Изобретение относится к телевизионной автоматике и может быть использовано в автоматических телевизионных системах слежения за подвижными объектами.
Цель изобретения -уменьшение времени и повышение точности определения координат.
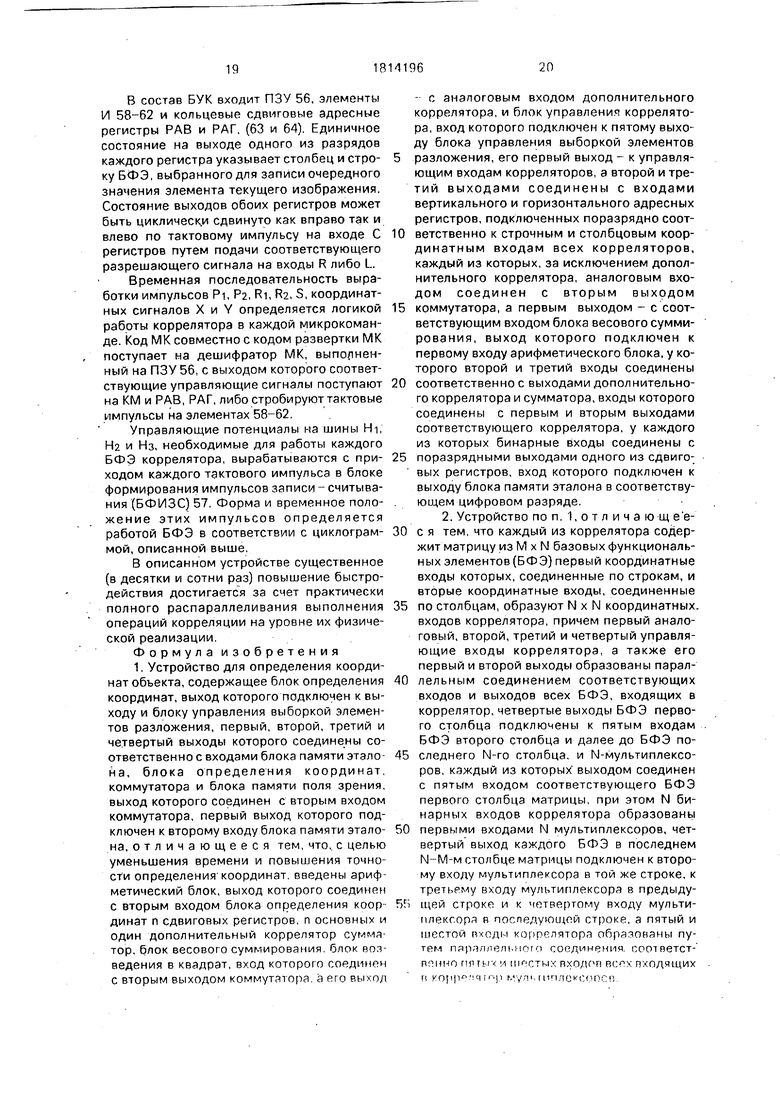
Структурная схема предлагаемого устройства приведена на фиг. 1.
Устройство содержит блок 1 управления выборкой элементов разложения поля зрения (БУВЭР), блок 2 памяти поля зрения (БППЗ), блок 3 памяти эталона (БПЭ), блок 4 определения координат (БОК), арифметический блок (АБ) 5, аналого:цифровой преобразователь (АЦП) б, сдвиговые регистры (СР) 7, основные корреляторы (ОК) 8, дополнительный коррелятор (ДК) 9, блок управления, корреляторами (БУК) 10. сумматор 11, блок
весового суммирования (ВВС) 12, блок 13 возведения в квадрат, коммутатор 31, вертикальный, регистр адреса (РАВ) 63, горизонтальный регистр адреса (РАГ) 64.
На фиг. 2 представлена структурная схема коррелятора, который содержит мультиплексор 14, базовый функциональный Элемент (БФЭ) 15.
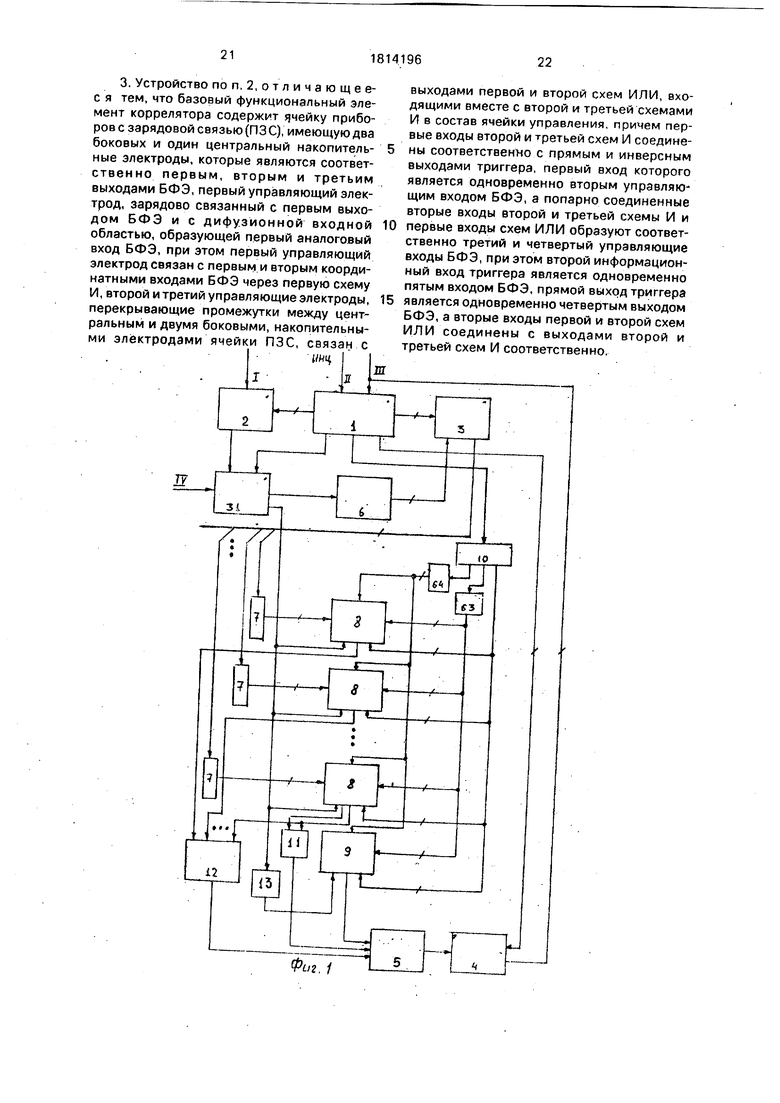
На фиг. 3 представлена функциональная схема БФЭ, содержащая ячейку ПЗС 16, центральный электрод 17 ячейки ПЗС (электрод хранения), боковые (накопительные) выходные электроды 18, 19 ячейки ПЗС, первый управляющий электрод 20 ячейки ПЗС, входную диффузную область 21 ячейки ПЗС, первую схему И 22, второй и третий управляющие электроды 23, 24 ячейки ПЗС, схемы ИЛИ 25, 26, вторую и третью схемы И 27, 28, ячейку 29 управления, триггер 30.
