Изобретение относится к устройству корабля, в частности к приборам контроля остойчивости, и может быть использовано для определения остойчивости свободно плавающего корабля.
Целью изобретения является повышение точности определения фактической остойчивости корабля за счет решения системы уравнений центра тяжести аварийного корабля.
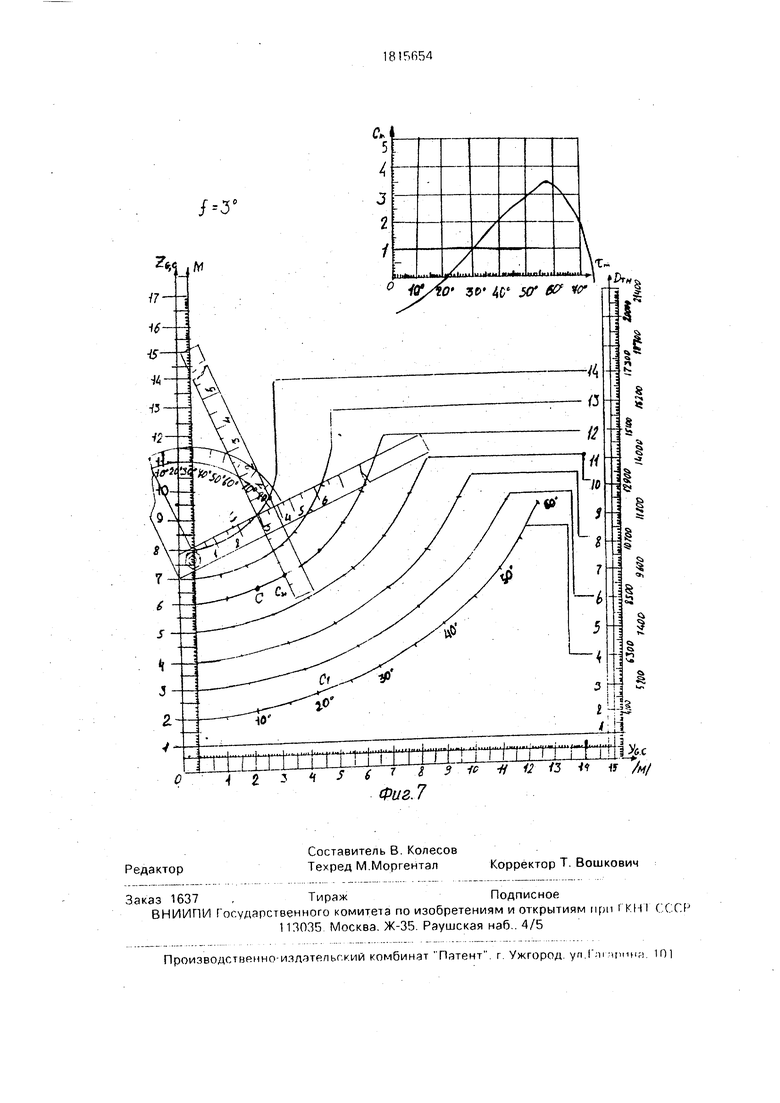
На фиг.1 показана статическая остойчивость аварийного корабля; на фиг.2 - графики кривых центра величины: на фиг.З - движение корабля на волне: на фиг.4 - остойчивость аварийного корабля при качке: на фиг.5 - прибор для определения остойчивости; на фиг.6 - построение диаграммы остойчивости с использованием прибора; на фиг.7 - построение диаграммы статической остойчивости с использованием прибора
При технической характеристике предложенного прибора, поскольку основой решения задачи по определению остойчивости служат новые, неизвестные до сего времени уравнения координат центра тяжести корабля, целесообразно вначале рассмотреть теоретическое обоснование устройства прибора на примере аварийного корабля.
В качестве аварийного корабля рассматривается корабль, на котором в результате пробоин в корпусе затоплен один или несколько отсеков, произошло смещение груза, образовались угол крена и угол дифферента. Особенности остойчивости аварийного корабля, определения плеча остойчивости при больших углах наклонения заключаются в скоротечности изменения весовой нагрузки и посадки корабля, образовании значительных свободных поверхностей, Определение плеча неразрывно связано с решением уравнений координат центра тяжести G и центра величины С корабля.
оо
ел о ел
Јь
Решение известных уравнений координат центра тяжести и центра величины корабля методами приема груза и
постоянного водоизмещения (1)
2L PiV.
ZG
1
I n
2 Pizi
o
- n
Д ViYl
1
I n
zc у 2
V 1-0.
требует знания составляющих весовой нагрузки Pi, составляющих объема Л и координат их центров тяжести YI, Zi. Определить же точное значение веса воды PI или объема воды Vi в затопленных отсеках и координаты их центров тяжести YI, Zi в экстремальных, аварийных условиях практически невозможно. В технической документации корабля указываются объем Л и координаты центров тяжести отсеков. Но решение уравнений посредством включения веса целых отсеков воды или исключения объемов целых отсеков, независимо от степени их фактического затопления, сопряжено с просчетами в оценке фактической остойчивости.
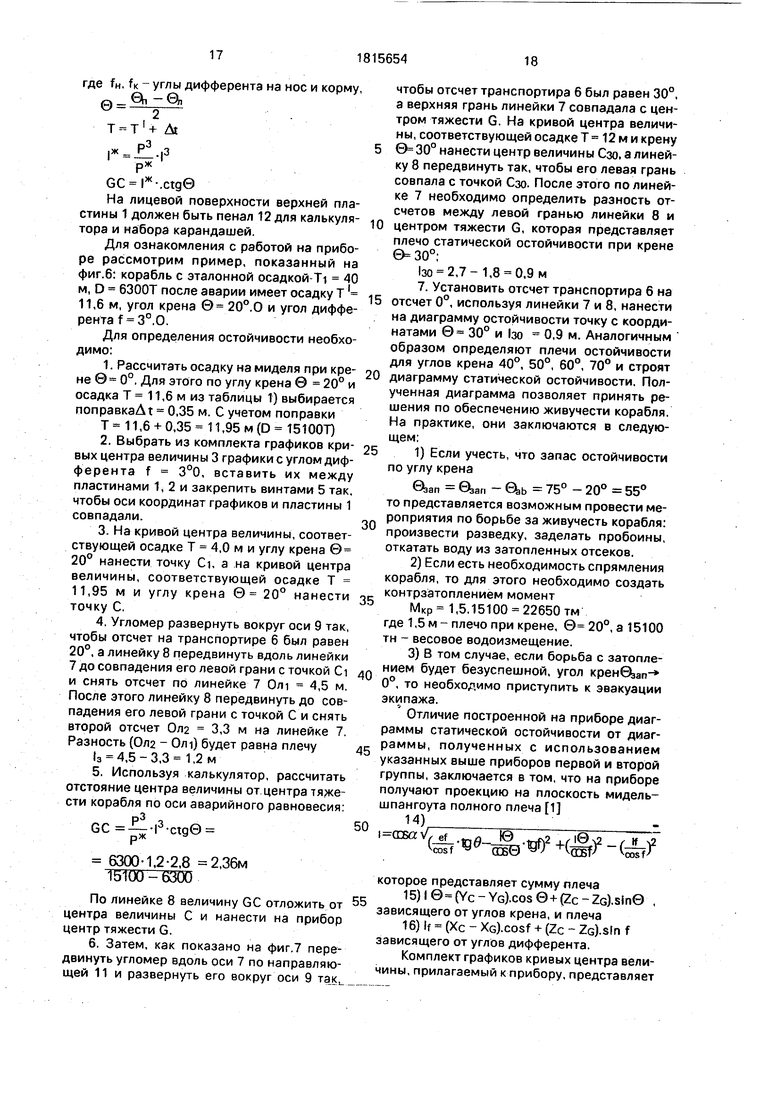
Статическая остойчивость аварийного корабля.
