Изобретение относится к медицинской технике и может быть использовано для физиотерапевтического воздействия, включая лечение и целенаправленную тренировку нервно-мышечных структур и органов.
Цель изобретения - снижение адаптации стимулируемых структур и органов к воздействию магнитным полем,
На фиг. 1 изображена блок-схема устройства; на фиг. 2, 3 и 4 - временные диаграммы напряжений на выходах отдельных элементов структурной схемы; на фиг. 5 - расположение элементов воздействия; на фиг.6 - временные диаграммы изменения вектора, магнитной индукции в элементах воздействия; на фиг. 7 -изменение модуля и направления результирующего вектора магнитной индукции в различные моменты времени..
Устройство для магнитотерапии содержит генераторы воздействия 1, 2 и 3, которые, в свою очередь, включают частотные модуляторы 4,8 и 12; коммутаторы 5,9 и 13; псевдослучайные импульсные генераторы 7,11 и 15; задающие генераторы 6,10 и 14. В устройство входят также усилители мощности 16,17 и 18; элементы воздействия 19, 20 и 21; пульт управления 22 фиг.1). Причем йульт управления соединен с генераторами воздействия и усилителями мощности, Второй вход каждого усилителя мощности подключен к выходу соответствующего генератора воздействия, а его выход - к соответствующему элементу воздействия. Каждый генератор воздействия состоит из соединенных между собой частотного модулятора, коммутатора и задающего генерато- .ра, а также псевдослучайного импульсного генератора, выход которого подключен к коммутатору. При этом выход каждого частотного модулятора подключен к коммутаторам других генераторов воздействия.
Устройство работает следующим образом.
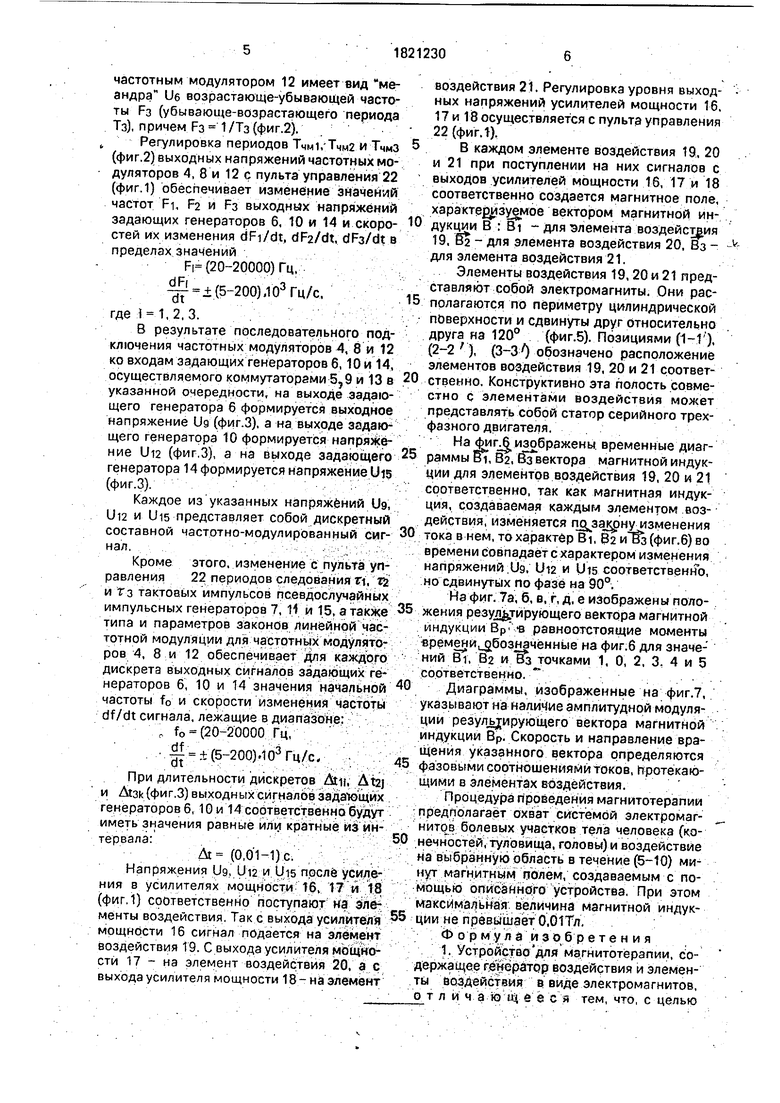
Частотный модулятор 4 (фиг.1) выраба- тывзет пилообразное напряжение Ui (фиг.2), период Тчм1 которого задается с пульта управления 22 изменением параметров времязадающий RC-цепочки частотного модулятора 4. Частотный модулятор 8 вырабатывает пилообразное напряжение Ш (фиг.2), период ТЧм2 которого также задается с пульта управления 22 изменением параметров времязадающей RC-цепочки модулятора 8;
Частотный модулятор 12 вырабатывает треугольное напряжение Us, рериодТчмЗ которого задаётся аналогичным образом с пульта управления 22 (фиг.1).
