Фиг.
Изобретение относится к электромашиностроению, в частности к областям электромашиностроения, связанным с конструированием, изготовлением и эксплуатацией электромагнитных исполнительных органов.
Целью изобретения является более эффективное использование энергии электромагнитного поля и расширения эксплуатационных возможностей в части создания принципиально новых исполнительных органов - тяговых нитей и тяговых прядей и в части возможности обеспечения регулирования рабочих характеристик.
На фиг.1 изображено предлагаемое ус- тоойство; на фиг.2 - вид сбоку; на Фиг.З - вид А-А;на фиг.4,а - тяговая нить;на фиг,4,б - тяговая прядь; на фиг.5 - поперечное сечение преобразователя с четырьмя рабочими пазами (объемное исполнение).
Устройство (фиг. 1,2, 3) состоит из якоря 1 в виде гибких тяговых токопроводящих ветвей, сердечника 2, катушки возбуждения 3, проушин 4, изоляторов 5, сухарей 6, штифтов 7, направляющей рамки 8, проушин подвижных 9, шружиньн возвратной 10, клемм выводных 11, винтовых соединений 12, крышек 13, винтовых соединений 14. Работа преобразователя осуществляется в следующих режимах. В режиме двигателя при подаче напряжения на якорь 1 и катушку возбуждения 3, а также при подаче напряжения переменного тока на катушку возбуждения 3 без подачи его на якорь 1.
В процессе рабочего хода в результате взаимодействия электромагнитных полей происходит прогиб токопроводящих ветвей якоря 1, в результате чего их продольная длина сокращается, подвижная проушина 9 перемещается в сторону неподвижной проушины 4 - двигатель совершает рабочий ход.
В. режиме генератора электрического тока при подаче напряжения на катушку возбуждения 3 при обеспечении возвратно- поступательного перемещения, например, при помощи кривошипного механизма, подвижной проушины 9. В данном случае электрический ток будет генерироваться в перемещающихся в магнитном поле гибких токопроводящих ветвях якоря 1.
Гибкая тяговая нить {фиг.4,а) состоит из ряда преобразователей 15, соединенных в тяговую нить при помощи шарнирных соединений 16. В качестве преобразователей 15 используются устройства согласно фиг.1, в которых проушины 4 выполняются охватывающими по отношению к проушинам 9 по рабочим стыковочным плоскостям.
Работа гибкой тяговой нити может осуществляться в следующих режимах - режиме общего сокращения при подаче одновременно на все единичные преобразователи рабочего напряжения с полной отработкой рабочего хода, . режиме дискретного сокращения при подаче напряжения на единичные либо группу преобразователей с. целью отработки заданной
длины рабочего хода, режиме компенсации пиковых нагрузок, когда включение последующего преобразователя либо группы пре образователей осуществляется по сигналу известной конструкции датчика по нагрузке. Генераторный режим работы гибкой тяговой нити может быть обеспечен при установке между поперечной частью сердечника 2 преобразователя и токопроводя- щими ветвями якоря 1 распорных пружин,
что при обеспечении возвратно-поступательного перемещения подвижного конца нити, например, при помощи кривошипного механизма, позволяет осуществлять перемещение токопроводящих ветвей единичных преобразователей в магнитном поле и генерировать электрический ток. Причем вместо электромагнитов могут быть использованы постоянные магниты.
Гибкая тяговая прядь (фиг,4,б) состоит
из ряда гибких тяговых нитей 17. Работа гибкой тяговой пряди может осуществляться во всех перечисленных выше режимах. Кроме того, прядь может в зависимости от действующей нагрузки работать по сигналу
датчика обратной связи по нагрузке в выборочном оптимальном режиме, т.е. при включении в работу (выключении из работы) одной либо нескольких гибких нитей.
Возврат в исходное положение как самих преобразователей,так и тяговых нитей и прядей на их основе, осуществляется при помощи пружин либо воздействующей нагрузки, а также встречно работающих уст-ройств.
