Изобретение относится к подводному судостроению, в частности, к способам и устройствам управления автономными необитаемыми подводными аппаратами (АНПА).
При использовании АНПА, оборудованного в подкильной зоне гидролокатором бокового обзора (ГБО), многолучевым эхолотом (МЛЭ), профилографом (ПФ) и абсолютным гидроакустическим лагом (АГЛ), остро стоит задача обследования не только поверхности дна, но и боковых поверхностей препятствий и других морских объектов естественного и антропогенного происхождения, поиска малоразмерных объектов на морской поверхности. В связи с этим актуальным является управляемое изменение крена АНПА так, чтобы зоны обзора ГБО, МЛЭ, ПФ и АГЛ оказались развернутыми к обследуемой поверхности.
Основные публикации, связанные с кренованием морских объектов, посвящены сохранению остойчивости надводных судов. Описанные в публикациях способы основаны, в основном, на уменьшении влияния качки надводных судов, приводящих к снижению остойчивости судна.
Так, в способе противодействия боковому сносу и управления креном судна [1] разработано устройство для его реализации, содержащее якорь, обладающий высоким сопротивлением боковому перемещению, авторегулирующий свои угловые положения в зависимости от передаваемых на него сил от судна и соединений для крепления к судну.
В [2] предложено устройство для умерения бортовой качки морских судов с большой поперечной остойчивостью и алгоритм определения его элементов, размещаемых вдоль бортов, с установлением сдвоенных наружных вертикальных днищевых нейтрализаторов волновых нагрузок.
В [3] предложено устройство также для умерения бортовой качки морских судов с большой поперечной остойчивостью, представляющее собой пассивные успокоители бортовой качки в виде выступающих за пределы корпуса прочных конструкций.
Предложенный в [4] способ контроля остойчивости судна на разрушающемся волнении в заданном районе плавания основан на измерении угловых скоростей и перемещении при бортовой качке. По данным измерений рассчитывают характеристики ударного воздействия разрушающихся волн, определяют фактические показатели динамики взаимодействия судна с внешней средой и производят оценку остойчивости в момент удара волны и в условиях стремительного дрейфа от воздействия разрушающейся волны.
В [5] предложено в целях обеспечения остойчивости корабля в штормовом плавании измерять угловые перемещения и ускорения судна относительно продольной и поперечной центральных осей, линейные перемещения, определяющие осадки судна носом и кормой.
Общим недостатком всех перечисленных способов является целевая направленность на сохранение остойчивости судов и на снижение их бортовой качки.
Применительно к подводным аппаратам известен способ управления креном подводного подвижного объекта [6]. Способ заключается в том, что для управления креном устанавливают горизонтальные рули определенным образом, опытным путем определяют коэффициент пропорциональности крена квадрату угловой скорости вращения винта движителя подвижного объекта и вводят полученные данные в компьютерную систему управления подвижного объекта, автоматически выставляют горизонтальные рули для вычисленного значения кренящего момента. Система содержит силовые цилиндры поворота баллеров правого и левого горизонтальных рулей с синхропреобразователями обратной связи и распределителями рабочей жидкости систем гидравлики, управляемые переключатели работы силовых цилиндров с корабельной на резервную систему гидравлики, сервоприводы управления распределителей жидкости, пульт управления движением подводного объекта с синхропреобразователями поворота штурвалов управления горизонтальными рулями, блок дистанционного управления рулями, процессорный блок, синхропреобразователи обратной связи силовых цилиндров. Обеспечивается обнуление кренящего момента подводного объекта.
К недостаткам способа и реализующего его устройства креновыравнивания с помощью горизонтальных рулей следует отнести направленность способа на обнуление кренящего момента и невозможность изменения крена при нахождении АНПА в состоянии покоя под водой или в режиме позиционирования.
Некоторые способы компенсирования качки надводных судов могут быть использованы для кренования АНПА. В судостроении широко применяется способ управления креном (креновыравнивание) судна балластировкой водой цистерн, размещенных со смещением к борту от диаметральной плоскости судна.
