О
ы
Изобретение относится к измерительной технике, а именно к системам технического зрения, и может быть использовано в роботизированном производстве. Целью изобретения является повышение информативности способа за счет возможности определения рельефа объектов сложной формы. В способе определения рельефа объекта, перемещаемого по конвейеру, формируют периодическую световую структуру и проецируют ее на поверхность объекта, наблюдают ее в направлении, перпендикулярном плоскости конвейера, и формируют оптическое изображение этой структуры, преобразуют оптическое излучение в электрические заряды и затем в электрический видеосигнал, по которому определяют положение плоскости сечения рельефа поверхности. При проецировании периодической структуры направление ее линий (решетки) ориентируют перпендикулярно направлению перемещения конвейера. При формировании оптического изображения модулируют его периодической структурой, которая соответствует проецируемой, а при преобразовании оптического излучения в электрический видеосигнал накапливаемые электрические заряды перемещают в направлении перемещения оптического изображения при движении конвейера, причем скорость этого перемещения зарядов согласуют со скоростью перемещения конвейера. 1 ил.
Изобретение относится к области систем технического зрения для конвейеров, может быть использовано в роботизированном производстве.
Цель - повышение информативности способа.
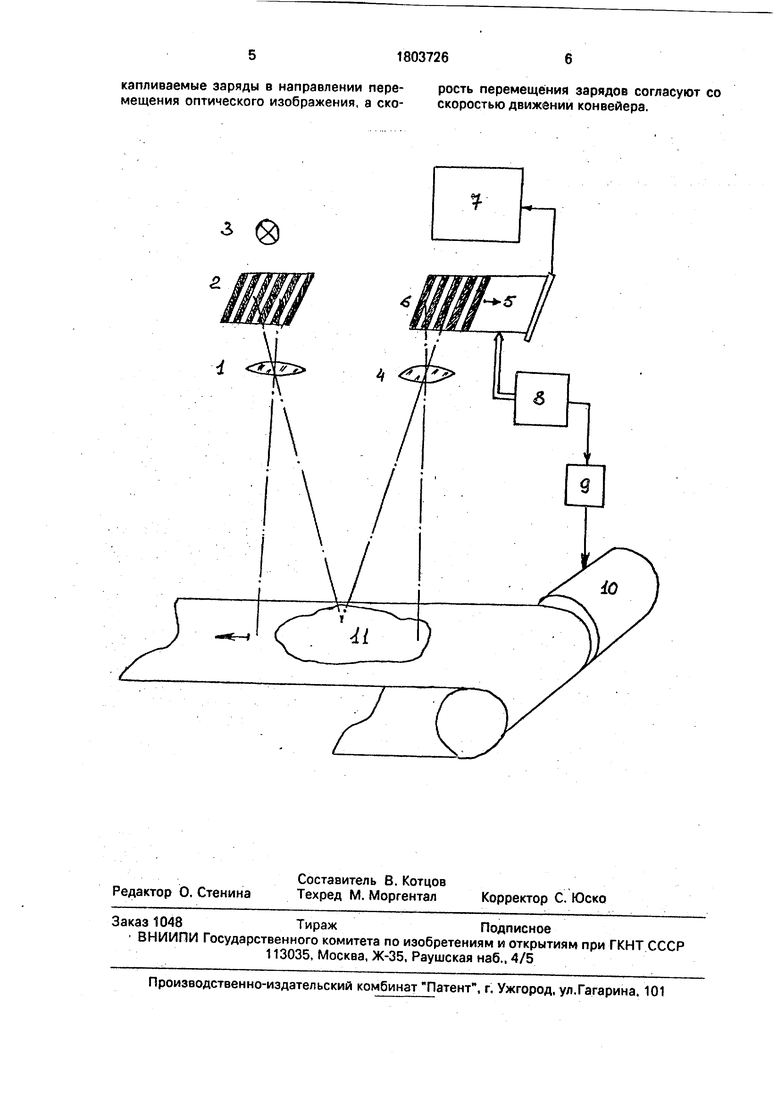
На чертеже изображена схема, реализующая предлагаемый способ.
На чертеже приняты следующие обозначения: 1 - объектив, 2 - решетка, 3 - источник излучения, которые составляют
проецирующую систему. 4 - объектив, 5 - ФПЗС, 6- модулирующая решетка, 7 - ВКЦ или анализирующее устройство, 8 - генератор управляющих напряжений (ГУН), 9 - блок управления приводом конвейера, 10- привод транспортера конвейера, 11 - объект. Объективы 1 и 4 разнесены на базисное расстояние вдоль направления перемещения конвейера 10, а их оптические оси ориентированы перпендикулярно плоскости транспортера. Модулирующие решетки 2 и.