00
Ј
ю о
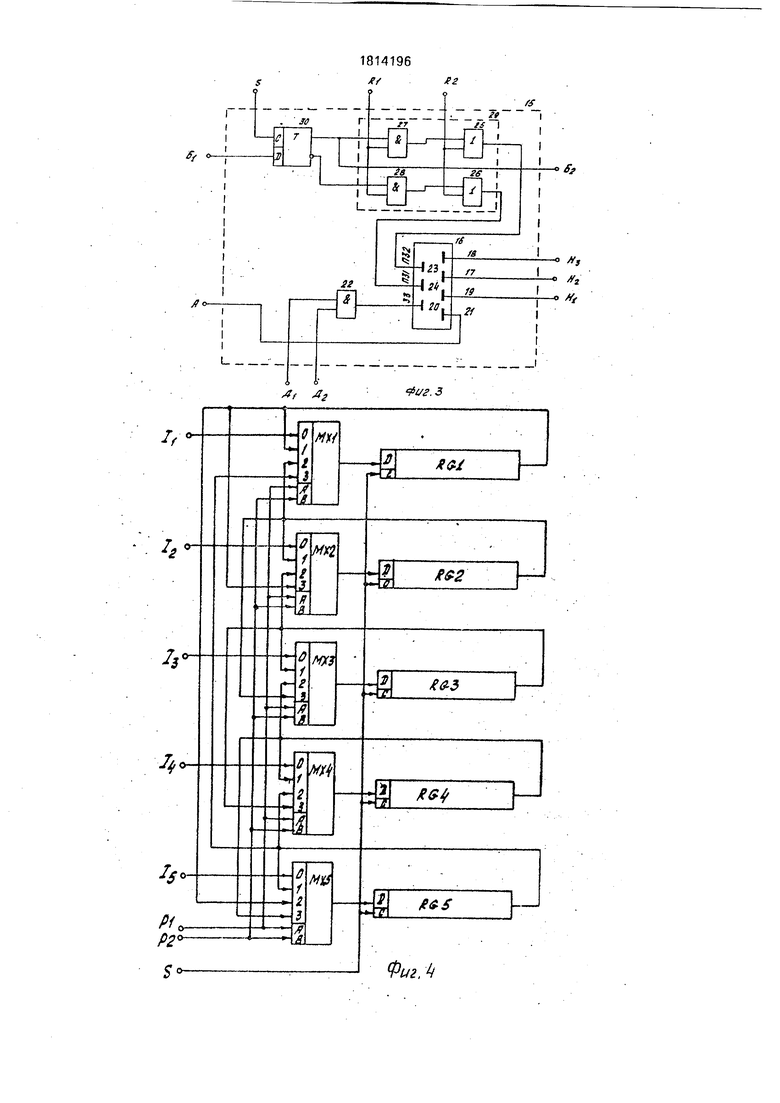
На фиг. 4 для пояснения работы коррелятора выделена его часть, осуществляющая запись, сдвиг и хранение бинарного эталонного изображения (частный случай, размер эталона ).
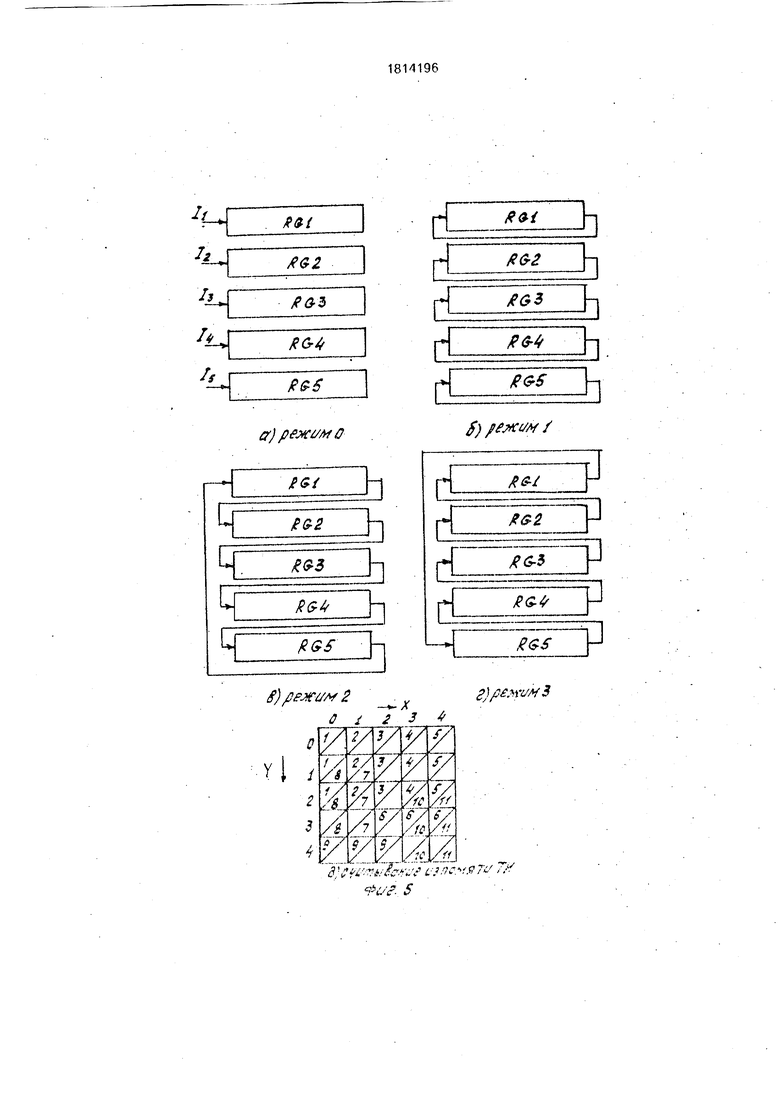
На фиг. 5 приведены рисунки, поясняющие работу схемы фиг. 4 (при ).
