Изобретение относится к объемному гидроприводу возвратно-поступательного действия, предназначенному для преобразования энергии потока рабочей жидкости в механическую энергию выходного звена, движущегося возвратно-поступательно и работающего в условиях значительных нагрузок на исполнительном (основном силовом) гидроцилиндре, и может использоваться в области гидроавтоматики.
Известна гидросистема, содержащая силовой гидроцилиндр, два вспомогательных гидроцилиндра, электрогидравлический преобразователь, усилитель, дросселирующий распределитель, электромагнитную муфту, чувствительные элементы: осевого перемещения штоков вспомогательных гидроцилиндров и угловой несоосности штока и корпуса силового гидроцилиндра (авт.св. СССР №1735620, МКИ F15B 15/04).
Недостатком известного аналога является то, что в случае значительного типоразмера гидроцилиндра (повышенные диаметр и ход штока) неизбежны большие начальные технологические отклонения штока от прямолинейности и эксцентриситеты приложения развиваемого гидроцилиндром продольного толкающего усилия. В этих условиях приведение гидроцилиндра в состояние продольной устойчивости чрезвычайно затруднено, что требует непрерывного контроля его работоспособности и управления надежностью в процессе эксплуатации с целью упреждения ожидаемого отказа и предупреждения случайного.
Наиболее близкой по технической сущности к изобретению является гидросистема, содержащая силовой гидроцилиндр, полости которого гидромагистралями через гидрораспределитель подключены к источнику питания и сливу, предохранительный клапан и манометр, а также чувствительные элементы осевого перемещения штока и угловой несоосности длинномерных элементов гидроцилиндра, подсоединенные к электрическим усилителю и преобразователю, поршневая полость гидроцилиндра соединена с гидрораспределителем через манометр и двухпозиционный гидрозолотник с электромагнитным управлением, соединенным с преобразователем, манометр выполнен электрическим, электросхема которого подключена к усилителю, чувствительный элемент осевого перемещения штока установлен на корпусе силового гидроцилиндра, а преобразователь соединен с индикатором (патент РФ №2100665, МКИ F15B 11/00).
Однако в большинстве гидросистем возвратно-поступательного действия зачастую имеют место значительные пространственные перемещения исполнительного гидроцилиндра, например, вместе с рабочим оборудованием одноковшовых экскаваторов. В этом случае характеристики несущей способности гидроцилиндра, сформировавшиеся в преобразователе от сигналов с чувствительных элементов осевого перемещения штока, его угловой несоосности и давления жидкости в поршневой полости гидроцилиндра, будут существенно различаться в зависимости от того, какое пространственное расположение в текущий момент занимает гидроцилиндр по отношению к поверхности тяготения: горизонтальное (наибольшее нагружение) или более предпочтительное вертикальное (менее нагруженное). Результатом этого является снижение диагноза о состоянии несущей способности гидроцилиндра. Так, для вертикально работающих гидроцилиндров возможна диагностическая ошибка I-го рода - «ложная тревога» с направлением в ремонт гидроцилиндра, недоиспользовавшего свой ресурс. А для горизонтально расположенного - II-го рода - «пропуск цели», следствием которой, как правило, является полный, явный, зачастую невосстанавливаемый отказ гидроцилиндра.
Технический результат - повышение надежности гидросистем возвратно-поступательного перемещения путем непрерывного эксплуатационного контроля нагруженности силового (исполнительного) гидроцилиндра посредством комплексной оценки его несущей способности по деформированному состоянию силового гидроцилиндра и действующим на него нагрузкам с учетом пространственного положения гидроцилиндра.
Технический результат достигается тем, что в гидросистеме, содержащей силовой гидроцилиндр, полости которого гидромагистралями через гидрораспределитель подключены к источнику питания, снабженному предохранительным клапаном, и сливу, электрический манометр, а также чувствительные элементы осевого перемещения штока и угловой несоосности штока силового гидроцилиндра, закрепленные на его корпусе и подсоединенные к электрическим усилителю и преобразователю, поршневая полость гидроцилиндра соединена с гидрораспределителем через электрический манометр и двухпозиционный гидрозолотник с электромагнитным управлением, соединенными с преобразователем, подключенным к индикатору, на корпусе силового гидроцилиндра дополнительно установлен датчик пространственного положения, подсоединенный через усилитель к преобразователю.
