Предлагаемое изобретение относится к устройствам контроля местоположения движущихся объектов и может быть использовано в машиностроении, на транспорте, в частности в горнодобывающей промышленности на рудничных подъемных установках для контроля движения сосудов в стволе.
Целью предлагаемого изобретения является повышение надежности контроля по- ложения перемещения движущегося объекта.
На фиг.1 схематично изображено предлагаемое устройство и диаграмма сигнала в зависимости от перемещения объекта вдоль петлевой неоднородной линии; на фиг.2 - принципиальная схема измерительного генератора высокочастотных колебаний, на фиг.З - схема неоднородной линии. Вдоль пути движения объекта (объект не показан) с укрепленными на нем двумя пассивными
колебательными контурами 1, представляющими собой одновитковую или многовитко- вую рамку с собственной емкостью, проложены две неоднородные линии 2. Обе неоднородные линии 2 размещаются вдоль пути перемещения объекта и представляют собой проводник тока, который через определенный шаг М чередуется неоднородно- стями - колебательными контурами 3 и отрезками экранированного кабеля 4, при этом проводники неоднородной линии 2 индуктивно связаны с колебательным контуром 1. Колебательный контур 3 представляет собой рамку, изготовленную из жесткого провода в виде одного витка или многовитковой рамки. При этом проводники неоднородной линии 2 индуктивно связаны с колебательным контуром 1, а концы их подключены на выход 5 и 6 измерительного генератора высокочастотных колебаний 7,
00
о
СО 00
о о
выполненного, например, по принципу гетеродинного индикатора резонанса (ГИР), выход которого подключен к блоку контроля перемещения 3.
Обе линии по устройству аналогичны, но одна из них (линия А) отличается от другой (линия Б) тем, что их колебательные контура смещены друг относительно друга на величину, равную половине шага М. Линии А и Б располагаются обе по разные стороны движущегося объекта или перпендикулярны друг другу для того, чтобы уменьшилось влияние линий друг на друга.
Для уменьшения потерь в линии 2, связанных с излучением электромагнитной СВ4 энергии на участках сближения линии ее необходимо экранировать. Для этого линию 2 на участках взаимного сближения проводников целесообразно выполнять отрезками экранированного высокочастотного кабеля 4. В зависимости от необходимой точности измерения положения движущегося объекта и длины измеряемого участка, определяются расстояния М между колебательными контурами 3, а также мощность, излучаемая генератором 7.
Для повышения длины измеряемого участка необходимо выбирать частоту генератора 7, и соответственно, пассивного колебательного контура, т.к. при этом будут меньшими потери на излучение, чем при более высоких частотах.
Нижняя граница рабочей части устройства ограничивается габаритами контуров и элементов устройства, а верхняя граница частоты ограничивается резким ростом величины затухания в линии с возрастанием частоты, а также возрастающего трудностью согласования линии на СВЧ и ряд других причин. Рабочий диапазон устройства целесообразно выбирать в диапазоне от 100 до 1000 кГц.
В зависимости от решаемых с помощью предлагаемого устройства задач шаг М может быть либо равномерным, либо неравномерным.
Работа устройства осуществляется следующим образом: в исходном состоянии измерительные генераторы 7, нагрузкой которых являются неоднородные линии 2, питают последние током высокой частоты, при этом на измерительных выходах генераторов, подключенных к блоку контроля перемещения 8 объекта, отсутствует изменение информационного сигнала А и Б.
При движении объекта вдоль неоднородных линий 2, колебательные контура 1. настроенные в резонанс с частотой колебаний измерительных генераторов 7. о силу индукционной связи вызывают отг.ос высокочастотной энергии из линий 2 и изменяют режим работы генераторов 7. что способствует появлению на выходе блоков 8 изменяющихся информационных сигналов А, Б так,
что максимальная величина его будет в случаях, когда контур 1 будет расположен кон- центрично контурам 3 какой-либо линии и равна нулю при преодолевании экранированного участка линии с шагом М, т.е. против отрезка кабеля 4 (на фиг.1 показано пунктиром). Таким образом, при движении объекта вдоль неоднородных линий 2, на выходах измерительных генераторов 7 будут существовать сигналы А и Б с чередую5 щимися изменениями его амплитуд в соответствии с принятым шагом М между колебательными контурами 3.