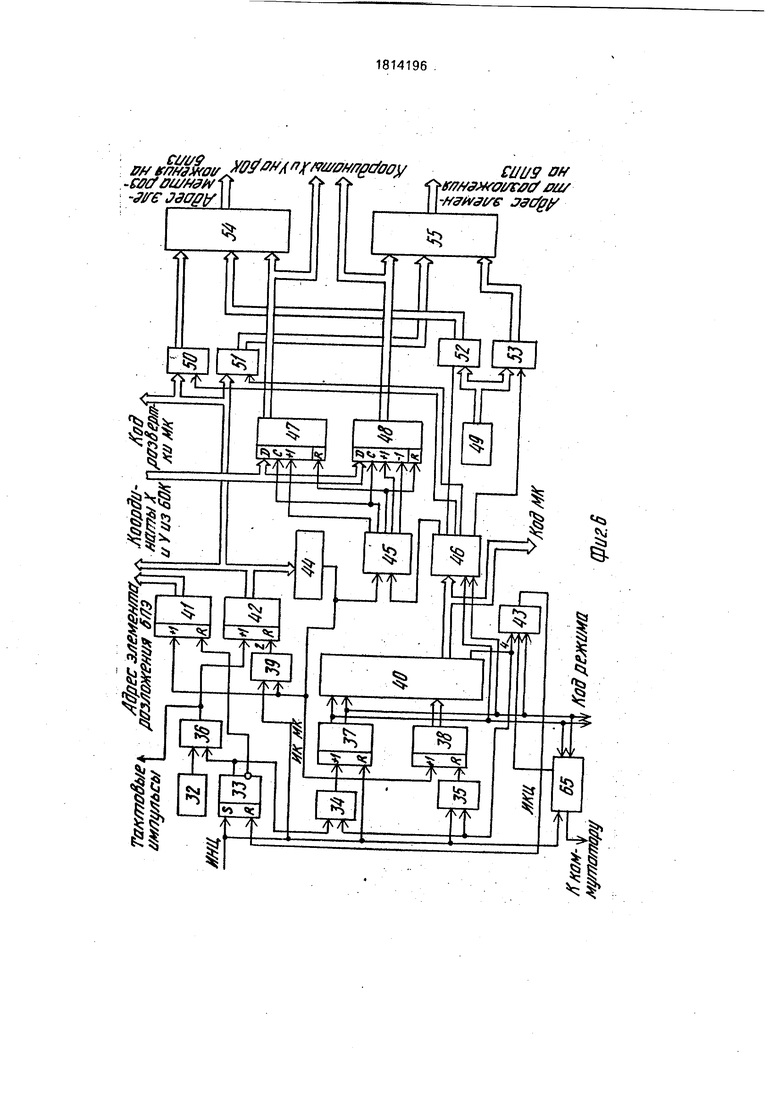
На фиг. 6 приведена функциональная схема блока управления выборкой элементов разложения (БУВЭР), содержащая генератор тактовых импульсов (ГТЙ) 32, триггер 33, элемент И 34, элемент ИЛИ 35, элемент И 36, счетчики 37, 38, элемент И 39, ПЗУ микрокоманд (МК) 40, счетчики 41, 42, элемент И 43, схему 44 совпадения, коммутатор 45, дешифратор 46, счетчики 47,48, схему 49 формирования кода предустановки, элементы И 50-53, сумматоры 54, 55, схему 65 управления коммутатором.