Находящиеся в затопленных отсеках грузы, оборудование подвержены гидродинамическому давлению масс воды при наклонениях корабля, обретают определенную плавучесть. Смоченные поверхности уменьшают трение между частями груза и корпусом корабля. Действие указанных факторов при наклонениях корабля приводит к смещению груза. Часть затопленного груза может представлять собой аморфную, подвижную массу с различ- ным удельным весом и габаритом вкраплений в отдельно взятых объемах. Понятие подвижности, аморфности груза в за- топленных отсеках относительное, не всякий груз при наклонениях будет смещаться. В полностью заполненном грузом отсеке при затоплении смещения вообще не может быть. Сохраняют свои места и надежно закрепленные грузы. Однако наличие жидкого (аморфного) груза в затопленном отсеке всегда будет иметь место. Как крайний случай, это - груз в виде забортной воды, находящейся в просветах между закрепленным грузом. Количество этой воды зависит от коэффициента проницаемости груза fi.
Наличие жидкого груза позволяет представить весовую нагрузку аварийного корабля Р как сумму двух составляющих:
р рэ + рж
где Р3 - вес закрепленного груза, Рж - вес жидкого груза.
На фиг.1 показано сечение корабля по миделю и обозначены при угле крена 0 0°; G° - центр тяжести корабля; 60Ж - центр
тяжести жидкого груза; Go3 - центр тяжести закрепленногоjpyaa; РЖ - вектор силы веса жидкого груза; Р вектор силы веса закрепленного груза, Р Р3 + - вектор силы весового водоизмещения после аварии, DI
- -р - вектор силы весового водоизмещения до аварии; Ti - осадка корабля до аварии, Т - осадка корабля после аварии, С01 - центр величины при осадке TI и весовом водоизмещении DI, Со - центр величины
при осадке Т и весовом водоизмещении D;
F, FI - центры тяжести ватерлиний WL,
WiLi; Ti - осадка на миделя при крене 0.
Предположим, что под воздействием
волны корабль накренился на угол 0 . При
том часть закрепленного прежде груза Р3, вследствие вышеуказанных факторов, может обрести качества жидкого груза, что вызовет уменьшение величины Р3 и изменение координат центра тяжести закрепленного
груза. Увеличившийся жидкий груз Рж, как подвешенное тело, переместится в сторону крена. Может иметь место и частный случай: величина груза Р3 и координаты его центра тяжести останутся неизменными. На фиг.1
рассматривается общий случай, когда центры тяжести закрепленного груза Р3, жидкого груза Рж переместились из точек G03,60Ж в точки Gi3, Gim, соответственно. При этом вектора сил Рэ, Рж будут взаимно параллельны, перпендикулярны ватерлиниям WL, WiLi, которые соответствуют водоизмеще- ниям D, DL С образованием угла крена © координаты центра тяжести корабля
YG
ZG
рЗ-У3 + Рж-Уж. рз + р рз.2з + рж.гж
Р3 + Рж
где Yi3, Yi. Zi3, Zi5 - координаты центров тяжести жидкого и закрепленного грузов. Согласно теореме теоретической механики (3) точка G будет являться точкой приложения равнодействующей силы Р (центром тяжести корабля), если точки приложения Gi3, 61 составляющих параллельных сил Р3. Рж будут находиться на одной прямой с центром тяжести корабля G, а отношение отрезков Gi3G, прямой. С13б1ж будет соответствовать пропорции
1)
G}G
GfG PJ
Следует подчеркнуть, что изменяя угол, через центр тяжести G можно провести бес- конечное множество прямых, которые пересекутся с параллельными линиями действия сил Рэ и Рж в точках, отстояние которых от точки G будет соответствовать пропорции 1). Очевидно, что отрезки G3G, СЖС- вертика- ли 63СЖ, проведенной через точку G параллельно оси Z, будут также относиться в соответствии с пропорцией 1). При этом плечи G23G С2Ж6 сил Р3 и Рж относительно оси, проходящей через центр тяжести G и центр величины С, будут являться постоянными величинами, независимо от точек приложения сил Р3 и Рж согласно пропорции 1).
Если пропорция 1) является одним условием, то уравнение равновесия (1)корабля с креном
в-Ј3. .
составляет другое условие оценки остойчивости корабля. Согласно уравнению равно- весия 2) вектор силы весового водоизмещения D, точкой приложения которого должен служить центр величины С с координатами Yc, 2с, расположенный на линии действия вектора силы весовой нагруз- ки Р, можно представить как сумму
P
где DI -Р3 - вектор силы весового водоизмещения при весовой нагрузке корабля Р3, точкой приложения которого является точка Ci, находящаяся на линии действия вектора .силы Р , а А 5 -Рж - вектор силы дополнительного весового водоизмещения с точкой приложения С2, находящейся на линии действия вектора силы Рж. Очевидно, что точка Ci приложения вектора силы Di является точкой кривой центра величины Co1Ci, при водоизмещении Di, осадке Тч, крена 0, ватерлинии , а точка С - точка приложения вектора силы D является точкой кри- вой центра величины С0С при водоизмещении D, осадке Т, крене в, ватерлинии WL.
Если через точку С провести перпендикулярно линиям действия сил Р3, Рж, D, A D прямую до пересечения с ними в точках , то получим плечи ж, I3 сил A D, Di относительно оси GC, отношение которых
3) ж СЖ6 |3 пЗп
Di
:Ш
G°G P Эти пропорции можно представить равенства моментов 3-Di
(Ж.рЖ |3.рЗ
5 Q с
20
25 зо
5 0 5
0
5
сумма которых
1Ж-ДО + Ж-РЖ + 13-01 + 13-РЭ 0 Равенство моментов сил относительно оси GC нулю, как и уравнение равновесия 2), говорят о том, что линия действия сил GC - ось аварийного равновесия корабля, что
Yc - YG 1Ж GC
tg©
Zc-Zc
Если предположить, что отрезок GG5 вертикали 63СЖ, отстояние центра величины от центра тяжести GC на оси аварийного равновесия и плечо 1Ж не будут являться сторонами треугольника GGXC, вершинами которого служат центр тяжести G и центр величины корабля С, то это приведет к нарушению пропорции 3) или уравнения равновесия 2).
Таким образом, для определения координат центра тяжести корабля необходимо и достаточно совместно решить пропорцию 3) и уравнение равновесия 2). Исходными данными для совместного решения пропорции 3) и уравнения (2) должны служить силы D, Dt, угол крена 0 и координаты Yc. Zc центра величины С.
Учитывая, что фактическое значение средней осадки Ti, водоизмещение Di корабля до аварий всегда известно, используя графики кривых центра величины, можно определить координаты центра величины Ci для любых углов наклонения. Полагая, что корабль оснащен средствами измерения углов наклонения и осадки, для определения координат Yc, Zc центра величины С, водоизмещения D необходимо определить среднюю осадку Т1 и угол крена ©после аварии,
Поскольку грузовая шкала рассчитывается для посадки корабля прямо, то для определения осадки Т на миделе, водоизмещения необходимо вводить поправку согласно формуле (1}
г1
T T + Yf.где Т1 - измеренная осадка при крене ° на миделе,
Yf - ордината центра тяжести действующей ватерлинии.
Зная осадку Т. по грузовой шкале и графикам кривых центра величины можно определить величину водоизмещения Г и координаты Yc, Zc центра величины С.