Так в автоматизированной системе кренования судна [7] рабочее тело выполнено в виде размещенного в расположенной поперек диаметральной плоскости судна трубе-цилиндре поршня, имеющего на своих торцах демпферы-фиксаторы, под которые в торцах трубы-цилиндра образованы ответные фиксирующие гнезда, расположенные с возможностью обеспечения зазора между торцом поршня-рабочего тела и внутренним торцом трубы-цилиндра.
Недостатком предложенного способа является ограничение на максимально возможный создаваемый крен.
Аналогичным недостатком обладает успокоитель бортовой качки судна [8], в котором предложен активный успокоитель бортовой качки судна с рабочим телом в виде поршня, перемещаемого в трубе-цилиндре при компактном размещении его на палубе судна.
В способе оценки и восстановления начальной остойчивости судна [9] предложено на основе измерений угла крена судна и из условий неопрокидывания и непереваливания судна использовать для заполнения жидким балластом две низко расположенные цистерны и первоначально заполнять ту из них, которая находится на борту, вошедшем в воду, затем заполнять жидким балластом вторую цистерну.
Недостатком способа являются целевая направленность на неопрокидывание и непереваливание надводного судна, вследствие чего способ имеет существенное ограничение на изменение крена.
Способ, принятый за прототип [10], заключается в том, что описанная система содержит, по крайней мере, три полости для изменения плавучести подводного устройства за счет приема и сброса забортной воды, которая находится в упомянутых полостях под избыточным по отношению к забортному давлением за счет газа, находящегося в объеме полостей. Полости разнесены на корпусе подводного устройства для обеспечения создания моментов по крену и дифференту. Каждая полость сообщена с забортной средой через соответствующий клапан сброса воды и снабжена насосным агрегатом с невозвратным клапаном для приема воды в полость. Возникающий крен подводного устройства устраняют принудительным (с помощью насосного агрегата) приемом воды в соответствующую из разнесенных по бортам цистерну, в которой поддерживают избыточное по отношению к забортному давление газом, например воздухом, и/или стравливают из противоположной (симметрично расположенной) цистерны воду через дистанционно управляемый клапан с одновременным сохранением заданной плавучести.
К недостаткам способа и реализующего его устройства креновыравнивания с помощью балластировки побортно расположенных цистерн следует отнести целевую направленность выравнивания крена, ограничивающую создание заданного крена на произвольный угол, и отсутствие возможности нахождения АНПА с заданным креном в устойчивом состоянии.
Решаемая техническая проблема: возможность управляемого изменения крена АНПА из диапазона ±180° для обследования наклонных, вертикальных и находящихся над подводным аппаратом поверхностей.
Сущность предлагаемого изобретения заключается в том, что для достижения целевого значения крена в диапазоне ±180°:
– АНПА имеет крестообразные или Х-образные кормовые рули;
– АНПА оборудуют четырьмя балластными цистернами, центры тяжести (ЦТ) которых расположены в плоскости, поперечной диаметральной плоскости АНПА и проходящей через центр величины (ЦВ) АНПА, а сами балластные цистерны размещены: одна – внизу корпуса, вторая – по правому борту, третья – вверху корпуса, четвертая – по левому борту; при этом балластные цистерны соединены между собой трубопроводами для перегонки воды из одних цистерн в другие с использованием насосов в целях сохранения постоянной плавучести АНПА;
– некоторый груз устанавливают так, чтобы его можно было перемещать по вертикали, например, подвешенный в свободном состоянии в ЦВ АНПА;
– перед кренованием АНПА находится в устойчивом состоянии с нулевым креном, для чего расположенная внизу балластная цистерна заполнена водой, груз опущен по вертикали в крайнюю нижнюю точку АНПА, ЦТ АНПА расположен вблизи нижней точки АНПА в вертикальной плоскости, поперечной диаметральной плоскости АНПА и проходящей через ЦВ АНПА;
– корпус АНПА представляет собой фигуру вращения вокруг продольной оси для обеспечения равномерного распределения массы корпуса АНПА;
– приборы внутри корпуса АНПА размещают так, чтобы их масса была распределена равномерно в диаметральной плоскости АНПА;
– перед началом кренования АНПА должен быть удифферентован с нулевым дифферентом, то есть плоскость, поперечная диаметральной плоскости, в которой расположены ЦТ АНПА и ЦТ балластных цистерн, должна находиться в строго вертикальном положении;
– по командам системы управления АНПА вода между балластными цистернами перегоняется насосами так, чтобы возник кренящий момент в направлении заданного значения крена;
– при достижении заданного крена груз перемещается в крайнюю нижнюю точку АНПА для создания устойчивого положения АНПА.