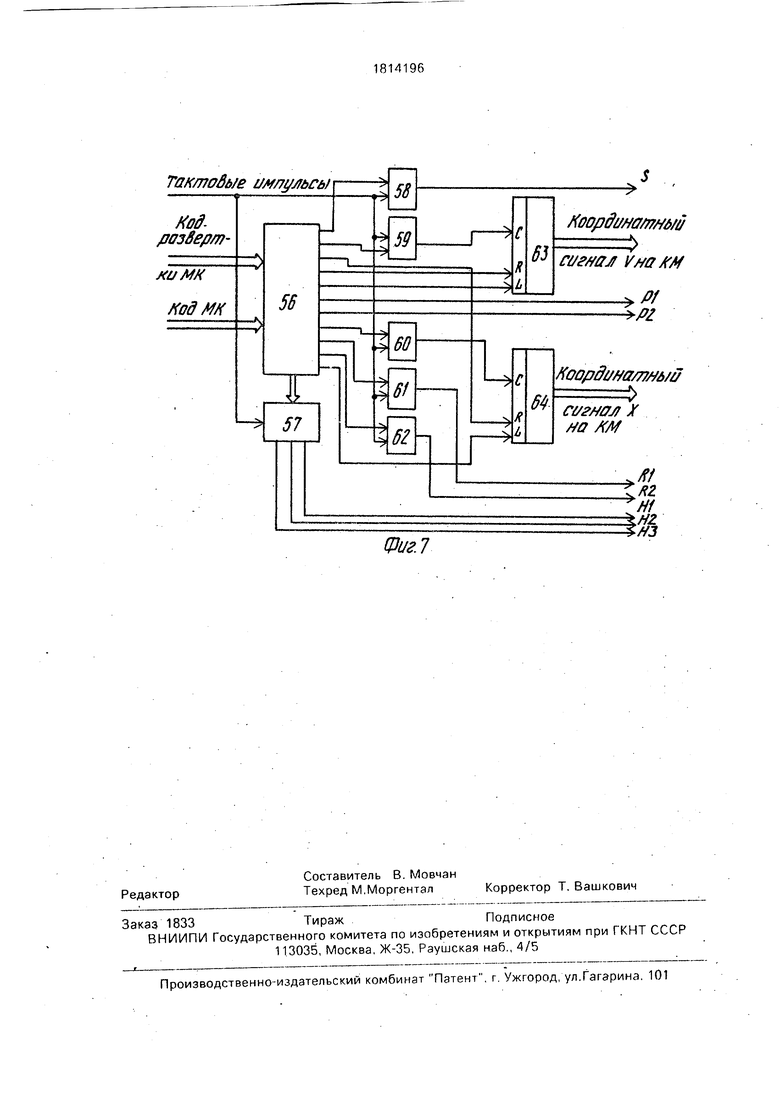
На фиг. 7 приведена функциональная схема блока управления корреляторами (БУК) вместе с горизонтальным регистром адреса (РАГ) и вертикальным регистром адреса (РАВ), содержащая постоянное запоминающее устройство (ПЗУ) 56; блок 57 формирования импульсов записи-считывания, элементы И 58-62, вертикальный регистр адреса РАВ 63, горизонтальный регистр адреса РАГ 64.
Рассмотрим сначала реализуемый в устройстве алгоритм обработки видеосигнала.
В каждом такте работа в ВУ осуществляется вычисление последовательности нормированных коэффициентов взаимной корреляции видеосигнала эталонного изображения объекта (эталона), запоминаемого в момент прицеливания с различными равными ему по размерам участками текущего изображения.
Нормированный коэффициент взаимной корреляции определяется по формуле:
2 | Ц-1К«И
N М
„ N М .1 V ss:(Mfgs(9ri)
где р- коэффициент корреляции текущего фрагмента поля зрения {fij} с эталоном {gij};
f, g - соответственно средние значения видеосигнала текущего фрагмента поля зрения и эталона;
N х М - размер матрицы отсчетов видеосигнала эталона.
случай прямоугольных матриц очевидно ().
Формула (1) может быть преобразована к виду:
N N Г1
Ч т
Јр4 1-Н11
r(2)
. Последняя формула допускает выполнение вычислений в два этапа: - на первом этапе вычисляются величины;
2 Sfij-дц ;2 ; f
на втором этапе выполняются остальные вычисления по формуле (2).
При этом вычисление второго сомножителя в знаменателе ( 2 2 gij-N2g 2) можно осуществить заранее один раз (в процессе
начального формирования эталона) и хранить его в памяти устройства в виде константы. .
В предлагаемом устройстве вычисления первого этапа осуществляются параллельно:
за время одного синхротакта с помощью специализированных блоков - корреляторов на ПЗС 8.
Рассмотрим отдельно алгоритм вычисления первого этапа на примере вычисления ковариации:
Kf.g 2 2 fij-gij i
Допустим, что отсчеты фрагмента текущего изображения {fij} хранятся в памяти в аналоговом виде, а отсчеты матрицы эталона {gij} представлены n-разрядными цифровыми кодами, т.е.
50
д,г 22s-1g(sV
s 1
где g®ij { i .- значение s-ro разряда цифрового .кода элемента gij,
В этом случае алгоритмы вычисления ковариации можно представить в виде
55 Kf.g 2 2 fijgr 2 2 fi, 22s-1g(s)U
.i 1 ) 1i J . S 1

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство распознавания изображений | 1989 |
|
SU1674153A1 |
| Телевизионное следящее устройство | 1988 |
|
SU1690217A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 1992 |
|
RU2054196C1 |
| КРЕМНИЕВЫЙ МУЛЬТИПЛЕКСОР | 2015 |
|
RU2602373C1 |
| Генератор символов | 1987 |
|
SU1550572A1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ АЗИМУТАЛЬНОЙ КОРРЕЛЯЦИОННОЙ ФУНКЦИИ | 1992 |
|
RU2060541C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ ПО БАЗОВОМУ ИНТЕГРАЛЬНОМУ МЕТОДУ (БИМ) | 1996 |
|
RU2162247C2 |

Использование: в телевизионной автоматике в автоматических телевизионных системах слежения за подвижными объектами. Сущность изобретения: в устройстве осуществляется определение координат искомого объекта на текущем изображении (ТИ) путем корреляционного сравнения последовательных фрагментов ТИ с эталонным изображением объекта (ЭЙ), заполненным заранее. Координаты фрагмента ТИ, дающего наибольшую корреляцию, выдаются в качестве координат объекта. Вычисления сводятся к многократному применению оператором двумерной кова- риации фрагмента ТИ с бинарными изображениями в разрядных средах ЭЙ. Сигнал корреляции формируется за один цикл опроса. Анализ фрагментов осуществляется в скользящем режиме. Устройство обеспечи- .вает уменьшение времени и повышение точности определения координат. 2 з.п.ф- лы, 7 ил. (/)
Далее для простоты рассуждений будем рассматривать матрицы квадратного вида (N х М). Обобщение формул и рисунков на
2 2 2
s 1 i j
f.. r,(s)..
