а также и в режиме, когда энергия ветра превышает величину, требуемую нагрузкой
(за счет параллельной работы AM и балластной нагрузки). 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНАЯ ВЕТРОДИЗЕЛЬЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 2000 |
|
RU2174191C1 |
| Ветроэнергетическая установка | 2021 |
|
RU2770526C1 |
| Ветроэнергетическая установка | 2016 |
|
RU2615564C1 |
| АВТОНОМНАЯ ВЕТРОДИЗЕЛЬЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2139444C1 |
| Ветроэлектрическая установка с инерционным аккумулятором энергии | 1980 |
|
SU951626A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2468251C1 |
| Ветросолнечная установка автономного электроснабжения | 2018 |
|
RU2680642C1 |
| Агрегат бесперебойного электроснабжения | 1990 |
|
SU1739439A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ НАПРЯЖЕНИЯ И ЧАСТОТЫ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2015 |
|
RU2590929C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОХЛАЖДАЮЩЕЙ СРЕДЫ ТЕПЛОВОЙ МАШИНЫ | 2003 |
|
RU2264544C2 |
Сущность изобретения: подключение к кольцам ротора AM преобразователя частоты, управляемого САР, на один из входов которой подается сигнал от за датчика частоты, позволяет независимо от переходных динамических процессов в установке генерировать электроэнергию с напряжением, частота которого точно равна частоте задат- чика частоты. Качество генерируемой энергии с точки зрения гармонического состава тока и напряжения обеспечивается за счет силового питания преобразователя частоты от дополнительно введенного ВСГ, напряжение на выход которого регулируется с помощью первого функционального блока в функции частоты скольжения ротора AM. Наличие преобразователя частоты в цепи обмотки ротора AM позволяет так же эффективно использовать энергию ветра за счет оптимального регулирования частоты вращения AM. Наряду с этим посредством регулирования реактивной мощности AM достигается работа AM с максимально возможным КПД. В результате действия дополнительно введенных датчика скорости ветра второго и третьего функциональных блоков указанные положительные свойства имеют место как в режиме, когда энергия ветра достаточна для питания нагрузки и работает только AM, так и в режиме, когда энергия ветра недостаточна для питания нагрузки (за счет параллельной работы AM и дизеля), « & 00 Сл) ю СО 