Блок контроля перемещения объекта 8 содержит реверсный счетчик, соединенный
0 с блоком отражения информации 9. Воз можная схема конкретного выполнения ре- версного счетчика блока 8 приведена в литературе и содержит, например, два компаратора, фазоинвертор, логическую схему
5 и счетчик импульсов. В качестве реверсивного счетчика может быть применен двоичный четырехразрядный счетчик на базе микросхемы К 561 ИЕ11.
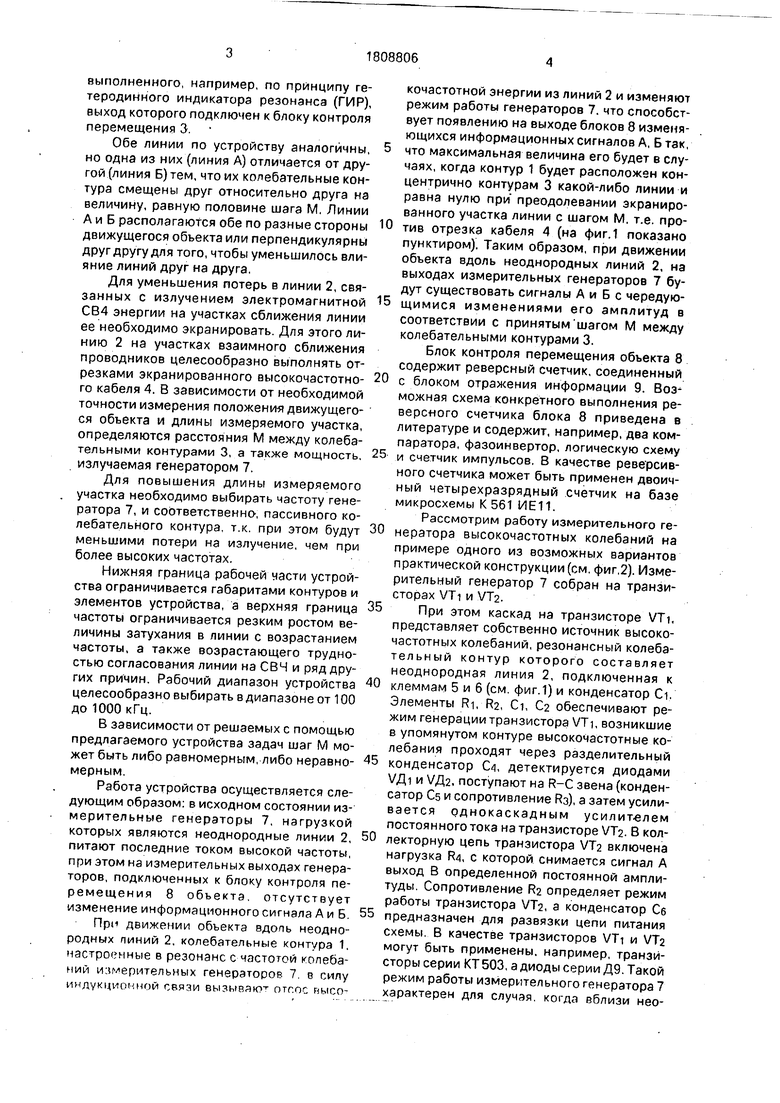
Рассмотрим работу измерительного ге0 нератора высокочастотных колебаний на примере одного из возможных вариантов практической конструкции (см. фиг,2). Измерительный генератор 7 собран на транзисторах VTi и VT2.
