Изобретение относится к радиотехнике и может использоваться в радиолокационных и связных системах для выделения широкополосных и узкополосных сигналов с произвольными законами амплитудной и фазовой модуляции на фоне коррелированных шумовых помех.
Целью изобретения является повышение помехозащищенности устройства.
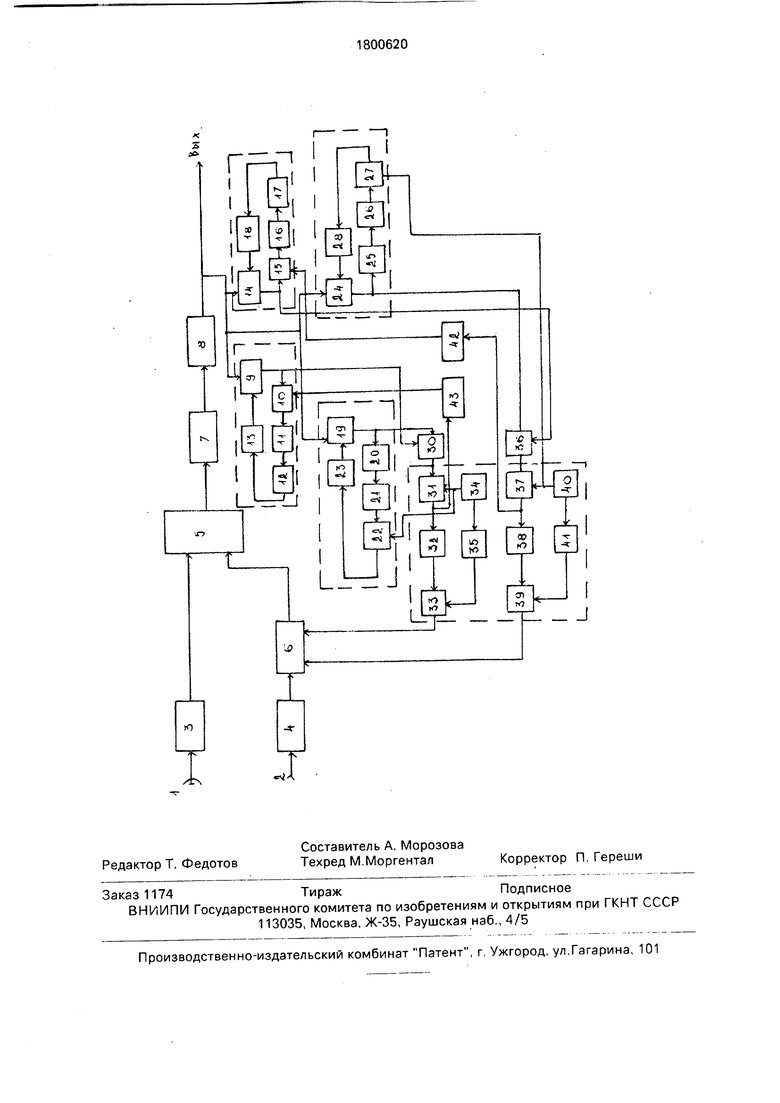
На чертеже приведена структурная электрическая схема предлагаемого устройства.
Адаптивное устройство подавления помех содержит основную антенну 1, компенсационную антенну 2, малошумящие усилители 3, 4, высокочастотный (ВЧ) тройник 5, квадратурный модулятор 6, преобразователь 7 частоты, полосовой фильтр 8, регулируемые усилители 9, 14, 19, 24, ключи 10,15, амплитудные детекторы 11, 16,20,25, режекторные фильтры 12, 17, интегрирующие фильтры 13, 18, 23, 28, узкополосные фильтры 21, 26, перемножители 30, 36, процессор 29, синхронные детекторы 31,37, 22,
27, регулируемые аттенюаторы 35, 41, сумматоры 33, 39, генераторы поисковых колебаний 34, 40, пороговые элементы 42, 43.