Для создания управляемого крена системой управления АНПА определяется рассогласование между текущим значением угла крена и заданным, на основании которого система управления АНПА определяет значение необходимого для изменения крена кренящего момента Mx.
Для создания необходимого кренящего момента системой управления определяются балластные цистерны для заполнения/осушения водой.
По мере перегонки воды возникает кренящий момент, в результате чего происходит изменение текущего значения угла крена АНПА. Навигационная система АНПА выдает в систему управления АНПА текущее значение угла крена. Если заданное значение угла крена АНПА не достигнуто, то перегонка воды между балластными цистернами продолжается до тех пор, пока текущее значение крена не приблизится к заданному.
Такой подход позволяет создать управляемый крен АНПА.
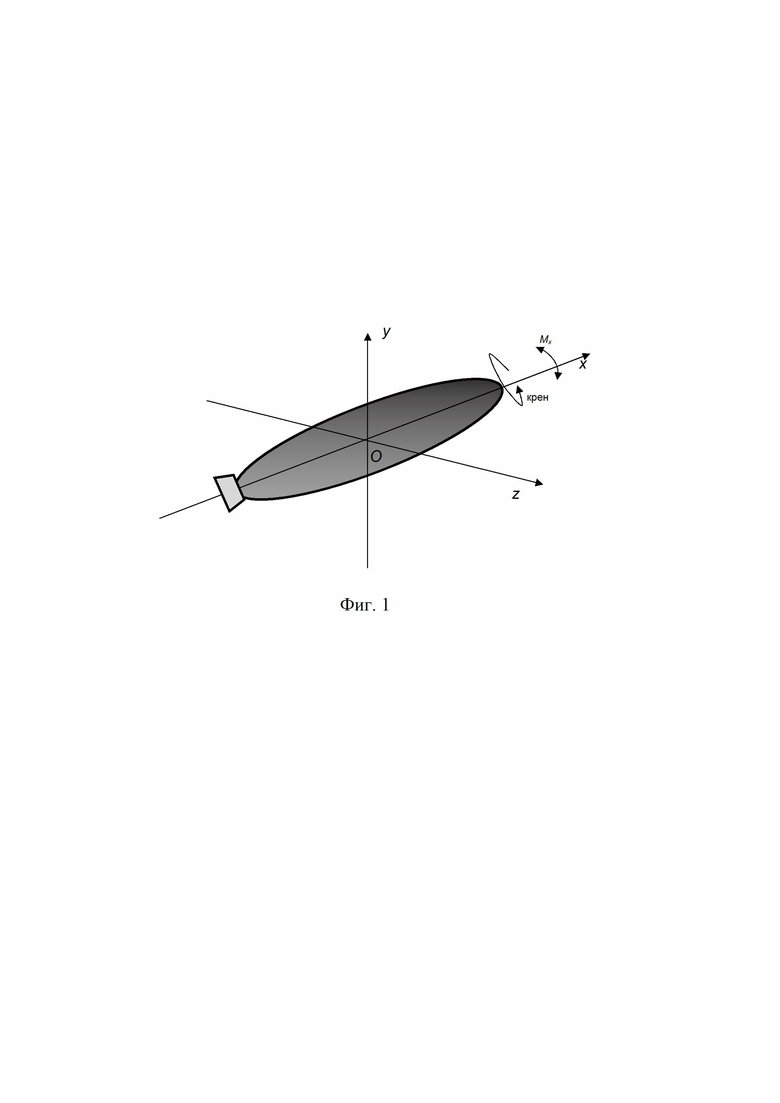
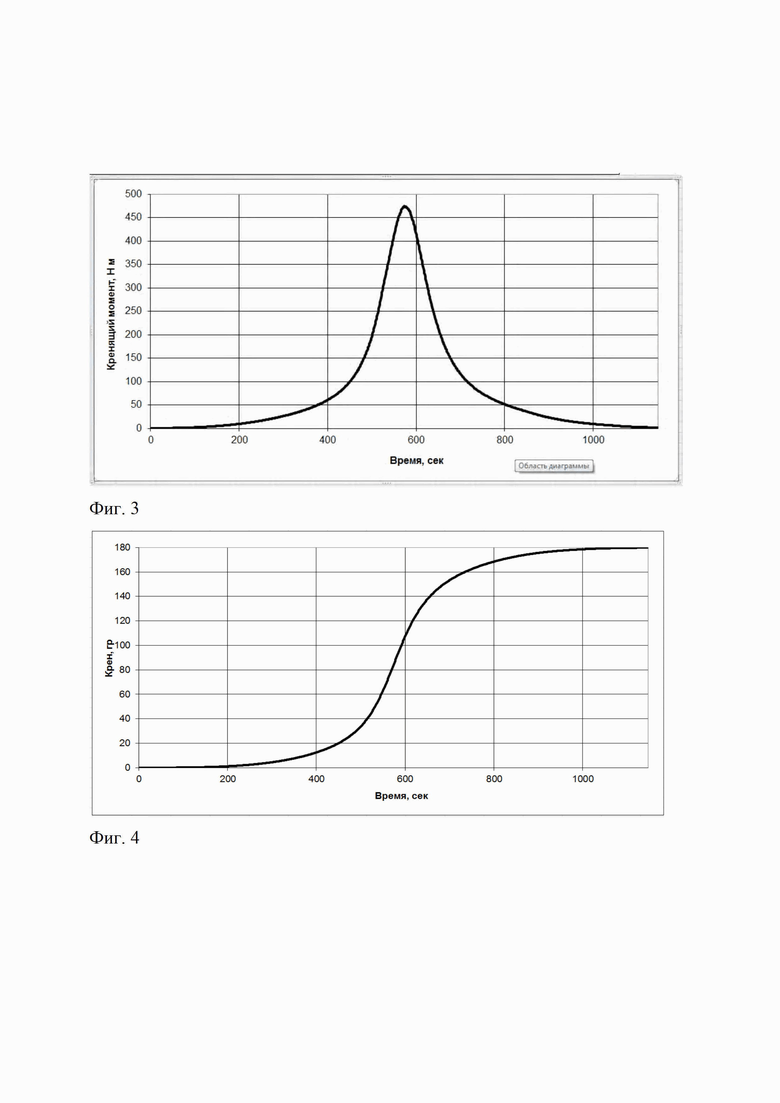
- Изобретение поясняется чертежами. На фиг.1 представлен корпус АНПА в связанной с ним системе координат Oxyz с центром в точке положения ЦВ, к которой приложена сила плавучести (Архимедова сила), ось Oy (нормальная) лежит в плоскости Oxy и направлена вверх, перпендикулярно оси Ox, ось Oz (боковая) перпендикулярна плоскости Oxy и направлена на правый борт; на фиг.2 приведена схема