Частотные модуляторы 4, 8 и 12 выполнены таким образом, что с пульта управления 22 для каждого из них может быть задан свой тип закона изменения выходного напряжения Ui, либо Ua. либо Us (фиг.2).
Выходные напряжения Ui, Ua и Us (фиг.2) частотных модуляторов 4, .8 и 12 соответственно поступают на соответствующие коммутируемые входы коммутаторов 5,
9 и 13.
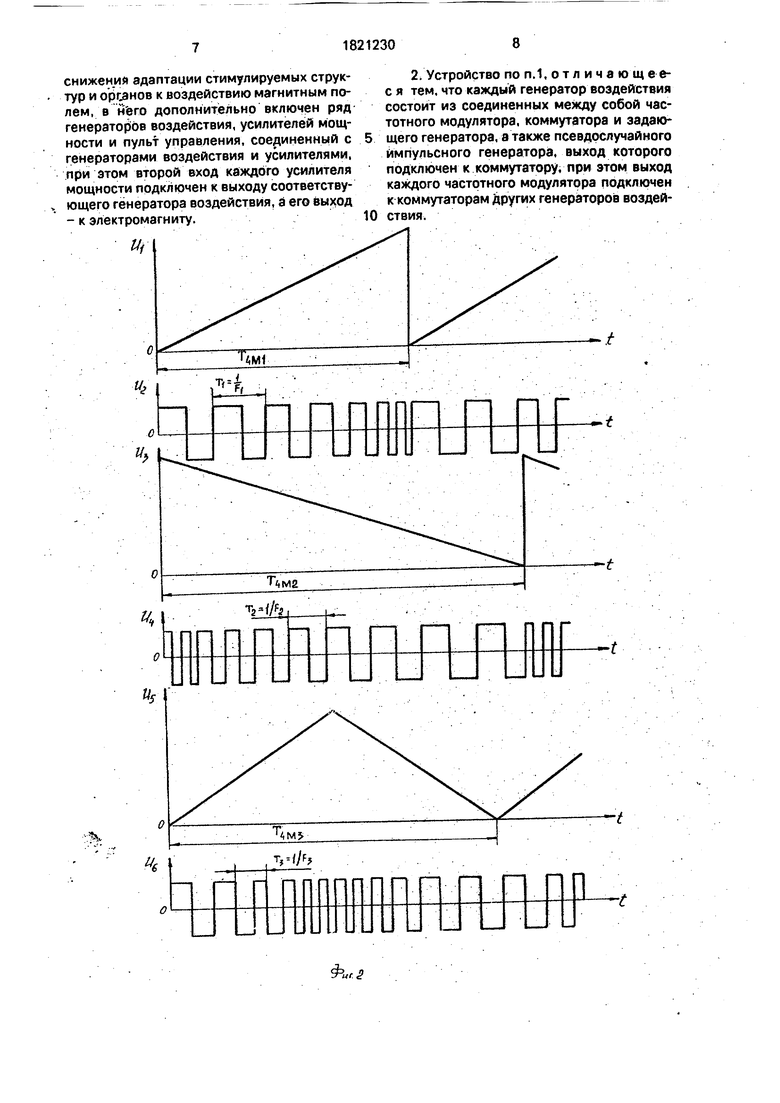
Псевдослучайные импульсные генераторы 7,11 и 15 содержат генераторы тактовых импульсов, в которых формируются напряжения Uy, Ою и Uia (фиг.З) соответст5 венно.;... .