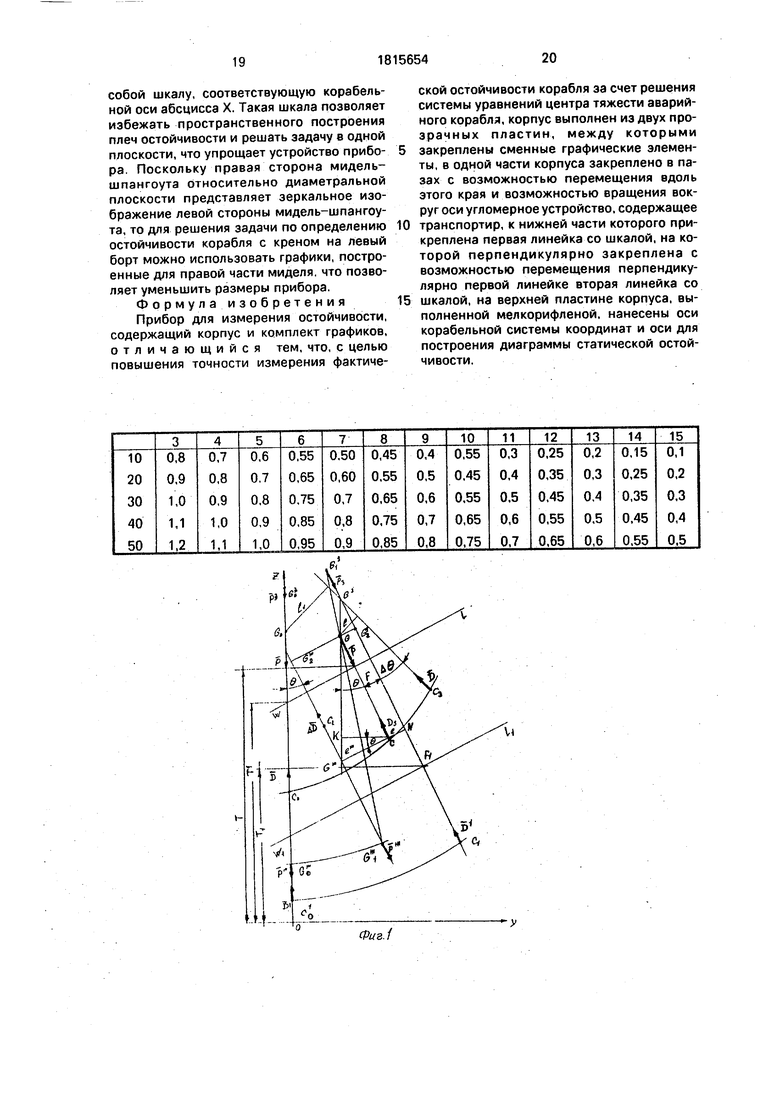
Поправка At Yf-.tg© , как и кривые центра величины, должна быть предвычис- лена как функция двух переменных- осадки Т1, угла крена 0 и нанесена в виде таблицы на графиках кривых центра величины (фиг.2).
Определив значения водоизмещении до и после аварии, найдем
АО 0-О1 .
Для оперативного определения координат центра величины необходимо предвари- тельно, известным в теории корабля способом, построить кривые центра величины для всех возможных посадок корабля. Предвычисленные координаты центра величины в зависимости от средней осадки Т, угла крена 0 и угла дифферента f должно осуществляться в пределах
Tmln - Т Ss Tmax
-fmin - f Tmax
В приведенных неравенствах Tmin .-. осадка порожнем, Tmax - осадка по предельную линию погружения, обеспечивающую запас аварийной плавучести; f max - угол дифферента, при котором осадка штевня совпадает с предельной линией погружения. Чтобы обеспечить принятую на практике точность решения, интервалы предвычислений между соседними значениями по осадке должны соответствовать точности грузовой шкалы (10 см), а интерва- лы по углу крена- 10°. Учитывая малое влияние дифферента на изменение координат центра величины, интервалы между соседними значениями по углу дифферента должны быть такими, чтобы .точность определения координат центра величины С была не ниже 0,01 м. Для большей наглядности решения задачи по оценке остойчиво сти аварийного корабля вначале используем графический способ. Графическое решение заключается в построении вертикали С3Ожсогласно пропорции 3) и оси аварийного равновесия согласно уравнения 2). Чтобы построить вертикаль 636Ж необходимо через найденные точки С и Ci кривых центра величины СоС и Co1Ci для корабля с осадками Т и Ti при угле крена 0 и угле дифферента f провести линии действия сил D, Р, Di.Pi.
Провести через точку С линию СЖЫ. Замерить плечд43 и найти плечо
Iя
Рз - -Г
рЖ
Через точку Сж провести параллельно оси Z прямую которая будет представлять вертикаль СЖС3.
Если в дополнении к произведенному построению из точки С опустить перпендикуляр С К на вертикаль СЖ63, то получим треугольник CKG, который будет представлять графическое решение уравнения (2), а сторона треугольника GC будет являться осью аварийного равновесия. Точка G пересечения вертикали GXG3 с осью аварийного равновесия GC является единственным действительным совместным решением про0
порции 3), уравнения (2) и представляет собой центр тяжести аварийного корабля.
Для аналитического совместного решения пропорции 3} и уравнения (2) достаточно значения плеча ж выразить через разность ординат точек CG. Из треугольника СЖКС следует, что
Р3 , Ус-Уб 1ж.-соз0 3-.cos©
рЖ
Подставив значения (Yc - YG) в уравнение (2), получим
рз ZG-ZC -- I3 .cos0- .ctg©
рж
Если решить два последних уравнения относительно координат центра.тяжести, то
рЗ рж
4) YG Yc- - rr-lVcos©
5) ZG ZC +
-Р
рЖ
I3.cos 0- .etc
5
0
5
0
5
0
5
оо и решение уравнения
При ctg 1 5) невозможно.
Следовательно, и координаты центра тяжести корабля при рассматриваемым методом определить нельзя. Учитывая незначительные изменения cos 0 при малых углах, уравнения 4) и 5) следует использовать при углах крена не менее 5°.
Необходимо отметить, что остойчивость аварийного корабля, как это следует из уравнения равновесия (2), характеризуется тем, что центр тяжести G и центр величины С корабля находятся на оси аварийного равновесия, что исключает существование плеча остойчивости относительно этой оси. Восстанавливающий момент и равный ему кренящий момент
Mz I.-D Мкр
образуются в том случае, если в результате воздействия внешних сил корабль изменит угол крена на величину А0, а центр величины переместится в точку С3. Восстанавливающий и кренящий моменты без учета перемещения центра тяжести корабля G
Мв1 1г.О М1кр
Разности восстанавливающих и кренящих моментов, плеч остойчивости
АМ8 Me1 - MB D(IH) м кр - Мкр являются следствием смещением груза и определяют часть утраченной остойчивости корабля. Поэтому диаграмма остойчивости Рида для аварийного корабля должна быть смещена от начала координат О на величину аварийного крена ©аь Построить диаграмму статической остойчивости и оперативно оценить статическую остойчивость аварийного корабля возможно, если иметь (фиг.2) графики с кривыми центра величины, построенными с учетом всех трех элементов посадки корабля. Графики должны быть построены в системе координат Z0y. На графиках наносятся шкалы средних осадок Т, соответствующих водоизмещении D. аппликаты ZG, Zc центра тяжести G и центра величины С. По оси Y откладываются ординаты центра тяжести и центра величины YG, YC. Для обеспечения необходимой точности график строится в масштабе, который позволяет нанести деления на осях координат с ценой не менее 0,01 м соответствующей цене грузовой шкалы. Каждая кривая центра величины должна быть разбита по углам крена с ценой деления 1°, соответствующей цене деления кренометра.