сечения корпуса АНПА вертикальной плоскостью, поперечной к диаметральной плоскости АНПА, с размещением балластных цистерн 1 – 4 внутри корпуса АНПА, на фиг. 3 приведена зависимость изменения кренящего момента с течением времени по результатам моделирования, на фиг. 4 приведена зависимость изменения угла крена с течением времени по результатам моделирования.
Функционирование заявляемого способа осуществляется следующим образом:
1) В начальном положении АНПА находится в состоянии покоя, начальное значение угла крена АНПА θ0 = 0. Задается угол крена θ* из диапазона: ± 180°.
2) Если текущее значение угла θ крена АНПА не совпадает с заданным θ*, то определяется рассогласование Δθ между текущим θ и заданным θ* значениями углов крена:
Δθ = θ – θ*. (1)
3) Требуемое значение кренящего момента:
 (2)
(2)
где Mx* – требуемое значение кренящего момента для создания заданного угла крена АНПА, Н⋅м;
KП – пропорциональный коэффициент закона регулирования угла крена;
KД – дифференциальный коэффициент закона регулирования угла крена.
4) Для создания требуемого кренящего момента системой управления АНПА определяются балластные цистерны для заполнения/осушения водой.
5) Система управления АНПА выдает команды на перегонку воды между цистернами так, чтобы создать кренящий момент в требуемом направлении.