Периоды следования этих напряжений Ti, Г2 и тз (периоды следования тактовых импульсов) задаются с пульта управления 22 и равны либо кратны значениям из интер0 вала:
г (0,01-1)с.
Указанные тактовые импульсы используются при формировании псевдослучайных последовательностей прямоугольных
5 импульсов Us. Un и U-и (фиг.З) в псевдослучайных импульсных генераторах 7, 11 и 15 (фиг.1) соответственно. Выходные напряжения . UB, Un и UH указанных генераторов - поступают на соответствующие управляю0 щие входы коммутаторов 5, 9 и 13 (фиг,1).
Коммутаторы 5,9 и 13 при каждом переходе соответствующих напряжений Us, Uii и Ui4 от низкого уровня к высокому и наоборот (при каждом переходе от О к Г и
5 наоборот) производят последовательное подключение выходов частотных модуляторов 4, 8 и 12 ко входам задающих генераторов б, 10 и 14 в выбранной очередности. В данном примере очередность подключения
0
5
выходов частотных модуляторов ко входу
задающего генератора 6 выбрана в виде: 4, .8, 12, 4, 8, 12 и т.д.; ко входу генератора 10 выбрана в виде: 8, 4. 12,8, 4, 12 и т.д.; ко входу генератора 14 в виде; 12, 4, 8,12, 4, 8 5 ит,д. , ,.... -. . ;. ; ...
Задающие генераторы 6, 10 и 14 представляют собой аналого-цифровые преобразователи напряжение-частота.
Выходное напряжение Ua (фиг.2) задаю- 0 щего генератора 6 при модуляции его только частотным модуляторбм 4 имеет вид меандра возрастающей частоты FI убывающего периода Ti), причём Fi 1/Ti фиг.2).
Выходное напряжение генератора б
при модуляции его только частотным модулятором 8 имеет вид меандра J падающей частоты-Fa (возрастающего периода tj), причем.Fz 1/Та(фиг.2). Выходное напряжение генератора б при модуляции его только
частотным модулятором 12 имеет вид меандра Ue возрастающе-убывающей частоты Рз (убывающе-возрастающего периода Тз), причем Рз 1/Тз(фиг.2).
Регулировка периодов ТЧм1, Тчм2 и ТчмЗ (фиг.2) выходных напряжений частотных модуляторов 4, 8 и 12 с пульта управления 22 (фиг.1) обеспечивает изменение значений частот Fi, F2 и Рз выходных напряжений задающих генераторов б, 10 и 14 и скоро- стей их изменения dFr/dt, dFa/dt, dP3/dt в пределах значений
Fi (20-20000) Гц,
dfi dt
+ (5-200) ,103 Гц/с,
где 1 1,2,3..