Адаптивное устройство подавления помех содержит соединенные последовательно основную антенну 1, первый малошумящий усилитель 3, высокочастотный тройник 5, преобразователь частоты 7, полосовой фильтр 8, выход которого является выходом устройства, соединенные последовательно компенсационную антенну 2, второй малошумящий усилитель 4, квадратурный модулятор 6, выход которого соединен с другим входом высокочастотного тройника 5, процессор 29, состоящий из двух каналов, каждый из которых содержит соединенные последовательно генератор поисковых колебаний 34 (40), первый синхронный детектор 31 (37), другой вход которого является входом соответствующего канала процессора 29, первый интегрирующий фильтр 32(38) и сумматор 33 (39), выход которого является выходом соответствующего канала процессора 29 и соединен с
LO
С
оо О О О N3 О
соответствующим входом квадратурного модулятора 6, регулируемый аттенюатор 35 (41), вход и выход которого соединены соответственно с выходом генератора поисковых колебаний 34 (40) и с другим входом сумматора 33 (39). Кроме того устройство содержит перемножители 30 и 36, выходы которых соединены соответственно со входами первого и второго каналов процессора, первый и второй пороговые элементы 42 и 43, входы которых соединены соответственно с выходом синхронного детектора 37 и 31 первого и второго каналов процессора 29, две ветви, каждая из которых содержит соединенные последовательно ключ 10 (15), управляющий вход которого соединен с выходом соответствующего порогового элемента 43 (42), первый амплитудный детектор 11 (16), режекторный фильтр 12 (17), второй интегрирующий фильтр 13 (18) и первый регулируемый усилитель 9 (14), выход которого соединен со входом ключа 10 (15) и с первым входом соответствующего номеру ветви перемножителя 30 (36), а вход первого регулируемого усилителя каждой ветви 9 (14) соединен с выходом полосового фильтра 8, другие две ветви, каждая из которых содержит, соединенные последовательно второй амплитудный детектор 20 (25), узкополосный фильтр 21 (26), второй синхронный детектор 22 (27), другой вход которого соединен с выходом генератора поисковых колебаний соответствующего канала процессора 29, третий интегрирующий фильтр 23 (28) и второй регулируемый уси- литель 19 (24), выход которого соединен со входом второго амплитудного детектора 20 (25) и со вторым входом соответствующего номеру ветви перемножителя 43 (42), а вход второго регулируемого усилителя 19 (24) каждой ветви соединен с выходом полосового фильтра.
Устройство работает следующим образом.-
При появлении помехи Una на входах основной и компенсационной антенн 1,2 на выходе полосового фильтра 8, который определяет отношение помеха/шум на входах регулируемых усилителей 9, 14, появляется сигнал, зависящий от уровня помехи:
Д U Uo-UY Wi-UY W2, (1)
где Uo Опо + Осо + Ошо - сумма помехи, сигнала и шума;
Ui 0ni + иС1 + 0Ш1,
Wi Ci + /Sen- комплексный вес в синфазной ветви;
Л/2 С.2 +Р oz комплексный вес в квадратурной ветви;
Ci, 62 весовые коэффициенты;
di и az - поисковые колебания на выходе генераторов 34 и 40.
/3- коэффициент модуляции.
Вследствие независимости колебаний #1 и «2, что достигается соответствующим выбором форм сигналов генераторов 34 и 40, напряжения и UciW2 в синфазной и квадратурной ветвях модулятора изменяются независимо друг от друга, т.е. осуществляется взвешивание сигнала помехи по амплитуде и фазе. Изменения амплитуды и фазы помехи Uni на выходе модулятора 6 осуществляются до тех пор, пока градиент показателя качества VP (Wi, Л/2) не будет равен нулю, что соответствует минимальному значению мощности помехи на выходах перемножителей 30 и 36. Приближенная оценка градиента функционала качества VP (Wi, Wa) осуществляется синхронными детекторами 31 и 37, на вторые входы которых поступает колебание а ( от генераторов 31 и 40. В качестве поисковых колебаний «1 и аг используются колебания прямоугольной формы на частоте порядка 100 (200) кГц, в которых изменение знака (формы колебаний) изменяется по закону, определяемому псевдослучайной последовательностью. Сигнал с выходов синхронных детекторов 31 и 37, пропорциональный частотным производHbiMVP(Wi,W2)(,, подаети 38, где
aWi д Л/2
ся на интегрирующие фильтры 3 происходит формирование весовых коэффициентов Ci и С2.
