Изобретение относится к области измерительной техники и может быть использовано, в частности, при магнитных измерениях в неоднородном, сложном по характеру распределения в пространстве поле интерференции, имеющем место в воздушном зазоре асинхронных машин со скосом пазов, работающих под нагрузкой.
Цель изобретения - повышение надежности измерительного индукционного преобразователя при магнитных измерениях в воздушном зазоре асинхронных машин со скосом пазов, работающих под нагрузкой.
Для достижения этой цели индукционный преобразователь для магнитных измерений в воздушном зазоре асинхронной машины, содержащий маловитковую катушку индуктивности без ферромагнитного сердечника имеет длину активной стороны катушки соответствующую 0,5-1.0 длины пакета стали машины, активные стороны катушки имеют скос на 100--180 электрических
градусов относительно образующей пакета стали машины в направлении обратном направлению скоса пазов ротора машины и расположены симметрично относительно центра пакета стали.
При этом в зоне скольжений S SHOM показания измерительного прибора должны быть увеличены в 1,06 раза, в зоне скольжений 0 S SHOM результат измерений должен быть увеличен в 1 /КСк раз, где S - текущее значение скольжения, SHOM - значение скольжения, соответствующее номинальному моменту машины, КСк коэффициент скоса активных сторон индукционного преобразователя, определяемого по формуле известной для плоскопараллельных магнитных полей (напр. 3, стр. 47):
00
о
00
ел о
К«
sin 0,5 Д
0,
ЗдесьД - величина скоса активных сторон индукционного преобразователя, относительно образующей пакета стали машины, выраженная в электрических градусах.
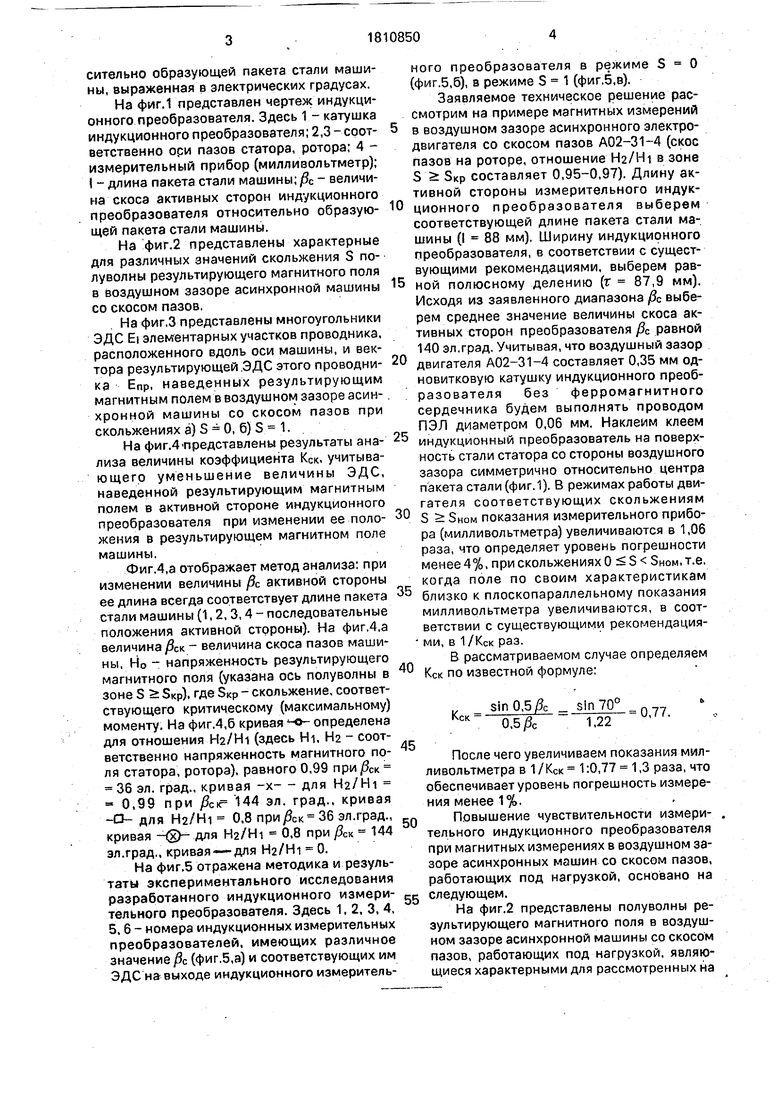
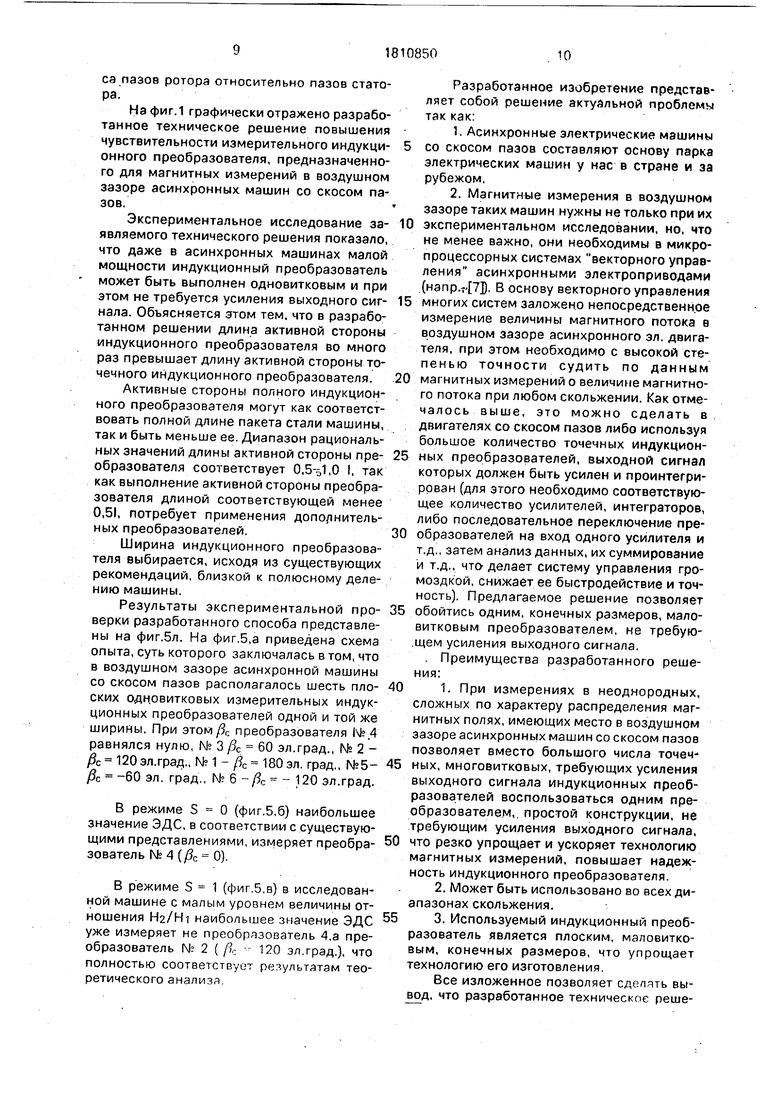
На фиг.1 представлен чертеж индукционного преобразователя. Здесь 1 -катушка индукционного преобразователя; 2,3 - соответственно ори пазов статора, ротора; 4 - измерительный прибор (милливольтметр); I - длина пакета стали машины; - величина скоса активных сторон индукционного преобразователя относительно образующей пакета стали машины.
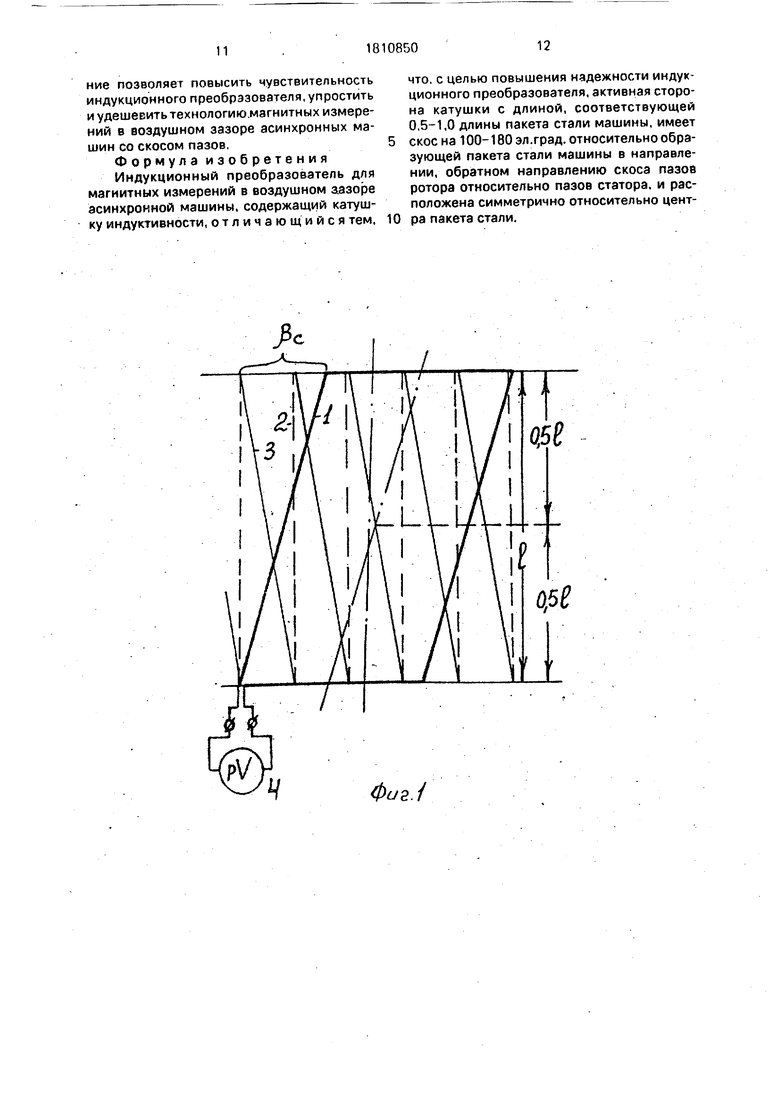
На фиг.2 представлены характерные для различных значений скольжения S полуволны результирующего магнитного поля в воздушном зазоре асинхронной машины со скосом пазов.