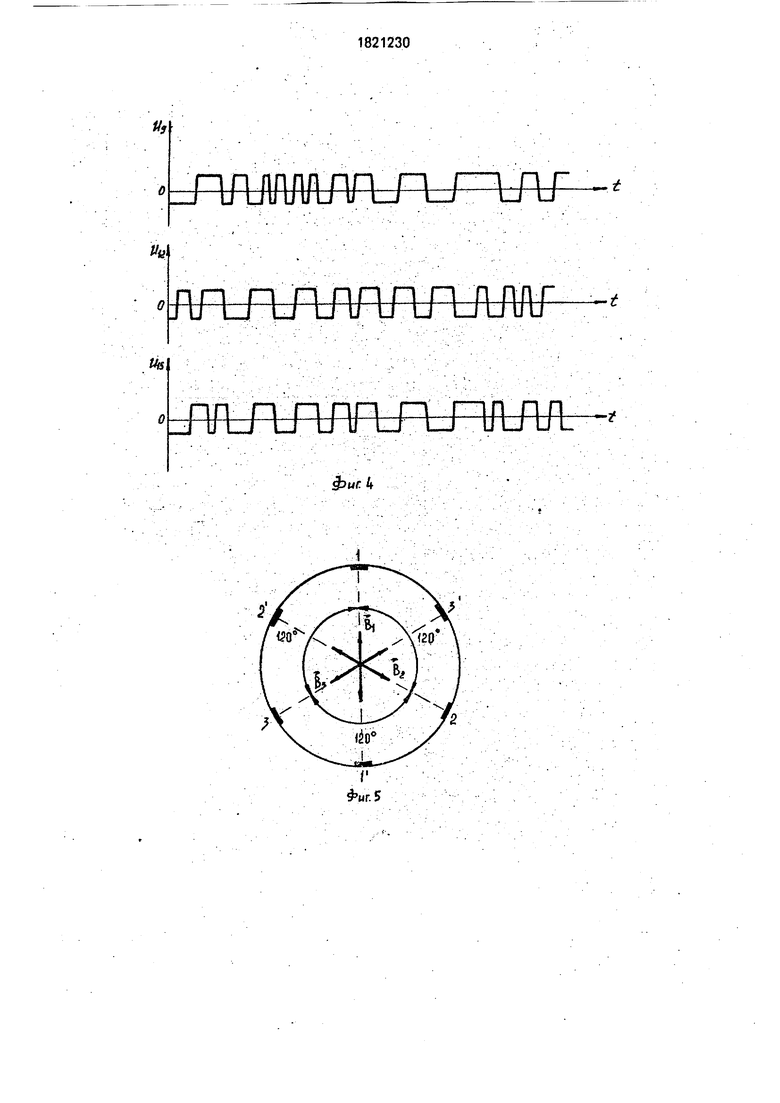
В результате последовательного подключения частотных модуляторов 4, 8 и 12 ко входам задающих генераторов 6,10 и 14, осуществляемого коммутаторами 5 9 и 13 в указанной очередности, на выходе задающего генератора 6 формируется выходное напряжение Ug (фиг.З), а на выходе задаю-1 щего генератора 10 формируется напряЖе- ние Ui2 (фиг.3), а на выходе задающего генератора 14 формируется напряжение Uis (фиг.З)/:
Каждое из указанных напряжений Ug, Ui2 и U15 представляет собой дискретный составной частотно-модулированный сигнал. .,.. . ...-. .-; .-.
Кроме этого, изменение с пульта управления 22 периодов следования Ti, Зг и Тз тактовых импульсов псевдослучайных импульсных генераторов 7, 1.1 и 15, типа и параметров законов линейной частотной модуляции для частотных модуляторов 4, 8 и 12 обеспечивает для каждого дискрета выходных сигналов задающих генераторов 6, 10 и Т4 значения начальной частоты fo и скорости изменения частоты df/dt сигнала, лежащие в диапазоне: 0 f0- (20-20000 Гц, :
. (5-200).10й Гц/с, - ; :
При длительности дискретов /4tif, At2j и Дгзк (фиг.3) выходных сигналов зада ющйх генераторов б, 10 и 14 соответственно будут иметь значения равные или кратные из интервала:. . Дг (0,0 Ы)с. : ; :
Напряжения Ug, Ui2 и.U-J5 после усиления в усилителях мощности 16, 17 и 18 (фиг.1) соответственно поетупают на 5лё менты воздействия. Так с выхода усилитбл я мощности 16 сигнал подается на элемент воздействия 19. С выхода усилителя моЩно- стй 17 - на элемент воздействия 20, а с выхода усилителя мощности 18 - на элемент
5
5
0
/
0 5 :
-
5 0
5
.
