Изобретение относится к приборостроению и может использоваться в высокоточных устройствах регистрации скорости перемещений, например, в высокоточных тахометрах.
Цель изобретения - повышение точности измерения скорости перемещений.
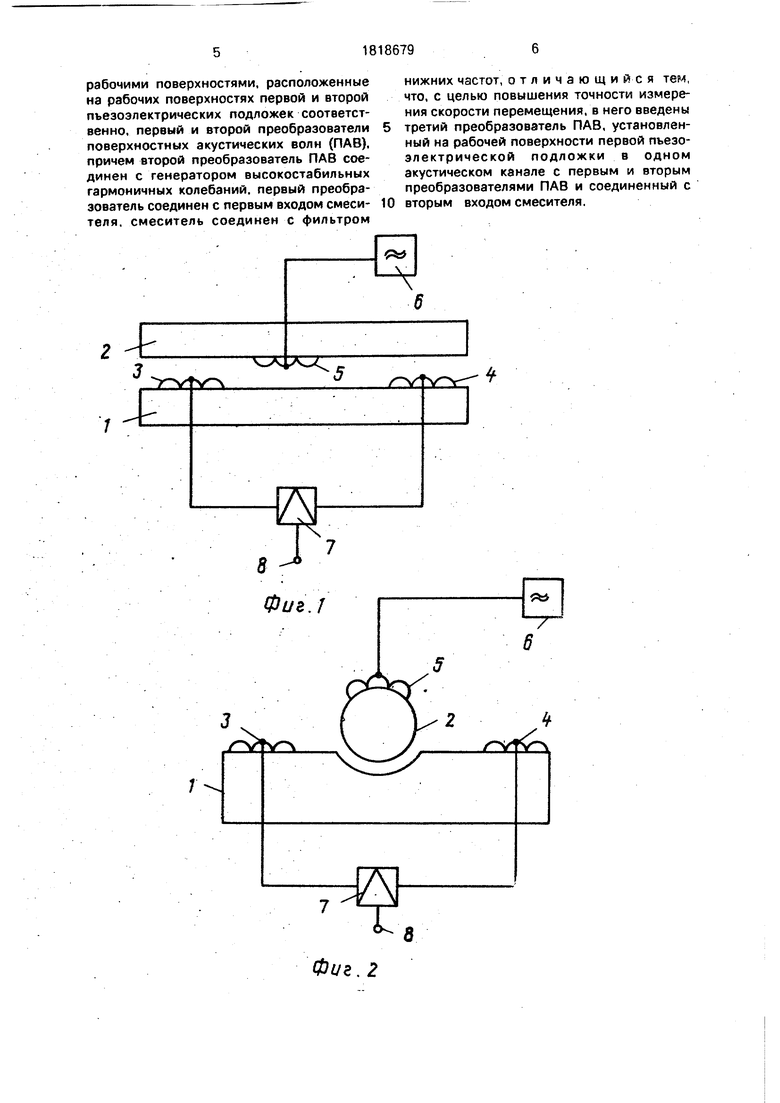
На фиг. 1 и 2 показаны структурные схемы датчиков скорости перемещений, причем датчик, показанный на фиг. 2, предназначен для измерения скорости вращения.
Датчики содержат первую 1 и вторую 2 пьезоэлектрические подложки. Вторая пьезоэлектрическая подложка 2 жестко закреплена на направляющем элементе.
Пьезоэлектрические подложки 1 и 2 размещены одна относительно другой с зазором между рабочими поверхностями с возможностью перемещения второй пъезоподлож- ки относительно первой без изменения величины зазора вдоль направляющего элемента, как показано на фиг. 1, или вокруг направляющего элемента (оси), как показано на фиг. 2. На рабочих поверхностях пье- зоподложек 1 и 2 первый и третий расположены преобразователи (ПАВ) 3, 4 и второй преобразователь ПАВ 5 соответственно, причем преобразователи ПАВ 3 и 4 идентичны. Один из выводов каждого преобразователя ПАВ 3-5 соединен с общей шиной. Датчик содержит также высокоста00
со
ON VI Ю
бмльный генератор гармоничных колебаний 6 и смеситель 7, причем потенциальный вывод второго преобразователя 5 соединен с выходом генератора, потенциальные .выводы преобразователей 3 и 4 соединены с входами смесителя, а потенциальная выходная клемма 8 соединена с выходом смесителя.
Направляющий элемент, соответствующий датчику скорости линейного перемеще- нмя (фиг. 1) может быть выполнен, например, а виде профильной диэлектрической или металлической полоски, перемещаемом в пазу плоского основания.
Направляющий элемент, соответствующий датчику скорости углового перемещения (фиг. 2} может быть выполнен в виде металлической или диэлектрической оси, закрепленной в подшипнике.
Пьезоэлектрические подложки могут быть выполнены из любого пьезоэлектрического материала, например, ниобата лития, пьезокерамики и др.
Датчик скорости работает следующим образом. .;, а ,.л
При включении питающего напряжения высокостабильный генератор гармоничных колебаний с частотой fo с помощью преобразователя 5 возбуждает ПАВ частотой fo как на рабочей поверхности пъезоподложки 1, так и на рабочей поверхности пьезопод- ложки 2 через небольшой зазор h А)(Ао- длина ПАВ на частоте акустического синхронизма). Поскольку процесс возбуждения и приема ПАВ через зазор можно описать введением эффективной диэлектрической проницаемости
„-//7 Г4 i .
-(3)
esffXi+thOffl-h);
А 5$Н
Лг7Г - . .fV3 - ™-SIPJ Т 1Т-йЩ&:ЩЗГйЯ
пример, транзистор, работающий в нелинейном режиме) в результате чего на потенциальной выходной клемме появляется гармонический сигнал с разностной частотой 2fo, который отфильтровывается и подвергается дальнейшей обработке.
