Предлагаемое изобретение относится к радиолокационной измерительной технике и может быть использовано в радиолокаторах миллиметрового диапазона.
РЛС миллиметрового диапазона является альтернативой инфракрасным и лазерным датчикам координат цели, работающим на конечном участке полета ЛА. В отличие от них РЛС миллиметрового диапазона устойчиво обнаруживает цели в условиях тумана, пыли, в любое время суток и времени года. Работа в миллиметровом диапазоне позволяет сократить габаритно-массовые характеристики антенной системы. В условиях возможного радиопротиводействия противника для любой РЛС актуальным является повышение скрытности и помехозащищенности, что достигается в том числе применением сложных сигналов и когерентного межпериодного накопления.
Известна РЛС миллиметрового диапазона [1, fig. 1], в которой с помощью трех синтезаторов частот, синхронизируемых кварцевым генератором и применяющих петли фазовой автоподстройки частоты, формируются немодулированные спектрально чистые частоты: промежуточная частота fПР1 в диапазоне 1000-2000 МГц, первичная гетеродинная частота fГ0 и частота второго гетеродина fГ2, сигнал первого синтезатора на частоте fПР1 поступает на модулятор, на вход которого приходит сигнал генератора модулирующего сигнала, в модуляторе спектр модулирующего сигнала переносится на промежуточную частоту, временным стробированием выходного сигнала модулятора на интервале зондирующего импульса вырезается импульс, усиливается в первом усилителе, переносится на несущую частоту с помощью первого смесителя и сигнала первой гетеродинной частоты, приходящего на его второй вход, фильтруется первым полосовым фильтром, последовательно усиливается управляемым усилителем и усилителем мощности, проходит через переключатель прием-передача на суммарный порт моноимпульсной антенны и излучается. Сигнал первой гетеродинной частоты fГ1 получают путем последовательного умножения частоты fГ0 в М раз, селекции вторым полосовым фильтром, умножения частоты в N раз, селекции по частоте третьим полосовым фильтром, усиления во втором усилителе, деления по мощности пополам, с первого выхода делителя мощности сигнал первой промежуточной частоты поступает на второй вход первого смесителя, со второго выхода делителя мощности он же поступает на второй вход второго смесителя. Отраженный сигнал принимается моноимпульсной антенной, с суммарного порта которой сигнал поступает на переключатель прием-передача, выходные сигналы разностного порта моноимпульсной антенны и переключателя прием-передача поступают на переключатель суммарного и разностного сигналов, с выхода которого с разделением во времени суммарный и разностные сигналы выдаются на приемник, состоящий из последовательно соединенных мало шумящего усилителя, четвертого полосового фильтра, второго смесителя, усилителя промежуточной частоты, пятого полосового фильтра, демодулятора, на вход которого поступает вторая гетеродинная частота. На выходе демодулятора получают квадратурный отраженный сигнал на второй промежуточной частоте, который оцифровывается аналого-цифровым преобразователем и далее обрабатывается процессором с целью обнаружения цели и определения ее координат.
Достоинством РЛС является хорошее подавление зеркальной частоты и соседних каналов приема за счет применения в приемнике двух промежуточных частот.
Недостатком РЛС является сложность обеспечения требуемой развязки между каналом формирования модуляции зондирующего сигнала на промежуточной частоте с каналом усиления принятого сигнала на промежуточной частоте, при этом перегружается приемник и снижается его чувствительность. Кроме того, прием суммарных и разностных сигналов с разделением по времени увеличивает время и погрешность измерения.