6) Кренящий момент Mx возникает под действием гидродинамических сил, силы начальной (эксплуатационной) избыточной плавучести и силы плавучести, возникающей в результате обжатия корпуса АНПА [11]. Кроме того, уравнение расчета кренящего момента Mx дополнено моментами, создаваемыми плавучестью балластных цистерн в зависимости от заполнения их водой:
 , (3)
, (3)
где
ρ – плотность воды, кг/м3 ;
υ – вектор скорости движения АНПА;
V – полное подводное объемное водоизмещение АНПА, м3;
ψ – угол дифферента, град;
 – позиционный коэффициент кренящего момента;
– позиционный коэффициент кренящего момента;
h – метацентрическая высота, отнесенная к полному подводному объему АНПА, м;
P0 – начальная (эксплуатационная) избыточная плавучесть, Н;
 – плавучесть, возникающая в результате обжатия корпуса, Н;
– плавучесть, возникающая в результате обжатия корпуса, Н;
zDC – расстояние по ширине АНПА от ЦВ полного подводного объема АНПА до ЦТ балластной цистерны№1, м;
yDC – расстояние по высоте АНПА от ЦВ полного подводного объема АНПА до ЦТ балластной цистерны №1, м;
zRC – расстояние по ширине АНПА от ЦВ полного подводного объема АНПА до ЦТ балластной цистерны №2, м;
yRC – расстояние по в высоте АНПА от ЦВ полного подводного объема АНПА до ЦТ балластной цистерны №2, м;
zUC – расстояние по ширине АНПА от ЦВ полного подводного объема АНПА до ЦТ балластной цистерны №3, м;
yUC – расстояние по высоте АНПА от ЦВ полного подводного объема АНПА до ЦТ балластной цистерны №3, м;
zLC – расстояние ширине АНПА от ЦВ полного подводного объема АНПА до ЦТ балластной цистерны №4, м;
yLC – расстояние по высоте АНПА от ЦВ полного подводного объема АНПА до ЦТ балластной цистерны №4, м;
PD – плавучесть балластной цистерны №1, Н;
PR – плавучесть балластной цистерны №2, Н;
PU – плавучесть балластной цистерны №3, Н;
PL – плавучесть балластной цистерны №4, Н;
π – математическая постоянная, равная 3,141592654….
7) В результате перегонки воды между балластными цистернами происходит смещение положения ЦТ АНПА. Координаты (xct, yct) текущего положения ЦТ АНПА определяются как отношение моментов сил тяжести всех балластных цистерн к общей массе воды в них [12, с.267]:
 (4)
(4)

где
mD – масса балластной цистерны №1, кг;
lD – проекция расстояния до ЦТ балластной цистерны №1 на ось Oz, м;
mR – масса балластной цистерны №2, кг;
lR – проекция расстояния до ЦТ балластной цистерны №2 на ось Oz, м;
mU – масса балластной цистерны №3, кг;
lU – проекция расстояния до ЦТ балластной цистерны №3 на ось Oz, м;
mL – масса балластной цистерны №4, кг;
lL – проекция расстояния до ЦТ балластной цистерны №4 на ось Oz, м;
Поскольку центр системы координат Oxyz совпадает с положением ЦВ АНПА, то в системе координат Oxyz координаты ЦВ xcw =0 и ycw=0.
8) В результате смещения положения ЦТ АНПА также меняется метацентрическая высота АНПА, определяемая вертикальным расстоянием между положениями ЦВ АНПА и ЦТ АНПА [13]:
h=ycw – yct. (5)
9) Из-за перегонки воды между балластными цистернами и в результате созданного кренящего момента Mx в вертикальной плоскости yOz происходит изменение угловой скорости ωx изменения крена АНПА, определяемой выражением [11]:
 (6)
(6)
где
Ix – момент инерции АНПА относительно продольной оси Ox, кг·м2;
k44 – коэффициент момента инерции относительно оси Ox, безразмерный.
10) Момент инерции Ix АНПА определим как момент инерции заполненного однородного твердого цилиндра радиуса r (м), равного радиусу корпуса АНПА:
Ix = тr2/2, (7)
где m – масса АНПА, кг.
