Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для исследования и моделирования процессов резания | 1989 |
|
SU1777010A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ РАБОЧИХ ОРГАНОВ МЕЛИОРАТИВНЫХ И ЗЕМЛЕРОЙНЫХ МАШИН | 2005 |
|
RU2278368C1 |
| Стенд для исследования процессов резания грунта рабочим органом землеройной машины | 1978 |
|
SU1280366A1 |
| ПОДВОДНОЕ ГРУНТОЗАБОРНОЕ УСТРОЙСТВО | 2002 |
|
RU2230160C1 |
| Стенд для исследования рабочих органов землеройных машин | 1982 |
|
SU1076801A1 |
| Ковш планировщика | 1990 |
|
SU1774977A3 |
| Ковш экскаватора | 2019 |
|
RU2716538C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 1997 |
|
RU2122073C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2013 |
|
RU2509843C1 |
| Стенд для испытания и исследования рабочих органов для бестраншейной прокладки коммуникаций | 1984 |
|
SU1167275A1 |

Использование: для исследования рабочих органов землеройных машин. Сущность изобретения: стенд включает многоярусную раму с направляющими, съемные контейнеры, портал, вертикальную штангу, рычаги с тензоэлементами и рыхлительными рабочими органами. Рабочие органы расположены симметрично вертикальной штанги и направлены навстречу друг другу. Привод рабочих органов выполнен в виде винтовых электромеханизмов. Планирование грунта в контейнере осуществляется съемным ножом. Привод перемещения контейнера по направляющим выполнен в виде электрической лебедки. В нижнем ярусе установлена электропечь для подготовки грунта в контейнерах. 6 з.п. ф-лы. 11 ил.
Изобретение относится к оборудованию для исследования землеройных машин, в частности к стендам для.исследования рабочих органов гидравлических экскаваторов в режиме клещевого рыхления.
Цель изобретения - расширение технологических возможностей стенда.
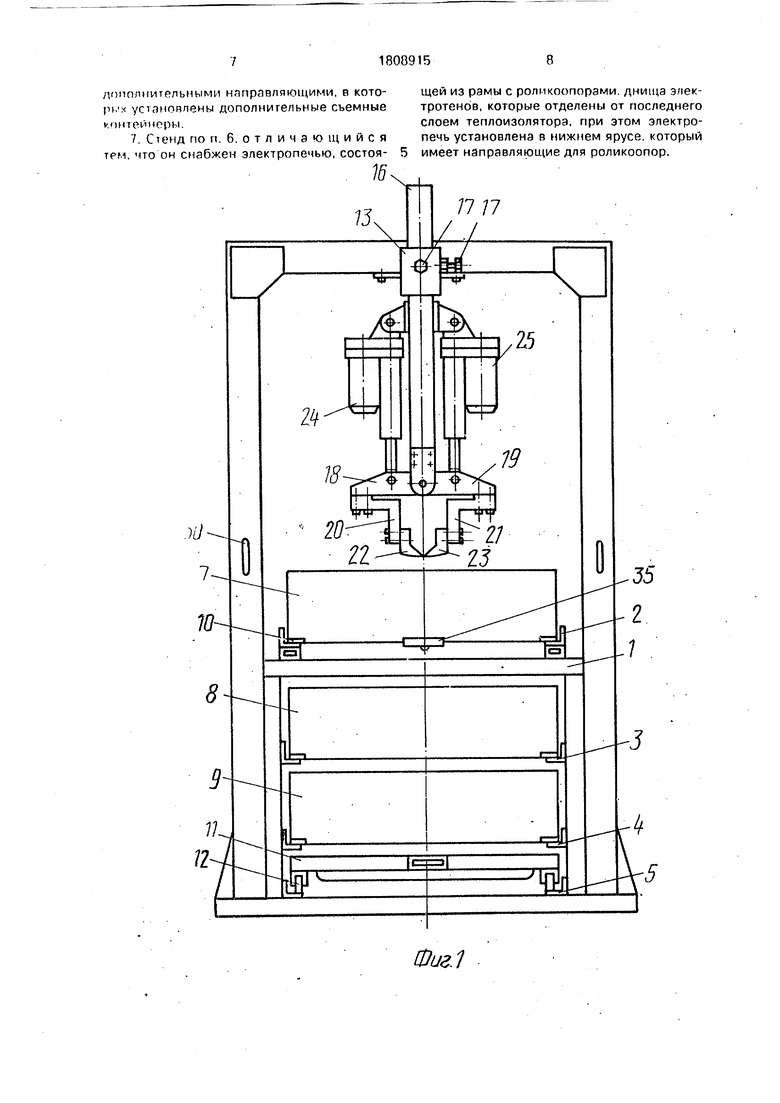
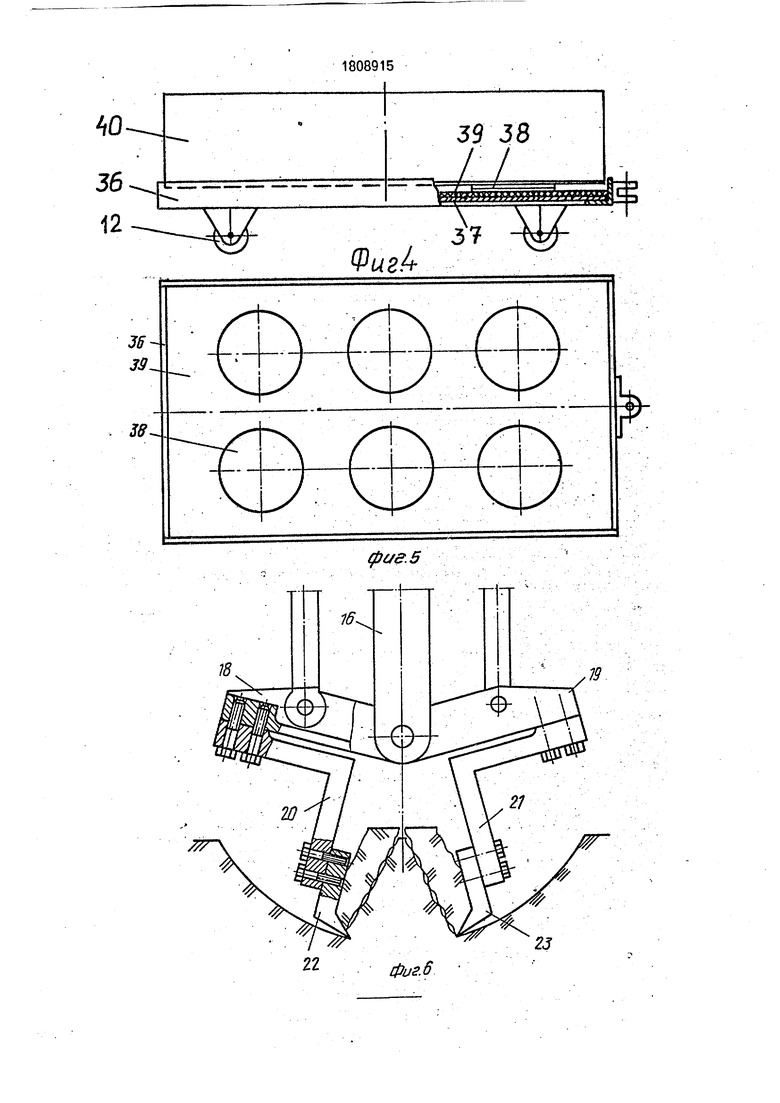
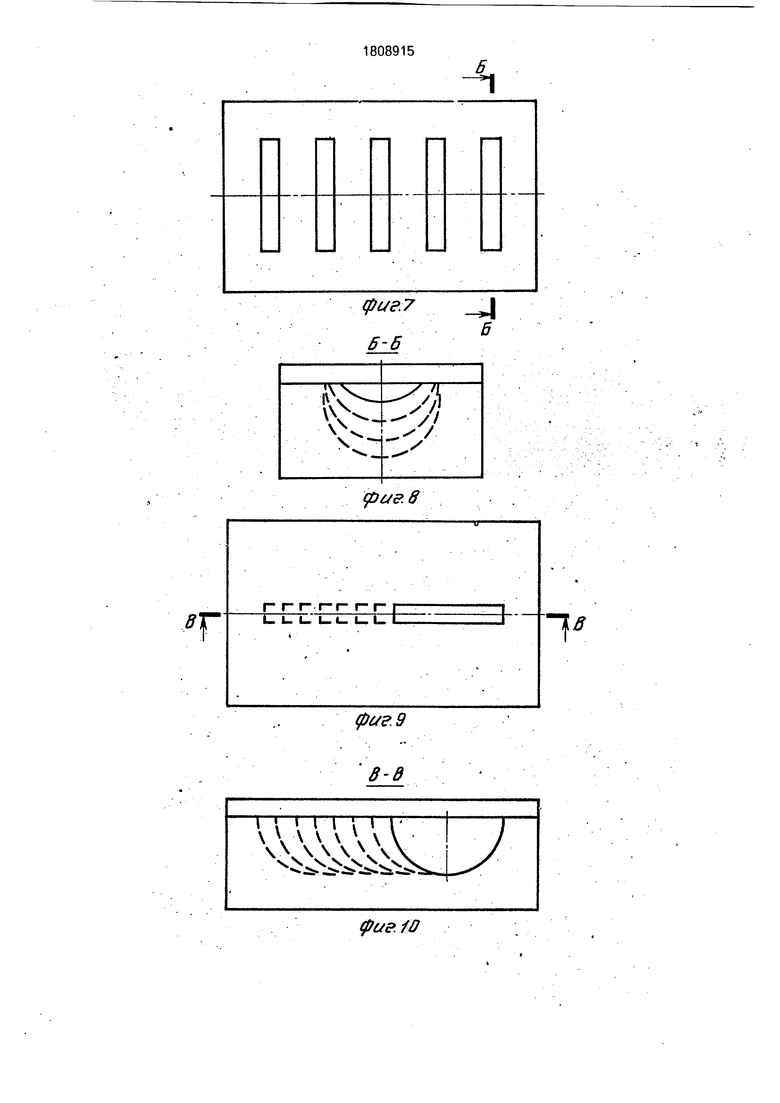
На фиг.1 показан общий вид стенда: на фиг. 2 - вид стенда сбоку в процессе планировки грунта в контейнере; на фиг. 3 - сечение А-А фиг. 2; на фиг. 4 - общий вид электропечи со съемным грунтовым контейнером; на фиг. 5 - вид электропечи сверху; на фиг. 6 - процеср рыхления грунта зубьями рыхлительных рабочих органов стенда в клещевом режиме; на фиг. 7 - размещение прорезей в грунте поперек контейнера при исследовании технологии разработки котлована в мерзлых грунтах; на фиг. 8 - разрез