Другой вариант РЛС миллиметрового диапазона, принятый в качестве прототипа, приведен в [1, fig. 2]. В данной РЛС на частоте f1, много большей ширины спектра зондирующего сигнала, синтезируется периодический опорный сигнал, первый участок периода, определяемый длительностью зондирующего сигнала, соответствует модуляции зондирующего сигнала, второй участок, определяемый интервалом приема, соответствует немодулированному гетеродинному сигналу приемника, разность частот сигнала Δf на участках периода повторения соответствует промежуточной частоте приемника отраженных сигналов, опорный сигнал умножается по частоте в N раз, селектируется по частоте полосовым фильтром, усиливается, делится по мощности, поступает на передающую и приемную ветвь, сигнал приемной ветви является гетеродинным, поступающим на второй вход смесителя, в передающей ветви сигнал умножается по частоте еще в N раз, из него с помощью ключа вырезается участок, соответствующий зондирующему сигналу, селектируется по частоте полосовым фильтром, через последовательно соединенные усилитель с управляемым усилением, усилитель мощности, переключатель прием-передача (антенный переключатель) импульсный СВЧ-сигнал поступает на суммирующий вход - выход моноимпульсной антенной системы и излучается в направлении сцены, отраженный сигнал принимается суммарным и разностными портами моноимпульсной антенны, при этом сигналы с суммарного порта моноимпульсной антенны через переключатель прием передача и разностного порта моноимпульсной антенны поступают на переключатель суммарного и разностных сигналов, где с разделением во времени проходят на последовательно соединенные малошумящий усилитель, полосовой фильтр (преселектор) и квадратурный балансный смеситель, подавляющий зеркальный канал, смешиванием отраженного сигнала (суммарного или разностного) с N-ной гармоникой гетеродинного сдвигают частоту принятого отраженного сигнала на промежуточную частоту fПР=N2Δf, квадратурные сигналы с выхода квадратурного балансного смесителя усиливаются в усилителях промежуточной частоты, селектируются фильтрами низкой частоты, оцифровываются и обрабатываются процессором.
Формирователь опорного сигнала содержит кварцевый генератор, синтезатор частоты смещения f0, генератор прямого цифрового синтеза, формирующего сигнал модулированной частоты fM, первый полосовой фильтр, первый и второй фильтры низкой частоты, квадратурный модулятор, выход которого через последовательно соединенные второй полосовой фильтр, умножитель частоты, третий полосовой фильтр и усилитель соединен с выходом формирователя опорного сигнала, при этом выход кварцевого генератора соединен с входами синтезаторов частот смещения и генератора прямого цифрового синтеза, выход синтезатора частоты смещения f0 через первый полосовой фильтр подключен к первому входу квадратурного модулятора, квадратурные выходы генератора прямого цифрового синтеза через соответствующие первый и второй фильтр низкой частоты подключены к второму и третьему входу квадратурного модулятора, синтезатор частоты смещения fo построен по схеме цифрового синтезатора частоты на базе генератора, управляемого напряжением, охваченного цепью фазовой автоподстройки частоты.
Программированием генератора прямого цифрового синтеза обеспечивается формирование любой частотной или фазовой внутри импульсной модуляции зондирующего сигнала.
Достоинством РЛС является хорошая частотная развязка между приемником и передатчиком за счет того, что на интервале передачи разность частот излучаемого сигнала и N-ной гармоники гетеродина всегда равна нулю, а разность частот отраженного сигнала и той же гармоники гетеродина на интервале приема соответствует промежуточной частоте, на которую настроен приемник. Этим обеспечивается высокая чувствительность приемника.
В рассмотренной РЛС для режекции канала зеркального приема применяют преселектор и квадратурный балансный смеситель. Наибольшее подавление зеркального канала достигается при высоких значениях промежуточной частоты. В то же время реализовать узкополосный прием в полосе частот зондирующего сигнала на высоких промежуточных частотах затруднительно, соответственно в полосе приема, большей ширины спектра частот зондирующего сигнала, имеются дополнительные паразитные каналы приема, по которым проходит помеха, снижающая чувствительность приемника и вероятность правильного обнаружения цели.
Недостатком рассмотренной РЛС с одной промежуточной частотой является то, что подавление зеркальных частот с помощью преселектора и квадратурного балансного смесителя не обеспечивает достаточной развязки от сигналов аналогичных РЛС, установленных на носителях залпа, работающих на близких частотах. Кроме того, прием суммарных и разностных сигналов с разделением по времени увеличивает время и погрешность измерения.