11) Скорость изменения крена, град./с:
 . (8)
. (8)
12) Значение угла крена:
 , (9)
, (9)
где T – период времени, за который произошло изменение крена, с.
Описанная процедура изменения крена АНПА повторяется до тех пор, пока полученное значение θ не совпадает с заданным θ*.
Приведём пример изменения крена АНПА в соответствии с предлагаемым способом путем моделирования.
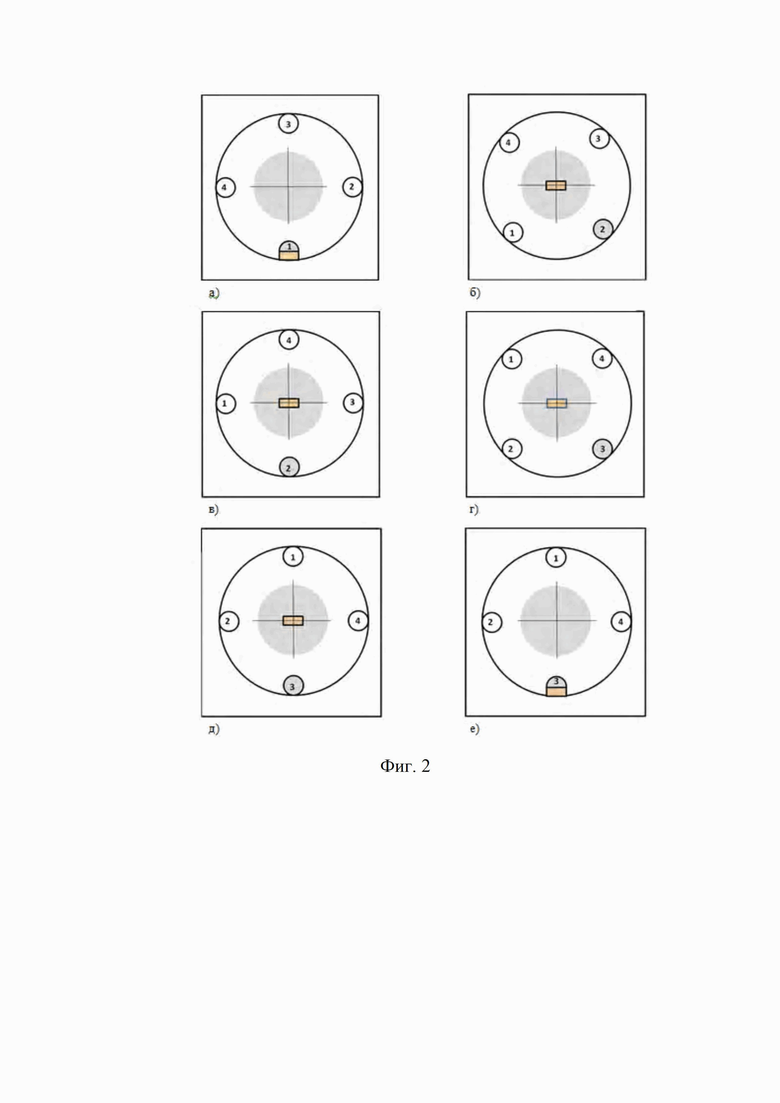
На фиг.2а приведена схема поперечного сечения корпуса АНПА вертикальной плоскостью, поперечной к диаметральной плоскости АНПА, с размещением балластных цистерн 1 – 4 внутри корпуса АНПА. Для демонстрации динамики изменения крена сухая цистерна обозначена окружностью, заполненная водой – кругом; положение груза показано прямоугольником.
При проведении расчетов за прототип АНПА принят «Bluefin-21» (США) со следующими характеристиками [15]: масса 750 кг; длина H = 5,0 м; диаметр D = 0,53 м. Объем каждой балластной цистерны принимался равным 0,002 м3.
В начальный момент времени АНПА находился в устойчивом состоянии, заполнение цистерн представлено на фиг. 2а. Момент инерции АНПА с использованием выражения (7) составил Ix1=26,3 кг⋅м2, полное подводное водоизмещение V принято равным 1,1 м3.
