Изобретение относится к приборостроению и может использоваться в высокоточных устройствах регистрации перемещений. .
Цель изобретения - увеличение диапазона регистрируемых перемещений и повышение точности измерений,
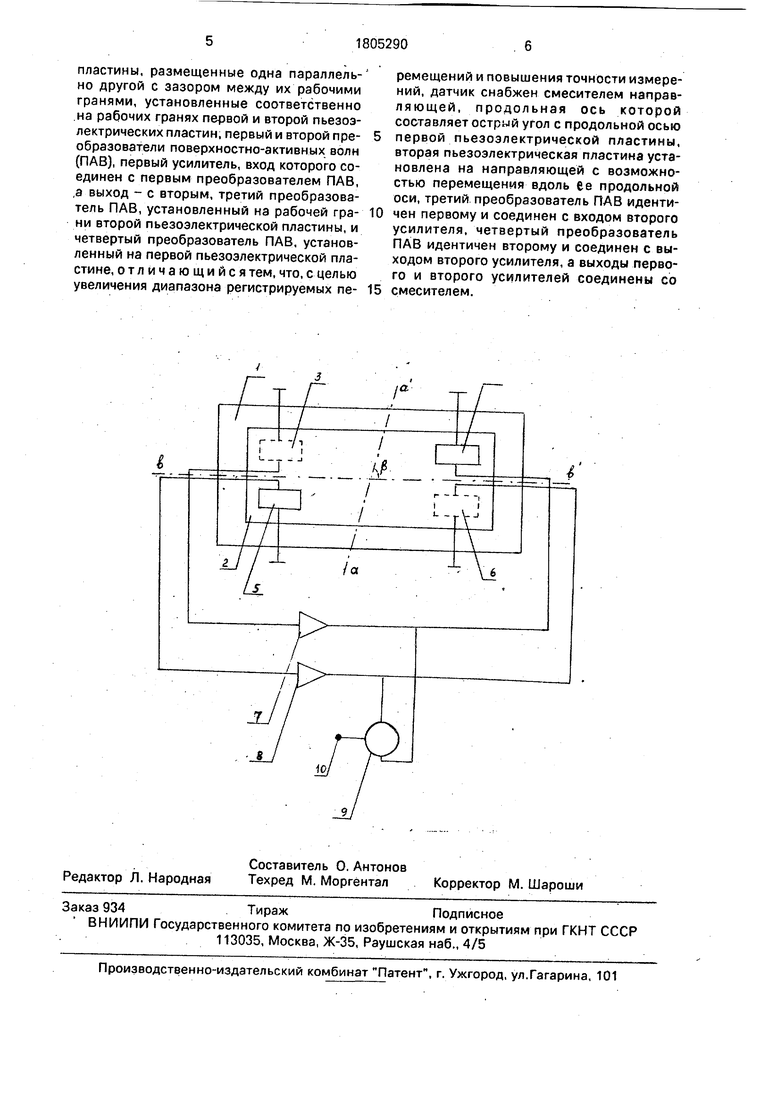
На чертеже показана структурная схема датчика перемещений.
Он содержит первую 1 и вторую 2 пьезоэлектрические подложки. Вторая пьезоэлектрическая подложка - 2 жестко закреплена на направляющем элементе (на чертеже не показан). Пьезоэлектрические подложки 1 и 2 размещены одна относительно другой параллельно с зазором между их рабочими гранями с возможностью перемещения второй пьезоэлектрической подложки 2 относительно первой 1 в плоскости, параллельной их рабочим граням, (вдоль направляющего элемента).
При этом продольные оси первой 1 и второй 2 пьезоэлектрических, подложек (оси, вдоль которых распространяются ПАВ) взаимопараллельны.
На рабочих гранях пьезоподложек 1 и 2 расположены первый 3 и второй 4 преобразователи ПАВ соответственно. На рабочих гранях пьезоподложек 1 и 2 соответственно расположены также третий преобразователь ПАВ (5) идентичный первому преобразователю ПАВ (3) и четвертый преобразователь ПАВ 6, идентичный второму преобразователю ПАВ 4. Третий 5 и четвертый 6 преобразователи ПАВ расположены симметрично первому 3 и второму 4 преобразователям ПАВ соответственно относительно продольной оси первой пьезоподложки. Преобразователи ПАВ (3, 4, 5, 6) могут быть выполнены, например, в виде встречно-штыревых пленочных структур. Один из выходов каждого преоб-с разователя ПАВ (3,4,5, 6) соединен с общей
ел
с
00
о
СП
ю чэ о
шиной (на чертеже не показана). Датчик содержит также основной 7 и дополнительный 8 усилители и смеситель 9. Потенциальный вывод первого преобразователя ПАВ 3 соединен с входом основного усилителя 7. Потенциальный вывод второго преобразователя ПАВ 4 соединен с выходом основного усилителя 7. Потенциальный вывод третьего преобразователя ПАВ 5 соединен с входом дополнительного усилителя 8. Потенциальный вывод четвертого преобразователя ПАВ 6 соединен с выходом дополнительного усилителя 8. Выходы обоих усилителей 7, 8 соединены с соответствующими входами смесителя 9, выход которого соединен с потенциальной выходной клем-. мой датчика перемещения 10. Угол между продольной осью а-а направляющего элемента, т.е. между направлением перемещения второй пьезоподложки 2 и продольной осью первой пьезоэлектрической подложки 1 выбирается из условия:
Пьезоэлектрические подложки могут быть выполнены из любого пьезоэлектрического материала, например, ниобата лития, пьезокерамики и др. Направляющий элемент может быть выполнен, например, в виде профильной диэлектрической или металлической полоски, перемещаемой в пазу плоского основания. Усилители 7, 8 могут быть выполнены, например, в гибридно- пленочном или твердотельном исполнении.