На графиках должны быть линии, которые соединяют точки на шкалах осадок Т, водоизмещении D и соответствующие им кривые центра величины. Решение задачи по оценке остойчивости на графике заключается в следующем:
1. По замеренным осадке Т и углу крена© из таблицы выбирается поправка At и определяется осадка
Т - Т1 + AT
2. По аргументам Т, 0, f, Ti наносятся координаты центра величины С и d. Через них проводятся прямые под углом крена © к оси Z. Замеряется плечо I3.
3. Определяется плечо
.|3-.cos0
рЖ
и наносится точка Сж. Проведя через точку G вертикаль до пересечения с осью аварийного равновесия GC, получим в пересечении вертикали с аварийной осью равновесия центр тяжести G.
4. Последовательно увеличивая 0 на 10°, проводятся соответствующие радиусы кривизны кривой центра величины для осадки Т. Замерив кратчайшие расстояния от точки G до проведенных радиусов кривизны, получаем плечи статической остойчивости I). По значениям плеч строится диаграмма статической остойчивости. Особенности плеч и диаграммы остойчивости аварийного корабля рассматриваются при обосновании определения остойчивости при качке.
Остойчивость аварийного корабля при качке.
В теории качки корабля гидродинамические силы, действующие на корабль, делятся на три категории: восстанавливающие, инерционно-демпфирующие и возмущающие. В результате действия всех перечисленных сил корабль на волнении
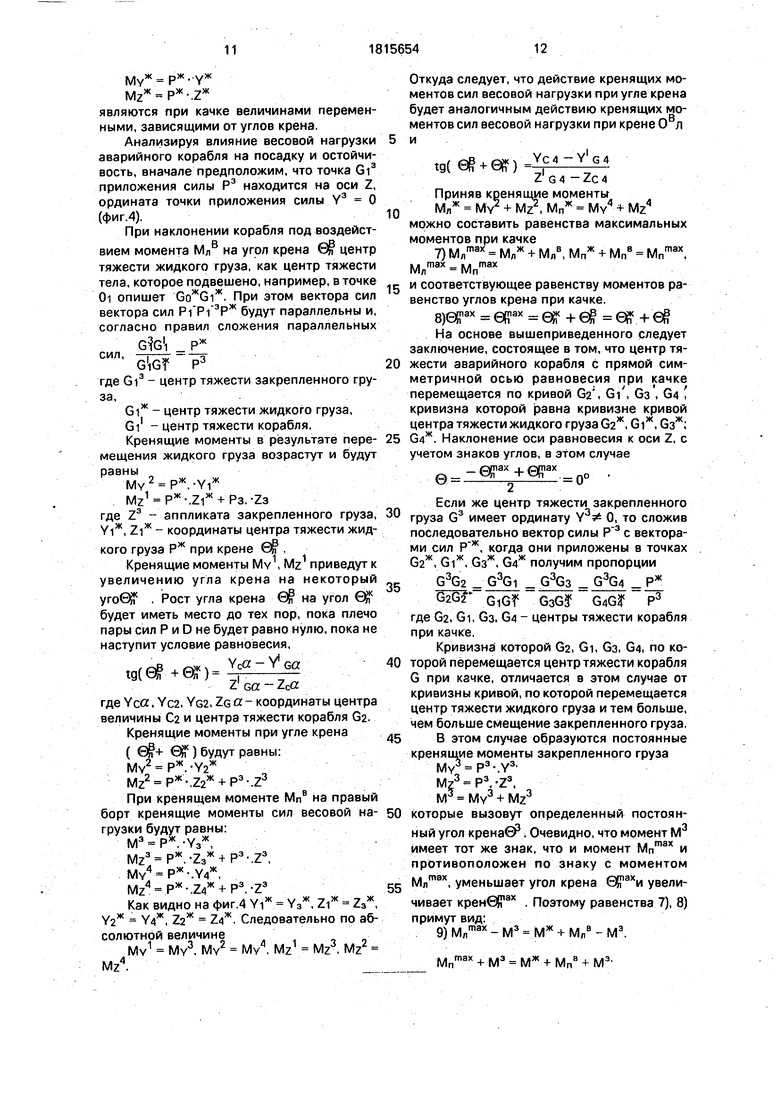
периодически изменяет величину и форму погруженной части. Та.ким образом, о действии сил можно судить по изменению посадки корабля на волнении.
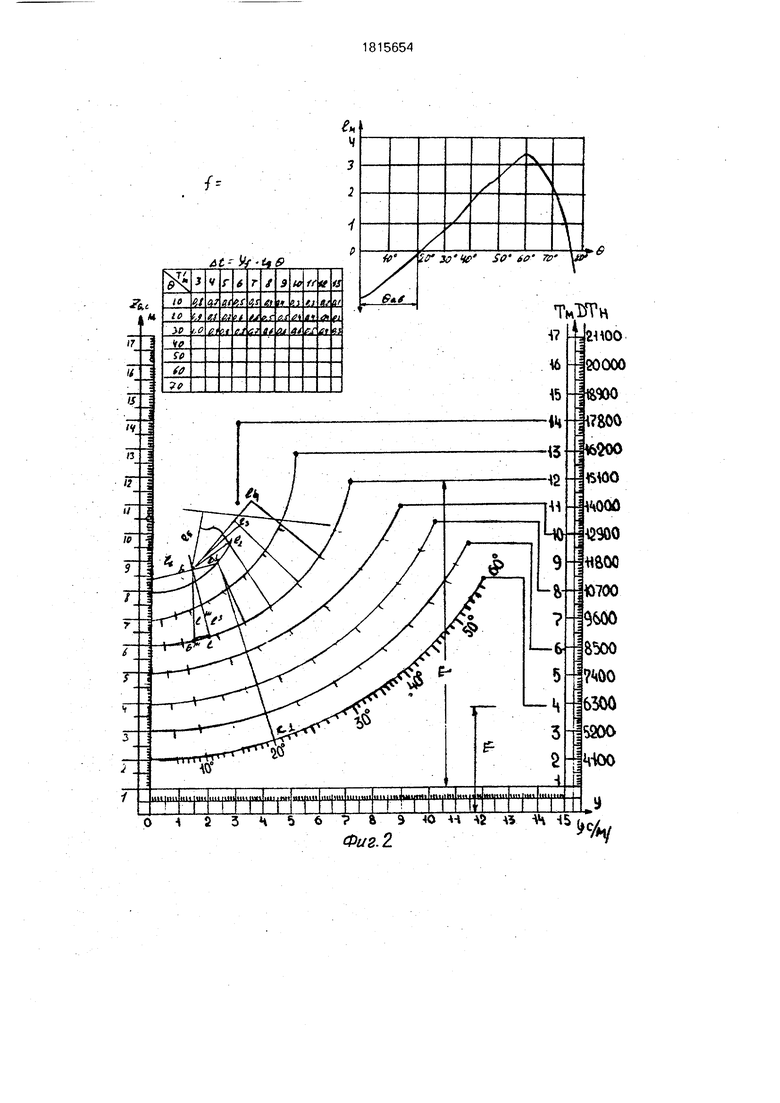
Для определения посадки корабля на волнении рассмотрен случай качки корабля, расположенного к волне лагом. Согласно теории колебаний движение корабля в этом случае определяется дифференциальными
уравнениями (4). Движение корабля относительно неподвижной системы координат , в соответствии с дифференциальными уравнениями, показано на фиг.З: корабль с осадкой Т совершает линейные
колебания относительно оси /, совпадающей с плоскостью горизонта и качается относительно оси Ј , совпадающей с линией отвеса.
Корабль и связанная с ним подвижная
система координат YOZ, в результате волнения, двигаются по косинусоиде.