Пусть задан угол крена θ*, равный +180° (положительное значение – на правый борт). Для изменения текущего значения крена θ по команде системы управления АНПА происходило перемещение некоторого груза вверх до совмещения ЦТ груза с продольной осью АНПА на уровне положения ЦВ АНПА (фиг.2б).
Навигационная система АНПА вырабатывает текущее значение угла крена, которое поступает в систему управления АНПА, где оно сравнивается с заданным значением крена θ*. По рассогласованию заданного и текущего значений углов крена, рассчитанного с использованием (1), системой управления АНПА определяется кренящий момент Mx*, который необходимо создать, чтобы достигнуть крена на требуемый угол θ*.
Алгоритмами системы управления АНПА определяются балластные цистерны, способные создать требуемый кренящий момент на правый борт. При указанном на фиг.2б положении балластных цистерн для этого требуется вращение корпуса АНПА по часовой стрелке. Кренящий момент на начальном этапе кренения создается перегонкой воды из балластной цистерны №1 в балластную цистерну №2 (фиг.2б). По мере наполнения водой балластной цистерны №2 возросла сила, создаваемая массой наполняемой балластной цистерны с одновременным уменьшением проекции плеча на горизонтальную ось Oz. В ходе вращения корпуса АНПА балластная цистерна №2, перейдя за вертикаль, начала создавать кренящий момент в сторону, противоположную направлению вращения (фиг. 2в). Для исключения этого из балластной цистерны №2 по команде системы управления осуществлялась перегонка воды в балластную цистерну №3 (фиг. 2г). Когда значение текущего угла крена по данным навигационной системы совпало с заданным его значением, рассогласование Δθ между заданным и текущим значениями угла крена, рассчитанное с использованием (1), уменьшилось практически до нуля. В результате созданного кренящего момента произошло вращение корпуса АНПА, и крен АНПА изменился до +180°, при котором корпус АНПА занял положение «оверкиль» (фиг. 2д).
После этого груз опускается по вертикали вниз (фиг. 2е).
По результатам моделирования получены зависимости изменения кренящего момента с течением времени (фиг. 3) и изменение угла крена с течением времени (фиг. 4).
Из приведенных на фиг. 3 и фиг. 4 результатов видно, что зависимость изменения крена от 0° до +180° имеет форму гистерезиса. Изменение кренящего момента Mx сначала плавно возрастает, затем достигает своего максимума и после этого практически симметрично возрастанию – убывает, вследствие чего крен постепенно увеличивается от 0° до +180°, и при θ = +180° кренящий момент и угловая скорость принимают нулевые значения. Время изменения крена от 0° до +180° составило 1358 сек или 23 мин.
Полученные результаты компьютерного моделирования подтверждают реализуемость и достоверность предлагаемого способа.
Источники информации:
1. Патент RU 2716602
2. Заявка RU 2006142405
3. Патент RU 2374124
4. Патент RU 2455190
5. Патент RU 2487043
6. Патент RU 2703005
7. Патент RU 2522671
8. Патент RU 2616505
9. Патент RU 2764048
10. Патент RU 2185304
11. Агеев М.Д., Киселев Л.В., Матвиенко Ю.В. и др. / под общ. ред. М.Д. Агева. Автономные подводные роботы: системы и технологии // М.: Наука. 2005. 398 с.
12. Тарг С.М. Краткий курс теоретической механики // М.: Высшая школа. 2010. 416 c.
13. Справочник по теории корабля. Статика судна. Качка судов / под ред. Я.И. Войткунского. // Л.: Судостроение. Том.2. 440 с.