На фиг.З представлены многоугольники ЭДС EI элементарных участков проводника, расположенного вдоль оси машины, и вектора результирующей .ЭДС этого проводника Епр, наведенных результирующим магнитным полем в воздушном зазоре асин-. хронной машины со скосом пазов при скольжениях a) S 0, б) S 1.
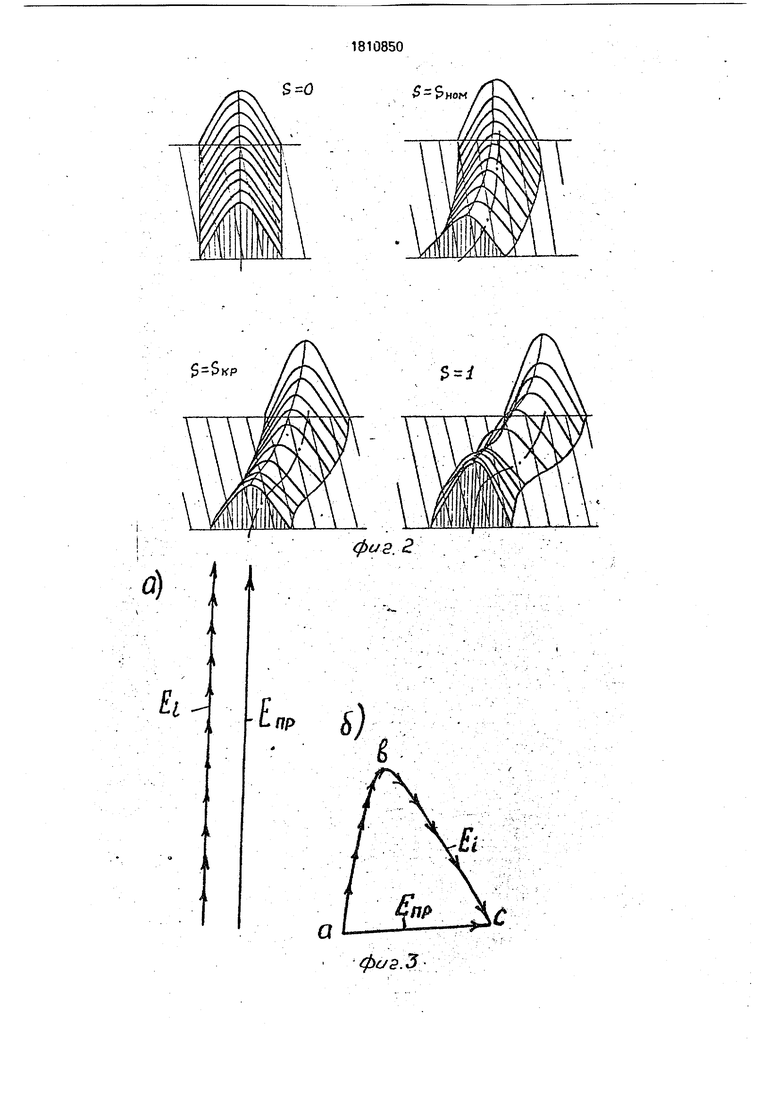
На фиг.4-представлены результаты анализа величины коэффициента Кск. учитывающего уменьшение величины ЭДС, наведенной результирующим магнитным полем в активной стороне индукционного преобразователя при изменении ее положения в результирующем магнитном поле машины.