При фазах ноль и побразуются максимальные углы крена 0 ,0П на левый и
правый борт. При фазах волны я /2 и 3/4я
угол крена © 0°. И наоборот, максимальные значения величин Јmax - Јmin линейных колебаний будут при фазах я /2 и 3/4.7Г , а при фазах ноль и л:значение Ј 0. Необходимо подчеркнуть, что кренящие моменты Мв при качке корабля, а следовательно и углы крена О8 , образуются не в результате поперечного перемещения груза, а за счет периодического изменения действующей ватерлинии, перемещения центра величины корабля С в зависимости от углов крена:
если центр тяжести корабля G находится на оси Z, то значение кренящего момента при качке будет определяться по формуле
MB D.I P.I.
В отличие от неповрежденного корабля с осадкой Т, водоизмещением D, не имёю- щего жидкого груза Рж, на аварийный корабль того же водоизмещения и с той же осадкой кренящие моменты сил весовой нагрузки относительно осей подвижной системы координат будут равны„ 6) MY (Р3 + P)-.YG P3-.Y3 + Рж. -Y
Mz (Р3 + Рж). -ZG P3Z3 + Рж -.Z где Y3, Y, YG, Z3,Z,ZG - координаты центров тяжести корабля, закрепленного и жидкого груза. Крепящие моменты Mv3 P3-.Y3
Mz3 P3. Z3
являются постоянными, не зависящими от углов крена величинами.
Моменты же силы веса жидкого груза
сил,
..уЖ
М2ж рж.2ж
являются при качке величинами переменными, зависящими от углов крена.
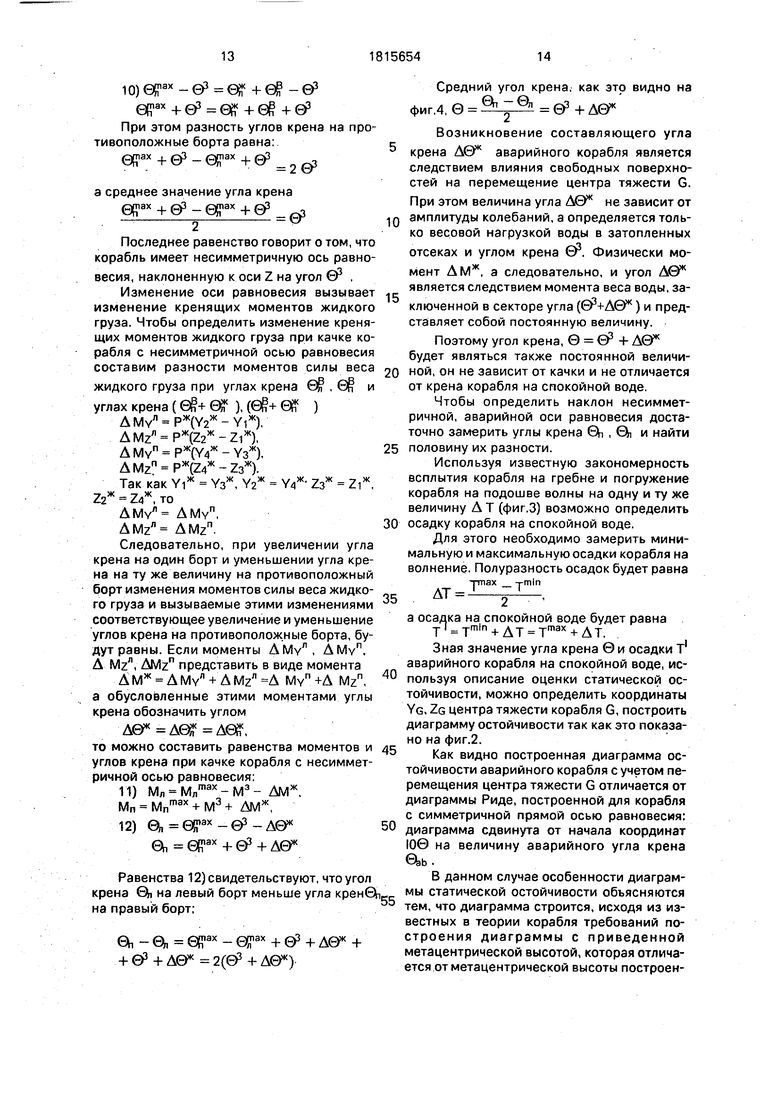
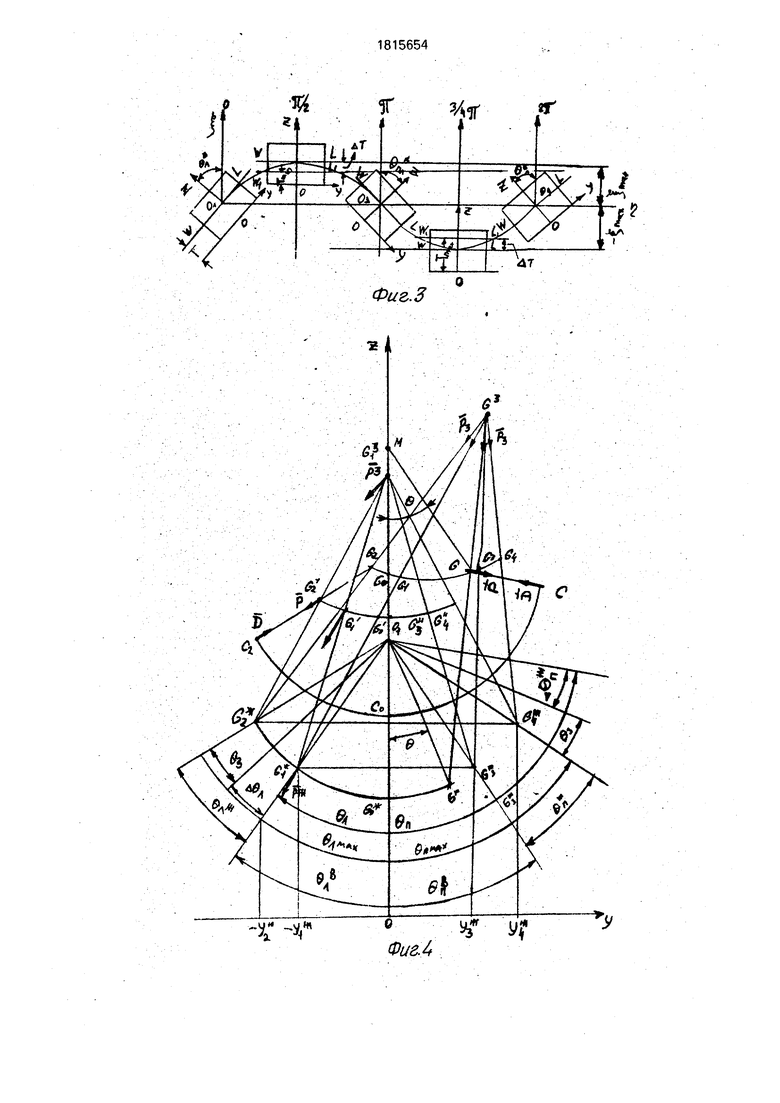
Анализируя влияние весовой нагрузки аварийного корабля на посадку и остойчивость, вначале предположим, что точка Gi3 приложения силы Р3 находится на оси Z, ордината точки приложения силы Y3 О (фиг.4).
При наклонении корабля под воздействием момента Млв на угол крена 6е центр тяжести жидкого груза, как центр тяжести тела, которое подвешено, например, в точке От опишет Сожб1ж. При этом вектора сил вектора сил будут параллельны и, согласно правил сложения параллельных
Gfc i Рж
G lGf Р3 где Gi3 - центр тяжести закрепленного груза,
61Ж - центр тяжести жидкого груза,
Gi1 - центр тяжести корабля.