HIS Jane’s Unmanned Maritime Vehicles. 2019-2020. Bluefin-21. p.14.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения величины коэффициента остойчивости необитаемого подводного аппарата опытным путем | 2020 |
|
RU2736794C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КРЕНОВАНИЯ СУДНА | 2012 |
|
RU2522671C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРИСОЕДИНЕННЫХ МАСС, МОМЕНТОВ ИНЕРЦИИ И ДЕМПФИРОВАНИЯ МОДЕЛЕЙ СУДОВ МЕТОДАМИ ИХ СВОБОДНЫХ КОЛЕБАНИЙ В ЖИДКОСТИ | 2009 |
|
RU2425343C1 |
| СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2021 |
|
RU2767563C1 |
| Система для контроля мореходных характеристик судна | 1983 |
|
SU1219446A1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| СПОСОБ КРЕНОВАНИЯ СУДНА ДЛЯ ОПРЕДЕЛЕНИЯ МЕТАЦЕНТРИЧЕСКОЙ ВЫСОТЫ | 1986 |
|
SU1384469A1 |
| Мобильная распределённая система подводного наблюдения | 2021 |
|
RU2767384C1 |
| Способ оценки и восстановления начальной остойчивости судна | 2021 |
|
RU2764048C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
Изобретение относится к подводному судостроению, а именно к способу управления креном. Для создания кренящего момента сравнивают текущее значение крена, вырабатываемое навигационной системой, с заданным его значением, и по результатам сравнения система управления автономного необитаемого подводного аппарата вырабатывает управляющие команды насосом для перекачивания воды из одних цистерн в другие. Достигается обеспечение управляемого изменения крена АНПА за счет перегонки воды между цистернами, расположенными на автономном необитаемом подводном аппарате в диаметральной плоскости по бортам, вверху и внизу. 4 ил.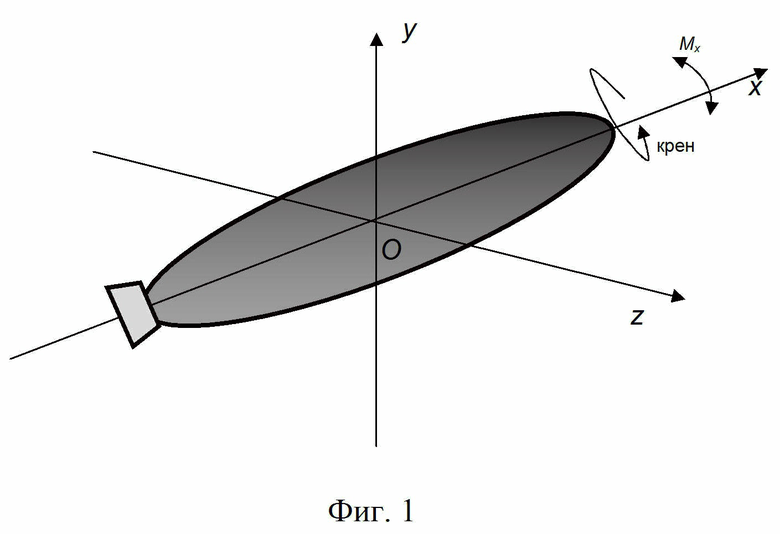
Способ управляемого изменения крена автономного необитаемого подводного аппарата (АНПА), корпус которого выполнен в виде фигуры вращения вокруг продольной оси, оборудованного системой управления АНПА, навигационной системой, крестообразными или Х-образными кормовыми рулями, отличающийся тем, что АНПА оборудован четырьмя балластными цистернами, центры тяжести которых расположены в плоскости, поперечной к диаметральной плоскости АНПА, балластные цистерны размещают внизу корпуса, по правому борту и вверху корпуса, по левому борту, соединяют между собой трубопроводами для перегонки воды из одних цистерн в другие с использованием насосов, система управления определяет рассогласование между текущим углом крена АНПА и его заданным значением, рассчитывает необходимый кренящий момент и дает команды на заполнение или осушение балластных цистерн, что приводит к изменению крена до заданного значения.
| СИСТЕМА УПРАВЛЕНИЯ ОСТАТОЧНОЙ ПЛАВУЧЕСТЬЮ, ДИФФЕРЕНТОМ И КРЕНОМ ПОДВОДНОГО УСТРОЙСТВА | 2001 |
|
RU2185304C1 |
| 0 |
|
SU164034A1 | |
| Способ определения величины коэффициента остойчивости необитаемого подводного аппарата опытным путем | 2020 |
|
RU2736794C1 |
| US 20090178603 A1, 16.07.2009 | |||
| СПОСОБ УПРАВЛЕНИЯ КРЕНОМ ПОДВОДНОГО ПОДВИЖНОГО ОБЪЕКТА И СИСТЕМА УПРАВЛЕНИЯ, РЕАЛИЗУЮЩАЯ СПОСОБ | 2016 |
|
RU2703005C2 |