TIJ g ij, i s 1
2s-1 K
H
где К. f g X 2. fij - есть частная кова i j
риация матрицы {fij} с бинарным изображением {g ij}, соответствующим сечению по s-му разряду кодов отсчетов видеосигнала в цифровом представлении матрицы эталона, т.е. частная ковариация (Os f, g - есть сумма элементов матрицы {fij}, соответствующих единичным элементам матрицы бинарного изображения {g s ij}. Таким образом, ковариация Kf, g может быть вычислена с помощью раздельного вычисления частных ковариа- ций фрагмента входного изображения с би- нарнымиизображениями в соответствующих разрядных срезах цифрового представления матрицы эталона и по-- следующего весового суммирования полученных частных ковариаций (с весами соответствующих двоичных разрядов).,
В свою очередь, каждая частная ковариация может быть представлена в виде суммы столбцовых ковариаций:
K(s)f,g lKfs)f,gj : )
где , gj Ј fij 9 U ковйриация.-го стол - I:
бца входного фрагмента с j-м столбцом бинарного изображения матрицы эталона в s-ом разрядном срезе, т.е. частная ковариация равна сумме ковариаций отдельных столбцов.
Для определения частных ковариаций в предлагаемом устройстве используются основные корреляторы 8, являющиеся основными функциональными элементами устройства, (Подробное описание построения и работы коррелятора приведено на стр. 15). Каждый коррелятор имеет аналоговый вход А, совокупность бинарных входов (К...,IN), входы координатных шин (, {Д г}), управляющие входы (Pi, Рг, S, Ri, R2) и два выхода (Hi, Нз). Через аналоговый вход в аналоговую память коррелятора (представляющую собой матрицу ПЗС-яче- ек) записываются отсчеты аналогового видеосигнала текущего фрагмента входного изображения. По бинарному входу в бинарную память коррелятора поступает бинарное изображение соответствующего разрядного среза эталона. На каждом из двух выходов коррелятора в момент опроса формируется соответствующая сумма отсчетов видеосигнала фрагмента входного изображения (соответственно для нулевых
и единичных элементов бинарного изображения). Из приведенного краткого описания видно, что с помощью коррелятора на ПЗС можно вычислить также и среднее значение 5 элементов входного фрагмента. Для этого необходимо либо подать на бинарный вход коррелятора опорное изображение, состоящее только из единичных элементов (в результате чего на одном из выходов в момент 0 опроса будет сформирована сумма всех отсчетов фрагментов входного изображения), либо просуммировать оба выходных сигнала коррелятора.
Рассмотрим теперь работу устройства в 5 целом.
Функционирование устройства осуществляется в тактовом режиме синхронно с работой приемного устройства телевизионного координатора. В каждом такте (кадре
0 телевизионной развертки) в блок памяти поля зрения 2 по входу 1 (см. фиг. 1) поступает видеосигнал машинного стандарта разложения изображения, отображающей поэлементное разложение изображения в поле
5 зрения координатора (изображение объекта и прилегающего фона) в виде прямоугольной матрицы постоянного формата, каждый элемент который представляет собой среднюю величину видеосигнала в пределах од0. ного элемента дискретизации (машинного дискрета).
Угловые размеры одного машинного дискрета, выраженные в элементах разложения телевизионного растра, определяются
5 выбранным масштабом разложения, начальное значение которого задается в начальный момент слежения оператором (с помощью органов ручного управления - путем стробирования изображения объекта на
0 экране видео-контрольного устройства) или автоматическим обнаружителем.
В процессе слежения на объектом величина масштаба регулируется с учетом изменения текущей дальности для обеспечения
5 независимости видеосигнала машинного стандарта разложения от дальности. , Формирование видеосигнала машинного стандарта разложения осуществляется вне ВУ в соответствующем устройстве, вхо0 дящем в состав координатора.
В частном случае функции блока памяти изображения в поле зрения может выполнять и сам телевизионный датчик изображения, если он допускает неразрушающее
5 считывание видеосигнала машинного стандарта непосредственно с приемника изображения. (Например, может быть использован матричный координатно-адре- суемый приемник с интегральным опросом
а приборах с зарядовой инжекцией (ПЗИ)
Начальное считывание эталонного изоражения объекта из блока памяти поля зрения 2 и его запоминание в основных корреляторах 8 осуществляется с приходом импульса начала цикла (ИНЩ по входу П (в момент начального выбора эталонного изображения объекта) с помощью блока управления выборкой элементов разложения поля зрения 1 по координатам, поступающим в блок 1 по входу III извне (от автома- тического обнаружителя или с органов управления оператора).
При этом блок управления выборкой элементов разложения поля зрения 1, осуществляет последовательное считывание элементов разложения видеосигнала эталонного изображения цели из блока памяти поля зрения 2 через коммутатор видеосигнала 31 и АЦП 6 в блок памяти эталона 3. Элементы разложения эталонного изображения далее поразрядно поступают с выхода блока памяти эталона на сдвиговые регистры, выходы которых поразрядно соединены с бинарными входами корреляторов. Информация об эталоне вводится в коррелятор по столбцам, при этом одновременно с обновлением информации в первом столбце записанная ранее информация сдвигается на один шаг вправо. Запись следующего столбца будет произведена после обновления информации в сдвиговых регистрах 7. Предусмотрена также возможность независимого ввода эталона в блок памяти 3 извне по входу IV. Такая необходимость может возникнуть при априорном задании эталонного изображения или при обновлении его в процессе слежения.
Определение частных ковариаций Kf.g осуществляется в соответствующих основных корреляторах 8, в каждый из которых через аналоговый вход поэлементно поступает один и тот же фрагмент входного изображения.
В момент опроса корреляторов полученные частные ковариаций поступают на соответствующие входы блока весового суммирования 12, где они умножаются на веса соответствующих двоичных разрядов и суммируются. В результате на выходе блока весового суммирования вырабатывается сигнал ковариаций фрагмента входного изображения с эталоном.