Целью предлагаемого изобретения является повышение помехозащищенности РЛС от взаимных помех и снижение погрешности измерения.
Заявленная цель достигается за счет использования в приемнике второй промежуточной частоты, приема суммарных и разностных сигналов без разделения во времени.
Предлагаемая РЛС содержит последовательно соединенные кварцевый генератор, синтезатор частоты смещения, первый полосовой фильтр, квадратурный модулятор и третий полосовой фильтр, генератор прямого цифрового синтеза, первый и второй выходы которого соединены с одноименными входами квадратурного модулятора, последовательно соединенные второй умножитель частоты и второй полосовой фильтр, третий умножитель частоты, последовательно соединенные четвертый полосовой фильтр и управляемый усилитель, ключ, последовательно соединенные усилитель мощности и антенный переключатель, моноимпульсная антенна, вход-выход которой соединен с вторым входом-выходом антенного переключателя, последовательно соединенные аналого-цифровой преобразователь (АЦП) и процессор, процессор обрабатывает оцифрованный отраженный сигнал путем согласованной фильтрации, вычисления спектра, порогового обнаружения сигналов цели, измерения дальности, радиальной скорости и пеленга цели, отличается тем, что вводится блок сдвига частоты, синхронизатор, последовательно соединенные через три однонаправленные связи блок преселекторов, блок малошумящих усилителей, блок балансных смесителей, блок преобразователей частоты и блок квадратурных фазовых детекторов, последовательно соединенные переключатель, четвертый умножитель частоты, пятый полосовой фильтр, усилитель мощности сигнала гетеродина, делитель мощности, первый, второй и третий выходы которого соединены с одноименными входами блока балансных смесителей, при этом выход кварцевого генератора соединен с первым входом синхронизатора, четвертым входом блока балансных смесителей и первым входом блока сдвига частоты, выход третьего полосового фильтра через блок сдвига частоты соединен с входом второго умножителя частоты, выход процессора соединен с вторыми входами синхронизатора и управляемого усилителя, первый выход синхронизатора соединен с одноименным входом генератора прямого цифрового синтеза, выход управляемого усилителя через ключ соединен с вторым входом усилителя мощности, выход второго полосового фильтра через последовательно соединенные переключатель и третий умножитель частоты соединен с входом четвертого полосового фильтра, второй выход синхронизатора соединен с первыми входами ключа, усилителя мощности и переключателя, первый и второй выходы генератора прямого цифрового синтеза соединены с одноименными входами блока квадратурных фазовых детекторов, шесть выходов которого соединены с одноименными входами АЦП, первый и второй выходы моноимпульсной антенны соединены с одноименными входами блока преселекторов, выход антенного переключателя соединен с третьим входом блока преселекторов, процессор управляет управляемым усилителем, через синхронизатор управляет генератором прямого цифрового синтеза, ключом, усилителем мощности и переключателем.
Работа РЛС поясняется дальнейшим описанием и чертежами.
На фиг. 1 приняты следующие обозначения:
1 - кварцевый генератор (KB);
2 - синтезатор частоты сдвига (СЧС);
3 - первый полосовой фильтр (ПФ1);
4 - блок сдвига частоты (СДЧ);
5 - второй умножитель частоты (УЧ 2);
6 - второй полосовой фильтр (ПФ 2);
7 - синхронизатор (СНХ);
8 - генератор прямого цифрового синтеза (ГПЦС);
9 - квадратурный модулятор;
10 - третий полосовой фильтр (ПФ 3);
11 - третий умножитель частоты (УЧ 3);
12 - переключатель (Пер);
13 - четвертый полосовой фильтр (ПФ 4);
14 - управляемый усилитель (У ус);
15 - ключ (Кл);
16 - усилитель мощности (УМ);
17 - антенный переключатель (АП);
18 - моноимпульсная антенна (MAC);
19 - аналого-цифровой преобразователь (АЦП);
20 - блок квадратурных фазовых детекторов (БКФД);
21 - блок малошумящих усилителей (БМШУ);
22 - блок преселекторов (БПС);
23 - четвертый умножитель частоты (УЧ 4);
24 - процессор (ПРЦ);
25 - блок преобразователей частоты (БПЧС);
26 - блок балансных смесителей (ББСМ);
27 - делитель мощности (ДМ);
28 - усилитель мощности сигнала гетеродина (УМГ);
29 - пятый полосовой фильтр (ПФ 5).