Фиг.4,а отображает метод анализа; при изменении величины (Зс активной стороны ее длина всегда соответствует длине пакета стали машины (1,2,3,4 - последовательные положения активной стороны). На фиг.4,а величина /3Ск величина скоса пазов машины, Но - напряженность результирующего магнитного поля (указана ось полуволны в зоне S 5:8кр), где 5кр - скольжение, соответствующего критическому (максимальному) моменту. На фиг.4,6 кривая определена для отношения На/Ж (здесь Hi, Й2 - соответственно напряженность магнитного поля статора, ротора), равного 0,99 при/3ск 36 эл. град., кривая -х- - для На/Hi
- 0,99 при 144 эл. град., кривая
-О- для Н2/Н1 0,8 36 эл.град., кривая ф- для На/Ж 0,8 при /Зек 144 эл.град., кривая--для На/Ж 0.
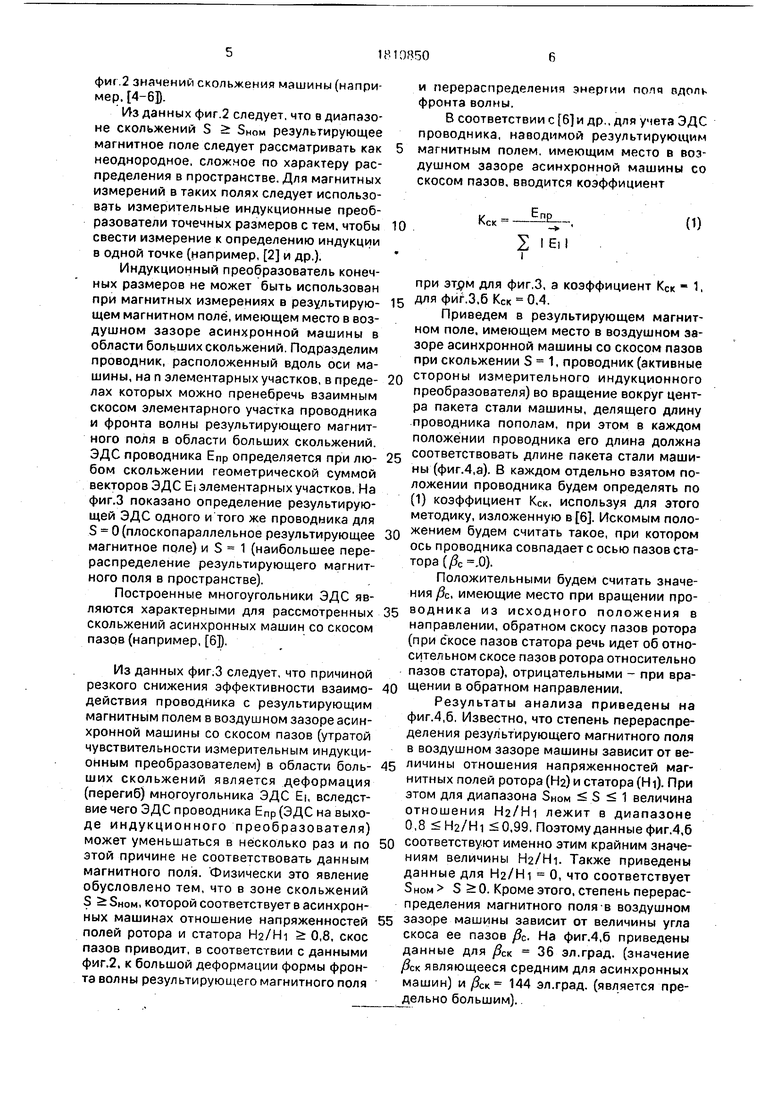
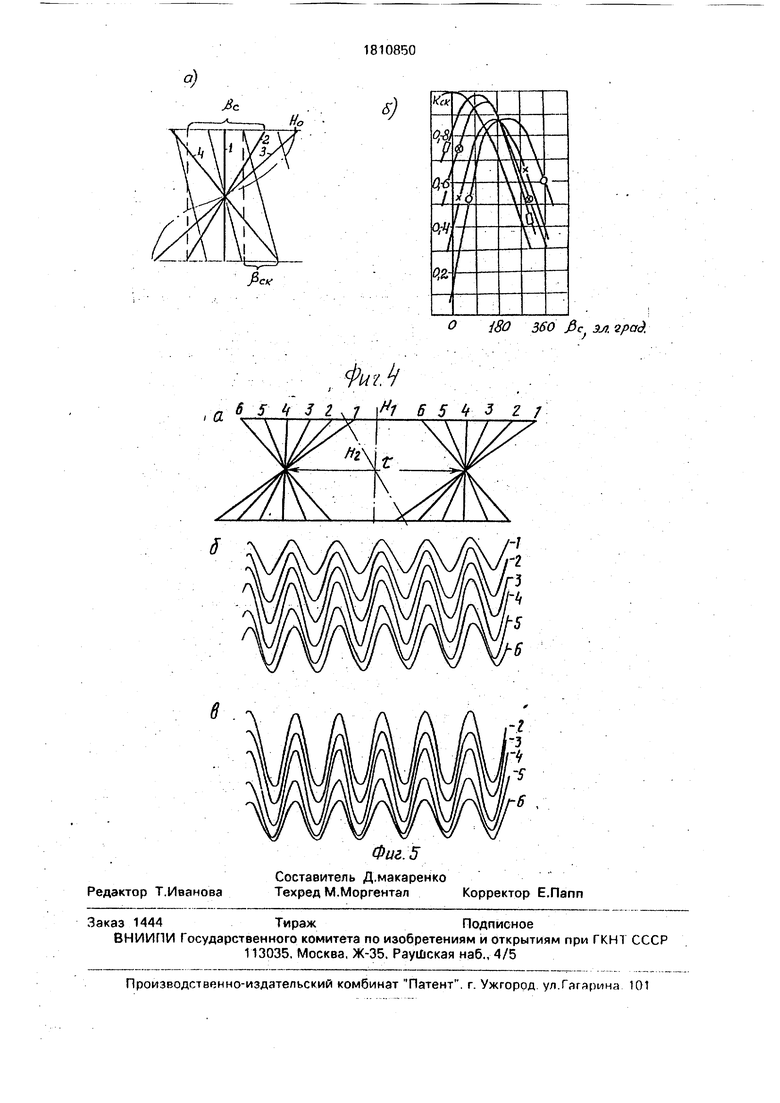
На фиг.5 отражена методика и результаты экспериментального исследования разработанного индукционного измерительного преобразователя. Здесь 1, 2, 3, 4, 5, б - номера индукционных измерительных преобразователей, имеющих различное значение (фиг.5,а) и соответствующих им ЭДС на выходе индукционного измерительного преобразователя в режиме 3 0 (фиг.5,б), в режиме 5 1 (фиг.5,в).
Заявляемое техническое решение рассмотрим на примере магнитных измерений
в воздушном зазоре асинхронного электродвигателя со скосом пазов А02-31-4 (скос пазов на роторе, отношение На/Ж в зоне S SKp составляет 0,95-0,97). Длину активной стороны измерительного индукционного преобразователя выберем соответствующей длине пакета стали машины (I 88 мм). Ширину индукционного преобразователя, в соответствии с существующими рекомендациями, выберем рав5 ной полюсному делению (т 87,9 мм). Исходя из заявленного диапазона /8С выберем среднее значение величины скоса активных сторон преобразователя равной 140 эл.град. Учитывая, что воздушный зазор
0 двигателя А02-31-4 составляет 0,35 мм од- новитковую катушку индукционного преобразователя без ферромагнитного сердечника будем выполнять проводом ПЭЛ диаметром 0,06 мм. Наклеим клеем
5 индукционный преобразователь на поверхность стали статора со стороны воздушного зазора симметрично относительно центра пакета стали (фиг. 1). В режимах работы двигателя соответствующих скольжениям