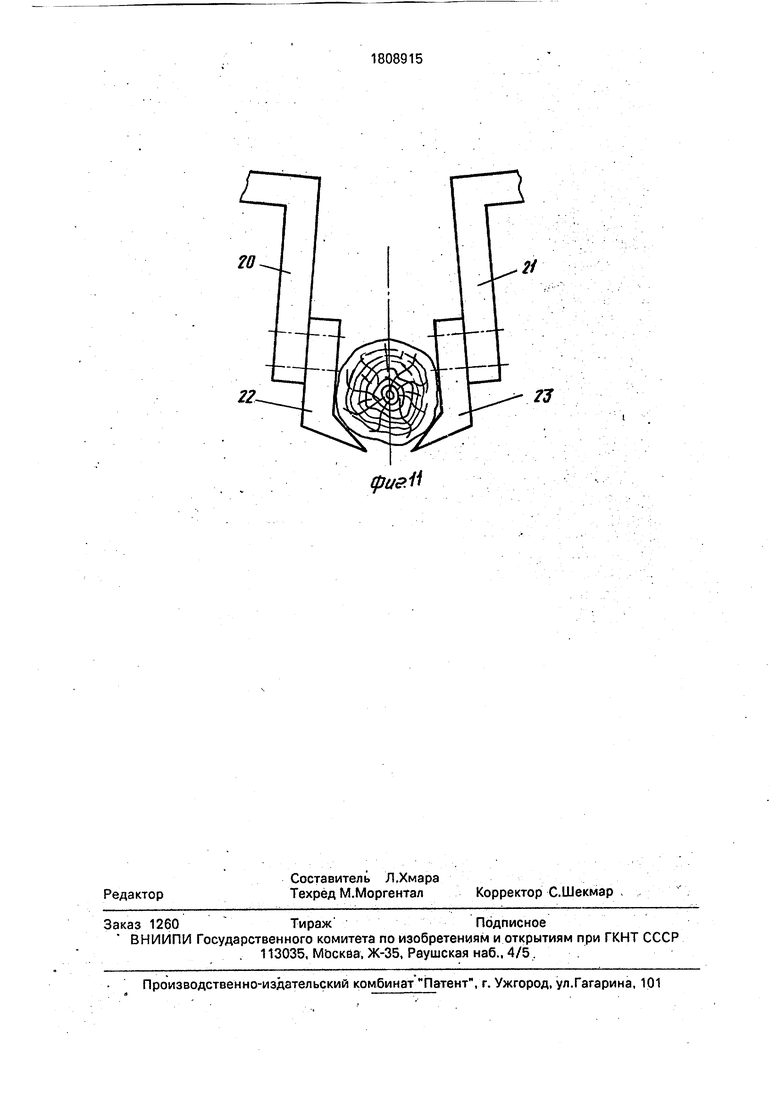
Б-Б фиг. 7; на фиг. 9 - размещение прорези в грунте вдоль контейнера при исследовании технологии отрывки траншеи в мерзлом грунте; на фиг. 10 - разрез В-В фиг. 9; на фиг. 11 - моделирование охвата груза.
Стенд для исследования рабочих органов гидравлического экскаватора включает многоярусную раму 1 с основными 2 и дополнительными 3, 4 и 5 направляющими, портал 6. схемные грунтовые контейнеры 7, 8 и 9 с полозьями 10, установленными в направляющих 2, 3 и 4 рамы, и электропечь 11 с роликоопорами 12, установленными в направляющих 5 нижнего яруса рамы (фиг. 1«.2). На верхней части портала 6 жестко смонтирован кронштейн 13 с прямоугол ь- ными вертикальными отверстиями 14 и 15 (фиг. 3). Через одно из отверстий кронштейна 13 пропущена вертикальная штанга 16 с
00
о
со ч
ел
возможностью вертикального перемещения в отверстии. Кронштейн 13 снабжен винтовыми фиксаторами 17 для фиксации положения штанги 16. Длинные стороны прямоугольных сечений отверстий 14 и 15 перпендикулярны друг другу,. На нижнем конце штанги шарнирно смонтированы