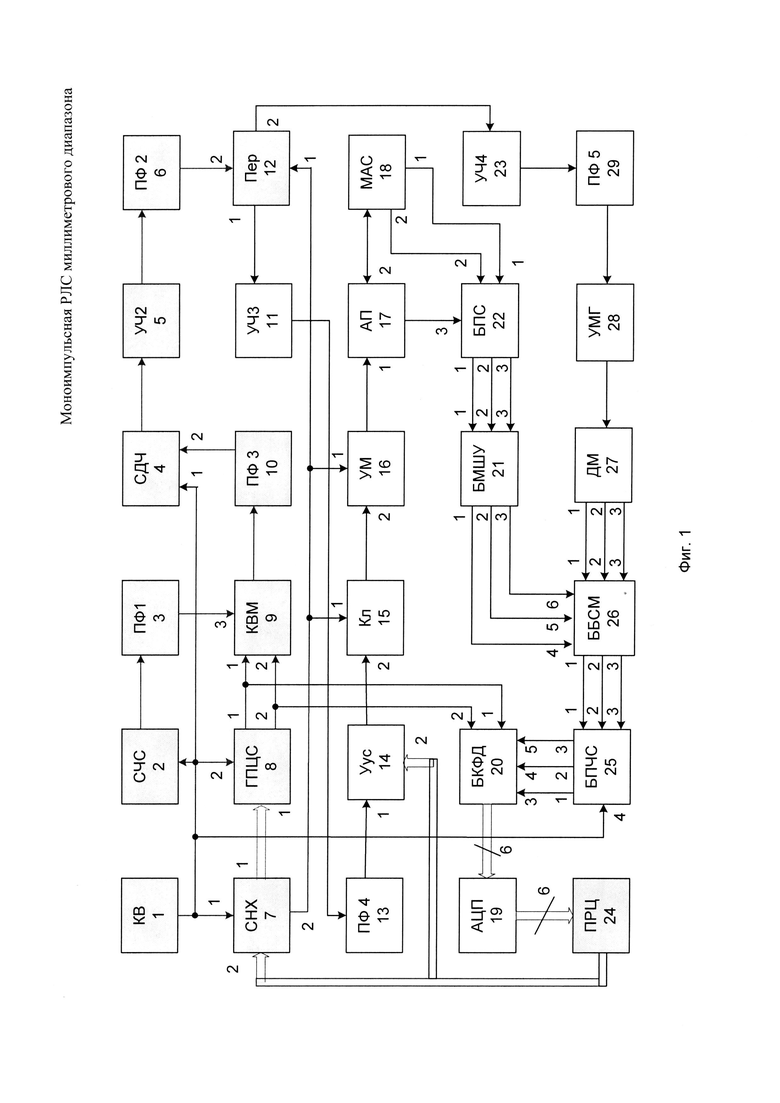
На фиг. 1 последовательно соединены кварцевый генератор 1, синтезатор частоты сдвига 2, первый полосовой фильтр 3, квадратурный модулятор 9, третий полосовой фильтр 10, блок сдвига частоты 4, второй умножитель 5, второй полосовой фильтр 6, переключатель 12, третий умножитель частоты 11, четвертый полосовой фильтр 13, управляемый усилитель 14, ключ 15, усилитель мощности 16, антенный переключатель 17, последовательно соединены через три однонаправленные связи блок преселекторов 22, блок малошумящих усилителей 21, блок балансных смесителей 26, блок преобразователей частоты 25 и блок квадратурных фазовых детекторов 20, второй выход переключателя 12 через последовательно соединенные четвертый умножитель частоты 23, пятый полосовой фильтр 29 и усилитель мощности сигнала гетеродина 28 соединен с входом делителя мощности 27, первый, второй и третий выходы которого соединены с одноименными входами блока балансных смесителей 26, первый и второй выходы генератора прямого цифрового синтеза 8 соединены с одноименными входами квадратурного модулятора 9, второй вход-выход антенного переключателя 17 соединен с входом-выходом моноимпульсной антенны 18, первый и второй выходы которой соединены с одноименными входами блока преселекторов 22, выход кварцевого генератора 1 соединен с первыми входами синхронизатора 7 и блока сдвига частоты 4, вторым входом генератора прямого цифрового синтеза 8 и четвертым входом блока преобразователей частоты 25, первый и второй выходы генератора прямого цифрового синтеза 8 соединены с одноименными входами блока квадратурных детекторов 20, шесть выходов блока квадратурных фазовых детекторов 20 через АЦП 19 соединены с одноименными входами процессора 24, выход процессора 24 через синхронизатор 7 соединен с первым входом генератора прямого цифрового синтеза 8, второй выход синхронизатора 7 соединен с первыми входами ключа 15, усилителя мощности 16 и переключателя 12, выход процессора 24 соединен с вторым входом управляемого усилителя 14.