Изобретение относится к области электротехники и предназначено для питания электропотребителя в автономных энергосистемах.
Целью изобретения является улучшение качества вырабатываемой установкой электроэнергии путем точного поддержания частоты генерируемого напряжения,
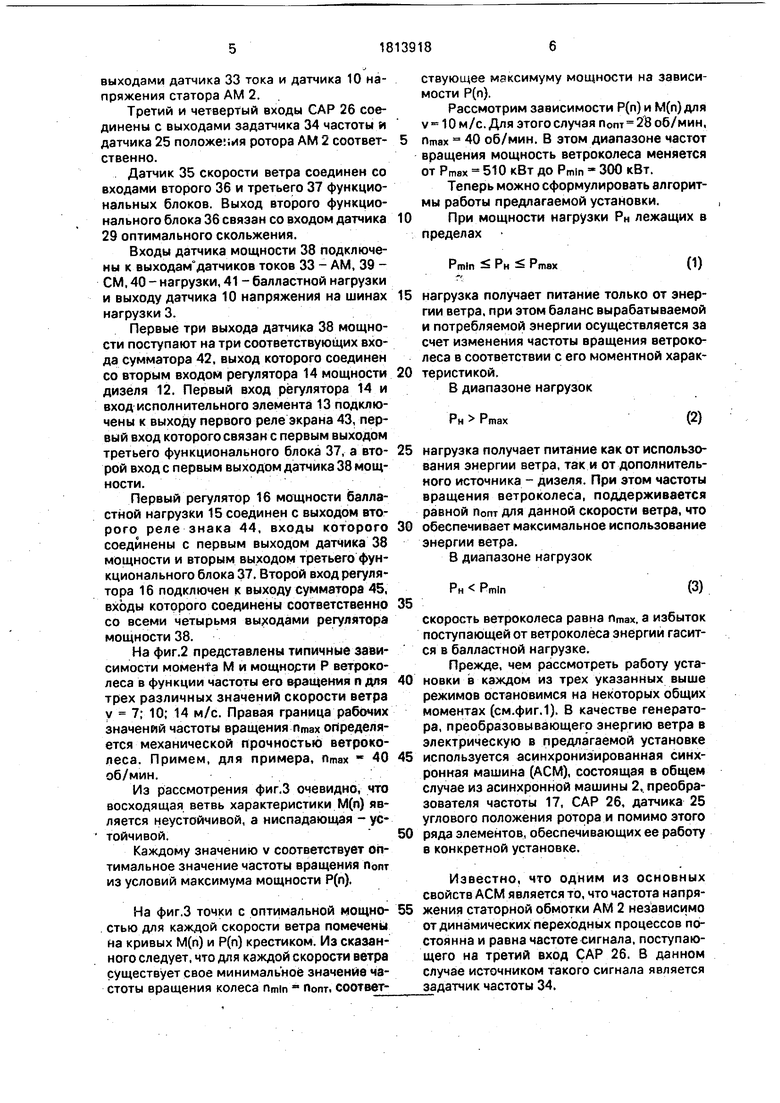
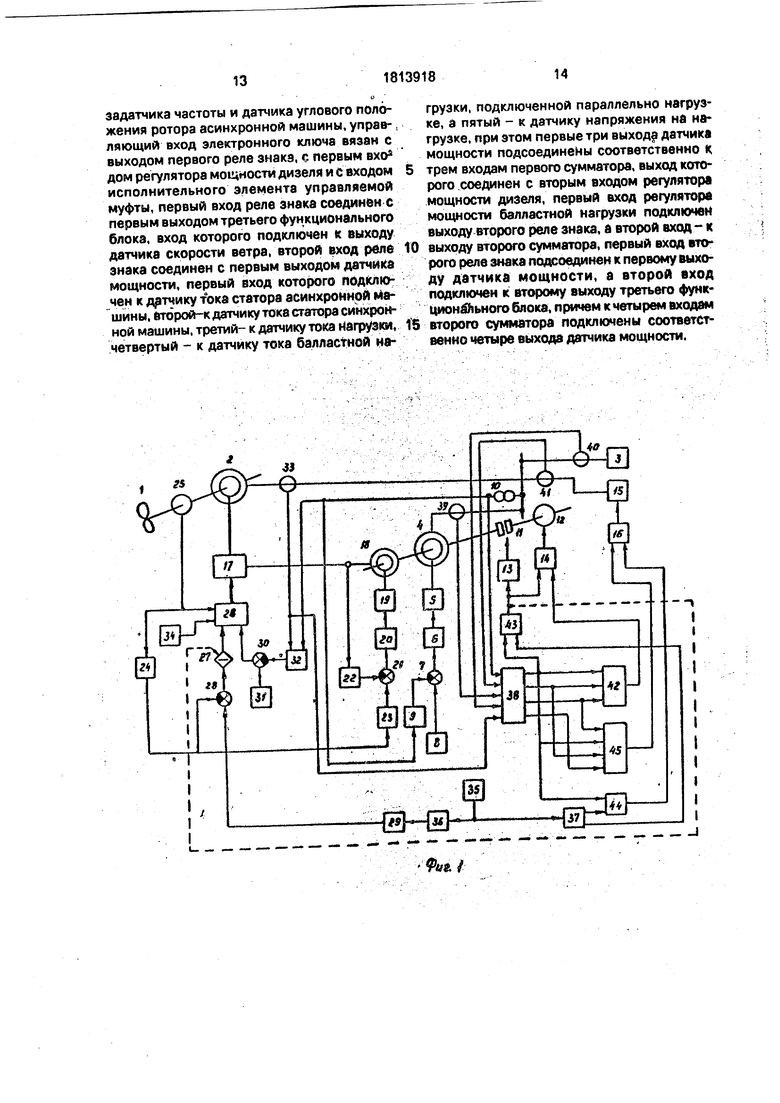
На фиг,1 представлена схема предлагаемого устройства, где обозначено: 1 - вет- роколесо; 2 - асинхронная машина (AM); 3 - нагрузка; 4 - синхронная машина (СМ); 5 - возбудитель; б - регулятор напряжения; 7 - первый элемент сравнения; 8 - датчик напряжения; 9 - датчик амплитуды напряжения; 10 - датчик напряжения; 11 - управляемая муфта; 12 - дизель; 13 - исполнительный элемент; 14 - регулятор мощности дизеля; 15-балластная нагрузка; 16- регулятор мощности балластной нагрузки; 17- преобразователь частоты; 18-вспомогательный синхронный генератора (ВС Г); 19
- возбудитель ВСГ; 20 - регулятор напряжения статора ВСГ; 2t - второй элемент сравнения; 22 - датчик амплитуды напряжения статора ВСГ; 23 - первый функциональный блок; 24 - датчик скольжения ротора AM; 25
-датчик углового положения ротора AM; 26
- система автоматического регулирования (САР); 27 - управляемый ключ; 28 - третий элемент сравнения; 29 - датчик оптимального скольжения; 30 - четвертый элемент сравнения; 31 - задатчик реактивной мощности; 32-датчик реактивной мощности; 33
- датчик тока статора AM; 34 - задатчик частоты; 35 - датчик скорости ветра; 36 - второй функциональный блок; 37 - третий функциональный блок; 38 -датчик тока скорости СГ; 40 - датчик тока нагрузки; 41 - датчик тока балластной нагрузки; 42 - первый сумматор; 43 - первое реле знака; 44 - второе реле знака; 45 - второй сумматор,
Ветродизельэлектрическая установка (фиг.1) включает в себя ветроколесо 1, на одном валу с которым расположена AM 2, к статорной обмотке которой параллельно подключены нагрузка 3 и статорная обмотка СМ 4, К обмотке возбуждения СМ 4 подключен возбудитель 5, управляющий вход которого соединен с выходом регулятора 6 напряжения, подводимого к нагрузке 3.