рычаги 18 и 19, на которых жестко смонтированы тензометрические элементы 20 и 21 и рыхлительные рабочие органы 22 и 23. Рычаги 18 и 19 поворачиваются относительно штанги 16с помощью винтовых электромеханизмов 24 и 25, корпуса Которых шарнирно смонтированы на штанге 16, а штоки - на рычагах 18 и 19. Винтовые электромеханизмы выпускаются .серийно авиационной про- мышленностью и включают в себя электродвигатель, вращающий с помощью редуктора ходовой винт, по которому перемещается гайка, жестко связанная со штоком, который перемещается в трубе корпуса и при вращении ходового винта выдвигается или втягивается аналогично штоку гидроцилиндра. На портале 6 с помощью болтов жестко монтируется съемный нож 29 с.горизонтальным лезвием (фиг. 2). Для регулирования высоты установки ножа в вертикальных стойках портала 6 выполнены вертикальные пазы 30 (фиг. 1); В процессе планировки грунта контейнер 7 перемещается по направляющим 2 с помощью лебедки (фиг. 2), включающей электродвигатель 31, редуктор 32 и барабан 33. Канат 34 лебедки пропущен под днищем контейнера 7 и снабжен крюковым элементом 35, вступающим в зацепление с торцом днища контейнера 7.