Все элементы структур, изображенных на фиг. 1, известны и широко используются в современных радиоэлектронных устройствах, в том числе:
Синтезатор частоты сдвига 2 может быть выполнен либо методом гармоник по схеме [2, с. 17, рис. 1.4]; либо по схеме синтезатора с одной петлей фазовой автоподстройки частоты [2, с. 118];
Блок сдвига частоты 4 может быть выполнен с помощью петли фазовой автоподстройки частоты, используемой в качестве смесителя [2, с. 74, рис. 2.28];
Синхронизатор 7 может быть выполнен на базе программируемой интегральной схемы;
Генератор прямого цифрового синтеза 8 может быть выполнен на базе микросхемы 1508ПЛ8Т;
Реализация остальных элементов не требует пояснения.
Работа РЛС описывается со ссылками на фиг. 1 и происходит в следующей последовательности. Кварцевый генератор 1 формирует сигнал эталонной частоты fКВ, синхронизирующей работу синхронизатора 7, синтезатора частоты сдвига 2, генератора прямого цифрового синтеза 8 и блока сдвига частоты 4. Синхронизатор 7 в соответствии с управляющими сигналами, поступающими на его второй вход от процессора 24, формирует на втором выходе периодическую последовательность импульсов, определяющих период Т и длительность τИ зондирующего сигнала. На первом выходе синхронизатора 7 формируются команды, управляющие частотой fM (t) и фазой φM(t) сигнала на выходах генератора прямого цифрового синтеза 8. В зависимости от вида зондирующего сигнала на участке зондирующего сигнала 0≤t-nT≤τИ на первом и втором выходах генератора прямого цифрового синтеза 8 методом прямого цифрового синтеза формируются квадратуры сигнала с частотой fM(t). При этом:

где n - номер периода повторения зондирующих импульсов.
На участке приема τИ<t-nT<T на первом и втором выходах генератора прямого цифрового синтеза 8 формируются квадратуры немодулированного гармонического сигнала с частотой fM2.