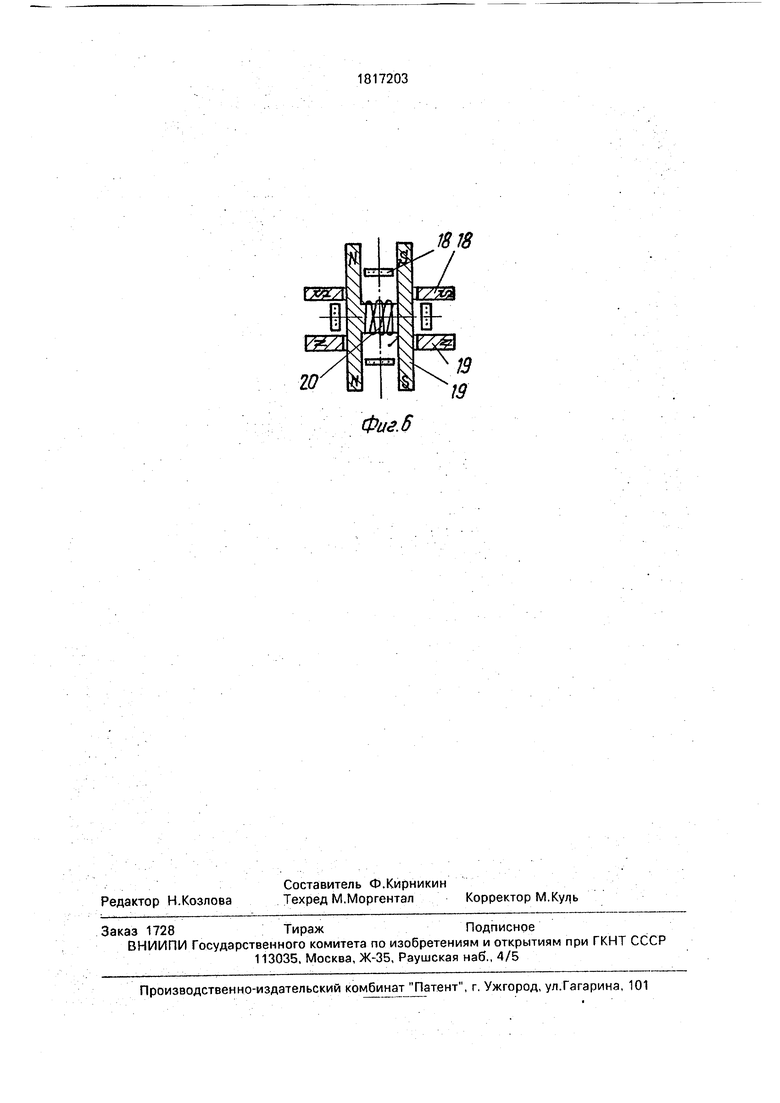
Пространственное исполнение преобразователя (фиг.5) представляет собой основную конструкцию (фиг.1) с дополнительно установленным якорем 18,
сердечником 19 и обмоткой возбуждения 20. Работа устройства осуществляется аналогично работе устройства на фиг.1.
Регулирование характеристики двигателя может осуществляться за счет выполнения прорезей в сердечнике 2. Так, при образовании центральной осевой прорези в сердечнике может быть получена характеристика с постоянным значением тягового усилия преобразователя в процессе перемещения.
Формула изобретения Электромеханический преобразователь возвратно-поступательного действия, содержащий сердечник с обмоткой, якорь и возвратную пружину, отличающийся тем, что, с целью более эффективного использования энергии магнитного поля и расширения эксплуатационных возможностей, он снабжен двумя проушинами: подвижной и неподвижной, и направляющей рамкой, якорь выполнен в виде двух гибких тяговых токопроводящих ветвей, а торцы
сердечника образуют полюса, в пзэах кото рых размещены токопроводящие ветви, ох ватывающие сердечник с обмоткой v образующие по противоположным сторо нам сердечника две петли, одна из которых закреплена на неподвижной проушине, установленной непосредственно на сердечнике, а другая - на подвижной проушине, размещенной в закрепленной на сердечнике направляющей рамке, причем подвижная проушина выполнена с возможностью взаимодействия с возвратной проушиной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Предохранительное устройство | 2017 |
|
RU2649661C1 |
| ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО | 2018 |
