Изобретение относится к объемным гидродвигателям, предназначенным для преобразования энергии потока рабочей жидкости в механическую энергию выходного звена, движущегося возвратно-поступательно, и может быть применено в конструкциях гидрофицированных машин в качестве привода их рабочего оборудования.
Целью изобретения является повышение надежности и увеличение ресурса работоспособности гидррцилиндра за счет уменьшения плеча приложения к нему продольного сжимающего усилия.
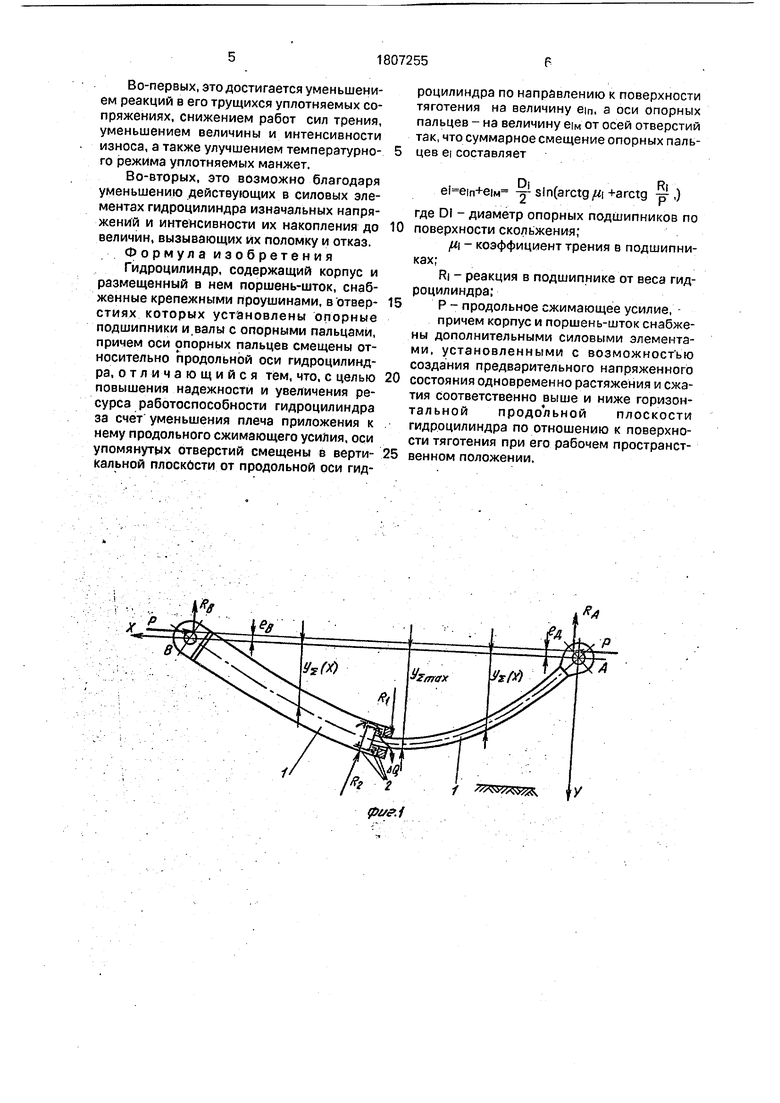
На фиг. 1 представлен общий вид заявляемого гидроцилиндра; на фиг. 2 - принцип работы устройства.
Заявляемый гидроцилиндр содержит корпус 1 с элементами 2, 3, 4, 5 крепления, состоящий из передней 6 со сменной на-: правляющей втулки 7 и задней 8 крышек.
снабженных уплотнителями 9 и элементами крепления на корпусе 1, и шток 10 с закрепленными на нем поршнем 11с уплотнителями 12 и элементами 13,14,15,16 крепления гидроцилиндра. При этом элементы 2, 3, А, 5 и 13,14,15,16 крепления гидроцилиндра представляют собой проушины 2, 13 со вставленными в них опорными подшипниками 3-4 и 14-15, как правило, сферическими, наружные кольца 3, 14 которых установлены в проушинах 2, 13, а внутренние 4, 15 запрессованы на валы 5,16 с опорными пальцами. Поверхностью скольжения является поверхность Г.