воздействия 21. Регулировка уровня выход- ных напряжений усилителей мощности 16, 17 и 18 осуществляется с пульта управления 22(фигЛ).
В каждом элементе воздействия 19, 20 и 21 при поступлении на них сигналов с. выходов усилителей мощности 16, 17 и 18 соответственно создается магнитное поле, характеризуемое вектором магнитной ин- . дукции В : Bi - для элемента воздейств.ия 19. §2 - для элемента воздействия 20, Вз - -v- для элемента воздействия 21.
Элементы воздействия 19,20 и 21 представляют собой электромагниты. Они располагаются по периметру цилиндрической поверхности и сдвинуты друг относительно друга на 120° (фиг.5). Позициями (1-1), (2-2 ), ( обозначено расположение элементов воздействия 19, 20 и 21 соответственно. Конструктивно эта полость совместно с элементами воздействия может представлять собой статор серийного трех- . фазного двигателя.
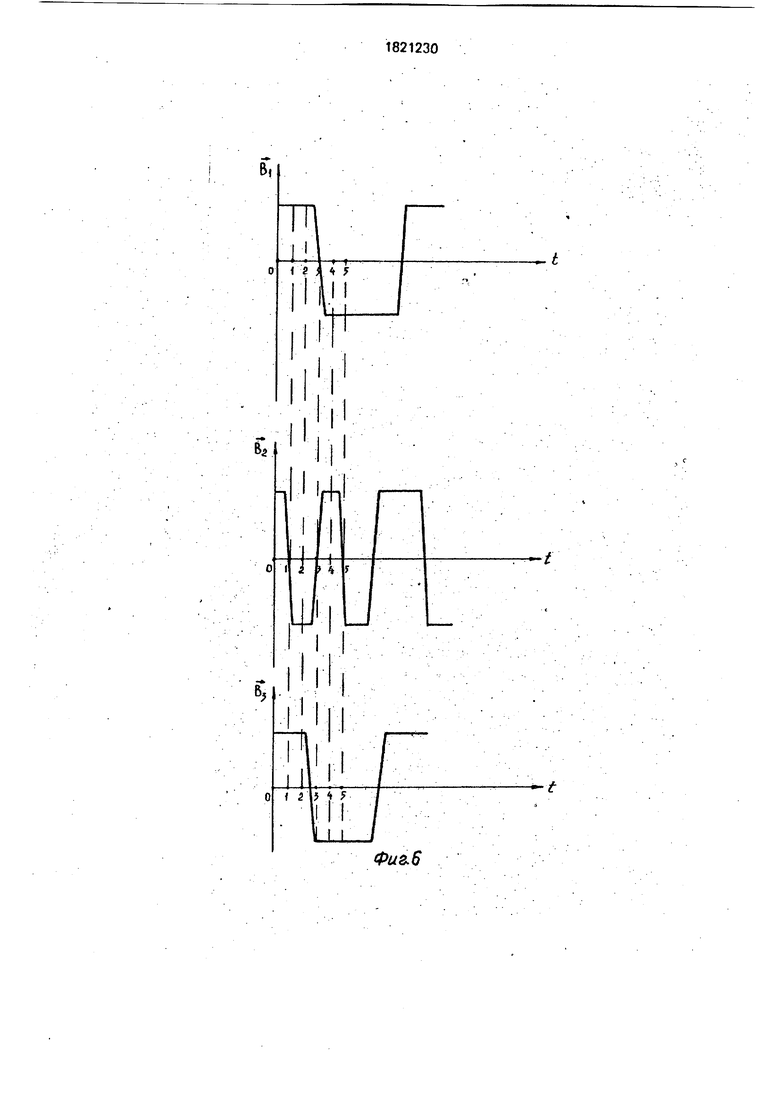
На фиг.6 изображены, временные диаграммы Bi, B2, Вз вектора магнитной индукции для элементов воздействия 19, 20 и 21 соответственно, так как магнитная индукция, создаваемая каждым элементом воздействия, изменяется по задрну изменения тока в нем, то характер Bi, 02 (фиг.6) во времени совпадает с характером изменения напряжений;Ug, Urz и Uis соответственно, но сдвинутых по фазе на 90°.