0 S SHOM показания измерительного прибора (милливольтметра) увеличиваются в 1,06 раза, что определяет уровень погрешности менее 4%, при скольжениях О SS SHOM, т.е. когда поле по своим характеристикам
5 близко к плоскопараллельному показания милливольтметра увеличиваются, в соответствии с существующими рекомендация- ми, в 1/Кск раз.
В рассматриваемом случае определяем КСк по известной формуле;
v sin 0.5 Д: sin 70° „.,, Кск 0,5 & --Ш ° 77
После чего увеличиваем показания милливольтметра в 1/КСк 1:0,77 1,3 раза, что обеспечивает уровень погрешность измерения менее 1%.,
Повышение чувствительности измерительного индукционного преобразователя при магнитных измерениях в воздушном зазоре асинхронных машин со скосом пазов, работающих под нагрузкой, основано на
следующем.
На фиг.2 представлены полуволны результирующего магнитного поля в воздушном зазоре асинхронной машины со скосом пазов, работающих под нагрузкой, являющиеся характерными для рассмотренных на
фиг.2 значений скольжения машины (например. 4-6)Из данных фиг.2 следует, что в диапазоне скольжений S 2: SHOM результирующее магнитное поле следует рассматривать как неоднородное, сложное по характеру распределения в пространстве. Для магнитных измерений в таких полях следует использовать измерительные индукционные преобразователи точечных размеров с тем. чтобы свести измерение к определению индукции в одной точке (например, 2 и др.).
Индукционный преобразователь конечных размеров не может быть использован при магнитных измерениях в результирующем магнитном поле, имеющем место в воздушном зазоре асинхронной машины в области больших скольжений. Подразделим проводник, расположенный вдоль оси машины, на п элементарных участков, в пределах которых можно пренебречь взаимным скосом элементарного участка проводника и фронта волны результирующего магнитного поля в области больших скольжений. ЭДС проводника Епр определяется при любом скольжении геометрической суммой векторов ЭДС EI элементарных участков, На фиг.З показано определение результирующей ЭДС одного и того же проводника для S 0 (плоскопараллельное результирующее магнитное поле) и S 1 (наибольшее перераспределение результирующего магнитного поля в пространстве).