Вход регулятора 6 через первый элемент сравнения 7 связан с задатчиком 8 и датчиком 9 амплитуды напряжения, подведенного к нагрузке, при входу датчика 9
подключен выход датчика напряжения 10, вход которого подключен к шинам нагрузки 3.
К валу СМ 4 посредством управляемой муфты 11 может быть подключен дизель 12.
При этом включение муфты осуществляется посредством исполнительного элемента 13. Регулирование мощности дизеля 12 производится регулятором 14 мощности дизеля. Параллельно с нагрузкой 3 подключена
балластная нагрузка 15, мощность которой регулируется при помощи регулятора 16 мощности балластной нагрузки. К кольцам. ротора AM 2 подключен преобразователь частоты 17, силовой вход которого подсоединен к статорной обмотке ВСН 18, расположенного на одном валу с СМ 4. К обмотке ротора ВСГ 18 подключен возбудитель 19, управляющий вход которого соединен с выходом регулятора 20 напряжения статора
ВСГ 18. Вход регулятора 20 подсоединен к выходу второго элемента сравнения 21, первый вход которого связан с выходом датчика 22 амплитуды напряжения статора сравнения 21, первый вход которого связан с выходом датчика 22 амплитуды напряжения статора ВСН, при этом вход датчика 22 подключен к шинам ВСГ. Второй вход элемента сравнения 21 подключен к выходу первого функционального блока 23. Ко входу функционального блока 23 подсоединен выход датчика 24 скольжения ротора AM 2, при этом вход датчика 24 связан с выходом датчика 25 углового положения ротора, расположенного на одном валу с AM 2.
Управляющий вход преобразователя частоты 17 подключен к выходу САР 26, первый вход которой соединен с выходом управляемого ключа 27, вход которого через
третий элемент сравнения 28 связан с выходом датчика 24 скольжения ротора AM 2 и с выходом датчика 29 оптимального скольжения. Второй вход САР 26 через четвертый элемент сравнения 30 связан с задатчиком
31 и датчиком 32 реактивной мощности AM 2. При этом входы датчика 32 соединены с
выходами датчика 33 тока и датчика 10 напряжения статора AM 2.
Третий и четвертый входы САР 26 соединены с выходами задзтчика 34 частоты и датчика 25 положения ротора AM 2 соответ- ственно.
Датчик 35 скорости ветра соединен со входами второго 36 и третьего 37 функциональных блоков. Выход второго функционального блока 36 связан со входом датчика 29 оптимального скольжения.
Входы датчика мощности 38 подключены к выходам датчиков токов 33 - AM, 39 - СМ, 40 - нагрузки, 41 - балластной нагрузки и выходу датчика 10 напряжения на шинах нагрузки 3.
Первые три выхода датчика 38 мощности поступают на три соответствующих входа сумматора 42, выход которого соединен со вторым входом регулятора 14 мощности дизеля 12. Первый вход регулятора 14 и вход исполнительного элемента 13 подключены к выходу первого реле экрана 43, первый вход которого связан с первым выходом третьего функционального блока 37, а вто- рой вход с первым выходом датчика 38 мощности.
Первый регулятор 16 мощности балластной нагрузки 15 соединен с выходом второго реле знака 44, входы которого соединены с первым выходом датчика 38 мощности и вторым выходом третьего функционального блока 37. Второй вход регулятора 16 подключен к выходу сумматора 45, входы которого соединены соответственно со всеми четырьмя выходами регулятора мощности 38.
