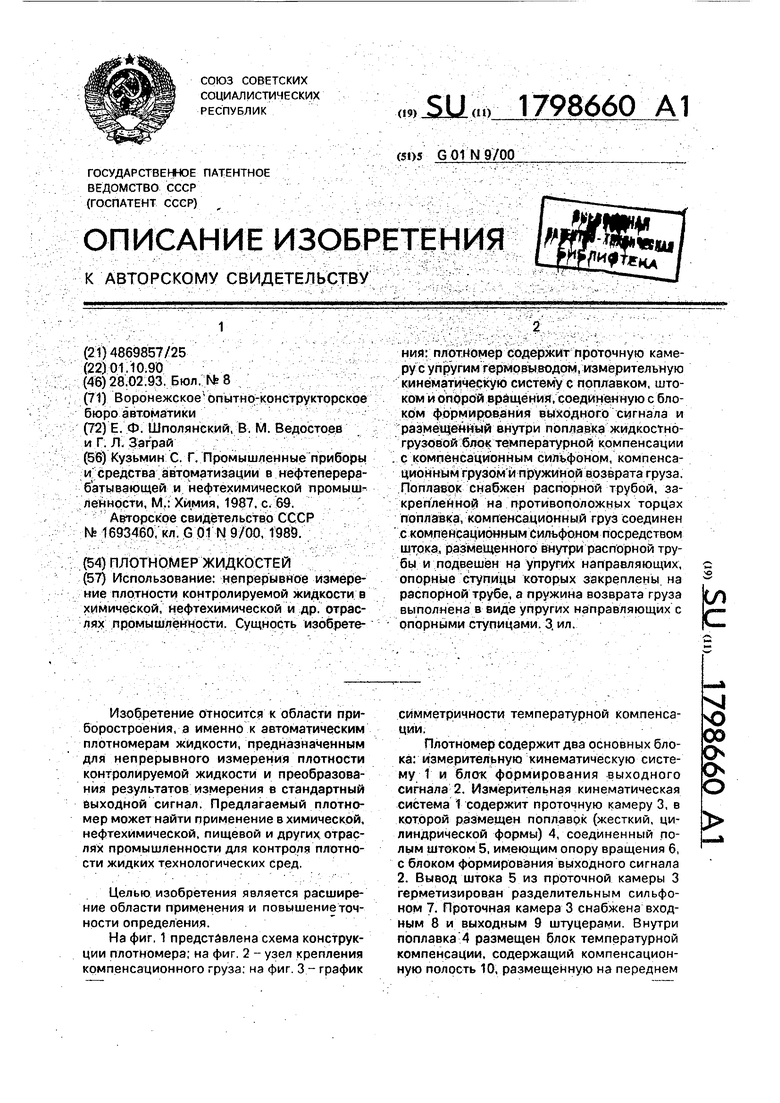



| название | год | авторы | номер документа |
|---|---|---|---|
| Плотномер жидкостей | 1990 |
|
SU1803812A1 |
| Плотномер жидкостей | 1989 |
|
SU1693460A1 |
| Плотномер жидкости | 1989 |
|
SU1656405A1 |
| Поплавковый плотномер жидкостей | 1989 |
|
SU1679273A1 |
| Поплавковый плотномер жидкостей | 1991 |
|
SU1806340A3 |
| Поплавковый плотномер жидкостей | 1991 |
|
SU1827584A1 |
| Плотномер жидкости | 1977 |
|
SU1052932A1 |
| Плотномер жидкости поплавкового типа | 1977 |
|
SU1052930A1 |
| Поплавковый плотномер жидкостей | 1990 |
|
SU1749762A1 |
| Поплавок плотномера жидкости | 1984 |
|
SU1288549A1 |
Использование: непрерывное измерение плотности контролируемой жидкости в химической, нефтехимической и др. отраслях промышленности. Сущность изобретения: плотномер содержит проточную камеру с упругим гёрмрвыводом, измерительную кинематическую систему е поплавком, штоком и опорой вращения, соединенную с блоком формирования выходного сигнала и размеренный внутри поплавка жидкостно- грузовой:блок температурной компенсации с компенсационным сйл:ьфоном, компенсационным грузом й пружиной возврата груза. Поплавок снабжен распорной трубой, закрепленной на противоположных торцах поплавка, компенсационный груз соединен с компе нсацирнн ым сильфрном пос редетвом штока, размещенного внутри распорной трубы и подвешен на упругих направляющих, опорные ступицы которых закреплены на распорной трубе, а пружина возврата груза выполнена в виде упругих направляющих с опорными ступицами. 3. ил. Ч fe
Фиг. 1
Цых кгс/см2
ФЦЈ;2
№ т т 190 W-j-ef
190 1$о 200 200 2Ю 210
Фиг.З
| Кузьмин С | |||
| Г | |||
| Промышленные приборы и средства.автоматизации в нефтеперерабатывающей и нефтехимической промыш леннрсти, М.: Химия, 1987, с | |||
| Способ приготовления пищевого продукта сливкообразной консистенции | 1917 |
|
SU69A1 |
| Сортирующее и собирательное приспособление для писем и пакетов | 1928 |
|
SU16934A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