Кренящие моменты в результате пере- мещения жидкого груза возрастут и будут равны
Му2 Рж. У1ж . Мг1 Рж-.г1ж + Рз.-гз где Z3 - аппликата закрепленного груза, YI, 21Ж - координаты центра тяжести жидкого груза Рж при крене €$ .
Кренящие моменты Mv1, Mz1 приведут к увеличению угла крена на некоторый
yroGff . Рост угла крена 6 на угол 08е будет иметь место до тех пор, пока плечо пары сил Р и D не будет равно нулю, пока не наступит условие равновесия,
tg(er --
м
з Ож
+ ) Z Ga-Zca
где Yc«, Yc2, Yc2, ZG a - координаты центра
величины С2 и центра тяжести корабля G2.
Кренящие моменты при угле крена
( бЈ+ Off) будут равны: Муа рж .У2ж
Мг2 Рж-.г2ж + р3-.г3
При кренящем моменте Мпв на правый борт кренящие моменты сил весовой на- грузки будут равны:
рж.-г3ж + p3-.z3
Mz3
Му4 Рж .У4ж,
Мг4 рж-.24ж + р3.-гэ
Как видно на фиг.4 Yi У3Ж, Zi г3ж, У2Ж У4Ж, 22 Z45. Следовательно по абсолютной величине
Mv1 Mv3. My2 MvЛ Mz1 Mz3, Mz2 Mz4.
Откуда следует, что действие кренящих моментов сил весовой нагрузки при угле крена будет аналогичным действию кренящих моментов сил весовой нагрузки при крене Овл и
5
0
5
0
5
0
5
5
tg(
Yc4-Y G4
Z G 4 - Zc 4
Приняв кренящие моменты Млж Mv2 + Mz2, Мпж - MY Mz4 можно составить равенства максимальных моментов при качке
7) М„тах Млж + М„в, Мпж + Мпв Мптах, Млтах МптаХ
и соответствующее равенству моментов равенство углов крена при качке.
На основе вышеприведенного следует заключение, состоящее в том, что центр тяжести аварийного корабля с прямой симметричной осью равновесия при качке перемещается по кривой 62, Gi , Сз , 64 кривизна которой равна кривизне кривой центра тяжести жидкого груза С2Ж, Gix, 6зж; С4Ж. Наклонение оси равновесия к оси Z, с учетом знаков углов, в этом случае ofjiax | ошах
0 Ml. 2+Uh 0°
Если же центр тяжести закрепленного груза G3 имеет ординату Y 0, то сложив последовательно вектор силы с векторами сил , когда они приложены в точках 62Ж, С1Ж, Сзж, С4Ж получим пропорции
G3G2 G3Gi G3G3 G3G4 Рж
G2G2
-pT
0
GiGf 63СЖ G4Gf где G2, Gi, 63, 64 - центры тяжести корабля при качке.
Кривизна которой G2, GI, Сз, G4, по которой перемещается центр тяжести корабля G при качке, отличается в этом случае от кривизны кривой, по которой перемещается центр тяжести жидкого груза и тем больше, чем больше смещение закрепленного груза,
В этом случае образуются постоянные кренящие моменты закрепленного груза
MY P3 .Y3
Mz3 P3. Z3,
+ Mz3
которые вызовут определенный постоянный угол кренаб3. Очевидно, что момент М3 имеет тот же знак, что и момент Мптах и противоположен по знаку с моментом
ГЧрах,;
Млтах, уменьшает угол крена
чивает кренбК1
и увели- 1ах . Поэтому равенства 7), 8)
примут вид:
п к л max 9) Мл
+ МЛВ-МЭ.
Мптах + М3 Мж + Мпв + М3При этом разность углов крена на противоположные борта равна:
2&
а среднее значение угла крена
+ ©
+ &
Последнее равенство говорит о том, что корабль имеет несимметричную ось равновесия, наклоненную к оси Z на угол & ,
Изменение оси равновесия вызывает изменение кренящих моментов жидкого груза. Чтобы определить изменение кренящих моментов жидкого груза при качке корабля с несимметричной осью равновесия составим разности моментов силы веса
жидкого груза при углах крена ©J , 0п и углах крена ( 0JF ), (0п+ ©8е )
ДМул Р(У2ж-У1ж),
ДМ2 РЖ(22Ж-21Ж).
ДМуп Рж(У4ж-Ґзж),
ДМгп РжЈ4ж-23ж).
Так как У1Ж Узж, У2Ж У4Ж гзж Zi. г2ж 24ж,то
ДМу ДМу,
ДМ2Л ДМ2П.
Следовательно, при увеличении угла крена на один борт и уменьшении угла крена на ту же величину на противоположный борт изменения моментов силы веса жидкого груза и вызываемые этими изменениями соответствующее увеличение и уменьшение углов крена на противоположные борта, будут равны. Если моменты ДМу, ДМуп, Д Мгл, ДМг представить в виде момента
Д Мж Д Му + Д Mz Д MY +Д Mzn, а обусловленные этими моментами углы крена обозначить углом
то можно составить равенства моментов углов крена при качке корабля с несиммеричной осью равновесия:
11) Мл Млтах - М3 - ДМЖ.
max + м; упак
МП МП 12)
+ дмж,
+ Дбг
Средний угол крена, как это видно на фиг,4, 0 + Д0
Возникновение составляющего угла
крена Д0 аварийного корабля является следствием влияния свободных поверхностей на перемещение центра тяжести G.
При этом величина угла Д0 не зависит от амплитуды колебаний, а определяется только весовой нагрузкой воды в затопленных
отсеках и углом крена Э3. Физически момент ДМЖ, а следовательно, и угол ДО является следствием момента веса воды, заключенной в секторе угла (бР+Дв) и представляет собой постоянную величину.
Поэтому угол крена, Q & + Д0 будет являться также постоянной величи0
5
0
5
0
5
0
ной, он не зависит от качки и не отличается от крена корабля на спокойной воде.
Чтобы определить наклон несимметричной, аварийной оси равновесия достаточно замерить углы крена 0п , ©л и найти половину их разности.
Используя известную закономерность всплытия корабля на гребне и погружение корабля на подошве волны на одну и ту же величину Д Т (фиг.З) возможно определить осадку корабля на спокойной воде.
Для этого необходимо замерить минимальную и максимальную осадки корабля на волнение. Полуразность осадок будет равна
ттпах AT I- I
AT----2--- а осадка на спокойной воде будет равна
т тт1п + дт ттах + дт.
Зная значение угла крена 0 и осадки Т1 аварийного корабля на спокойной воде, используя описание оценки статической остойчивости, можно определить координаты YG, ZG центра тяжести корабля G, построить диаграмму остойчивости так как это показано на фиг.2.