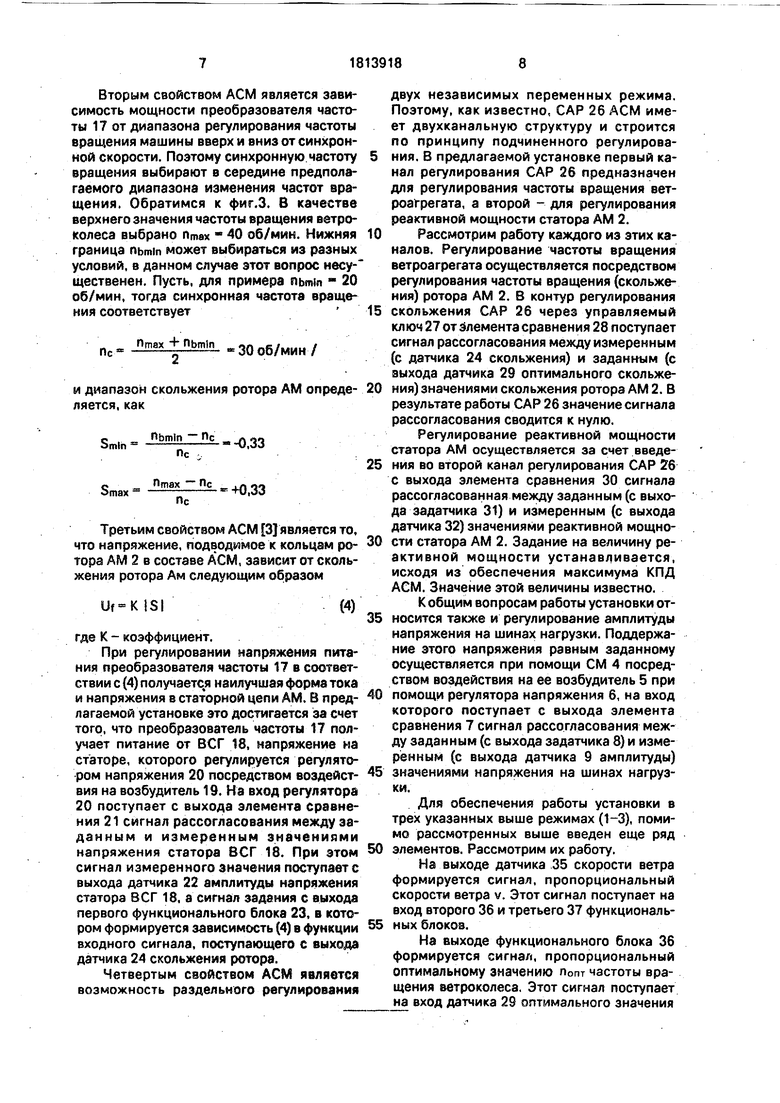
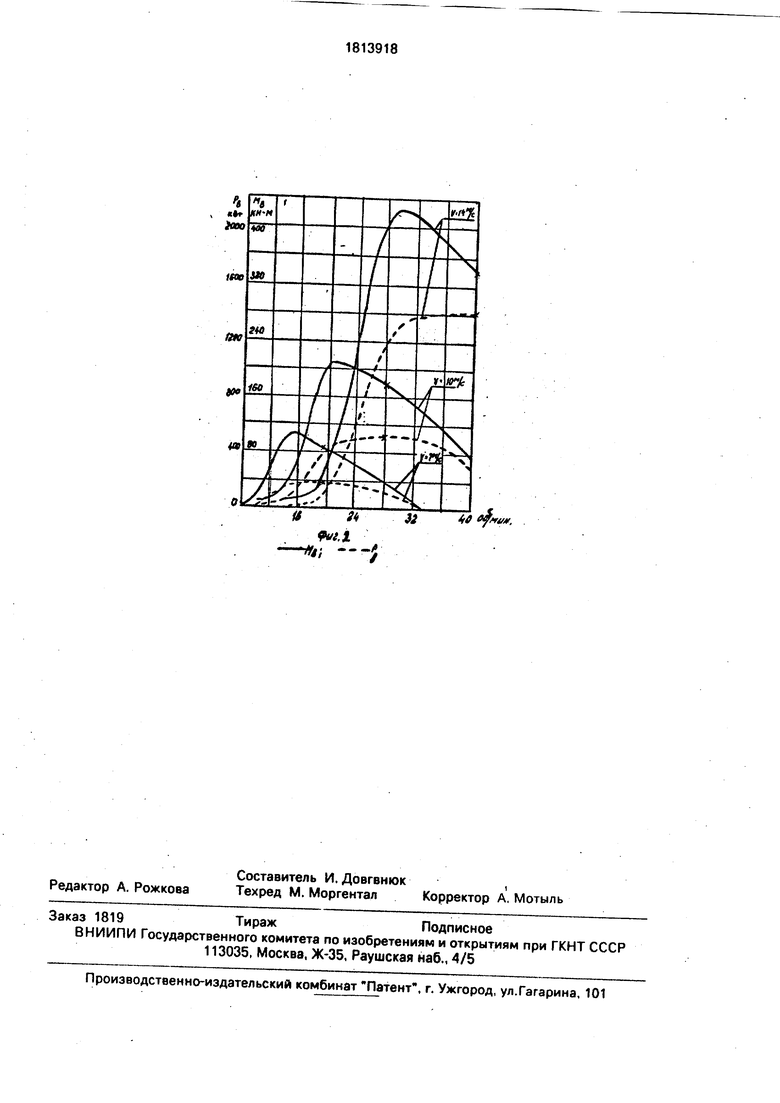
На фиг.2 представлены типичные зависимости момента М и мощности Р ветроко- леса в функции частоты его вращения п для трех различных значений скорости ветра у 7; 10; 14 м/с. Правая граница рабочих значений частоты вращения птах определяется механической прочностью ветроко- леса. Примем, для примера, - 40 об/мин.
Из рассмотрения фиг.З очевидно, что восходящая ветвь характеристики М(п) является неустойчивой, а ниспадающая - устойчивой.
Каждому значению v соответствует оптимальное значение частоты вращения п0пт из условий максимума мощности Р(л).
На фиг.З точки с оптимальной мощно- стью для каждой скорости ветра помечены на кривых М(п) и Р(п) крестиком. Из сказанного следует, что для каждой скорости ветра существует свое минимальное значение частоты вращения колеса nmin Попт. соответствующее максимуму мощности на зависимости Р(п).
Рассмотрим зависимости Р(п) и М(п) для v -10 м/с. Для этого случая п0пт 28 об/мин, Птах 40 об/мин. В этом диапазоне частот вращения мощность ветроколеса меняется от Ртах 510 кВт до Pmln 300 кВт.
Теперь можно сформулировать алгоритмы работы предлагаемой установки.
При мощности нагрузки Рн лежащих в пределах
Pmln Рн Ртах
0)
нагрузка получает питание только от энергии ветра, при этом баланс вырабатываемой и потребляемой энергии осуществляется за счет изменения частоты вращения ветроколеса в соответствии с его моментной характеристикой.
В диапазоне нагрузок
РН Ртах
(2)
нагрузка получает питание как от использования энергии ветра, так и от дополнительного источника - дизеля. При этом частоты вращения ветроколеса, поддерживается равной Попт для данной скорости ветра, что обеспечивает максимальное использование энергии ветра.
