фиг.7
Изобретение относится к космическим аппаратам для возвращения в атмосферу Земли, торможения и посадки.
Целью изобретения является повышение надежности обнаружения капсулы в случае ее посадки на воду и упрощения такелажных работ при подъеме капсулы с водной поверхностью.
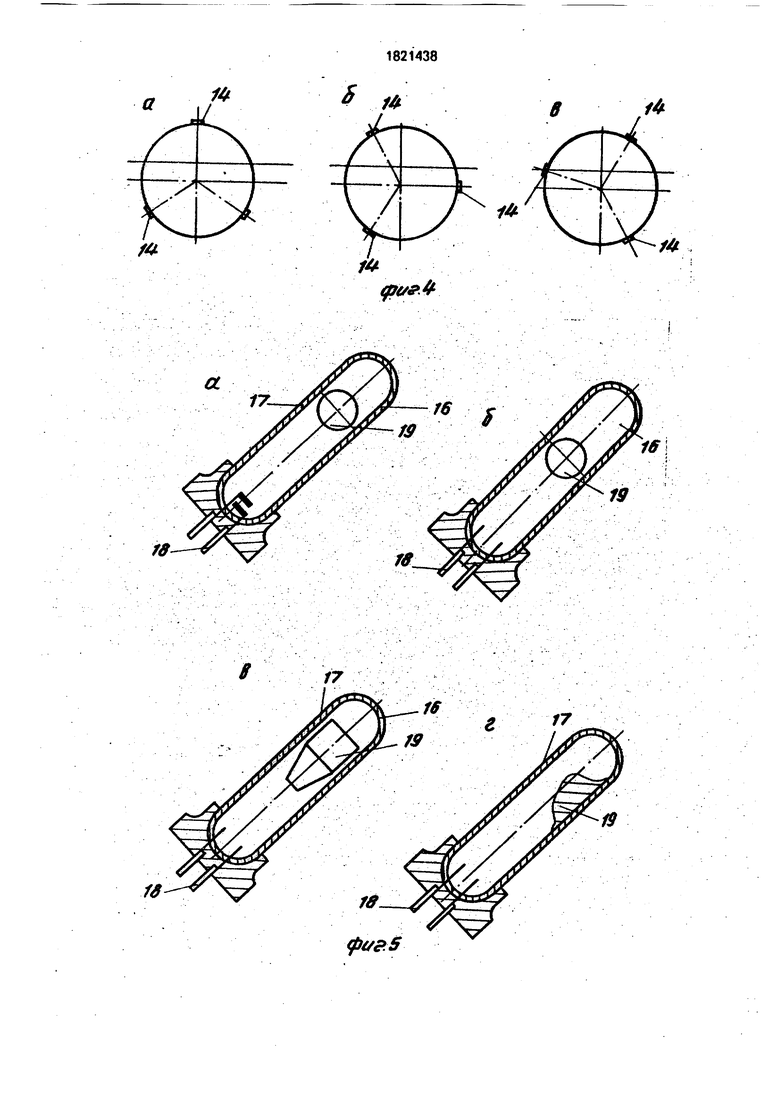
На фиг.1 показан общий вид капсулы в исходном положении; на фиг,2 - общий вид капсулы после отделения двигателей тормозного и стабилизации и сброса теплозащиты; на фиг.З проиллюстрирован случай приводнения капсулы; на фиг.4 - возможные варианты положения светомаятника от- носительно уровня воды; на фиг.5 - варианты возможного исполнения датчика вертикали; на фиг.6 - рабочие положения датчика вертикали; на фиг.7 - конструкция поплавка.
Баллистическая возвращаемая капсула
1 включает корпус 2 со сбрасываемой теплозащитой 3, между которыми размещена теплоизолирующая надувная оболочка 4, связанная с источником давления 5. Корпус
2 включает корпус 6 отсека полезной нагрузки 7 и хвостовую юбку 8. Корпус полезной нагрузки 7 имеет фланец 9 для крепления теплозащиты 3, хвостовой юбки 8 и гермоднища 10, являющегося донной частью хвостовой юбки 8.
Теплоизолирующая надувная оболочка 4 разбита в продольном и поперечном направлениях на секции 11, связанные между собой калиброванными отверстиями или клапанами (не показаны).