|
RU2685246C1 |
| ЭЛЕКТРОТЕХНИЧЕСКИЙ КОМПЛЕКС ПОРШНЕВОГО КОМПРЕССОРА НА ОСНОВЕ ЛИНЕЙНОЙ МАГНИТОЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2019 |
|
RU2720882C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МАШИН УДАРНОГО ДЕЙСТВИЯ | 2011 |
|
RU2454777C1 |
| Линейный двигатель постоянного тока | 1983 |
|
SU1136269A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 1993 |
|
RU2065659C1 |
| Линейный электрический двигатель | 1978 |
|
SU1037386A1 |
| Электромагнитный двигатель возвратно-поступательного движения | 2022 |
|
RU2797842C1 |
| СПОСОБ КОНТРОЛЯ СОХРАННОСТИ ОБЪЕКТА | 2015 |
|
RU2591692C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2149493C1 |
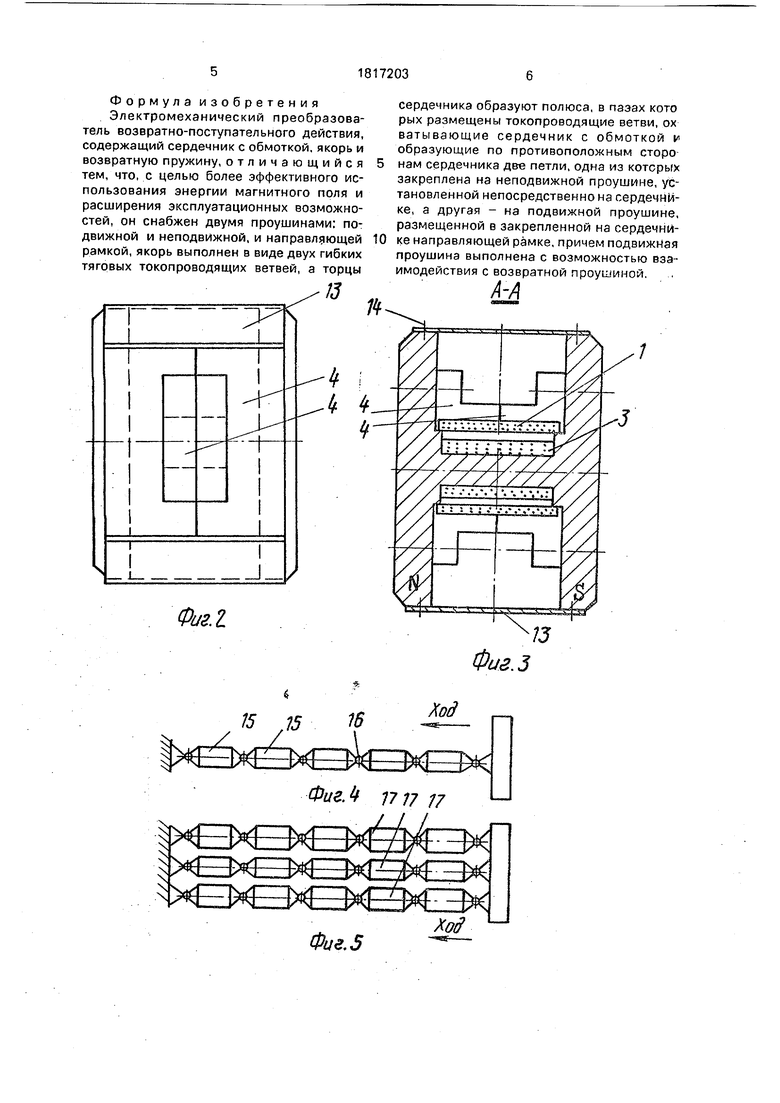
Использование: в электромашиностроении, в частности в электромагнитных исполнительных органах. Сущность изобретения: электромеханический преобразователь возвратно-поступательного действия содержит сердечник 2 с обмоткой 3, охваченный токо- проводящими ветвями 1. Эти ветви образуют по обеим сторонам сердечника две петли, одна из которых закреплена на неподвижной проушине 4, а другая - на подвижной 9. Подвижная проушина размещена в закрепленной на сердечнике направляющей рамке 8 и взаимодействуете возвратной пружиной 19. Изобретение позволяет создать на его основе высокоэффективные исполнительные органы; тяговые нити и пряди. 5 ил.
Фиг. Z
Й/.5
Фиг.З
Ход
1В IB
Фи2.6
| Электродвигатель возвратно-поступательного движения | 1984 |
|
SU1251245A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Политехнический словарь | |||
| М., Сов | |||
| энциклопедия, Электромагнитное реле, 1977, с.424. | |||
