пульсов на управляющих электродах выходного регистра в соответствии с выражением f - mn/T, где Т - время вывода строки из матрицы в регистр. mn Дх/ Л у - число сдвигов в выходном регистре, Лх - приращение функции х(у) описывающей траекторию выборки, Ду - шаг дискретизации, положительные и отрицательные значения f соответствуют сдвигам в противоположные стороны. Это обеспечивает суммирование, по крайней мере, в одном сдвигаемом элементе выходного регистра зарядов от всех фрагментов изображения, расположенных на траектории выборки. Сопоставительный анализ заявляемого решения с прототипом показывает, что он отличается от известного выбором частоты и порядка следования тактовых импульсов в соответствии с выражением f mn/T. Таким образом, заявляемый способ соответствует критерию изобретения новизна. Сопоставительный анализ заявляемого способа не только с прототипом, но и с другими способами управления ФПЗС не позволил выявить в них признаки, отличающие заявленное решение от прототипа, что позволяет сделать вывод о соответствии критерию существенные отличия.
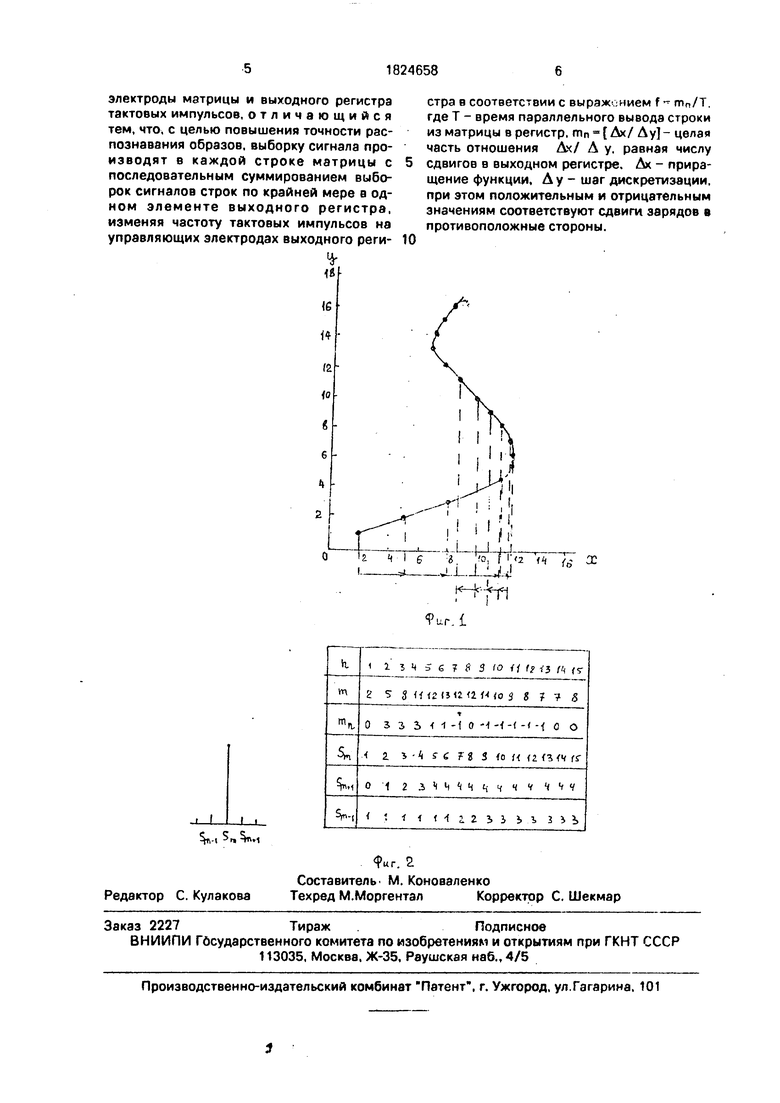
Изобретение поясняется чертежом, но котором показаны: на фиг.1 - пример изображения в виде кривой, описываемой однозначной по координате у функцией х f(y); точками показаны уровни дискретизации, определяемые дискретизацией строк в матрице ПЗС; стрелками показаны траектория движения зарядов (для нескольких сдвигов строк в матрице), которые суммируются в сдвигаемой потенциальной яме одного элемента регистра; на фиг.2 - в таблице представлены дискретизированные в относительных единицах значения аргумента - п, функции - т. приращения ппп, суммарных зарядов после окончания выборки в сдвигаемой потенциальной яме-Sm и соседних ямах.
Управление осуществляется следующим образом. В соответствии с заданной траекторией считывания на каждом шаге дискретизации по у определяются: требуемое количество и направление сдвигов mn . суммирующего элемента выходного регистра, частота сдвига f - mn/T. Например, для кривой фиг.1 при первом параллельном сдвиге строки зарядов начальная точка кривой попадает во 2-ой элемент выходного регистра: при втором параллельном сдвиге следующая точка траектории попадает в 5- ый элемент выходного регистра, m 5. Поэтому к началу передачи 2-ой строки
суммирующая потенциальная яма должна быть сдвинута вправо на 3 элемента, т.е. число сдвигов П12 3. На третьем параллельном сдвиге накапливающая яма должна находиться в 8 элементе, поэтому числа сдвигов вправо тз 3 и т.д. В результате требуемого и согласованного на каждом шаге дискретизации направления и числа сдвигов в суммирующую потенциальную
яму будут добавляться сигнальные заряды от фрагментов кривой. Небольшая часть сигнальных зарядов будет попадать в соседние потенциальные ямы. После окончания согласованной выборки все заряды выходного регистра в последовательной форме сдвигаются на выход. Выборка выходного сигнала, соответствующая суммирующему элементу, будет иметь всплеск. Данный всплеск говорит о наличии кривой на изображении. Аналогично могут решаться более сложные задачи распознавания образов по характеру отклика при считывании изображений по заданной траектории. Выходной регистр должен быть реверсивным, т.е. обеспечивать передачу зарядов в обоих направлениях, так как направление сдвига в процессе выборки может изменяться.