Капсула 1 при помощи подвески в виде тросов 12 связана с парашютной системой 13. На боковой поверхности теплоизолиру- ющей надувной оболочки 3 установлены светомаяки 14 по крайней мере три, равно- мерно в окружном направлении.
На фиг.З показана капсула 1 в случае ее приводнения. Наличие теплоизолирующей надувной оболочки 3, выполняющей функ- ции не только теплоизоляции, но и системы спасения при наводнении, обеспечивает плавучесть капсулы. При этом для успешного поиска капсулы в сумеречное и ночное время необходимо, чтобы хотя бы один све- томаяк находился в надводном положении в максимально верхнем положении.
Подвеска в виде тросов 12 заглублена и удерживается на плаву поплавком 15.
Для более эффективного ислользова- ния источников питания целесообразно, чтобы из трех, например, светомаяков работал один или в крайнем случае два. Для достижения этой цели каждый светомаяк снабжен датчиком вертикали 16 (фиг.5). На
фиг.5 представлено несколько вариантов возможного исполнения датчика вертикали 16, который включает корпус 17 в виде, например, трубки, притупленной с концов по сфере. Трубка должна быть герметизирована. Внутри корпуса 17 размещены электрические контакты 18 и подвижной груз 19 в виде шарика (фиг.5, а, б), конуса (фиг.5, в) или в виде капли ртути (фиг.5, г). Электрические контакты 19 могут быть выполнены в виде пластин (фиг.5, а) или штырей (фиг.5, б, в, г).
На фиг.6 показаны рабочие положения датчика вертикали 16: фиг.6, а - контакты замкнуты (каплей ртути) и фиг.6, б - контакты разомкнуты.
Устройство работает следующим образом..
По команде системы управления КА баллистическая возвращаемая капсула 1 отделяется от КА с заданной скоростью. После отхода капсулы 2 от космического аппарата на безопасное расстояние система автоматики включает тормозную двигательную установку, обеспечивающую сход капсулы с орбиты. На участке отхода от КА и во время работы ТДУ двигатели обеспечивают стабилизацию положения капсулы в пространстве.
После окончания работы ТДУ двигатели вместе с рамой отделяют от капсулы при помощи устройства отделения.
На нисходящем участке траектории производится раскрытие парашютной системы 13, включающей тормозной (Н 18...20 км) с основной (Н .10 км) парашюты. При раскрытии основного парашюта одновременно сбрасывается теплозащита 3,. задействуете система поиска капсулы, включающая радиотехническую систему, светомаяк с фотоэлементом и дипольные отражатели в виде, например, трех кассет над- дувается теплоизолирующая оболочка 4.
После раскрытия основного парашюта спуск капсулы 1 стабилизируется. При подходе к земной поверхности командно-исполнительное устройство с датчиком высоты выдает команду на задействование двигателей мягкой) посадки, которые снижают скорость спуска капсулы до расчетного минимума. Наличие теплоизолирующей надувной оболочки 4 обеспечивает теплоизоляцию полезной нагрузки 7, а также плавучесть капсулы при посадке на воду.
При приводнении капсула 1 займет положение, показанное на фиг.З. При этом светомаяки окажутся в одном из положений, представленных на фиг.4. Поскольку с каждым из светомаяков установлен датчик вертикали, то работать будут не все светомаяки, а только те, которые находятся в надводном состоянии.
При касании о земную поверхность (в рассматриваемом случае о воду) производится отстрел парашютной системы путем отрезки строп и антенного кабеля радиотехнической системы. Если не предусмотреть специальных мер, то после приводнения тросы 12 и кабель затонут, что может привести к непредвиденным трудностям при изъятии капсулы из воды для последующей транспортировки.
Чтобы устранить эти трудности, подвеска, связывающая капсулу 1 с парашютной. системой, снабжена поплавком 15, удерживающим тросы 12 и кабель на плаву (фиг.3).
Таким образом, предложенное конструктивное исполнение баллистической возвращаемой капсулы позволяет повысить надежность обнаружения капсулы, эксплуатационные характеристики ее путем обеспечения при приводнении надводного расположения светомаяка и обеспечения
гарантированного захвата подвески капсулы для ее последующего транспортирования.