ю о
6 размещены в фокальной плоскости объективов 1 и 4, выполнены с соответствующими периодами и ориентированы направлением линий перпендикулярно направлению перемещения конвейера 10. Плоскость решетки 6 совмещена с фотоприемной плоскостью ФПЗС 5, а ее элементы и выходной регистр ФПЗС 5 ориентированы вдоль направления линий решетки 6. Выходной регистр ФПЗС 5 подключен к входу анализирующего устройства или ВКЦ 7. Управляющие фазные входы ФПЗС 5 подключены к соответствующим выходам ГУН 8, тактовый выход которого связан с входом блока управления приводом 9, выход которого подключен к приводу транспортера конвейера 10.
ГУН 8 может быть любой известной конструкции, который обеспечивает работу ФПЗС в режиме ВЗН (накоплек;:© с задержкой).
Способ осуществляют следующим образом.
Объектив 1 формирует пучок излучения от источника 3, который промодулирован решеткой 2 и создает изображение периодических линий на поверхности объекта 11 перемещаемого конвейером. Направление этих линий ориентируют перпендикулярно направлению перемещения разворотом решетки 2. Причем объектив 1 . проецирует световой пучок в направлении перпендикулярном плоскости транспортера конвейера, а объектив 4 принимает излучение в направлении перпендикулярном той же плоскости и формирует оптическое изображение в своей фокальной плоскости, которое модулируется решеткой 6 .развернутой параллельно решетке 2. Непосредственно размещенный за решеткой 6 матричный фотоприемник 5 преобразует оптическое излучение в электрические заряды накапливаемые на элементах матриц ФПЗС 5.
Генератор управляющих напряжений (ГУН) 8 формирует фазные управляющие напряжения для перемещения зарядов и формирования видеосигнала на выходе в соответствии с тактовыми импульсами. Те же тактовые импульсы с ГУН 8 поступают на вход блока управления приводом конвейера 9 и синхронизируют скорость перемещения транспортера конвейера с работой ФПЗС5. Организация работы и структура ГУН известны и описаны, например, в кн. (Системы технического зрения под ред. А.Н.Писарев- ского, А.Ф.Черневского, Ленинград, Машиностроение, 1988, с. 89). ФПЗС 5 работает в режиме ВЗН, который отличается тем, что в процессе накопления заряды перемещают
соответствующими фазными управляющими импульсами. Скорость перемещения этих зарядов согласуют со скоростью и направлением перемещения оптического изображения объекта 11, сформированного объективом, то есть со скоростью перемещения конвейера в масштабе проекции объектива. Получаемое за время накопления заряда изображение выводят в виде электрического видеосигнала из выходного регистра ФПЗС и подают в вход ВКЦ 7. На экране ВКЦ наблюдают изображение по- аерхности объекта 11 промодулированное следом сечений плоскостями параллельны ми плоскости транспортера конвейера.
Предложенный способ позволяет повысить информативность получаемой видеоинформации о рельефе. Он позволяет анализировать объекты с более сложной мовер.хностью за счет приближения условий наблюдения к условиям освещения,
Способ позволяет получать непосредственное мзооражение изолиний следов плоскостей сечения перпендикулярных оп. TM SCW С-гм и параллельных плоскости транспортзра конвейера, что не требует дополнительной обработки изображений для выявления этих изолиний, упрощает распознавание по сравнению с аналогичными
известными способами, повышает быстродействие устройства.
Способ мо чет быть использован для
контроля отливок литейного производства,
.контроль кгчегтва штампованных изделий,
контроля точности обработки поверхностей, определений объемов и других областях.
Формула изобретения
Способ определения рельефа объекта, перемещаемого конвейером, заключающийся в том, что проецируют на объект периодическую световую структуру, наблюдают ее в направлении, перпендикулярном
плоскости перемещения конвейера, формируют оптическое изображение, преобразуют его в распределение зарядов и затем в электрический видеосигнал, по которому определяют положение сечений рельефа
объекта, отличающийся тем, что, с целью повышения информативности способа, при проецировании периодической структуры ориентируют направление ее линий перпендикулярно направлению перемещения конвейера, при формировании оптического изображения модулируют его периодической световой структурой, соответствующей проецируемой структуре по частоте и ориентации, при преобразовании оптического изображения перемещают накапливаемые заряды в направлении пере- рость перемещения зарядов согласуют со мещения оптического изображения, а ско- скоростью движении конвейера.
| Техническое зрение роботов | |||
| / Под редакцией Якушенкова Ю.Г | |||
| - М.: Машиностроение | |||
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
| Коловратный насос с кольцевым поршнем, перемещаемым эксцентриком | 1921 |
|
SU239A1 |
| Устройство формирования видеоинформации для контроля рельефа деталей | 1988 |
|
SU1627405A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