В диапазоне нагрузок
РН Pmln
(3)
скорость ветроколеса равна Птах, а избыток поступающей от ветроколеса энергии гасится в балластной нагрузке.
Прежде, чем рассмотреть работу установки в каждом из трех указанных выше режимов остановимся на некоторых общих моментах (см.фиг.1). В качестве генератора, преобразовывающего энергию ветра в электрическую в предлагаемой установке используется асинхронизированная синхронная машина (АСМ), состоящая в общем случае из асинхронной машины 2, преобразователя частоты 17, САР 26, датчика 25 углового положения ротора и помимо этого ряда элементов, обеспечивающих ее работу в конкретной установке.
Известно, что одним из основных свойств АСМ является то, что частота напряжения статорной обмотки AM 2 независимо от динамических переходных процессов постоянна и равна частоте сигнала, поступающего на третий вход САР 26. В данном случае источником такого сигнала является задатчик частоты 34.
Вторым свойством ACM является зависимость мощности преобразователя частоты 17 от диапазона регулирования частоты вращения машины вверх и вниз от синхронной скорости. Поэтому синхронную частоту вращения выбирают в середине предполагаемого диапазона изменения частот вращения. Обратимся к фиг.З. В качестве верхнего значения частоты вращения ветро- колеса выбрано nmax 40 об/мин. Нижняя граница ribmin может выбираться из разных условий, в данном случае этот вопрос несу- щественен. Пусть, для примера nbmin - 20 об/мин, тогда синхронная частота вращения соответствует
пс max ПЬт1п- -30об/мин-/
и диапазон скольжения ротора AM определяется, как
nbmln Пс
ПС .,.