5 При этом каскад на транзисторе VTi, представляет собственно источник высокочастотных колебаний,резонансный колебательный контур которого составляет неоднородная линия 2, подключенная к
0 клеммам 5 и 6 (см. фиг.1) и конденсатор CL Элементы Ri, R2, Ci, €2 обеспечивают режим генерации транзистора VTi, возникшие в упомянутом контуре высокочастотные колебания проходят через разделительный
5 конденсатор , детектируется диодами УД1 и УД2, поступают на R-C звена (конденсатор Cs и сопротивление Ra), а затем усили- вается рднокаскадным усилителем постоянного тока на транзисторе VT2. В кол0 лекторную цепь транзистора VT2 включена нагрузка RA, с которой снимается сигнал А выход В определенной постоянной амплитуды. Сопротивление R2 определяет режим работы транзистора VT2, а конденсатор Се
5 предназначен для развязки цепи питания схемы, В качестве транзисторов VTi и VT2 могут быть применены, например, транзисторы серии КТ 503, а диоды серии Д9. Такой режим работы измерительного генератора 7 характерен для случая, когда вблизи неоднородной линии 2. в точках подключения линии к выходам 5 и б отсутствует индуктивно связанный с ней резонансный колебательный контур 1 контролируемого объекта, В случае, если резонансный контур 1, настроенный в резонанс с частотой высокоча- стотных колебаний измерительного генератора 7, индуктивно связать с колебательным контуром (см. фиг. 1) неоднородной линии 2, то произойдет поглощение (отсос) высокочастотной энергии из неоднородной линии в силу свойств магнитосвязанных резонансных цепей. Следовательно, это обстоятельство изменит (уменьшит амплитуду высокочастотных колебаний каскада на транзисторе, в результате чего уменьшится и амплитуда напряжения тока), выпрямленного диодами УД-| и УД2, что в свою очередь вызывает запирание транзистора VJ2, а значит и повышение уровня сигнала А на выходе измерительного генератора 7.
При перемещении колебательного контура 1 на участок экранированного электрического кабеля 4 неоднородной линии 2 (см. фиг.1) - показано пунктиром, поглощение (отсос) энергии колебательным контуром 1 из неоднородной линии 2 уменьшится, что повлечет за собой, в конечном итоге, уменьшение по амплитуде информационного сигнала А и Б на выходе 8 измерительного генератора 7.
Таким образом, при движении объекта с вмонтированными в него резонансными контурами 1 вдоль чередующихся неодно- родностей 3 и 4 линии 2, на входах блока 8 контроля перемещения будут существовать чередующиеся информационные сигналы А и Б (см. фиг.1) в соответствии с шагом М между неоднородностями линии, как указывалось выше.
В моменты прохождения контура 1 мимо контуров 3 открывается транзистор транзисторного каскада, и счетчик импульсов фиксирует одиночный импульс напряжения на выходе транзисторного каскада.
По движению объекта в одну или другую сторону, закрепленные на нем колебательные контуры 1 будут попеременно взаимодействовать с электромагнитным полем при пересечении контуров 3 линий связи, При этом на выходах измерительных генераторов 7 будут попеременно возникать сигналы А, которые фиксируются блоком 8. Логическая схема, входящая в состав устройства реверсивного счетчика, анализирует последовательность прихода сигналов А с выходов первой и второй линий и счетчик в зависимости от направления движения объекта суммирует или отнимает значения, соответствующие пройденному пути. Текущая информация о положении объекта с момента начала движения высвечивается на индикаторном устройстве.
По количеству импульсов, сосчитанных счетчиком импульсов и представленных светодиодами индикатором можно определить текущее положение объекта. Блок контроля перемещения 8 фиксирует момент прохождения объекта мимо контура 3 благодаря тому, что максимальная величина информационного сигнала А будет в случае, когда контур 1 расположен концентрично контурам 3, и равна нулю при преодолении объектом экранированного участка линии.
Отсутствие передающего.элемента на подвижном объекте увеличивает надежность предлагаемого устройства и его долговечность, при этом облегчает обслуживание устройства, особенно в сложных условиях горных предприятий.