Стенд также снабжен винтом 26 (фиг 2), расположенным параллельно штанге 16. Головка винта 26 шарнирно крепится к кронштейну 13 портала 6, а противоположный конец пропущен через отверстие дополнительного Г-образного кронштейна 27,, жестко закрепленного на штанге 16, При вертикальном перемещении штанга 16 посредством кронштейна 27 опирается на гайку 28 винта 26.
Электропечь 11 стенда состоит (фиг. 4) из рамы 36 с роликоопорами 12 и днища 37 с электротэнами 38. Тэны 38 отделены от днища 37 слоем теплоизслятора 39, например, листом асбеста, расположенным по всей поверхности днища 37.
Стенд работает следующим образом.
Исследование рабочих органов гидравлических экскаваторов включает подготовку грунта или модели грунта (имитирующей грунт) в контейнере 7, планировку поверхности грунта в контейнере .и исследование процесса взаимодействия рабочего органа
с грунтом (процесса копания или процесса рыхления).
При исследовании сменных рабочих органов гидравлических экскаваторов в виде
рыхлительных зубьев 22 и 23 используются натуральные, цементно-песчаные или плавкие модели грунта в виде парафина, парафи- но-песчаных и др. смесей, имитирующих мерзлый грунт. Натуральные и цементнопесчаные модели грунта подготавливаются в грунтовых контейнерах 7,8 и 9 традиционным способом..Для подготовки плавких моделей грунта электропечь 11 извлекается из нижнего яруса рамы 1 стенда, устанавливается на поверхности пола лаборатории, далее один из съемных контейнеров 7, 8 или 9 устанавливается на электротэны 38 электропечи -11 (фиг. 4), При этом днище контейнера входит внутрь рамы 36 электропечи. Затем
электропечь 11 с помощью роликов 12 вместе с установленным на нее контейнером 40 (рис. 40) перемещается из помещения лаборатории. Далее в вентилируемом или открытом помещении электропечь 11 включается
в электросеть и выполняется плавка моделируемой среды. Расплавленная модель грунта в зависимости от ее консистенции естественным или принудительным образом разравнивается по всей площади кон0 тейнера 40 и застывает по мере охлаждения до температуры помещения. Далее контейнер устанавливается на основные (верхн.ие) направляющие 2 стенда, а на стойки портала 6 устанавливается сьемн.ый нож 29 с го5 ризонтальным лезвием, после чего контейнер смещается в противоположную от барабана 33 сторону до упора обратной стороны ножа в стенку контейнера. Далее нож 29 по вертикальным пазам 30 опускает0 ся до упора в поверхность модели грунта, например, парафина, и внедряется в последний на незначительную глубину, а крюковой элемент 35 вводится в зацепление с торцом днища контейнера-7 (фиг. 2). Затем
5 включается электродвигатель 31 лебедки и
по мере наматывания каната 34 на барабан
33 контейнер 7 движется навстречу ножу и
осуществляется планировка поверхности
модели грунта. Затем крюковой элемент 35
0 выводится из. зацепления с торцом днища контейнера и при,обратном вращении электродвигателя возвращается в исходное со- стояНие. Обратное перемещение контейнера выполняется вручную. В случае
5 образования вогнутого мениска, например, при охлаждении парафиновой модели грунта, процесс срезания стружки повторяется по мере опускания ножа 29 до полного выравнивания поверхности грунтовой модели, после чего нож 29 снимается.