Уровень модуляции поискового колебания/5 устанавливается регулируемыми аттенюаторами 35 и 41.
В установившемся режиме напряжение на выходе ВЧ тройника 5 равно:
AU (U0-UsiCi-UciC2)- - }3aiUsi+ a2Uc2).
(2)
Уровень помехи Д Uni в первых скобках стремится к некоторому минимальному значению при коэффициенте корреляции помехирп 1, что достигается практически размещением дополнительной антенны вертикально над основной антенной и выносом модулятора 6 как можно ближе к антенне 2, чтобы обеспечить высокую равномерность АЧХ и ФЧХ в полосе частот помехи на входах ВЧ тройника 5.
Для обеспечения линейности при преобразованиях колебания AU в петле обратной связи, устранения влияния полезного сигнала на формирование весовых коэффициентов Ci и С2 и повышение сходимости процесса адаптации автоматическая регулировка усиления в петле обратной связи осуществляется раздельно по полезному сигналу и помехе. В этом случае весовые коэффициенты Ci и С2 равны:
c V(cS)2+(d)2
где.
Gi
Ксп
( 1 + Ki DC )
j3GiG2U0Ui 1 + /3GiG2Ul
(3)
К02 (1 + K2 Л1Гп2 )
/ -коэффициент модуляции (ft - . „, .
Формирование коэффициента передачи GI усилителей 9, 14 осуществляется в установившемся режиме, чтобы уменьшить влияние остатка помехи AUni на формирование управляющего напряжения регулирования в петле АРУ усилителей 9 и 14. Режекторные фильтры 12, 17 ослабляют на 40...60 дБ колебания с частотами сп и озд.е. колебание А2/42. Так как в установившемся режиме Д Uni « Uc, то управляющее напряжение равно:
р К1АРУ Усвых ,
где /5 Ki АРУ Ki.
Формирование управляющего напряжения происходит после того, как алгоритм адаптации находит в процессе поиска стационарную точку: V Р (Wi, W2) 0. Так как практически градиент V Р(Л/1,Л/2) совершает флуктуации, вызванные приближенной его оценкой в синхронных детекторах 31 и 37, то в пороговых элементах 42 и 43 устанавливается порог Јч и Ј2, выбираемый для стационарного режима. В случае V P(Wi,) |п Ј2 пороговые элементы 42 и 43 вырабатывают импульсы, которые открывают ключи 10 и 15. После этого начинается процесс регулирования напря- жения Д U по единой оценке полезного сигнала Uc.
Формирование коэффициента передачи G2 усилителей 19 и 24 осуществляется по остатку помехи: A Un2 p (Usni + Ucni).
Чтобы полезный сигнал Uc не оказывал влияния на формирование управляющего напряжения , в петле обратной связи усилителей 19 и 24 включены узкополосные фильтры 21, 26 и старые синхронные детекторы 22, 27. Узкополосные фильтры 21, 26 настроены на колебания а и аг и опреде- AUni AUn2 AUC
ляют отношения
на
ULUUuj ULLI
первых входах вторых синхронных детекторов 22,27. После снятия манипуляции в блоках 22, 27 на выходах интегрирующих
AUn2
фильтров 23 и 28 отношение улучша
ется в базу (В) раз. Как правило, чтобы полAUn2
учить соотношение
10 достаточно
выбрать базу сигналов а и «г на уровне 50...100. В этом случае напряжение регули- рования равно:
рК2ПАРУ , (5)
крутизна регулировочной характеристики;
К2ПАРУ - коэффициент усиления в петле АРУ.
Постоянная времени интегрирующих фильтров 13, 18, 23, 28 выбирается равной:
(6)
35
40
где тст 0,1...1 с - постоянная времени интегрирующих фильтров 32 и 38.
Анализ выражения (3) показывает значительное снижение влияния мощности помех на сходимость процесса адаптации. В этом случае динамическая постоянная времени интегрирующих фильтров 32 и 38, определяющая скорость сходимости, будет равна:
45
Тп Тст
1 +yySGi С21Я
где Gi, G2 определяются в соответствии с
выражением (3).
Скорость сходимости процесса адаптации увеличивается в 5...10 раз. Особенно сокращается процесс сходимости при воздействии слабых помех.