Выходные квадратурные сигналы генератора прямого цифрового синтеза 8 поступают на квадратурный модулятор 9, на третий вход которого приходит непрерывный немодулированный гармонический сигнал сдвига, сформированный синтезатором частоты сдвига 2 и отфильтрованный первым полосовым фильтром 3. Частота сдвига f0>>ΔFC, где ΔFC - ширина спектра зондирующего сигнала. Квадратурный модулятор 9 с помощью входных сигналов формирует непрерывный сигнал, модулированный по частоте f1(t):

Выходной сигнал f1(t) квадратурного модулятора 9 через третий полосовой фильтр 10 поступает на блок сдвига частоты 4, где сдвигается по частоте на частоту сигнала кварцевого генератора, приходящего на его первый вход:
f2(t)=fКВ+f1(t)
Блок сдвига частоты 4 выполнен с помощью петли фазовой автоподстройки частоты, используемой в качестве смесителя, что позволяет перед последующим умножением частоты f2(t) снизить коэффициент умножения частоты до несущей и гетеродинной, повысить мощность умножаемого сигнала, соответственно обойтись без дополнительных промежуточных усилителей в цепочке умножения частоты.
Сигнал блока сдвига частоты 4 через второй умножитель частоты 5 и второй полосовой фильтр 6 поступает на переключатель 12, где в соответствии с сигналом синхронизатора 7 (временным положением зондирующего сигнала и окна приема) с разделением во времени проходит либо в цепь формирования зондирующего сигнала, либо гетеродина. Сигнал с первого выхода переключателя 12 (выход на цепь формирования зондирующего сигнала) через третий умножитель частоты 11, четвертый полосовой фильтр 13, управляемый усилитель 14, ключ, усилитель мощности 16, антенный переключатель 17 поступает на суммирующий порт моноимпульсной антенны 18 и излучается.
С помощью управляемого процессором 24 усилителя 14 обеспечивается регулировка мощности зондирующего сигнала в зависимости от дальности селектируемой цели. Ключ 15 и усилитель мощности 16 включаются на интервале зондирующего импульса 0≤t-nT≤τИ в соответствии с сигналом синхронизатора 7, совместно формируя зондирующий импульс и подавляя сигнал утечки в паузе. Частота зондирующего импульса равна:
fH(t)=NKf2(t), 0≤t-nT≤τИ;
где N- коэффициент умножения частоты в третьем умножителе частоты 11;
K - коэффициент умножения частоты во втором умножителе частоты 5.
Ширина спектра зондирующего сигнала с учетом коэффициентов умножения частоты fM(t) равна
где ΔFM - ширина спектра модуляции сигнала на частоте fM(t), формируемого генератором прямого цифрового синтеза 8.
Сигнал со второго выхода переключателя 12 (выход на цепь формирования гетеродинного сигнала) через четвертый умножитель частоты 23, полосовой фильтр 29, усилитель мощности сигнала гетеродина 28 и делитель мощности 27 поступает на блок балансных смесителей 26 в качестве гетеродинного. Коэффициент умножения частоты в четвертом умножителе частоты 23 равен коэффициенту умножения частоты в третьем умножителе частоты 11, соответственно, частота гетеродина в окне приема равна
fГ(t)=NKf2(t), τИ<t-nT<T.
Отраженный сигнал принимается моноимпульсной антенной 18. Суммарный сигнал с входа-выхода моноимпульсной антенны 18 через антенный переключатель 17 поступает на третий вход блока преселекторов 22, на этот же блок с первого и второго выходов моноимпульсной антенны на одноименные входы поступают разностные азимутальные и угломестные сигналы. Блок преселекторов 22 подавляет сигналы зеркальных частот и пропускает отраженные сигналы через блок малошумящих усилителей 21 на входы блока балансных смесителей 26. В блоке балансных смесителей 26 отраженный сигнал переносится на первую промежуточную частоту:
fПР1=NK[f2(nT)-f2(nT+τR)], τ<τR<T;
где f2(nT)>f2(nT+τR);
fКВ>fПР1.
Далее суммарный и разностные сигналы поступают в блок преобразования частоты 25, где с помощью сигнала на частоте кварца переносятся на вторую промежуточную частоту, усиливаются. Значение второй промежуточной частоты равно:
fПР2=fКВ-fПР1.