Как видно построенная диаграмма остойчивости аварийного корабля с учетом перемещения центра тяжести G отличается от диаграммы Риде, построенной для корабля с симметричной прямой осью равновесия: диаграмма сдвинута от начала координат 100 на величину аварийного угла крена
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРИСОЕДИНЕННЫХ МАСС, МОМЕНТОВ ИНЕРЦИИ И ДЕМПФИРОВАНИЯ МОДЕЛЕЙ СУДОВ МЕТОДАМИ ИХ СВОБОДНЫХ КОЛЕБАНИЙ В ЖИДКОСТИ | 2009 |
|
RU2425343C1 |
| Способ управляемого изменения крена автономного необитаемого подводного аппарата | 2024 |
|
RU2823820C1 |
| Способ оценки и восстановления начальной остойчивости судна | 2021 |
|
RU2764048C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КРЕНОВАНИЯ СУДНА | 2012 |
|
RU2522671C1 |
| СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2021 |
|
RU2767563C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2009 |
|
RU2405712C1 |
| СПОСОБ ИСПЫТАНИЙ МОДЕЛЕЙ КОРПУСОВ СУДОВ | 2017 |
|
RU2667434C1 |
| КОРАБЛЬ БЕЗ БОРТОВОЙ КАЧКИ НА ВОЛНЕНИИ | 2007 |
|
RU2360827C2 |
| МОРСКОЙ СПАСАТЕЛЬ - НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ СУДНО | 2015 |
|
RU2603818C1 |
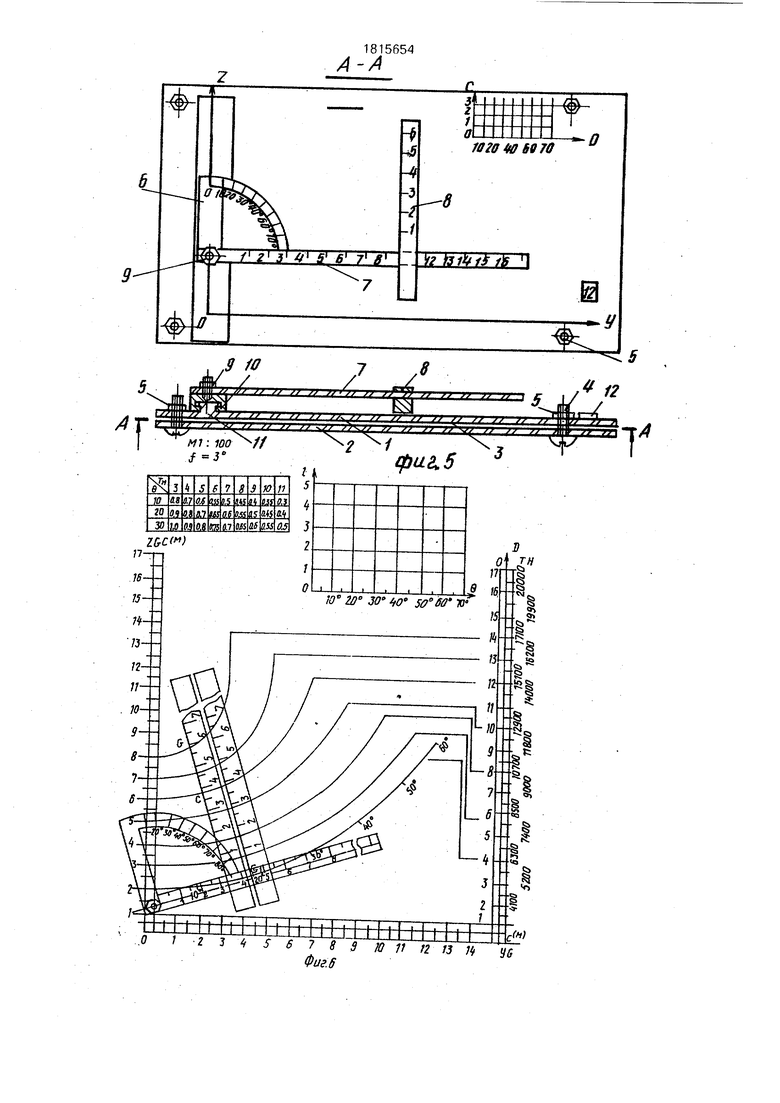
Изобретение относится к вычислительным устройствам и может быть использовано для измерения остойчивости корабля. Целью изобретения является повышение точности измерения фактической остойчивости корабля за счет решения системы уравнений центра тяжести аварийного корабля. Прибор содержит корпус из двух прозрачных пластин, между которыми закрепляется сменный комплект графиков. В одной части корпуса закреплено с возможностью перемещения и вращения угломерное устройство, содержащее транспортир и две линейки, на верхней части корпуса, выполненной мелкорифленой, нанесены оси корабельной системы координат и оси для построения статической остойчивости. Прибор позволяет графически определить координаты центра тяжести корабля в зависимости от фактической посадки и оперативно построить диаграмму статической остойчивости. 7 ил., 1 табл.
Равенства 12) свидетельствуют, что угол
В данном случае особенности диаграмкрена 0л на левый борт меньше угла крен© мы статической остойчивости объясняются
ио nnnn, ..-„ тем. что лиягпяммя г.тппмтг.я. иг.хпля м.ч мяна правый борт;
тем, что диаграмма строится, исходя из известных в теории корабля требований построения диаграммы с приведенной метацентрической высотой, которая отличается от метацентрической высоты построен- РКрах ,
пах
+ 03 + Д0 2(0 + Д0)
В данном случае особенности диаграммы статической остойчивости объясняются
тем. что лиягпяммя г.тппмтг.я. иг.хпля м.ч мятем, что диаграмма строится, исходя из известных в теории корабля требований построения диаграммы с приведенной метацентрической высотой, которая отличается от метацентрической высоты построенной для корабля с прямой осью равновесия. Отличие тем больше, чем больше угол ©аь . Однако при малых углах ©аь представляется возможным использовать предложенный прибор для определения метацентрической высоты т/о неповрежденного корабля.
Поскольку неповрежденный корабль не имеет затопленных отсеков и вес жидкого груза Рж 0, то плечи I3, 1Ж, углы кренав,© .Д0 будет также равны нулю. Корабль будет (фиг.1) иметь несимметричную ось равновесия согласно уравнению равновесия.
&Ј
если, например, посредством перебалла- стирования центр тяжести корабля с весовой нагрузкой Р сместить на диаметральной плоскости на величину ординаты YG.
Чтобы аппликата центра тяжести оставалась без изменений перебалластировку необходимо производить между танками одинаковой высоты.
Соблюдение этого правила позволит повысить точность определения по формуле
13) tj0 Z + Zc - ZG Zx - ZG
Из описания следует, что для определения остойчивости корабля необходимы два варианта весовой нагрузки: первый- до повреждения, второй - после. Вариант весовой нагрузки до повреждения может быть любой и это не повлияет на решение задачи. Поэтому целесообразно избрать для расчетов остойчивости постоянный эталонный ва- риант, близкий к водоизмещению порожнем. Кривую центра величины корабля с эталонной нагрузкой на графиках целесообразно выделить, например, красным цветом. Эталонный вариант должен использоваться и при определении остойчивости аварийного корабля. Таким образом, используя предложенный прибор для определения остойчивости, осадку Ti, углы наклонения 0 и f корабля с эталонной нагрузкой следует считать элементами посадки корабля до аварий, а осадку Т, углы наклонения 0, f - элементами посадки корабля после аварии.
При определении остойчивости угол дифферента должен быть равен построечному углу дифферента Безусловно, что искусственносозданный крен неповрежденного корабля в пределах 5° и построенный дифферент не являются аварийными. Однако, при этих углах наклонения образуется система сил, действующих на корабль, идентичная с системой сил, действующих на аварийный корабль: вектор силы закрепленного груза Р3 следует для
неповрежденного корабля считать за векторы силы эталонной весовой нагрузки. Вектор силы Рж Д D, который при определении остойчивости аварийного корабля равен весу жидкого груза, при опре- делении неповрежденного корабля представляет разность фактической и эталонной весовых нагрузок корабля.
Поскольку система сил аварийного и неповрежденного корабля с несимметричной осью равновесия абсолютно идентичны, то и действия по определению начальной остойчивости корабля /о с использованием графиков кривых центра величины должны
быть идентичными с действиями при определении остойчивости аварийного корабля. Очевидно, что решение задачи по определению остойчивости корабля, особенно в аварийных ситуациях, для обеспечения точности и оперативности решения, необходимо механизировать.