Заявленный способ управления просто
реализуется на стандартных матричных ФПЗС. Например, в трехфазных матричных ФПЗС с кадровым переносом изображение воспринимается секцией накопления, затем картина зарядов в параллельной форме
сдвигается в секцию хранения, из которой построчно сдвигается в выходной регистр. В отличие от стандартного управления, при котором после сдвига очередной строки в выходной регистр осуществляется ее последовзтельный поэлементный вывод, в заяв- ленном способе зарядовые пакеты в регистре сдвигаются на требуемое число элементов вправо или влево. Изменение направления сдвига достигается перекоммутацией первой и третьей фаз управляющих выходным регистром импульсов.
Заявленный способ управления позволяет осуществить считывание сигналов изображения по заданной траектории и их
0 суммирование, по крайней мере, в одном элементе регистра, что соответствует алгоритмам двумерной согласованной фильтрации и распознавания образов.
5 Формула изобретения
Способ управления фоточувствительным прибором с зарядовой связью, состоящим из матрицы фоточувствительных элементов и выходного сдвигового регистра реверсивного типа, включающей подачу на
электроды матрицы и выходного регистра тактовых импульсов, отличающийся тем, что, с целью повышения точности распознавания образов, выборку сигнала производят в каждой строке матрицы с последовательным суммированием выборок сигналов строк по крайней мере в одном элементе выходного регистра, изменяя частоту тактовых импульсов на управляющих электродах выходного реги Мстра в соответствии с выражением f ™ mn/T. где Т - время параллельного вывода строки из матрицы в регистр, mn - Ах/ Ду - целая часть отношения Ах/ А у. равная числу
сдвигов в выходном регистре. Ах - приращение функции, А у - шаг дискретизации, при этом положительным и отрицательным значениям соответствуют сдвиги зарядов в противоположные стороны.
Применение: изобретение относится к области фоточувствительных микросхем, в частности к способу управления ФПЗС, и может быть использовано в автоматике и робототехнике для обработки изображений. Сущность изобретения: распознавание образов на изображении, описываемых одноИзобретение относится к области фоточувствительных микросхем, в частности к способу управления ФПЗС и может быть использовано в автоматике и робототехнике для обработки изображения. Целью изобретения является повышение точности распознавания образов на изображении, описываемых однозначными функциями по вертикальной координате за счет согласованных с заданной траекторией выборки и накоплении информации. значными по кооолинате ФУНКЦИЯМИ, за счет согласованной с заданной траекторией выборки и накопления информации. Способ управления фоточувствительным прибором с зарядовой связью, состоящим из матрицы фоточувствительных элементов и выходного сдвигового регистра, допускающим передачу информации в обоих направлениях, включает подачу на электроды матрицы и регистра управляющих тактовых импульсов. Новым в способе управления является то, что тактовые импульсы в регистре имеют изменяемые таким образом частоту (или число Импульсов) и порядок следования, что перед сдвигом n-й строки матрицы в регистр в нем осуществляется mn сдвигов, где mn Ax - дискретизированное приращение функции, описывающей траекторию выборки, Ах - шаг дискретизации по х, что обеспечивает суммирование в одной сдвигаемой потенциальной яме зарядов от всех фрагментов изображения, расположенных на .траектории выборки. 2 ил. Поставленная цель достигается тем, что в известном способе управления фоточувствительным прибором с зарядовой связью, состоящим из матрицы фоточувствительных элементов и выходного сдвигового регистра реверсивного типа, выборку сигнала производят в каждой строке матрицы с последовательным суммированием выборок сигналов строк, по крайней мере, в одном элементе выходного регистра, изменяя частоту и порядок следования тактовых им00 ю -N о ел 00
& 1
(2
ю
6
б
4
2
m
m.
5и
,1
i i t i
Sjn.,
Vt 5r,
Редактор С. Кулакова
Pur. 2
Составитель М. Коноваленко Техред М.МоргенталКорректор С. Шекмар
.- L-J-L+J,-тG . /°. Т 2 1 (о
LLJLJ U
.i
rHfl
1 I 4 s б 7 8 3 Ю Ц ff i) и fs2 S S ( S 8 7
0 3 3 3 1 -1 0 H -(( О О
012i lii(HЈl-44V lrV
fff l2.23.1b.3i)
| Секен К., Томпсет М | |||
| Приборы с зарядовой связью | |||
| М.: Мир, 1978, с.166-169 | |||
| Прибора с зарядовой связью./Под ред | |||
| Хоувэа М. | |||
| Моргана Д | |||
| М.: Энергоиздат, 1981.С.319-320 | |||
| Способ управления фотоприемником на приборах с зарядовой связью | 1984 |
|
SU1187658A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