На фиг. 7а, б, в, г, д, е изображены положения результирующего вектора магнитной индукции равноотстоящие моменты времени бозначённые на фиг.6 для значений В г, В2 и.§з точками 1, 0, 2, 3, 4 и 5 сортветственно. ..
Диаграммы, изображенные на фиг,7, указывают на наличие амплитудной модуляции результирующего вектора магнитной . индукции Вр. Скорость и направление вращения указанного вектора определяются фазовыми соотношениями токов, протекающими в элементах воздействия.
Процедура проведения магнитотерапии ; предполагает охват системой электромаг- нитов болевых участков тела человека (конечностей, туловища, головы) и воздействие на выбранную область в течение (5-10) минутмагнитным полем, создаваемым с помощью описанного устройства. При этом максйма Шая величина магнитной индукции не превышает 0,01Тл.:
Ф о р м у л и и з О б р е т е н и я
1. Устройствр дпя мзгнитотёрапии, содержащее геиератор воздействия и элементы воздействия в виде электромагнитов, от л и ч а ю щ е ё с я тем, что, с целью
снижений адаптации стимулируемых структур и органов к воздействию магнитным полем, в н его дополнительно включен ряд генераторов воздействия, усилителей мощности и пульт управления, соединенный с генераторами воздействия и усилителями, при этом второй вход каждого усилителя мощности подключен к выходу соответствующего генератора воздействия, а его выход - к электромагниту.
щ
2. Устройство по п.1, о т л и ч а ю щ е е- с я тем, что каждый генератор воздействия состоит из соединенных между собой частотного модулятора, коммутатора и задающего генератора, а также псевдослучайного импульсного генератора, выход которого подключен к коммутатору, при этом выход каждого частотного модулятора подключен к коммутаторам других генераторов воздействия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для магнитотерапии | 1990 |
|
SU1804863A1 |
| ЭЛЕКТРОСТИМУЛЯТОР | 1990 |
|
RU2020981C1 |
| ЭЛЕКТРОСТИМУЛЯТОР | 1989 |
|
RU2020980C1 |
| Устройство для отпугивания птиц | 1988 |
|
SU1577739A1 |
| Устройство для стимуляции функционального состояния биологического объекта | 1991 |
|
SU1831343A3 |