Одновременно в сумматоре 11 осуществляется суммирование обоих выходных сигналов одного из основных корреляторов, в результате чего на .выходе сумматора 11 формируется сигнал суммы фрагментов входного изображения:
N N
Z 2 f:
N2f
Формирование слагаемого S 2f2ij
i i осуществляется с помощью блока возведения в квадрат и дополнительного коррелятора 9, В бинарной памяти дополнительного коррелятора 9 постоянно хранится изображение, все элементы которого имеют значение единица (возможен также и второй способ осреднения, упомянутый выше, см. стр. 12, путем суммирования сигналов на обоих выходах коррелятора).
Таким образом, на выходе дополнительного коррелятора будет сформирована сумма квадратов всех элементов текущего фрагмента входного изображения.
Все вычисления первого этапа выполняются одновременно за .один цикл опроса корреляторов.
В результате на входах арифметического блока 5 присутствуют все операнды, необходимые для определения по формуле (2)
нормированного коэффициента взаимной корреляции текущего фрагмента входного изображения с эталоном..
Получаемый в результате вычислений коэффициент корреляции с выхода арифметического блока, поступает в блок определения координат 4, на другой вход которого из блока управления выборкой элементов разложения поля зрения 3 поступают коды координат текущего фрагмента входного
изображения в поле зрения координатора. Для получения нового значения коэффициента корреляции необходимо произвести относительный сдвиг фрагмента текущего изображения относительно эталона, после
чего цикл работы вычислительного устройства повторяется.
В блоке определения координат каждое новое значение коэффициента корреляции сравнивается по величине с наибольшим из
полученных ранее коэффициентов. Если новое значение больше запомненного ранее, то оно запоминается в регистрах блока определения координат вместе с координатами соответствующего фрагмента текущего
изображения.
После завершения просмотра и корреляционной обработки всех возможных взаимных положений фрагментов текущего и эталонного изображений на выходе блока определения координат будут присутствовать координаты фрагмента, имеющего наиб о л ьшу ю корреляцию с эталоном. Полученные координаты выдаются из ВУ на
привода системы слежения в качестве координат объекта.
В предлагаемом устройстве процедура относительного перемещения и сравнения эталонного и текущего изображений реализуется в основных корреляторах 8, построение и работа которых описаны ниже.
Коррелятор 8 (фиг. 2) работает следующим образом.
Как видно из схемы, представленной на фиг. 2, совокупность базовых функциональных элементов (БФЭ) 15 образует N линейных корреляторов по М ячеек в каждом из них,
Аналоговый сигнал текущего изображения подается на аналоговый вход А коррелятора, соединенный с аналоговыми входами всех БФЭ. Выбор ячейки, в которую производится запись текущего отсчета видеосигнала в данный момент времени, определяется состоянием координатных шин коррелятора. При подаче уровня 1 на горизонтальную и вертикальную координат- ные шины открывается для записи БФЭ, соответствующий пересечению этих координат шин.
Запись бинарного сигнала в соответствующем разрядном срезе эталонного изображения, производится на входы 1ч ... IN мультиплексоров 14, выходы которых соединены С бинарными входами линейных корреляторов, образованных последовательным (вдоль строк) соединением БФЭ. Информация об эталоне, как уже упоминалось, вводится в коррелятор по столбцам, причем за один такт записи (по сигналу на втором S (управляющем) входе коррелятора обновляется информация об эталоне в первых БФЭ линейных корреляторов, образующих левый столбец матрицы БФЭ. Информация, записанная ранее в остальные БФЭ матрицы, также обновляется путем перезаписи информации из предыдущего (левого) столбца в последующий (правый) столбец, т.е. путем одновременного сдвига всей запомненной ранее информации на 1 шаг вправо.
После записи текущего и эталонного изображения в коррелятор производится взятие частной ковариации , g. сигнал которой формируется на первом Hi и третьем Нз выходах коррелятора при подаче уп- равляющих сигналов на третий RI и четвертый R2 (управляющие) входы. (Детальное пояснение механизма формирования выходного сигнала приведено далее при описании БФЭ и линейных корреляторов, см. стр. 19).
Для взятия очередного значения ча°ст- ной ковариации необходимо осуществить
относительный сдвиг текущего изображения и эталона.
Взятие каждого нового значения ковариации , g требует предварительной за- 5 писи фрагмента текущего изображения в корреляторы, которое соответствует очередному сдвигу текущего изображения относительно эталона. При этом возможна оптимизация режима работы коррелятора,
0 которая заключается в следующем.
Последовательный просмотр фрагментов входного изображения осуществляется под управлением блока 1 путем строчно- кадрового сканирования: сначала выбирают5 ся фрагменты в направлении строки с заданным шагом, по завершении очередной строки осуществляется шаг вниз и затем просматриваются в противоположном направлении фрагменты следующей строки и т.д.
0 Поскольку шаг сканирования определяют точность определения координат положения объекта, то обычно его стараются сделать по возможности меньше, вплоть до одного элемента видеосигнала машинного
5 стандарта разложения. В результате любые два соседних по очередности выборки фрагмента изображения имеют значительное перекрытие, поэтому для осуществления определенного таким образом пофрагментно0 го скользящего анализа входного изображения нет необходимости считать полностью каждый очередной фрагмент из блока памяти поля зрения.
Для этого достаточно присвоить новые
5 номера строкам (или столбцам) предшествующего фрагмента, являющимся общими для предшествующего и нового фрагментов, а затем считать из блока памяти поля зрения недостающие новые строки (или столбцы)
0 нового фрагмента изображения с присвоением им соответствующих номеров.