На рис.1 представлена заявляемая гидросистема. Заявляемая гидросистема состоит из силового гидроцилиндра 1, полости которого через гидрораспределитель 2 подключены к источнику питания 3 и сливу 4. Источник питания 3 защищен от перегрузки предохранительным клапаном 5. Поршневая полость силового гидроцилиндра 1 соединена с гидрораспределителем 2 через электрический манометр 6 и двухпозиционный гидрозолотник 7 с электромагнитным управлением. Элементы гидросистемы соединены гидромагистралями 8. Чувствительные элементы осевого перемещения штока 9 и угловой несоосности штока 10 закреплены на корпусе гидроцилиндра 1 и подключены к усилителю 11, соединенному с электропреобразователем 12, который связан с двухпозиционным гидрозолотником 7 и индикатором 13 электромагистралями 14. Гидросистема дополнительно снабжена датчиком 15 пространственного положения силового гидроцилиндра 1, расположенным на его корпусе и соединенным электромагистралями 14 с усилителем 11 и электропреобразователем 12, подключенным к индикатору 13 и двухпозиционному гидрозолотнику 7 с электромагнитным управлением.
Заявляемая гидросистема работает следующим образом.
В среднем положении золотника гидрораспределителя 2 рабочая жидкость от источника питания 3 поступает через предохранительный клапан 5 по гидромагистрали 8 на слив 4. Однако, если в этом случае на силовой гидроцилиндр действует нагрузка (случай нагружения гидроцилиндра ковша экскаватора при копании рукоятью), сигналы с электрического манометра 6, а также чувствительных элементов осевого перемещения штока 9 через нулевую точку зафиксировавшего начальное положение штока, угловой несоосности штока 10 и датчика пространственного положения 15 поступают на усилитель 11 и далее на электропреобразователь 12, где формируются и сравниваются с предельным значением. В случае критического нагружения управляющий электросигнал поступает с электропреобразователя 12 на двухпозиционный гидрозолотник 7, переводя его в позицию соединения силового гидроцилиндра 1 и источника питания 3 со сливом 4, тем самым разгружая эти элементы и предотвращая отказ. В случае удовлетворительной несущей способности силового гидроцилиндра 1 сигнал с электропреобразователя 12 поступает на индикатор 13, по которому можно прогнозировать наступление отказа с целью его предотвращения.
В крайнем правом положении золотника гидрораспределителя 2 рабочая жидкость от источника питания 3 поступает через гидрораспределитель 2, электрический манометр 6 и двухпозиционный гидрозолотник 7 с электромагнитным управлением в поршневую полость силового гидроцилиндра 1, выдвигая шток и нагружая его сжимающим усилием. В случае критических нагрузок двухпозиционный гидрозолотник 7 с электромагнитным управлением, управляемый электропреобразователем 12 согласно показаниям электрического манометра 6, чувствительных элементов осевого перемещения штока 9 и угловой несоосности штока 10, а также датчика 15 пространственного положения нагруженной гидромагистрали 8 соединяет силовой гидроцилиндр 1 и источник питания 3 со сливом 4, тем самым сбрасывая давление в гидросистеме и разгружая силовой гидроцилиндр 1 и источник питания 3. Одновременно скачкообразное превышение допустимых нагрузок фиксируется на индикаторе 13, частота которых дополнительно свидетельствует о близости отказа для данных эксплуатационных условий.
В крайнем левом положении золотника гидрораспределителя 2 рабочая жидкость от источника питания 3 поступает в штоковую полость силового гидроцилиндра 1, нагружая его растягивающим продольным усилием. В этом случае шток совершает неосновной насосный ход. Давление в поршневой полости силового гидроцилиндра 1 минимально, так как она уже соединена через гидрораспределитель 2 со сливом 4. То же следует сказать о деформациях и нагруженности силового гидроцилиндра 1, что регистрируется индикатором 13.