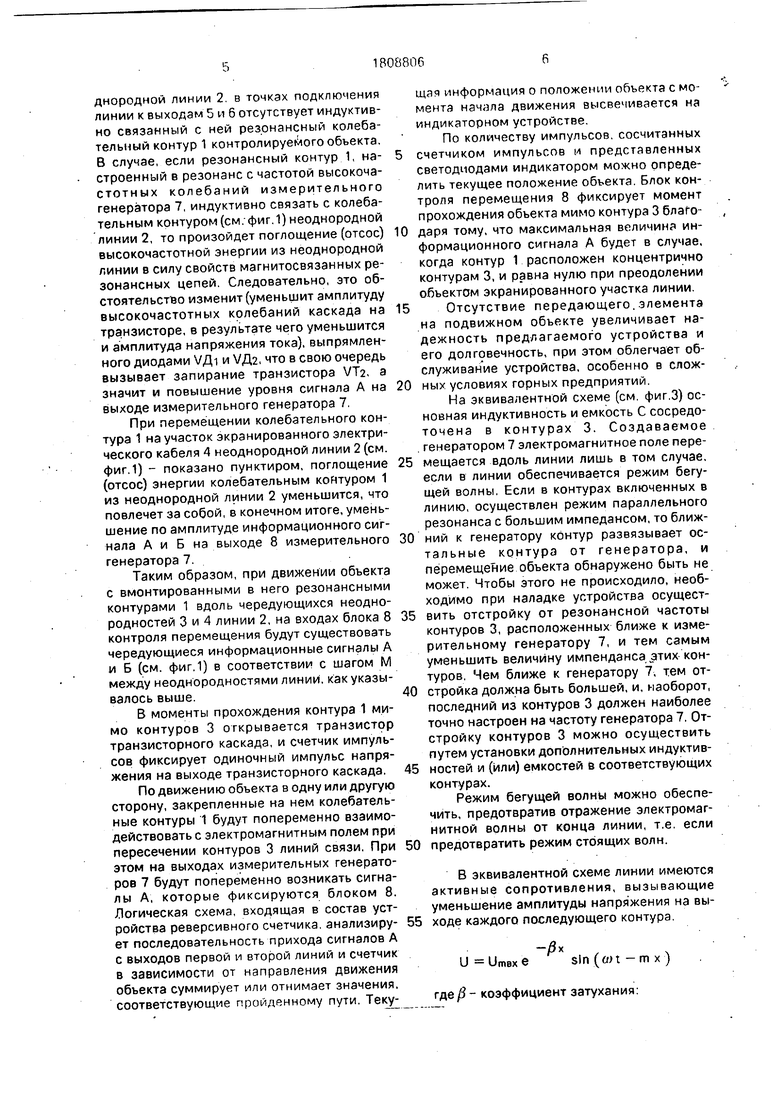
На эквивалентной схеме (см. фиг.З) основная индуктивность и емкость С сосредоточена в контурах 3. Создаваемое . генератором 7 электромагнитное поле перемещается вдоль линии лишь в том случае, если в линии обеспечивается режим бегущей волны. Если в контурах включенных в линию, осуществлен режим параллельного резонанса с большим импедансом, то ближний к генератору контур развязывает остальные контура от генератора, и перемещение объекта обнаружено быть не может. Чтобы этого не происходило, необходимо при наладке устройства осуществить отстройку от резонансной частоты контуров 3, расположенных ближе к измерительному генератору 7, и тем самым уменьшить величину импенданса этих контуров. Чем ближе к генератору 7, тем отстройка должна быть большей, и, наоборот, последний из контуров 3 должен наиболее точно настроен на частоту генератора 7. Отстройку контуров 3 можно осуществить путем установки дополнительных индуктивностей и (или) емкостей в соответствующих контурах.
Режим бегущей волны можно обеспечить, предотвратив отражение электромагнитной волны от конца линии, т.е. если
предотвратить режим стоящих волн.
В эквивалентной схеме линии имеются активные сопротивления, вызывающие уменьшение амплитуды напряжения на вы- ходе каждого последующего контура.