Птах Пс Пс
--0,33
+0,33
Третьим свойством АСМ 3 является то, что напряжение, подводимое к кольцам ротора AM 2 в составе АСМ, зависит от скольжения ротора Ам следующим образом
(4)
где К - коэффициент.
При регулировании напряжения питания преобразователя частоты 17 в соответствии с (4) получается наилучшая форма тока и напряжения в статорной цепи AM. В предлагаемой установке это достигается за счет того, что преобразователь частоты 17 получает питание от ВСГ 18, напряжение на статоре, которого регулируется регулятором напряжения 20 посредством воздействия на возбудитель 19. На вход регулятора 20 поступает с выхода элемента сравнения 21 сигнал рассогласования между заданным и измеренным значениями напряжения статора ВСГ 18. При этом сигнал измеренного значения поступаете выхода датчика 22 амплитуды напряжения статора ВСГ 18, а сигнал задания с выхода первого функционального блока 23, в котором формируется зависимость (4) в функции входного сигнала, поступающего с выхода датчика 24 скольжения ротора.
Четвертым свойством АСМ является возможность раздельного регулирования
двух независимых переменных режима. Поэтому, как известно, САР 26 АСМ имеет двухканальную структуру и строится по принципу подчиненного регулирования. В предлагаемой установке первый канал регулирования САР 26 предназначен для регулирования частоты вращения вет- роагрегата, а второй - для регулирования реактивной мощности статора AM 2.
0 Рассмотрим работу каждого из этих каналов. Регулирование частоты вращения ветроагрегата осуществляется посредством регулирования частоты вращения (скольжения) ротора AM 2. В контур регулирования
5 скольжения САР 26 через управляемый ключ 27 от элемента сравнения 28 поступает сигнал рассогласования между измеренным (с датчика 24 скольжения) и заданным (с выхода датчика 29 оптимального скольже0 ния) значениями скольжения ротора AM 2. В результате работы САР 26 значение сигнала рассогласования сводится к нулю.
Регулирование реактивной мощности статора AM осуществляется за счет введе5 ния во второй канал регулирования САР 26 с выхода элемента сравнения 30 сигнала рассогласования между заданным (с выхода за датчика 31) и измеренным (с выхода датчика 32) значениями реактивной мощно0 сти статора AM 2. Задание на величину реактивной мощности устанавливается, исходя из обеспечения максимума КПД АСМ. Значение этой величины известно. К общим вопросам работы установки от5 носится также и регулирование амплитуды напряжения на шинах нагрузки. Поддержание этого напряжения равным заданному осуществляется при помощи СМ 4 посредством воздействия на ее возбудитель 5 при
0 помощи регулятора напряжения 6, на вход которого поступает с выхода элемента сравнения 7 сигнал рассогласования между заданным (с выхода задатчика 8) и измеренным (с выхода датчика 9 амплитуды)
5 значениями напряжения на шинах нагрузки.
Для обеспечения работы установки в трех указанных выше режимах (1-3), помимо рассмотренных выше введен еще ряд
0 элементов. Рассмотрим их работу.
На выходе датчика 35 скорости ветра формируется сигнал, пропорциональный скорости ветра v. Этот сигнал поступает на вход второго 36 и третьего 37 функциональ5 ных блоков.
На выходе функционального блока 36 формируется сигнал, пропорциональный оптимальному значению п0пт частоты вращения ветроколеса. Этот сигнал поступает на вход датчика 29 оптимального значения
91813918 10
скольжения, на выходе которого формиру- Per и РАМ- Под действием работы регулято- ется сигнал в соответствии с выражением: .. ра 14 мощности дизеля устанавливается
равновесие вырабатываемой и потреб л яе- о Попт псмой электроэнергии: 8опт --ъ-- 5
Рн ч- Per -I- РАМ - 0 .