Таким образом, сигналы с чувствительных элементов осевого перемещения и угловой несоосности, характеризующие деформационную составляющую несущей способности силового гидроцилиндра, наряду с сигналами от электрического манометра и датчика пространственного положения гидроцилиндра, характеризующими ее нагрузочную составляющую продольной и поперечной нагрузками соответственно, поступают на усилитель и затем на преобразователь, где окончательно формируются в качестве характеристики несущей способности силового гидроцилиндра и далее сравниваются с ее предельным значением. В случае непревышения предельного значения электрический сигнал поступает на индикатор оператора машины, например, в виде соотношения текущего и предельного значений. В противном случае управляющий сигнал с преобразователя поступает на двухпозиционный гидрозолотник, который отключает силовой гидроцилиндр от гидросистемы, тем самым предотвращая его отказ, повышая надежность силового гидроцилиндра и гидросистемы в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОСИСТЕМА | 1994 |
|
RU2100665C1 |
| Гидросистема | 1990 |
|
SU1735620A1 |
| Гидросистема рабочего оборудования погрузчика | 1980 |
|
SU989004A1 |
| Машина для вскрытия кюветов от снега | 1988 |
|
SU1602955A1 |
| Гидропривод бульдозера | 1982 |
|
SU1155685A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2003 |
|
RU2246615C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗАХВАТНО-СРЕЗАЮЩИМ УСТРОЙСТВОМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ | 2013 |
|
RU2529156C2 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ГУСЕНИЧНОМ ХОДУ | 2013 |
|
RU2531425C2 |
| Насосная станция механизированных крепей | 1988 |
|
SU1583624A1 |
| Гидросистема управления рабочими органами шпалоподбивочного устройства | 1990 |
|
SU1802026A1 |
Гидросистема предназначена для преобразования энергии потока рабочей жидкости в механическую энергию выходного звена, движущегося возвратно-поступательно и работающего в условиях значительных нагрузок на исполнительном (основном, силовом) гидроцилиндре и может использоваться в области гидроавтоматики. Гидросистема содержит силовой гидроцилиндр, полости которого гидромагистралями через гидрораспределитель подключены к источнику питания, снабженному предохранительным клапаном, и сливу, электрический манометр, а также чувствительные элементы осевого перемещения штока и угловой несоосности штока силового гидроцилиндра, закрепленные на его корпусе и подсоединенные к электрическим усилителю и преобразователю, поршневая полость силового гидроцилиндра соединена с гидрораспределителем через электрический манометр и двухпозиционный гидрозолотник с электромагнитным управлением, соединенные с преобразователем, подключенным к индикатору, на корпусе силового гидроцилиндра дополнительно установлен датчик пространственного положения, подсоединенный через усилитель к преобразователю. Технический результат - повышение надежности гидросистемы возвратно-поступательного перемещения. 1 ил.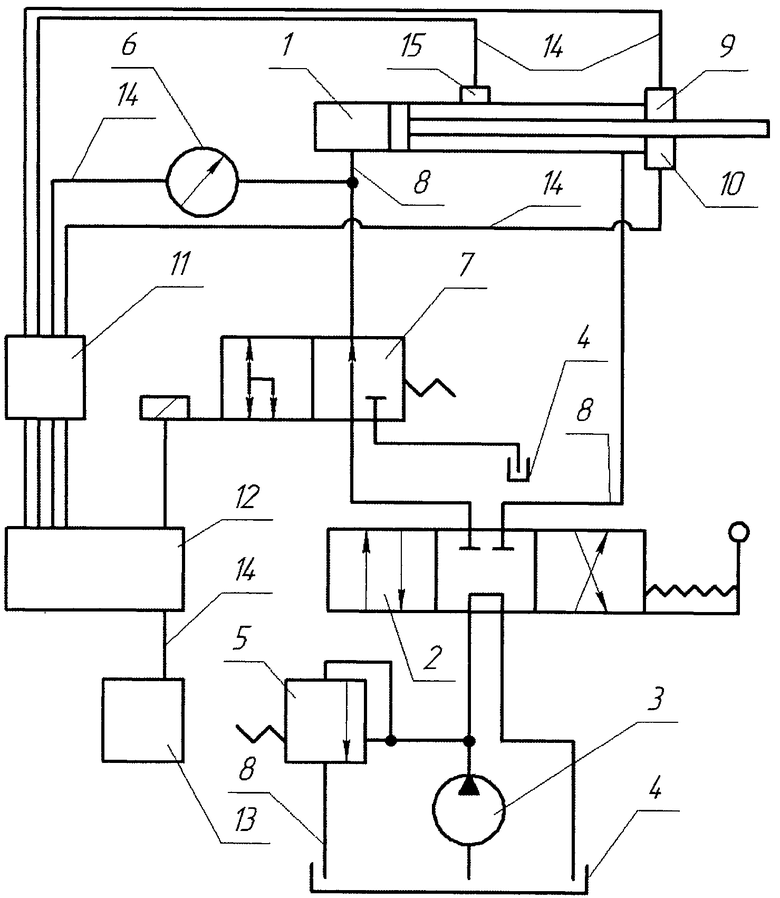
Гидросистема, содержащая силовой гидроцилиндр, полости которого гидромагистралями через гидрораспределитель подключены к источнику питания, снабженному предохранительным клапаном, и сливу, электрический манометр, а также чувствительные элементы осевого перемещения штока и угловой несоосности штока силового гидроцилиндра, закрепленные на его корпусе и подсоединенные к электрическим усилителю и преобразователю, поршневая полость силового гидроцилиндра соединена с гидрораспределителем через электрический манометр и двухпозиционный гидрозолотник с электромагнитным управлением, соединенными с преобразователем, подключенным к индикатору, отличающаяся тем, что на корпусе силового гидроцилиндра установлен датчик пространственного положения, подсоединенный через усилитель к преобразователю.
| ГИДРОСИСТЕМА | 1994 |
|
RU2100665C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ (ВАРИАНТЫ) | 2009 |
|
RU2399576C1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРОВ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНЫХ КРАНОВ СТРЕЛОВОГО ТИПА С ОДИНАКОВЫМ КРАНОВЫМ ОСНАЩЕНИЕМ | 2009 |
|
RU2381173C1 |
| US 4532595 А, 30.06.1985 | |||
| US 4185280 А, 22.01.1980. | |||