Введение АРУ по полезному сигналу уменьшило влияние флуктуации весовых коэффициентов СИ и С2 и смещение весов на эффективность компенсации помех из-за снижения влияния комбинационной составляющейУсо Uni в числителе выражения (3), что позволило получить выигрыш в степени компенсации помех на 10...20 дБ.
В целом комплексирование систем АРУ по помехе и полезному сигналу повысило устойчивость петли обратной связи в широком динамическом диапазоне изменений мощностей помех и полезного сигнала на входах антенн 1 и 2.
Формула изобретения Адаптивное устройство подавления помех, содержащее соединенные последовательно основную антенну, первый малошумящий усилитель, высокочастотный тройник, преобразователь частоты, полосовой фильтр, выход которого является выходом устройства, соединенные последовательно компенсационную антенну, второй малошумящий усилитель, квадратурный модулятор, выход которого соединен с другим входом высокочастотного тройника, процессор, состоящий из двух каналов, каждый из которых содержит соединенные последовательно генератор поисковых колебаний, первый синхронный детектор, другой вход которого является входом соответствующего канала процессора, первый интегрирующий фильтр и сумматор, выход которого является выходом соответствующего канала процессора и соединен с соответствующим входом квадратурного модулятора, регулируемый аттенюатор, вход и выход которого соединены соответственно с выхбдом генератора поисковых колебаний и с другим входом сумматора, отличающееся тем, что, с целью повышения помехозащищенности, в него введены первый и второй перемножители, выходы которых соединены
соответственно с входами первого и второго каналов процессора, первый и второй пороговые элементы, входы которых соединены соответственно с выходом синхронного детектора первого и второго каналов процессора, две ветви, каждая из которых содержит соединенные последовательно ключ, управляющий вход которого соединен с выходом соответствующего порогового элемента, первый амплитудный детектор,
режекторный фильтр, второй интегрирующий фильтр и первый регулируемый усилитель, выход которого соединен с входом ключа и с первым входом соответствующего номеру ветви перемножителя, а вход первого регулируемого усилителя каждой ветви соединен с. выходом полосового фильтра, другие две ветви, каждая из которых содержит соединенные последовательно второй амплитудный детектор, узкополосный фильтр, второй синхронный детектор, другой вход которого соединен с выходом генератора поисковых колебаний соответствующего канала процессора,третий интегрирующий фильтр и второй регулируемый усилитель, выход которого соединен с входом второго амплитудного детектора и с вторым входом соответствующего номеру ветви перемножителя, а вход второго регулируемого усилителя каждой ветви соединен с выходом полосового фильтра.
I
Г.



| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный компенсатор помех | 1991 |
|
SU1807570A1 |
| Адаптивный компенсатор помех | 1989 |
|
SU1758877A1 |
| МОНОИМПУЛЬСНАЯ РЛС МИЛЛИМЕТРОВОГО ДИАПАЗОНА | 2015 |
|
RU2600109C1 |
| Устройство компенсации помех | 1989 |
|
SU1734216A1 |
| АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2012 |
|
RU2531562C2 |
| КОМПЕНСАТОР ШУМОВОЙ ПОМЕХИ | 1998 |
|
RU2137297C1 |
| Способ передачи и приёма сигналов квадратурной амплитудной модуляции | 2024 |
|
RU2826842C1 |
| Устройство компенсации помех, принимаемых по боковым лепесткам диаграммы направленности основной антенны | 1988 |
|
SU1660179A1 |
| АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2010 |
|
RU2451373C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ И ОБРАБОТКИ СИГНАЛОВ ДЛЯ РЛС С ЧАСТОТНО-СКАНИРУЮЩЕЙ АНТЕННОЙ РЕШЕТКОЙ | 2008 |
|
RU2365935C1 |
Использование: радиотехника, радиолокационные и связные системы. Сущность изобретения: в адаптивном устройстве подавления помех уменьшено влияние мощности помех на сходимость процесса адаптации, что особенно заметно при воздействии слабых помех, использование автоматической регулировки по мощному сигналу в петле обратной связи автокомпенсатора уменьшает флуктуацию весовых коэффициентов, что и позволяет повысить помехозащищенность. 1 ил.
| Патент США № 4320535, кл.455-278,1982. |