Построенные многоугольники ЭДС являются характерными для рассмотренных скольжений асинхронных машин со скосом пазов (например, 6).
Из данных фиг.З следует, что причиной резкого снижения эффективности взаимодействия проводника с результирующим магнитным полем в воздушном зазоре асинхронной машины со скосом пазов (утратой чувствительности измерительным индукционным преобразователем) в области больших скольжений является деформация (перегиб) многоугольника ЭДС EI, вследствие чего ЭДС проводника ЕПр (ЭДС на выходе индукционного преобразователя) может уменьшаться в несколько раз и по этой причине не соответствовать данным магнитного поля. Физически это явление обусловлено тем, что в зоне скольжений S SHOM, которой соответствует в асинхронных машинах отношение напряженностей полей ротора и статора Н2/Ж 0,8, скос пазов приводит, в соответствии с данными фиг.2, к большой деформации формы фронта волны результирующего магнитного поля
и перераспределения энергии поля вдоль фронта волны.
В соответствии с др.. для умета ЭДС проводника, наводимой результирующим магнитным полем, имеющим место в воздушном зазоре асинхронной машины со скосом пазов, вводится коэффициент
10
Кск -- V-. I lEil
(1)
при этрм для фиг.З, а коэффициент «с ш 1,
для фиг.З,б Кск 0.4.
Приведем в результирующем магнитном поле, имеющем место в воздушном зазоре асинхронной машины со скосом пазов при скольжении 5 1, проводник (активные
стороны измерительного индукционного преобразователя) во вращение вокруг центра пакета стали машины, делящего длину проводника пополам, при этом в каждом положении проводника его длина должна
соответствовать длине пакета стали машины (фиг.4,а). В каждом отдельно взятом положении проводника будем определять по (1) коэффициент Кск, используя для этого методику, изложенную в 6. Искомым положением будем считать такое, при котором ось проводника совпадает с осью пазов статора ( ,0).
Положительными будем считать значения /Зс, имеющие место при вращении проводника из исходного положения в направлении, обратном скосу пазов ротора (при скосе пазов статора речь идет об относительном скосе пазов ротора относительно пазов статора), отрицательными - при вращении в обратном направлении.
Результаты анализа приведены на фиг.4,б, Известно, что степень перераспределения результирующего магнитного поля в воздушном зазоре машины зависит от величины отношения напряженностей магнитных полей ротора(Н2)истатора(НО. При этом для диапазона SHOM :Ј S 1 величина отношения H2/H-I лежит в диапазоне 0,8 H2/Hi 0,99. Поэтому данные фиг.4,6
соответствуют именно этим крайним значениям величины Ha/Hi. Также приведены данные для H2/Hi 0, что соответствует SHOM S 0. Кроме этого, степень перераспределения магнитного поля-в воздушном
зазоре машины зависит от величины угла скоса ее пазов . На фиг.4,6 приведены данные для /Зек 36 эл.град. (значение являющееся средним для асинхронных машин) и Дж 144 эл.град. (является предельно большим)..
Из данных фиг.4,6 следует, что, вращая проводник (поворачивая вокруг центра пакета стали машины активные стороны измерительного индукционного преобразователя в соответствии с фиг.4,а в результирующем магнитном поле, имеющем место в воздушном зазоре асинхронной машины при скольжении S 5: SHOM можно определить такое положение проводника (активных сторон преобразова- теля), при котором КСк проводника (чувствительность индукционного преобразователя возрастут в несколько раз (например, для H2/Hi 0,99 - в шесть раз). При этом поворот проводника необходимо осу- ществлять в направлении обратном скосу пазов ротора (относительно статора) до значения fie равного 180 электрическим градусам (для На/Ж 0,99). Физически это объясняется тем, что ось полуволны резуль- тирующего магнитного поля в зоне S SHOM сориентирована к образующей пакета стали машины под тем же углом и поэтому вращая проводник и располагая его под углом + рс 180 эл.град, мы тем самым распола- гаем его параллельно фронту волны результирующего магнитного поля. При этом для повышения чувствительности индукционного преобразователя скос активных сторон его катушки (направление вращения про- водника на фиг.4,а) должен выполняться в направлении обратном скосу пазов ротора относительно пазов статора/так как именно
в этом направлении всегда располагается ось полуволны результирующего магнитно го поля (фиг.2). Значение Н2/Ж 0,99 при S 2: SHOM практически никогда в асинхронных машинах не имеет место (это предельное Значение) и, следовательно, . 180 эл.град. - это предельное значение . Обычно в асинхронных машинах со скосом пазов при S SHOM имеет место H2/Hi 0,97, что определяют величину КСк скошенной активной стороны катушки близкой к 0,9, и следовательно, осуществив скос активных сторон индукционного преобразователя в обратном направлении скосу пазов ротора в режиме S 2: SHOM мы от утраты информации преобразователя конечных размеров, перейдем к измерениям в сложных по характеру распределения в пространстве неоднородных магнитных полях с достаточной для практических полей точностью..