| Способ измерения дальности и радиальной скорости в РЛС с зондирующим составным псевдослучайным ЛЧМ импульсом | 2017 |
|
RU2688921C2 |
| УСТРОЙСТВО ДЛЯ СТИМУЛЯЦИИ И/ИЛИ КОРРЕКЦИИ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ БИОЛОГИЧЕСКОГО ОБЪЕКТА | 1993 |
|
RU2033211C1 |
| Автоматическое устройство для отпугивания птиц | 1989 |
|
SU1727766A1 |
| Устройство для снижения резистентных свойств микроорганизмов | 2020 |
|
RU2733579C1 |
| Автоматическое устройство для отпугивания птиц со сканирующей диаграммой звукового излучения | 1990 |
|
SU1832002A1 |

Использование: изобретение относится к медицинской технике и может быть использовано для физиотерапевтического воздействия, включая лечение и целенаправленную тренировку нервно-мышечных структур и органов. Цель изобретения-снижение адаптации стимулируемых структур и органов к воздействию магнитным полем. Устройство для магнитотерапии содержит генераторы воздействия 1, 2 и 3. которые в . свою очередь включают частотные модуля торы 4, 8 и 12, коммутаторы J. 9 и 13. псевдослучайные импульсные генераторы 7, 11 и 15, задающие генераторы 6, 10 и 14. В устройство входят также усилители мощности 16, 17и 18, элементы воздействия 19,20 и 21; пульт управления 22. Причем пульт управления соединен с генераторами воздействия и усилителями мощности, Второй вход каждого усилителя мощности подключен к выходу соответствующего генератора воздействияга его выход - к соответствующему элементу воздействия. Каждый генератор воздействия состоит из соединенных между собой частотного модулятора, коммутатора и задающего генератора, а также псевдослучайного импульсного генератора, выход которого подключен к коммутатору. При этом выход каждого частотного модулятора подключен к коммутаторам других генераторов воздействия. 1 з.п.ф-лы, 7 ил, ел С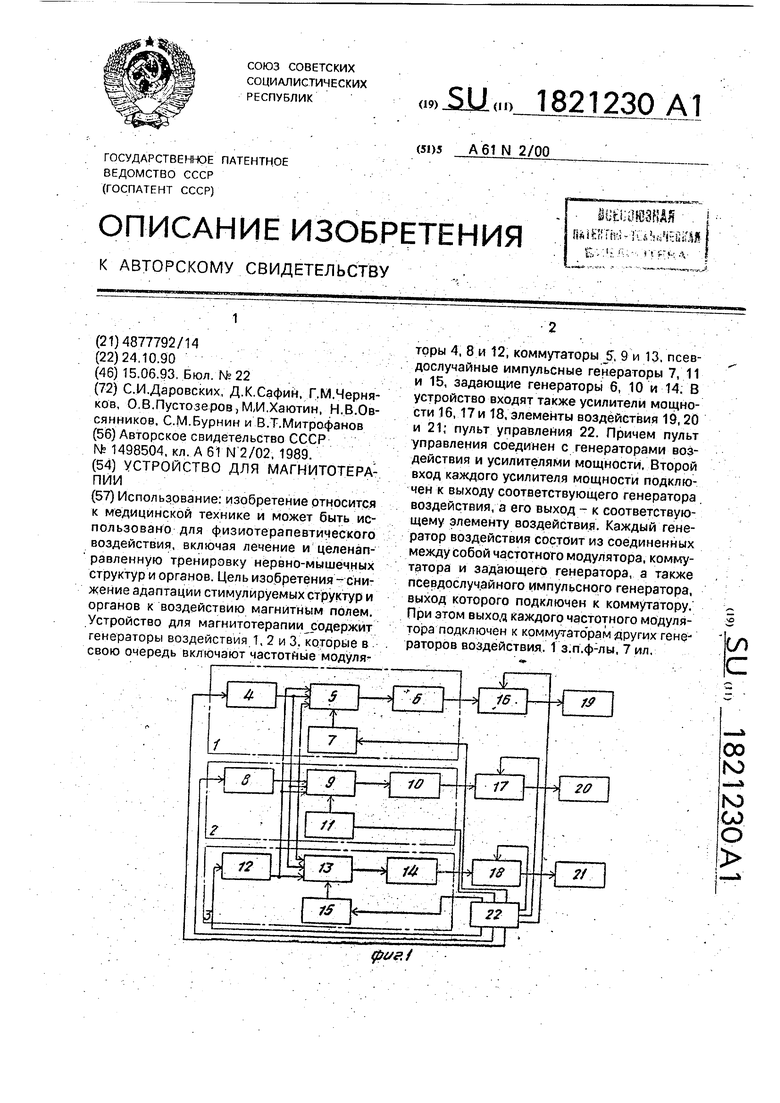
TWI
И
Vffo
- /
и
I/
и 1Ш1ЛШ1Г1 Ги
П
Atai-t
flftFd
lUinTLTU
flft
feftf
Sfe//: 3
и t ti
л
tffl1
- t
4 3
ffiM
ҐLAA JlJTJLrUl-QJLF
-r
MҐTJlMfi-TLn-Af
Jl/l /bTUlfWlJEAJ
meg
oczizei
-
Фи&6
/. г
| Устройство для магнитотерапии | 1987 |
|
SU1498504A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