Работу датчика угловой скорости (фиг. 2) можно рассмотреть аналогичным образом. Эффективная поверхность с размещенными на ней преобразователями в соответствии с рис. 2. показана на рис. 4. при вращении пьезоподложки 2 вокруг оси с угловой скоростью w точки участка эффективной поверхности АВ движутся с линейной скоростью . перпендикулярной .радиусу R, возбуждая в точке В ПАВ с частотой fo + f ив точке В ПАВ с частотой fo - f , где fa fo wR/V . В результате на потенциальных клеммах преобразователей (поз.
з и 4) появляются напряжения Уз Do соз(2я (fo + f3) t + 4); IM Uo - соз(2л: (fo - f ) t + 4) соответственно. Дальнейшая обработка сигналов производится аналогично случаю, рассмотренному выше.
Оценим точность измерения линейной скорости. Пусть линейная скорость рабочих поверхностей относительно друг друга, скорость ПАВ в пъезолодложке Vo + 3Vo, где 5Vo - девиация скорости ПАВ, связанная с
влиянием температуры/давления и других
факторов. Обычно 5Vo/Vo«10 . Согласно приведенным выше соотношениям регистрируемого приращения частоты на выходе смесителя у
Af 2V0+dV0Используя известное соотношение I/O + х) к1 - х, при х« 1 имеем
(1-%)f0
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик перемещений | 1990 |
|
SU1805290A1 |
| Устройство для измерения ускорений | 1985 |
|
SU1408378A1 |
| Датчик давления | 1988 |
|
SU1525508A2 |
| РЕЗОНАТОР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2017 |
|
RU2643501C1 |
| Генератор на преобразователях на поверхностных акустических волнах | 1990 |
|
SU1764132A1 |
| Датчик для измерения парциального давления кислорода | 1983 |
|
SU1191817A1 |
| РЕЗОНАТОР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ С ИСПОЛЬЗОВАНИЕМ ОТРАЖАТЕЛЕЙ В КАЧЕСТВЕ НАГРЕВАТЕЛЬНЫХ ЭЛЕМЕНТОВ | 2012 |
|
RU2491712C1 |
| Дифференциальный термодатчик | 1988 |
|
SU1636700A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ АЭРОЗОЛЕЙ В ГАЗАХ | 1991 |
|
RU2082959C1 |
| АДСОРБЦИОННЫЙ ДАТЧИК ГАЗА | 1994 |
|
RU2084882C1 |

Изобретение относится к приборостроению. Цель изобретения - повышение точности измерения скорости перемещения. Датчик скорости перемещений содержит первую и жестко закрепленную на направляющем элементе вторую пьезоэлектрические подложки, расположенные на рабочих поверхностях первой и второй пьезоэлектрических подложек первый и второй преобразователи ПАВ и генератор высокостабильных гармонических колебаний, соединенный с вторым преобразователем ПАВ. Датчик содержит также на рабочей поверхности первой пьезоэлектрической подложки третий преобразователь ПАВ, находящийся в одном акустическом канале с первым и вторым преобразователями ПАВ, и смеситель, при этом первый и третий преобразователи соединены с входами смесителя, а выход смесителя соединен с потенциальной выходной клеммой. Выполнение датчика обеспечивает высокую точность измерения скорости перемещения различных объектов. 4 ил. fe
то работу датчика скорости можно рассматривать на одной поверхности, считая, что она обладает соответствующей эффективной диэлектрической проницаемостью, зависящей от величины зазора. На фиг. 3 и 4 показана эта эффективная поверхность с размещенными на ней преобразователями ПАВ в соответствии со схемой датчика, показанной на фиг. 1. При движении пъезоподложки 2 (фиг. 1) вправо относительно пьезоподложки 1 со скоростью v в соответствии с эффектом Доплера на потенциальнойклемме преобразователя 4 появляется напряжение вида 1М Do cos(2 я (fo - f) t + +4), а на потенциальной клемме преобразователя 3 - напряжение вида Us Uo cos(2 л (fo - f ) t + 4), где f D fo v/V , где V - скорость ПАВ на пъезоподложке. Далее сигналы U4 и Кз подаются на смеситель (на5
0
или
Af 2v 2V 5V ТГ Vo V0 W Очевидно, что точность определения скорости определяется кратковременной стабильностьюгенератора гармоничных колебаний; Поскольку стабильность таких генераторов может достигать , 109 мкм/с, то предельное разрешение при измерении скорости составляет 103 .мкм/с.
Формула изобретения Датчик скорости перемещений, содер- ,. жащий первую и жестко закрепленную на направляющем элементе вторую пьезоэлектрические подложки, рабочие поверхности которых имеют кривизну, размещенные одна относительно другой с возможностью перемещения с постоянным зазором между
рабочими поверхностями, расположенные на рабочих поверхностях первой и второй пьезоэлектрических подложек соответственно, первый и второй преобразователи поверхностных акустических волн (ПАВ), причем второй преобразователь ПАВ соединен с генератором высокостабильных гармоничных колебаний, первый преобразователь соединен с первым входом смесителя, смеситель соединен с фильтром
8
ZS
т
Фиг. 1
Фи г. 2
нижних частот, отличающийся тем, что, с целью повышения точности измерения скорости перемещения, в него введены третий преобразователь ПАВ, установленный на рабочей поверхности первой пьезоэлектрической подложки в одном акустическом канале с первым и вторым преобразователями ПАВ и соединенный с вторым входом смесителя.
w
Фиг. 3
г
Фи.
/-хХц -у