На выходе функционального блока 27
формируются сигналы Ртах и Pmin, соответ-Сигнал с выхода реле знака 43 поступа- ствующие максимальной и минимальной ет также на управляющий вход ключа 27, в мощностям ветроколеса при данной скоро- 10 результате чего ключ 27 включается и персти ветра v, вый контур регулирования САР 26 - контур
Датчик мощности 38 предназначен для регулирования скольжения AM вступает в вычисления сигналов, пропорциональных работу. Работа этого контура описана вы- мощностям статора AM - РАМ, СГ - Per, ше. В результате скольжения ротора AM нагрузки -Рн. балластной нагрузки РБН. С 15 поддерживается равным оптимальному втой целью на вход датчика 38 поступают значению 50пт с вотроколеса снимается сигналы токов от датчиков 33,439, 40, 41 и максимально возможная мощность, датчика 10 напряжения. Рассмотрим работу установки, когда
Рассмотрим работу установки в трех значение мощности нагрузки Рн соответст- диапазонах значений мощности нагрузки 20 вует (3). В этом случае на выходе второго (1-3).реле знака 44 в соответствии с (6) формируПусть значение мощности нагрузки со- ется сигнал, так как Де 0. Под действием ответствует (1). В первом реле знака 43 оп- этого сигнала на регулятор 16 балластной ределяется знак разницы сигналовнагрузки поступает разрешение на начало
25 его работы. Регулирование величины подД1 Ртах-Рн. (5) ключаемой балластной нагрузки 15 осуще- ствляется регулятором 16, на вход которого
Так в рассматриваемом случае Ai S О, поступает сигнал с выхода второго суммато- на выходе реле знака 43 сигнал не выраба- ра 45. На вход сумматора 45 поступают сиг- тывается, и дизель не подключается. На.уп- 30 налы РАМ, Per, Рн, РБН. Действие регулятора равляющий вход ключа 27 сигнал также не 16 продолжается до тех пор, пока не устано- поступает.. вится равновесие
На выходе второго реле знака 44 определяется знак разницы Рн + РАМ + Per + РБН 0 35
Д2 Рн-Рт1п.(6) Исполнение САР 26, преобразователя
частоты 17 и датчика 24 скольжения ротора
Поскольку в рассматриваемом случае AM и задатчика 34 частоты известно. Дг 0, то сигнал на выходе реле знака 44 неДатчик 25 углового положения может вырабатывается, нет сигнала на разреше- 40 быть выполнен разными способами, напри- ние работы регулятора 16 балластной на- мер, на базе маломощной синхронной ма- /грузки и балластная нагрузка не шины либо, как статическое устройство, подключается. Все остальные элементы ус- позволяющее косвенно получить информа- тановки работают так, как было описано вы- Пию о частоте вращения ротора AM 2 на ше 45 основе измерений параметров режима стаПусть значение мощности нагрузки со- тора и ротора машины 4. ответствует (2). В этом случае, согласно (5), - В датчике 32 реактивной мощности и в величина Ai 0 и на выходе реле знака 43 датчике 38 мощности получают сигналы появляется сигнал. Этот сигнал воздейству- мощностей на базе известных преобразова- ет на исполнительный элемент 13, в реэуль- 50 ний токов и напряжений, поступающих на тате чего управляемая муфта 11 включается входы датчиков.
и дизель подключается к валу СМ. Сигнал сЗадатчик 31 реактивной мощности и за- выхода реле знака 43 поступает также на датчик 8 напряжения выполняются в виде вход регулятора мощности дизеля 14 и дает датчика аналогового сигнала, разрешение на начало его работы. Управле- 55 Датчик 35 скорости ветра выполняется ние регулятором 14 мощности дизеля осу- известным способом, ществляется под действием сигнала, Возбудители 5, 19 и регуляторы 6, 20 поступающего с выхода сумматора 42. На выполняются по известным техническим ре- вход сумматора 42 поступают сигналы Рн, шениям.
Сумматоры 42, 45 выполняются известным способом. Элементы сравнения 7, 21, 28, 30 и датчик 29 оптимального скольжения могут быть выполнены на базе сумматоров.
Управляемый ключ 27 может быть выполнен в виде аналогового ключа серии К590.
В датчиках амплитуды напряжения 9,22 получают сигналы, пропорциональные амплитуде подведенного к ним напряжения переменной частоты на базе известных преобразований.
Датчики токов 33,39,40,41 выполняются на основе измерительных трансформаторов тока, а датчик напряжения 10 - на базе измерительных трансформаторов напряжения.
Функциональные блоки 23, 36, 37 могут выполняться на основе известных функциональных преобразователей.
Устройство дизеля 12 с управляемой муфтой 11, исполнительным элементом 13 и регулятором мощности 14 описано.
Устройство балластной нагрузки 15 и регулятора 16 известно.