При проведении исследования процесса рыхления зубья рабочих органов 22 и 23 с помощью винтовых злектромеханизмов 24 и 25 поворачиваются в нижнее положение, далее при отвинчивании гайки 28 штанга 16 опускается до соприкосновения режущих кромок зубьев 22 и 23 с поверхностью грунтовой модели в контейнере 7 и фиксируется винтовыми фиксаторами 17. Далее втягиванием штоков винтовых электромеханизмов 24 и 25 зубья 22 и 23 разводятся в стороны и вверх, штанга 16 опускается на величину, равную исследуемой глубине рыхления, затем при выдвижении штоков винтовых электромеханизмов 24 и 25 зубья 22 и 23 внедряются в модель грунта (фиг. 6), при этом изменение усилия на режущей кромке каждого зуба регистрируется тензодатчиками тензоэлементов 20 и 21 с помощью специальной усиливающей и записывающей аппаратуры. После окончания процесса рыхления винтовые электромеханизмы 24 и 25 останавливаются (выключаются) и затем зубья 22 и 23 вновь поднимаются вверх. Далее в зависимости от программы исследований или смещается контейнер 7 и выполняется следующий опыт программы исследований (фиг. 7), или опусканием штанги 16 увеличивается глубина рыхления и выполняется повторное рыхление след в след на большей глубине (фиг. 8), или при различных комбинациях перемещений контейнера 7 и штанги 16 моделируется процесс разработки котлована. При исследовании процесса разработки траншеи контейнер 7 снимается с направляющих 2, гайка 28 полностью отвинчивается, штанга 16 опускается вниз и выводится из отверстия 15 (фиг. 3), затем поворачивается на 90°, вводится в отверстие 14 кронштейна 13 и фиксируется винтовыми фиксаторами. Затем ко нтейнер 7 устанавливается на направляющие 2 и при постепенном опускании штанги 16 несколь- кйми проходами выполняется рыхление грунта до заданной исследуемой глубины траншеи. Затем по мере смещения контейнера 7 вдоль направляющих 2 выполняется серия экспериментов по исследованию процесса рыхления траншеи (фиг. 9, 10).
Одновременно с выполнением планировочных и исследовательских работ в контейнере 7 выполняется плавка и остывание модели мерзлого грунта в других съемных контейнерах 8 и 9. После использования в процессе исследования рыхления всей по верхности грунта в контейнере 7 он снимается с направляющих 2 и устанавливается
. либо на электропечь для переплавки грунтовой модели, либо на дополнительные направляющие 3 или 4, а на направляющие 2 устанавливается следующий сьемный контейнер 8 или 9 для продолжения исследования.
Формул а из о бретен и я
0 дополнительными тензоэлементом и рыхли- тельным рабочим органом, при этом рычаги шэрнирно смонтированы на нижнем конце штанги и расположены симметрично относительно последней, привод управления ра5 бочим органом выполнен в виде винтовых электромеханизмов, корпуса которых шарнирно соединены со штангой, а штоки - с рычагами, а грунтовой контейнер снабжен полозьями, установленными в направляю0 щих рамы с возможностью его перемещения посредством дополнительного привода. 2. Стенд по п. 1,отличающий с я тем, что он снабжен смонтированным на стойках портала съемным ножом, а привод
5 перемещения грунтового контейнера вы- полнен в виде электрической лебедки с тяговым канатом, который пропущен под днищем контейнера и снабжен крюковым элементом для зацепления с торцом днища
0 контейнера.
5 5. Стенд по п. 1,отличающийся тем, что грунтовой контейнер выполнен съемным..
дополнительными направляющими, в которых установлены дополнительные съемные контейнеры.
тем. что он снабжен электропечью, состоя- 5 имеет направляющие для роликоопор.
х
щей из рамы с ролмкоопорами. днища элек- тротенов, которые отделены от последнего слоем теплоизолятора, при этом электропечь установлена в нижнем ярусе, который
Фиг.1
pt/гз
К-i
9Ј OV
3168081
в
Г Г Г Гl l L. Ul
1808915
-
фие.7 6-6
J
б
(риг. 8
1
В
(рие.9 В-В
фи. 10
фигЯ
| Горчаков Ю.Н | |||
| Параметры и область применения рыхлителей к гидравлическим экскаваторам | |||
| Дисс | |||
| канд.техн.наук Ленинград, 1984, с | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