Частота fM1, формируемая генератором прямого цифрового синтеза 8 на участке зондирующего сигнала 0≤t-nT≤τИ, выбрана из соотношения
 ,
,
при этом значение второй промежуточной частоты равно fПР2=fM2.
Выходные суммарный и разностные сигналы блока преобразователей частоты 25 переносятся на видеочастоту с помощью блока квадратурных фазовых детекторов 20, на первый и второй вход которого с генератора прямого цифрового синтеза 8 приходит немодулированный квадратурный сигнал с частотой fM2. Выходные квадратурные сигналы блока квадратурных фазовых детекторов 20 оцифровываются в аналого-цифровом преобразователе 19 и поступают в процессор 24.
Процессор 24 обрабатывает оцифрованные суммарный и разностные сигналы путем согласованной фильтрации, вычисления спектра отраженных сигналов в рабочем диапазоне дальностей, порогового обнаружения сигналов целей, вычисления пеленга обнаруженных целей по соотношению амплитуд разностных сигналов к суммарному, выдает измеренные координаты целей потребителю.
В предлагаемой РЛС за счет использования в приемнике второй промежуточной частоты согласуется полоса пропускания приемника со спектром зондирующего сигнала, чем обеспечивается снижение взаимных помех от одновременно работающих РЛС в залпе, повышается чувствительность и помехозащищенность РЛС от взаимных помех, за счет приема суммарных и разностных сигналов без разделения во времени обеспечивается снижение погрешности измерения.
Проведены испытания макета РЛС, подтверждающие повышение помехоустойчивости работы в условиях межканальных помех.
Пользуясь сведениями, представленными в материалах заявки, предлагаемая РЛС может быть изготовлена по существующей известной в радиопромышленности технологии на базе известных комплектующих изделий и использована при измерениях координат целей (дальность, радиальная скорость, пеленг) в условиях межканальных помех.
ЛИТЕРАТУРА
1 Патент США 7002511 "Millimeter wave pulsed radar".
2 В. Манасевич. Синтезаторы частот, теория и проектирование. - М.: Связь, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ МОНОИМПУЛЬСНАЯ РЛС | 2011 |
|
RU2497146C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2006 |
|
RU2315332C1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| СПОСОБ ПОВЫШЕНИЯ ШИРОКОПОЛОСНОСТИ ПРИЕМОПЕРЕДАЮЩЕГО МОДУЛЯ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ, ИСПОЛЬЗУЮЩЕГО ГЕНЕРАЦИЮ СИГНАЛОВ МЕТОДОМ ПРЯМОГО ЦИФРОВОГО СИНТЕЗА, И ВАРИАНТЫ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2392704C1 |
| АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2010 |
|
RU2451373C1 |
| ИМИТАТОР СИГНАЛА РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2012 |
|
RU2522502C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| ЦИФРОВАЯ АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2015 |
|
RU2608637C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ И ОБРАБОТКИ СИГНАЛОВ ДЛЯ РЛС С ЧАСТОТНО-СКАНИРУЮЩЕЙ АНТЕННОЙ РЕШЕТКОЙ | 2008 |
|
RU2365935C1 |
| ЦИФРОВАЯ АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2015 |
|
RU2617457C1 |
Изобретение относится к радиолокационной измерительной технике и может быть использовано в импульсных радиолокационных станциях (РЛС) миллиметрового диапазона. Достигаемый технический результат - повышение помехозащищенности РЛС от взаимных помех и снижение погрешности измерения пеленга цели. Указанный результат достигается за счет использования в приемнике второй промежуточной частоты, приема суммарных и разностных сигналов без разделения во времени. 1 ил.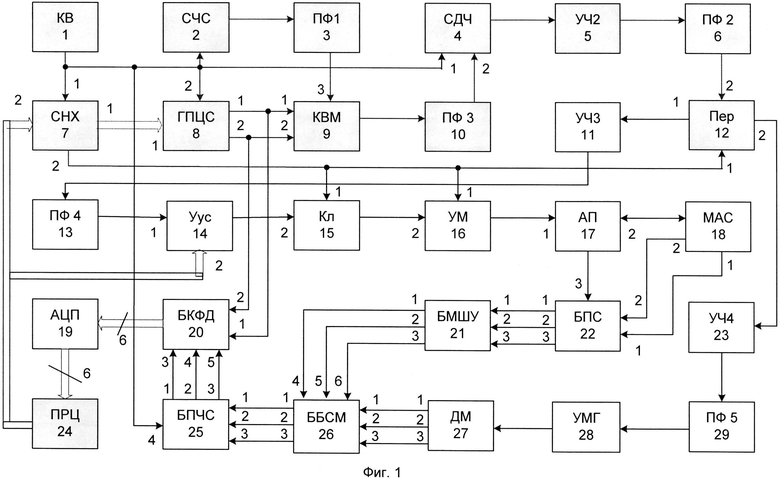