-0х U Umax 6Sin ( О) I - т х )
коэффициент затухания:
Umax - амплитуда бегущей волны на входе линии;
е - основание натуральных логарифмов.
Если длина линии - I, то амплитуда напряжения на ее конце равна:
U Утехе
-/,
Так как мощность на конце линии меньше входной, то чистого режима стоячей волны не будет, т.е. коэффициент бегущей волны не равен нулю.
Обеспечить же чисто режим бегущей волны, т.е. равенство волнового сопротивления активному сопротивлению на конце линии, в полной мере трудно.
Таким образом, в реальной линии будет смешанный режим (см. фиг.З) с определенным коэффициентом бегущей волны:
К
Urn In Umax
Для повышения коэффициента бегущей волны осуществляются при настройке линии ее согласование. При этом в блоке пороговое устройство настраивается так, чтобы оно реагировало лишь на изменения напряжения, большие по уровню Umin.
При движении объекта вдоль неоднородной линии пассивный колебательный контур взаимодействует с контурами 3, в результате чего резко изменяется сопротивление и соответственно ЭДС на выходах 5, 6 линий.
Формула изобретения
Устройство для контроля перемещения движущегося объекта, содержащее колебательный контур, закрепленный на движущемся объекте, генератор высокочастотных колебаний, неоднородную линию связи и блок контроля перемещений, отличающееся тем, что, с целью повышения
надежности контроля положения перемещения движущегося объекта, устройство снабжено блоком индикации, согласующими сопротивлениями, дополнительной неоднородной линией связи, генератором и
колебательным контуром, закрепленным на объекте, причем неоднородные линии связи выполнены в виде последовательных цепочек из колебательных контуров, соединенных экранированным кабелем и
расположенных с возможностью индуктивно-емкостной связи с одним из двух колеба- тельных контуров, закрепленных на движущемся объекте, и, сдвинуты относительно друг друга на величину, равную половине расстояния между колебательными контурами неоднородной линии связи, кроме того, выходы неоднородных линий связи через согласующие сопротивления, по величине равные волновому сопротивлению
неоднородных линий связи, подключены к соответствующим генераторам высокочастотных колебаний, которые, в свою очередь, подключены к блоку контроля перемещений, выход которого подключен к
блоку индикации.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля перемещения движущегося объекта | 1990 |
|
SU1751707A1 |
| ИЗМЕРИТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2001 |
|
RU2213934C2 |
| Способ управления резонансным преобразователем | 1988 |
|
SU1663718A1 |
| Устройство для обнаружения неоднородностей в средах | 1982 |
|
SU1068860A1 |
| Устройство для измерения электропроводности полезных ископаемых | 1981 |
|
SU987551A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2002 |
|
RU2207498C1 |
| Датчик ускорений | 1987 |
|
SU1597733A1 |
| Устройство для обнаружения зон с неоднородными физическими свойствами в изделиях из металлопроката | 2021 |
|
RU2767939C1 |
| Устройстводля определения степени загрязненности моторных масел методом ультразвукового интерферометра | 2021 |
|
RU2750566C1 |
| Способ контроля длины электропроводного объекта | 2017 |
|
RU2677113C1 |
Сущность изобретения: устройство для контроля перемещения движущегося объекта, содержит блок индикации, согласующие сопротивления, две неоднородные линии связи, два генератора и колебательных контура, закрепленные на движущемся объекте, причем неоднородные линии связи выполнены в виде последовательных цепочек из колебательных контуров, соединенных экранированными кабелями и расположенных с возможностью индуктивно-емкостной связи с одним из двух колебательных контуров, и сдвинуты относительно .друг друга на величину, равную половине расстояния между колебательными контурами неоднородной линии связи. При этом выходы неоднородных линий связи через согласующие сопротивления по величине равны волновому сопротивлению неоднородных линий связи, подключены к соответствующим генераторам высокочастотных колебаний, которые, в свою очередь, подключены к блоку контроля перемещений, выход которого подключен к блоку индикации. 3 ил. / Ј