Из фиг.4,6 следует, что и при малых значениях H2/Hi скос активных сторон индукционного преобразователя позволяет очень существенно повысить его чувствительность и при этом необходимый уровень
-
510 152025 30
35
40
45
50
fic может быть уменьшен вплоть до 100 эл.град., хотя и прежнее значение/ с 180 эл.град. дает удовлетворительный результат, физически возможность значительного повышения КСк в зоне Н2/Нч «0,80 при значительно меньших значениях/3с по сравнению с зоной значений Н2/Н1 1 объясняется тем, что меньшим значениям H2/Hi соответствует и меньшее перераспределение в пространстве результирукщего магнитного поля.
Из 1 известно, что у проектируемых в настоящее время тесламетров уровень погрешности магнитных измерений составляет 5% (при этом речь идет о простых по распределению в пространстве полях). Как следует из фиг.4,6 в зоне S 5: SHOM для того, чтобы выйти на уровень погрешности, не превышающей 5% (относительная погрешность) результат измерений должен быть увеличен в 1,06 раза.
Из изложенного следует, что в асинхронных машинах со скосом пазов в зоне скольжений S SHOM величина скоса активных сторон индукционного преобразователя, необходимая для повышения чувствительности индукционного преобразователя при магнитных измерениях в результирующем магнитном поле, имеющего место в воздушном зазоре машины, определяется диапазоном 100-180 эл.град., при этом меньшие значения выбираются для машин с небольшим уровнем Нг/Hi , в рассматриваемой зоне скольжений, большие значения/ с - для машин с H2/Hi - 1. Индукционный преобразователь должен симметрично расположен относительно центра пакета стали машины и скос его активных сторон осуществляется в направлении обратном скосу пазов ротора относительно пазов статора (фиг.1). Результат измерений должен быть увеличен в 1,06 раза.
В диапазоне скольжений 0 S SHOM следует воспользоваться методикой обычно принятой для плоскопараллельного поля, т.е. результат измерений должен быть увеличен в Кск раз, где в соответствии с 3,
Кск
sin 0.5/Зс
0.5 Д:
В электрических машинах речь идет о взаимном скосе пазов обмоток статора и ротора. Поэтому иногда выполняют скос на статоре. На во всех случаях речь идет о скосе пазов активных сторон преобразователя в направлении обратном направлению скоса пазов ротора относительно пазов статора.
На фиг. 1 графически отражено разработанное техническое решение повышения чувствительности измерительного индукци- онного преобразователя, предназначенного для магнитных измерений в воздушном зазоре асинхронных машин со скосом пазов.
Экспериментальное исследование за- являемого технического решения показало, что даже в асинхронных машинах малой мощности индукционный преобразователь может быть выполнен одновитковым и при этом не требуется усиления выходного сиг- нала. Объясняется этом тем. что в разработанном решении длина активной стороны индукционного преобразователя во много раз превышает длину активной стороны точечного индукционного преобразователя.
Активные стороны полного индукционного преобразователя могут как соответствовать полной длине пакета стали машины, так и быть меньше ее. Диапазон рациональных значений длины активной стороны пре- образователя соответствует 0,,0 I, так как выполнение активной стороны преобразователя длиной соответствующей менее 0,51, потребует применения дополнительных преобразователей.
Ширина индукционного преобразователя выбирается, исходя из существующих рекомендаций, близкой к полюсному делению машины.
Результаты экспериментальной про- верки разработанного способа представлены на фиг,5л. На фиг,5,а приведена схема опыта, суть которого заключалась в том, что в воздушном зазоре асинхронной машины со скосом пазов располагалось шесть пло- ских одновитковых измерительных индукционных преобразователей одной и той же ширины. При этомД; преобразователя №4 равнялся нулю, № 3 60 эл.град., № 2 - Д: 120 эл.град., №1 - 180 эл. град., -60 эл. град., N; 6 - 120 эл.град.
В режиме 5 0 (фиг.5,б) наибольшее значение ЭДС, в соответствии с существующими представлениями, измеряет преобра- зователь № 4 ( 0).
В режиме S 1 (фиг.5,в) в исследованной машине с малым уровнем величины отношения На/Ж наибольшее значение ЭДС уже измеряет не преобразователь 4,а преобразователь Ns 2 ( г 120 эл.град.), что полностью соответствует результатам теоретического анализа.