Элементы 5,16 представляют собой вал с двумя опорными пальцами, выполненными на его боковых торцовых поверхностях таким образом, что оси опорных пальцев смещены в вертикальной плоскости относительно оси вала на величину эксцентриситета е|м, равного
. eim -у sinfarctg -до +arctg -pr)-sin(arctg
ЛЯСами валы 5,16 установлены в подшипниках 3, 4 и 14, 15, расположенных в отверстиях проушин 2, 13, смещенных в свою очередь от продольной оси гидроцилиндра в вертикальной плоскости на величину эксцентриситета em,равного
Dj, ч ein -2-sin(arctg до),
по направлению к поверхности тяготения при его рабочем пространственном расположении. При этом опорные пальцы валов 5, 16 жестко закрепляются на приводимых гидроцилиндром в движение элементах рабочего оборудования гидрофицированных машин.
Таким образом суммарный эксцентриситет ei смещения осей опорных пальцев валов 5, 16 относительно продольной оси гидроцилиндра составляет
(arctg до+arctg - )eiM+ein
по направлению к поверхности тяготения.
Корпус и шток заявляемого гидроцилиндра на всю их длину равномерно по периметру, и симметрично его вертикальной п родол ьной плоскости допол нител ьно снабжены силовыми элементами 17,18 и 19, 20, установленными с возможностью обязательного создания у корпуса и штока предварительного напряженного состояния одновременно растяжения и сжатия соответственно выше (элементы 17, 19) и ниже (элементы 18, 20) горизонтальной продольной плоскости гидроцилиндра по отношению к поверхности тяготения при рабочем его расположении.
Работает заявляемый тидроцилиндр
следующим образом.
Предварительно напряженные силовые элементы17-20, деформируя его длинномерные элементы, как бы, вне поля тяготения, вызывают противополо.жно
направленный прогиб гидроцилиндра, компенсирующий имеющийся у него полный прогиб в поле тяготения, приводя изначально искривленную продольную ось гидроцилиндра к прямой полностью либо частично
при больших габаритно-весовых характеристиках гидроцилиндра.
Далее, благодаря тому, что оси элемен- тов2-5 и 13-16 крепления заявляемого гидроцилиндра смещены в вертикальной
плоскости от его продольной оси по направлению к поверхности тяготения на величину эксцентриситета, линия действия продольного сжимающего усилия совпадает с продольной осью гидроцилиндра, тем самым
снижая на эту величину бывшее плечо приложения сжимающего усилия.
Этим самым образом в заявляемом гидроцилиндре достигается значительное уменьшение плеча приложения к нему продольного сжимающего усилия.
Взаимосогласование величины эксцентриситета и пространственного расположения гидроцилиндра достигается в процессе его работы автоматически.
Так при горизонтальном расположении гидроцилиндра эксцентриситет имеет максимальное значение, равное
40
ei ein+eiM,
а при вертикальном - минимальное, равное величине ein. Текущее значение эксцентриситета определяется изменением эксцентриситета при повороте гидроцилиндра от максимума до нуля. Аналогично изменяется и реакция в опорном подшипнике от веса гидроцилиндра при его повороте на угол р из горизонтального в вертикальное по закону косинуса.
Таким образом у заявляемого гидроцилиндра достигается снижение плеча приложения продольного сжимающего усилия, причем автоматически, независимо от его пространственного расположения в процессе работы.
,. Все это позволяет сделать заключение о повышении надежности и увеличении ре- сурса работоспособности заявляемого гид- роцилиндра.
Во-первых, это достигается уменьшением реакций в его трущихся уплотняемых сопряжениях, снижением работ сил трения, уменьшением величины и интенсивности износа, а также улучшением температурного режима уплотняемых манжет.