Формула изобретения
Баллистическая возвращаемая капсула, содержащая корпус и размещенный на его поверхности светомаяк для индикации местонахождения капсулы после ее посадки и подвеску для связи капсулы с парашютной
системой, отличающаяся тем, что, С целью повышения надежности обнаружения капсулы в случае ее посадки на воду и упрощения такелажных работ при подъеме капсулы с водной поверхности, капсула
снабжена по меньшей мере тремя светома- яками, размещенными равномерно по периметру капсулы, причем каждый еветомапк снабжен устройством включения, выполненным в виде контактного устройства, срабатывающего при его нахождении над водной поверхностью, а подвеска для связи капсулы с парашютной системой снабжена поплавком. 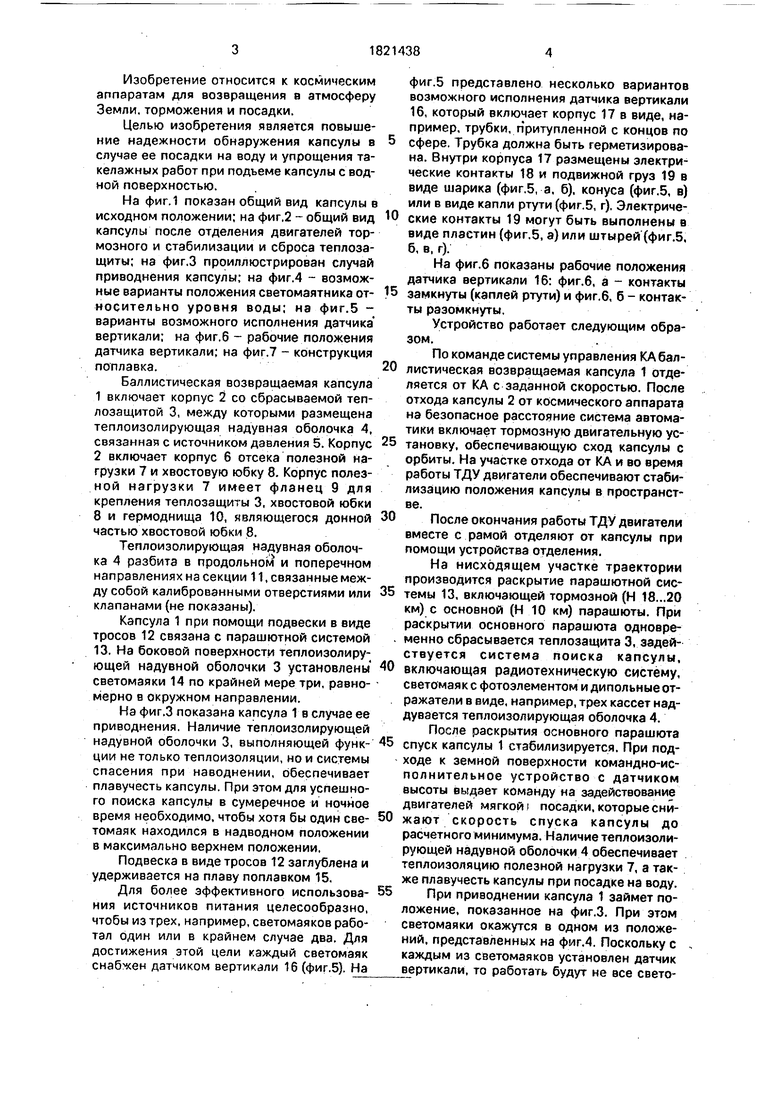

| название | год | авторы | номер документа |
|---|---|---|---|
| Баллистическая возвращаемая капсула | 1990 |
|
SU1818283A1 |
| Баллистическая возвращаемая капсула | 1990 |
|
SU1749125A1 |
| Баллистическая возвращаемая капсула | 1990 |
|
SU1821440A1 |
| Баллистическая возвращаемая капсула | 1990 |
|
SU1818285A1 |
| Баллистическая возвращаемая капсула | 1990 |
|
SU1798259A1 |
| КОМПЛЕКС ЛОЖНЫХ МОРСКИХ ЦЕЛЕЙ | 2012 |