Датчик перемещения работает следующим образом. При включении питающего напряжения возбуждаются два ПАВ-генератора. Первый состоит из акустической линии задержки на основе первого преобразователя ПАВ (3), второго преобразователя ПАВ (4) и основного усилителя 7. Второй ПАВ-генератор состоит из акустической линии задержки на основе третьего преобразователя ПАВ (5), четвертого преобразователя ПАВ (6) и дополнительного усилителя 8; В начальном положении (что соответствует рисунку) частоты обоих ПАВ-генераторов равны f0, угол Р отличен .от л /2; при перемещении пьезоэлектрической подложки 2 вдоль направляющей на расстояние A L преобразователи ПАВ (4 и 5) получат вертикальное смещение (вдоль апертур) A Lsln ft и горизонтальное смещение (вдоль линии в-в ) + A Lcos /3 и - A Lcos / соответственно, где A L - величина перемещения второй пьезоэлектрической подложки относительно первой вдоль продольной оси направляющего элемента.
Изменение фазы в петлеобразной связи каждого ПАВ-генератора определяется только горизонтальным смещением, а при
одномодовом режиме монотонное изменение частоты (без скачка на следующую моду) происходит при смещении в горизонтальном направлении до величины . Ао/2. АО длина ПАВ, При этом смещение вдоль оси направляющего элемента (рабочее, полезное смещение) определяется из выражения ALcos/3 АО/2, т.е. А Ао/2созД
Очевидно, генерация происходит лишь
при перекрытии апертур преобразователей ПАВ каждой из акустических линий задержки. Это условие налагает ограничение на величину перемещения ALsin ,
где W - величина апертуры преобразователей (м).
Из приведенных выше условий и геометрических построений видно, что для
обеспечения измерения максимального ne
ремещения при условии монотонного изменения частоты угол / должен выбираться из условия
arccos r y3 |
при этом 0 ALsin / W.
В датчике при смещении второй подложки 2 относительно первой 1 смещение в горизонтальном направлении для двух акустических каналов имеет разные знаки, а именно ± A Lcos /3 , а по- скольку регистрируемой величиной является разность приращения частоты в двух ПАВ-генераторах, то чувствительность датчика удваивается. Так, если для первого ПАВ-генератора
Afl + ALcos/3-foi
LO
где Lo - начальное расстояние между центрами преобразователей, для второго ПАВ- генератора
Af2 -A -cos/3-f0.
Приращение частоты на выходе смеси50
теля
Af Afi-Af2 2 ALcosl fo.
LO
По приращению частоты определяют измеряемое перемещение.
Формула изобретения Датчик перемещений, содержащий первую и-предназначенную для взаимодействия с объектом вторую пьезоэлектрические
пластины, размещенные одна параллельно другой с зазором между их рабочими гранями, установленные соответственно .на рабочих гранях первой и второй пьезоэлектрических пластин, первый и второй преобразователи поверхностно-активных волн (ПАВ), первый усилитель, вход которого соединен с первым преобразователем ПАВ, ,а выход - с вторым, третий преобразователь ПАВ, установленный на рабочей грани второй пьезоэлектрической пластины, и четвертый преобразователь ПАВ, установленный на первой пьезоэлектрической пластине, отличающийся тем, что, с целью увеличения диапазона регистрируемых перемещений и повышения точности измерений, датчик снабжен смесителем направляющей, продольная ось которой составляет острый угол с продольной осью
первой пьезоэлектрической пластины, вторая пьезоэлектрическая пластина установлена на направляющей с возможностью перемещения вдоль ее продольной оси, третий преобразователь ПАВ идентичен первому и соединен с входом второго усилителя, четвертый преобразователь ПАВ идентичен второму и соединен с выходом второго усилителя, а выходы первого и второго усилителей соединены со
смесителем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик скорости перемещений | 1991 |
|
SU1818679A1 |
| Устройство для измерения угла наклона | 1980 |
|
SU954822A1 |
| Линия задержки на поверхностных акустических волнах | 1979 |
|
SU860283A1 |
| Генератор на преобразователях на поверхностных акустических волнах | 1990 |
|
SU1764132A1 |
| Дифференциальный термодатчик | 1988 |
|
SU1636700A1 |
| Фокусирующий преобразователь поверхностных акустических волн | 1983 |
|
SU1131026A2 |
| ИМПЕДАНСНЫЙ РЕЖЕКТОРНЫЙ ФИЛЬТР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2003 |
|
RU2252481C2 |
| Датчик давления | 1987 |
|
SU1506310A1 |
| Фильтр на поверхностных акустических волнах | 1979 |
|
SU945951A1 |
| Устройство на поверхностных акустических волнах | 1991 |
|
SU1828565A3 |
Изобретение относится к приборостроению и может быть использовано в высокочастотных устройствах регистрации перемещений. Цель изобретения - увеличение диапазона регистрируемых перемещений и точности измерений. Это достигается за счет применения новой схемы соединения четырех попарно идентичных преобразователей поверхностно-активных волн со смесителем и дополнительным усилителем. Датчик позволяет плавно измерять перемещения в широком диапазоне. 1 ил.
| Малое В.В | |||
| Пьезоэлектрические датчики | |||
| М.: Энергоатомиздат, 1989, с | |||
| Прибор для измерения угла наклона | 1921 |
|
SU253A1 |
| Устройство для измерения линейных перемещений | 1986 |
|
SU1317278A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