Во-вторых, это возможно благодаря уменьшению действующих в силовых элементах гидроцилиндра изначальных напряжений и интенсивности их накопления до величин, вызывающих их поломку и отказ. Формула изобретения Гидроцилиндр, содержащий корпус и размещенный в нем поршень-шток, снабженные крепежными проушинами, в отверстиях которых установлены опорные подшипники и валы с опорными пальцами, причем оси опорных пальцев смещены относительно продольной оси гидроцилиндра, отличающийся тем, что. с целью повышения надежности и увеличения ресурса работоспособности гидроцилиндра за счет уменьшения плеча приложения к нему продольного сжимающего усилия, оси упомянутых отверстий смещены в вертикальной плоскости от продольной оси гидроцилиндра по направлению к поверхности тяготения на величину еш, а оси опорных пальцев - на величину eiM от осей отверстии так, что суммарное смещение опорных пальцев ei составляет
ei ein+eiM у slntarctg/ i+arctg - ,) где Di - диаметр опорных подшипников по поверхности скольжения;
(л - коэффициент трения в подшипниКЭХ
RI - реакция в подшипнике от веса гидроцилиндра;
Р - продольное сжимающее усилие, причем корпус и поршень-шток снабжены дополнительными силовыми элементами, установленными с возможностью создания предварительного напряженного
состояния одновременно растяжения и сжатия соответственно выше и ниже горизонтальной продольной плоскости гидроцилиндра по отношению к поверхности тяготения при его рабочем пространственном положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОЦИЛИНДР | 1994 |
|
RU2072455C1 |
| ГИДРОЦИЛИНДР | 2015 |
|
RU2602024C2 |
| ГИДРОСИСТЕМА | 1992 |
|
RU2046893C1 |
| ГИДРОСИСТЕМА | 1994 |
|
RU2100665C1 |
| Гидроцилиндр | 1989 |
|
SU1807256A1 |
| ГИДРОСИСТЕМА | 1992 |
|
RU2050479C1 |
| ШТОК ГИДРОЦИЛИНДРА | 1995 |
|
RU2133395C1 |
| ВИНТОВОЙ ГИДРОЦИЛИНДР | 2015 |
|
RU2698226C2 |
| ГИДРОСИСТЕМА | 2011 |
|
RU2471091C1 |
| ШТОК ГИДРОЦИЛИНДРА | 2000 |
|
RU2181452C2 |

Изобретение относится к объемным гидродвигателям., предназначенным для преобразования энергии потока рабочей жидкости в механическую энергию выходного звена, движущегося возвратно-поступательно, и может быть применено в конструкциях гидрофицированных машин в качестве привода их рабочего оборудования. Целью изобретения является повышение надежности и увеличение ресурса работоспособности гидроцилиндра за счет уменьшения плеча приложения к нему продольного сжимающего усилия. Сущность изобретения заключается в том/что у гидроцилиндра, содержащего корпус и размещекный в нем поршень-шток, снабженные крепежными проушинами с отверстиями, оси которых смещены в вертикальной плоскости от продольной оси гидроцилиндра по направлению к поверхности тяготения на величину ein, а оси установленных в отверстиях опорных пальцев - на величину eiM от осей отверстий так, что суммарное смещение осей опорных пальцев ei составляет erein+eiM -Ј sin(arctg p +arctg -), где DI -диаметр опорных подшипников по поверхности скольжения; /щ - коэффициент трения в подшипниках; RJ - реакция в подшипнике от веса гидроцилиндра; Р - продольное сжимающее усилие. При этом корпус и поршень-шток снабжены дополнительными силовыми элементами, установленными с возможностью создания предварительного напряженного состояния, одновременно растяжения и сжатия соответственно выше и ниже горизонтальной продольной плоскости гидроцилиндра по отношению к поверхносУи тяготения при его рабочем пространственном положении. 2 ил. (Л 00 о XI ю ел ел
| Ковш скрепера | 1981 |
|
SU1059077A1 |