|
RU2511211C2 |
| СПАСАТЕЛЬНАЯ АВИАДЕСАНТИРУЕМАЯ СИСТЕМА | 2019 |
|
RU2707860C1 |
| СИСТЕМА УПРАВЛЯЕМОГО СНИЖЕНИЯ И ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В АВАРИЙНОЙ СИТУАЦИИ (ВАРИАНТЫ) | 2004 |
|
RU2263613C1 |
| СУПЕРТЯЖЕЛОГРУЗНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ БЕЛОВИЦКОГО (СТЛАБ) | 2006 |
|
RU2312042C2 |
| Возвращаемый с околоземной орбиты научно-исследовательский космический аппарат | 2015 |
|
RU2634608C2 |
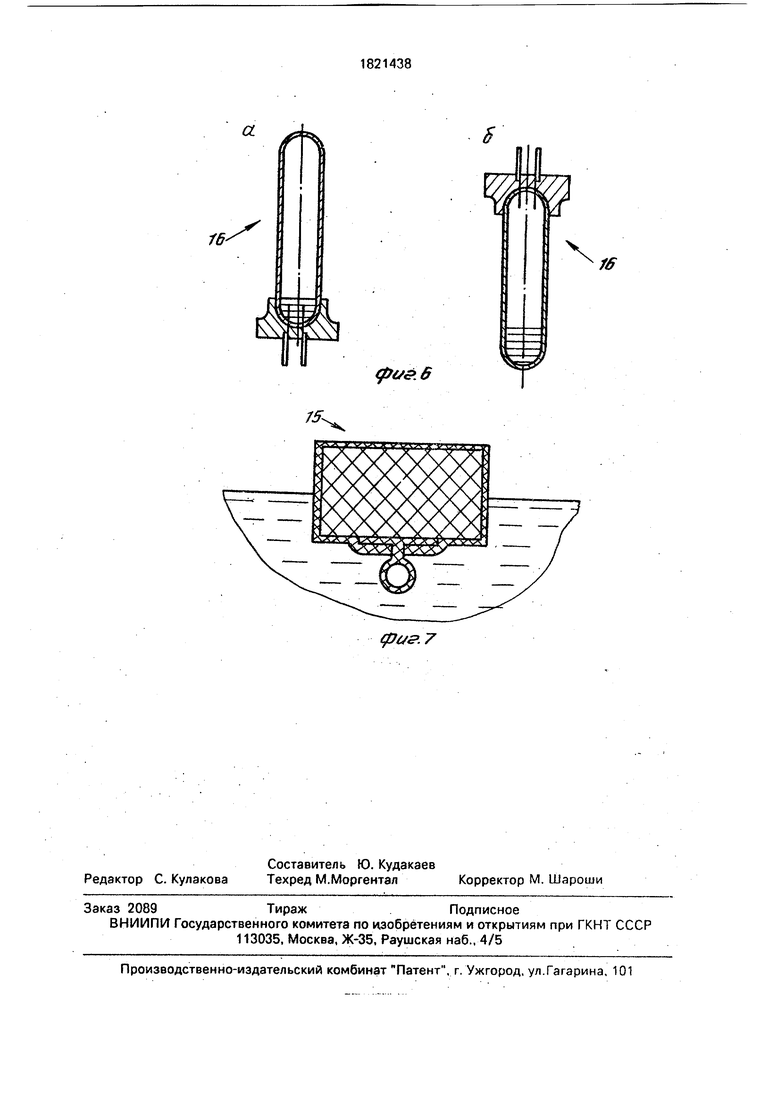
Использование: доставка полезного груза с космического объекта на Землю. Сущность изобретения: капсула (1) содержит корпус (2), снабженный сбрасываемой теплозащитой (3), и по меньшей мере три светомаяка, размещенных равномерно по периметру корпуса (2) капсулы (1). Каждый светомаяк снабжен датчиком вертикали, срабатывающим при нахождении светомаяка в близком к вертикали положении датчиком вертикали вверх. 7 ил.
1J It 7 В
It
1Z
(риг. г
/
/5
12
Ф&е.З
а
16ф(/с.6
фи. 7
| R.Mayer, HMpses, «.Spacecraft and Rockets, 20/№ 2, p.158-164 | |||
| Гэтленд К | |||
| Космонавтика ближайших лет | |||
| М.: Военное издательство Министерства обороны СССР, 1964, с.205 |