Радиолокационная станция миллиметрового диапазона содержит последовательно соединенные кварцевый генератор, синтезатор частоты смещения, первый полосовой фильтр, квадратурный модулятор и третий полосовой фильтр, генератор прямого цифрового синтеза, первый и второй выходы которого соединены с одноименными входами квадратурного модулятора, последовательно соединенные второй умножитель частоты и второй полосовой фильтр, третий умножитель частоты, последовательно соединенные четвертый полосовой фильтр и управляемый усилитель, ключ, последовательно соединенные усилитель мощности и антенный переключатель, моноимпульсная антенна, вход-выход которой соединен с вторым входом-выходом антенного переключателя, последовательно соединенные аналого-цифровой преобразователь (АЦП) и процессор, процессор обрабатывает оцифрованный отраженный сигнал путем согласованной фильтрации, вычисления спектра, порогового обнаружения сигналов цели, измерения дальности, радиальной скорости и пеленга цели, отличается тем, что вводится блок сдвига частоты, синхронизатор, последовательно соединенные через три однонаправленные связи блок преселекторов, блок малошумящих усилителей, блок балансных смесителей, блок преобразователей частоты и блок квадратурных фазовых детекторов, последовательно соединенные переключатель, четвертый умножитель частоты, пятый полосовой фильтр, усилитель мощности сигнала гетеродина, делитель мощности, первый, второй и третий выходы которого соединены с одноименными входами блока балансных смесителей, при этом выход кварцевого генератора соединен с первым входом синхронизатора, четвертым входом блока балансных смесителей и первым входом блока сдвига частоты, выход третьего полосового фильтра через блок сдвига частоты соединен с входом второго умножителя частоты, выход процессора соединен с вторыми входами синхронизатора и управляемого усилителя, первый выход синхронизатора соединен с одноименным входом генератора прямого цифрового синтеза, выход управляемого усилителя через ключ соединен с вторым входом усилителя мощности, выход второго полосового фильтра через последовательно соединенные переключатель и третий умножитель частоты соединен с входом четвертого полосового фильтра, второй выход синхронизатора соединен с первыми входами ключа, усилителя мощности и переключателя, первый и второй выходы генератора прямого цифрового синтеза соединены с одноименными входами блока квадратурных фазовых детекторов, шесть выходов которого соединены с одноименными входами АЦП, первый и второй выходы моноимпульсной антенны соединены с одноименными входами блока преселекторов, выход антенного переключателя соединен с третьим входом блока преселекторов, процессор управляет управляемым усилителем, через синхронизатор управляет генератором прямого цифрового синтеза, ключом, усилителем мощности и переключателем.
| US 7002511 B1, 21.02.2006 | |||
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| Транспортерно-роторный соломотряс | 1957 |
|
SU113589A1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| JP 2005181237 A, 07.07.2005 | |||
| US 20020164960 A1, 07.11.2002 | |||
| WO 1999066596 A1, 23.12.1999. | |||