Таким образом, подключение к кольцам ротора AM преобразователя частоты позволило повысить качество выдаваемой установкой электроэнергий путем точного поддержания частоты генерируемого напряжения, равной заданному значению, что было невозможно в устройстве-прототипе. Предлагаемая установка может быть использована для гарантированного электроснабжения потребителей.
Формула изобретения
Ветродизельэлектрическая установка, содержащая ветроколесо, асинхронную электрическую машину, расположенную на одном валу с ветроколесом, дизель с регулятором мощности, синхронную электрическую машину, вал которой соединён с валом дизеля через управляемую муфту, нагрузку, подключенную к статорной обмотке синхронной машины, возбудитель, первый элемент сравнения, регулятор напряжения, вход которого соединен с выходом первого элемента сравнения, а выходчерез возбудитель подключен к обмотке возбуждения синхронной машины причем один вход первого элемента сравнения соединения сдатчиком напряжения на нагрузке, а другой - с задат- чиком напряжения, от л ича ющаясятем, что, с целью повышения качества вырабатываемой электроэнергии, в нее введены преобразователь частоты, система автоматического регулирования, вспомогательный генератор, балластная нагрузка, регулятор мощности балластной нагрузки.
регулятор напряжения генератора, три функциональных блока, датчики амплитуды напряжения статора вспомогательного генератора, скольжения ротора асинхронной машины, углового положения ротора асинхронной машины, оптимального скольжения, реактивной мощности, тока статора асинхронной машины, скорости ветра, мощности, тока статора синхронной машины,
0 тока нагрузки и тока балластной нагрузки, задатчики реактивной мощности и частоты, второй, третий и четвертый элементы сравнения, управляемый электронный ключ, два сумматора, два реле знака и исполни5 тельный элемент, при этом преобразователь частоты подключен к кольцам ротора асинхронной машины, силовой вход преобразователя частоты подсоединен к статор- ной обмотке вспомогательного генератора,
0 расположенного на одном валу с синх- ронной машиной, к обмотке ротора вспомогательного генератора подключен возбудитель вспомогательного генератора, управляющий вход которого соединен
5 с выходом регулятора напряжения статора вспомогательного генератора, вход которого через второй элемент сравнения связан с выходом датчика амплитуды напряжения статора вспомогательного генератора, при0 чем вход последнего датчика подключен к зажимам статора вспомогательного генератора, второй вход второго элемента сравнения связан с выходом первого функционального блока, к входу которого подсо5 единен выход датчика скольжения ротора асинхронной машины, вход которого подключен к выходу датчика углового положения ротора асинхронной машины, расположенного на одном валу с послед0 ней, управляющий вход преобразователя частоты подключен к выходу системы автоматического регулирования, первый вход которой соединен с выходом управляемого электронного ключа, вход которого через
5 третий элемент сравнения связан с выходом датчика скольжения асинхронной машины и с выходом датчика оптимального скольжения, вход которого подключен к выходу второго функционального блока, при этом вход
0 последнего подсоединен к выходу датчика - скорости ветра, второй вход системы автоматического регулирования через четвертый элемент сравнения связан с задатчиком реактивной мощности асинхронной маши5 ны и с датчиком реактивной мощности асин- хронной машины, входы которого подключен к датчикам тока и напряжения статора асинхронной машины, третий и четвертый входы системы автоматического регулирования соединены с выходами
за датчика частоты и датчика углового положения ротора асинхронной машины, управляющий вход электронного ключа вязан с выходом первого реле знака, с первым вхо дом регулятора мощности дизеля и с входом исполнительного элемента управляемой муфты, первый вход реле знака соединен с первым выходом третьего функционального блока, вход которого подключен к выходу датчика скорости ветра/второй вход реле знака соединен с первым выходом датчика мощности, первый вход которого подключен к датчику тока статора асинхронной Машины, второй-к датчику тока статора синхронной машины, третий- к датчику тока Нагрузки, четвертый - к датчику тока балластной на0
грузки, подключенной параллельно нагрузке, а пятый - к датчику напряжения на на грузке, при этом первые три выхода датчика мощности подсоединены соответственно к. трем входам первого сумматора, выход которого соединен с вторым входом регулятора мощности дизеля, первый вход регулятора мощности балластной нагрузки подключен выходу второго реле знака, а второй вход- к выходу второго сумматора, первый вход второго реле знака подсоединен к первому выходу датчика мощности, а второй вход подключен к второму выходу третьего функ- ционйльного блока, причем к четырем входам второго сумматора подключены соответственно четыре выхода датчика мощности.
9ut,JL , --}