Разработанное изобретение представляет собой решение актуальной проблемы так как:
1. Асинхронные электрические машины со скосом пазов составляют основу парка электрических машин у нас в стране и за рубежом,
2. Магнитные измерения в воздушном зазоре таких машин нужны не только при их экспериментальном исследовании, но, что не менее важно, они необходимы в микропроцессорных системах векторного управления асинхронными электроприводами .(напр.), В основу векторного управления многих систем заложено непосредственное измерение величины магнитного потока в воздушном зазоре асинхронного эл. двигателя, при этом необходимо с высокой степенью точности судить по данным магнитных измерений о величине магнитного потока при любом скольжении. Как отмечалось выше, это можно сделать в двигателях со скосом пазов либо используя большое количество точечных индукционных преобразователей, выходной сигнал которых должен быть усилен и проинтегрирован (для этого необходимо соответствующее количество усилителей, интеграторов, либо последовательное переключение преобразователей на вход одного усилителя и т.д., затем анализ данных, их суммирование и т.д., что-делает систему управления громоздкой, снижает ее быстродействие и точность). Предлагаемое решение позволяет обойтись одним, конечных размеров, мало- витковым преобразователем, не требую- .щем усиления выходного сигнала,
. Преимущества разработанного решения:
1. При измерениях в неоднородных, сложных по характеру распределения магнитных полях, имеющих место в воздушном зазоре асинхронных машин со скосом пазов позволяет вместо большого числа точечных, многовитковых, требующих усиления выходного сигнала индукционных преобразователей воспользоваться одним преобразователем,, простой конструкции, не требующим усиления выходного сигнала, что резко упрощает и ускоряет технологию магнитных измерений, повышает надежность индукционного преобразователя.
2. Может быть использовано во всех диапазонах скольжения.
3. Используемый индукционный преобразователь является плоским, маловитко- вым, конечных размеров, что упрощает технологию его изготовления.
Все изложенное позволяет оделять вывод, что разработанное техническое решение позволяет повысить чувствительность индукционного преобразователя, упростить и удешевить технологию.магнитных измерений в воздушном зазоре асинхронных машин со скосом пазов,
Ф о р м у л а и з о б р е т е н и я Индукционный преобразователь для магнитных измерений в воздушном аазоре асинхронной машины, содержащий катушку индуктивности, отличающийся тем.
что, с целью повышения надежности индукционного преобразователя, активная сторона катушки с длиной, соответствующей 0,5-1,0 длины пакета стали машины, имеет скос на 100-180 эл.град, относительно образующей пакета стали машины в направлении, обратном направлению скоса пазов ротора относительно пазов статора, и расположена симметрично относительно центра пакета стали.
фи г. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный преобразователь для магнитных измерений в воздушном зазоре асинхронной машины | 1989 |
|
SU1712910A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ПОГРУЖНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2011 |
|
RU2463612C1 |
| СТАТОР РЕВЕРСИВНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 1994 |
|
RU2121206C1 |
| Асинхронно-синхронный преобразователь частоты | 1974 |
|
SU692017A1 |
| АСИНХРОННЫЙ ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2759161C2 |
| Асинхронная машина | 2024 |
|
RU2833017C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2015 |
|
RU2585279C1 |
| Способ определения активных потерь в магнитопроводе статора электрической машины переменного тока | 1987 |
|
SU1506407A1 |
| ЭЛЕКТРОМАШИННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ (ВАРИАНТЫ) | 2012 |
|
RU2503117C2 |
| СИНХРОННО-АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2752234C2 |
Изобретение относится к области измерительной техники и может быть использо-. вано, в частности, при магнитных измерениях в неоднородном, сложном по характеру распределения в пространстве магнитном поле интерференции, имеющем место в воздушном зазоре асинхронных машин со скосом пазов, работающих под нагрузкой. Суть изобретения - заключается в том, что индукционный преобразователь для магнитных измерений в воздушном зазоре асинхронной машины имеет катушку индуктивности, активная сторона которой длиной, соответствующей 0,5-1,0 длины пакета стали машины, имеет скос на 100-180 электрических градусов относительно образующей пакета стали машины в направлении обратном направлению скоса пазов ротора и расположена симметрично относительно центра пакета стали, измерительный прибор. 5 ил. Ё
а}
фаэ.З
ФиЛ
, а з 6 $ J / /
| Байда Л.Т., Добротворский Н.С., Душин Е.М | |||
| и др | |||
| Электрические измерения, Л., Энергия, 1980, стр | |||
| Способ изготовления гибких труб для проведения жидкостей (пожарных рукавов и т.п.) | 1921 |
|
SU268A1 |