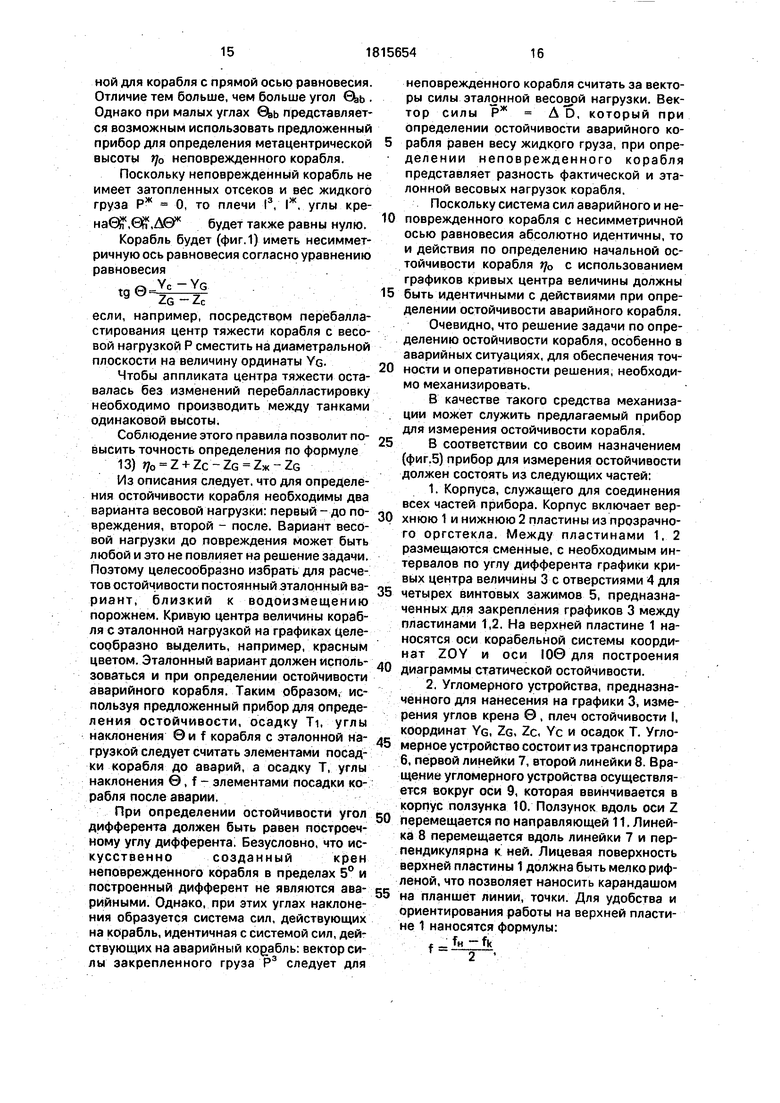
В качестве такого средства механизации может служить предлагаемый прибор для измерения остойчивости корабля.
В соответствии со своим назначением (фиг.5) прибор для измерения остойчивости должен состоять из следующих частей:
четырех винтовых зажимов 5, предназначенных для закрепления графиков 3 между пластинами 1,2. На верхней пластине 1 наносятся оси корабельной системы координат ZOY и оси ЮЭ для построения
диаграммы статической остойчивости.
перемещается по направляющей 11. Линейка 8 перемещается вдоль линейки 7 и перпендикулярна к ней. Лицевая поверхность верхней пластины 1 должна быть мелко рифленой, что позволяет наносить карандашом
на планшет линии, точки. Для удобства и ориентирования работы на верхней пластине 1 наносятся формулы:
t fn-fk т--2 v
где fn. f - углы дифферента на нос и корму, .
Т Т
2 + At
3 I3
рЖ
GC l 4ctg0
На лицевой поверхности верхней пластины 1 должен быть пенал 12 для калькуля- тора и набора карандашей.
Для ознакомления с работой на приборе рассмотрим пример, показанный на фиг.6: корабль с эталонной осадкой-Ti 40 м, D 6300Т после аварии имеет осадку Т 11,6 м, угол крена 0 20°.0 и угол дифферента ,0.
Для определения остойчивости необходимо:
1з 4,5 -3,3 1,2м
Vcm0
GC ЮОСИ.2-2.8 2.36м 15100-6300
По линейке 8 величину GC отложить от центра величины С и нанести на прибор центр тяжести G.
д
0
0
5
0
5
0
5
чтобы отсчет транспортира 6 был равен 30°, а верхняя грань линейки 7 совпадала с центром тяжести G. На кривой центра величины, соответствующей осадке Т 12 м и крену © 30° нанести центр величины Сзо, а линейку 8 передвинуть так, чтобы его левая грань совпала с точкой Сзо. После этого по линейке 7 необходимо определить разность отсчетов между левой гранью линейки 8 и центром тяжести G, которая представляет плечо статической остойчивости при крене 0 30°;
зо 2,7-1,8 0,9м
1) Если учесть, что запас остойчивости по углу крена
©зап ©зап - ©аЬ 75° - 20° 55°
то представляется возможным провести мероприятия по борьбе за живучесть корабля: произвести разведку, заделать пробоины, откатать воду из затопленных отсеков.
2) Если есть необходимость спрямления корабля, то для этого необходимо создать контрзатоплением момент
Мкр 1,5.15100 22650 тм где 1,5м- плечо при крене, 0 20°, а 15100 тн - весовое водоизмещение.
3) В том случае, если борьба с затоплением будет безуспешной, угол крен0зап- 0°. то необходимо приступить к эвакуации экипажа.
Отличие построенной на приборе диаграммы статической остойчивости от диаграммы, полученных с использованием указанных выше приборов первой и второй группы, заключается в том, что на приборе получают проекцию на плоскость мидель- шпангоута полного плеча 1 14)
CDBav,ef 4osf
огё0 W+Сш (да
V
которое представляет сумму плеча
15)l0(Yc-YG).cos0 + (Zc-ZG).sin0 , зависящего от углов крена, и плеча
16) If (Хс - XG).cosf + (Zc - ZG).sln f зависящего от углов дифферента.
Комплект графиков кривых центра величины, прилагаемый к прибору, представляет
собой шкалу, соответствующую корабельной оси абсцисса X. Такая шкала позволяет избежать пространственного построения плеч остойчивости и решать задачу в одной плоскости, что упрощает устройство прибора. Поскольку правая сторона мидель- шпангоута относительно диаметральной плоскости представляет зеркальное изображение левой стороны мидель-шпангоута, то для решения задачи по определению остойчивости корабля с креном на левый борт можно использовать графики, построенные для правой части миделя, что позволяет уменьшить размеры прибора. Формула.изобретения Прибор для измерения остойчивости, содержащий корпус и комплект графиков, отличающийся тем, что, с целью повышения точности измерения фактической остойчивости корабля за счет решения системы уравнений центра тяжести аварийного корабля, корпус выполнен из двух прозрачных пластин, между которыми
закреплены сменные графические элементы, в одной части корпуса закреплено в пазах с возможностью перемещения вдоль этого края и возможностью вращения вокруг оси угломерное устройство, содержащее
транспортир, к нижней части которого прикреплена первая линейка со шкалой, на которой перпендикулярно закреплена с возможностью перемещения перпендикулярно первой линейке вторая линейка со
шкалой, на верхней пластине корпуса, выполненной мелкорифленой, нанесены оси корабельной системы координат и оси для построения диаграммы статической остойчивости.
| Козлов К.С | |||
| Современные методы оценки посадки остойчивости судна | |||
| - Л.: Морской транспорт, 1963 | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