В качестве иллюстративного примера рассмотрим ситуацию когда фрагмент изображения, состоящий из М столбцов, после5 довательно смещается вправо на один столбец на каждом шаге: , Пусть первый фрагмент записан в массиве памяти из М сегментов (по одному сегменту на столбец) с начальной нумерацией
0 сегментов: 1,2, 3, .... М-1, М,
Перенумерация сегментов памяти после первого сдвига вправо получается из начальной нумерации циклическим сдвигом на один элемент вправо: М, 1,2, 3, ..., М-1.
5При этом крайний правый недостающий столбец нового фрагмента необходимо записать в сегменте новым номером М (который в старой нумерации был первым). . Следующий сдвиг вправо на один столбец даст новую нумерацию сегментов памяти.
М-1.М. 1,2,3, .... М-2.
Причем новый столбец опять записывается в сегмент с новым номером М и т.д. По аналогии при сдвиге фрагмента влево на один столбец необходимо провести перенумерацию сегментов памяти с помощью циклического сдвига влево, а затем записать недостающий столбец (левый столбец нового фрагмента) в сегмент с новым номером 1. Аналогично может быть осуществлен сдвиг фрагмента вверх (или вниз) на одну строку. Для этого необходимо осуществить циклический сдвиг номеров строк в выбранном направлении на единицу, а затем записать новую информацию, в строку с номером 1 (или N).
В общем случае при сдвиге фрагмента на несколько строк или столбцов необходимо осуществить соответствующую циклическую перенумерацию строк или столбцов в памяти, а затем записать недостающую информацию в соответствии с новой нумерацией. Следует отметить, что в интересах упрощения реализации, иногда может оказаться полезным очередность выполнения перенумерации и собственно записи поменять местами.
Таким образом, циклическая перенумерация строк или столбцов в массиве памяти при каждом переходе к новому фрагменту изображения позволяет осуществить считывание из блока памяти поля зрения только новой части фрагмента при сдвиге по строке или по кадру.
Физически описанный выше процесс перенумерации записан ных в память элементов фрагментов изображения, может быть осуществлен двумя способами - либо соответствующей переиндексацией адресов сегментов памяти, либо путем физического сдвига самой информации в памяти.
Преимуществом описанного способа выборки элементов из блока памяти поля зрения является сокращение более чем на порядок количества обращений к ней. Если считываемые описанным выше способом последовательные фрагменты входного изображения подвергаются затем корреляционной обработке с эталоном, то при каждой перенумерации сегментов памяти фрагмента входного изображения, точно такая же перенумерация должна быть выполнена и в памяти эталона для того, чтобы при вычислении корреляционной функции сохранить взаимное соответствие элементов разложения текущего фрагмента и эталона. Это может быть произведено путем относительного циклического сдвига эталона относительно матрицы коррелятора, в которой
записано текущее изображение. Режим циклического перемещения эталонного изображения относительно матрицы осуществ- ляется путем соответствующего
переключения выходов и входов линейных
корреляторов с помощью мультиплексоров
14, управляемых сигналами, поступающими
. на пятый Р1 и шестой Р2 (управляющие)
входы, при этом сигнал тактовой синхрони0 зации (продвигающий импульс) поступает
на второй (управляющий) вход коррелятора.
Более подробно работа коррелятора в
данном режиме описана далее на с. 23.
Переходим к описанию работы базового
5 функционального элемента (БФЭ), схема которого изображена на фиг, 3,
На фиг. 3 приведена схема БФЭ, на которой приняты следующие условные обозначения:
0 Д1, Да - входы первой схемы И (координатные входы БФЭ); А - аналоговый вход; Hi, Нг, Нз - первый, второй и третий накопительные электроды соответственно;
5 Bi, Ба -бинарный вход и бинарный выход;
Ri, R2 входы схемы управления 30; . S - шина импульсов сдвига. Триггер 30 представляет робой один
0 разряд двоичного сдвигового регистра. Путем последовательного соединения таких элементов может быть образован сдвиговый регистр на необходимое число разрядов. Работа БФЭ осуществляется
5 следующим образом.
В ПЗС-ячейку 16 поступает заряд пропорциональный входному аналоговому сигналу из входной диффузионной области 21 (вход А) через передающий электрод записи
0 20, который управляется выходом первой схемы И 22. Запись заряда в ПЗС-ячейку осуществляется при одновременном наличии сигналов на обоих координатных входах Д1 и Да.
5 В ПЗС-ячейке 16 заряд может сдвигаться между тремя областя ми - центральной и двумя боковыми - в зависимости от соотношения потенциалов, приложенных к накопительным электродам 17, 18 и 19,
0 проходящим над соответствующими областями ПЗС-ячейки.
Три области хранения заряда в ПЗС- ячейке разделяются потенциальными барьерами, которые формируются с помощью
5 двух управляющих электродов 23 и 24, подключенных к выходам первой 25 и второй 26 схем ИЛИ.
В начале каждого цикла опроса оба передающих электрода 23 и 24 открыты (потенциальные барьеры отсутствуют) и заряд
собирается в центре ПЗС-ячейки под действием потенциала центрального электрода 17. Затем передающие электроды 23 и 24 закрываются, а потенциалы выходных накопительных электродов 18 и 19 изменяются таким образом, что под ними образуются потенциальные ямы. Затем (в момент опроса) открывается один или другой из передающих электродов 23 или 24 в зависимости от состояния триггера 30 (О или 1), и заряд ПЗС-ячейки перетекает в соответствующую потенциальную яму. При этом в результате сдвига заряда в ПЗС-ячейке на соответствующем выходном измерительном электроде 18 или 19 возникает наведен- ный сигнал, пропорциональный величине сдвигаемого заряда.
При этом сами заряды в ПЗС ячейках не удаляются и могут быть измерены повторно, при следующем цикле опроса.
При записи аналогового сигнала выбора очередной ПЗС-ячейки в матричном наборе осуществляется подачей импульсов на соответствующие координатные шины Д1 и Да. В результате на затвор записи 33 выбранной ПЗС-ячейки подается напряжение, открывающее его на время записи, и инжектируемые из входной области ввода заряда под шиной А заряды стекают в потенциаль-. ную яму под электродом Hi, на который для этого предварительно подается соответствующее напряжение. Затем на центральный электрод Н2 подается потенциал, образующий под ним более глубокую потенциальную яму, чем под электродом Hi. По команде передачи заряда под электродом Н2, поступающей на вход R2, схемы ИЛИ 25, 26 открывают передающие затворы П31 и П32 и зарядовый пакет перетекает под центральный электрод Н2. Для считывания сигнала ковариации кН, g электроды Hi и Нз предварительно заряжаются до потенциала, создающего под ними более глубокие потенциальные ямы, чем под электродом Н2. В соответствии с состоянием триггера 30 (в соответствующем разряде сдвигового регистра) в момент прихода импульса на вход управления RI на выходе одной 25 или другой 26 схем ИЛИ появляется сигнал, обеспечивающий перетекание зарядового пакета из под центрального электрода На в потенциальную яму под одним из электродов Нч или Нз.
При одновременном сдвиге зарядов во всех ячейках ПЗС-матрицы на этих электродах наводится суммарный сигнал, пропорциональный ковариации IC Yg - Для подготовки к следующему циклу опроса который произойдет после сдвига информации в сдвиговых регистрах бинарного сигнала, зарядовые пакеты в ПЗС-ячейкзх
снова переводятся под центральный электрод Н2 путем создания под ним потенциальной ямы и последующей подачи импульса управления на вход управления передаю- 5 щими затворами.
Считывание информации с электродов Hi и Нз может осуществляться любым стандартным способом, например, по схеме вы- . вода заряда с плавающими затворами 4. 0 После ввода заряда под центральный электрод Н2, но до открытия передающих затворов П31 и П32, области под электродами Hi и Нз заряжаются до напряжения питания -Епит, таким образом, чтобы 5 потенциальные ямы под электродами Hi и Нз были больше, чем под центральным электродом На (см. описание работы БФЭ, приведенное выше) и затем изолируются от указанного источника,
0 Полученный таким образом заряженный конденсатор, одной обкладкой которого является заряженная область под электродом Hi (Нз), а другой сам изолированный электрод HI (Нз), сохраняет свой 5 заряд до открытия одного из электродов П31 или П32. Заряд, находящийся под электродом Н2 вычитается из заряда конденсатора и это изменение заряда и
сигнала ковэриа- для простоты схема считывания не показана.
При последовательном соединении нескольких БФЭ образуется линейный набор, в котором накопительные электроды явля- 5 ются общими для всех ПЗС-ячеек, а триггеры 30 всех БФЭ образуют один сдвиговый . регистр бинарного сигнала. Образованный таким образом линейный коррелятор позволяет осуществлять корреляцию аналогового 0 сигнала, записанного в ПЗС-ячейках, с двоичной последовательностью, хранящейся в сдвиговом регистре. При каждом опросе линейного коррелятора на общих выходных электродах HI и Нз суммируются сигналы, 5 наведенные при сдвиге зарядов в ПЗС-ячейках различных БФЭ,
При этом на одном из выходных электродов суммируются сигналы в ПЗС-ячейках, соответствующих нулям в двоичной после- 0 довательности, а на другом - единицам. Осуществляя перед каждым опросом сдвиг двоичной последовательности в сдвиговом регистре, можно получить различные отсчеты корреляционной функции. Линейный 5 коррелятор подобного типа впервые был описан в работе 5 (см. также 6).
Коррелятор 8 включает в себя ряд ли- нейных корреляторов описанного типа, объединенных в двумерный набор, как показано на фиг. 2.
регистрируется в качествеi 0 ции K s f. g. На рисунках дл
Ниже приводится описание работы коррелятора в режиме сканирования эталоном относительно текущего изображения.
На фиг. 4 приведена .функциональная схема той части коррелятора, которая выполняет функции записи, хранения и сдвига бинарного эталонного изображения (ЭЙ), для частного случая . Здесь элементы Мх1,..., Мх5 - мультиплексоры (31 по схеме фиг. 2), а сдвиговые регистры образованы путем последовательного соединения триггеров 30 (фиг. 3) базовых функциональных элементов 16 (фиг. 2).
В режиме записи ЭЙ в коррелятор на информационные входы 1i ... 1s подается параллельный двоичный код, который содержит информацию о выбранном столбце одного из разрядных срезов ЭЙ. В .этом случае управляющие потенциалы Pi и Р2 равны нулю, мультиплексоры Мх1, ..., Мх5 пропускают информацию со входов 1i ... 1s на входы Д сдвиговых регистров RG1, .,., RG5 и по сигналу S, поданному на .входы синхронизации регистров, информации о текущем столбце ЭЙ записывается в регистры RG1,..., RG5, а предыдущая информация сдвигается вправо на элемент (режим О, схематически проиллюстрирован на фиг. 5а). По окончании записи ЭЙ и фрагмента текущего изображения (ТИ) в коррелятор необходимо выполнить определенное количество сдвигов ЭЙ относительно ТИ, причем в зависимости от заданной траектории сканирования эти сдвиги должны выполняться влево, вправо, вниз, вверх. Сдвиг влево на один элемент (режим 1, фиг. 56) выполняется при подаче управляющих сигналов , и пачки сдвигающих импульсов по входу S (их число на единицу меньше, чем количество разрядов в сдвиговых регистрах).
В этом случае каждый из регистров RGi, ..., RG5 образует кольцевой сдвиговый регистр.
Сдвиг вправо на один элемент (режим 1, фиг, 56) также выполняется при , подачей только одного импульса на вход S, при этом информация в каждом столбце ЭЙ (кроме последнего) сдвигается вправо на один элемент, а информация последнего (М- того) столбца сдвигается в столбец с номером 1.
Сдвиг ЭЙ вниз на один элемент (режим 2, фиг. 5в) выполняется при подаче управляющих сигналов , на входы мультиплексоров и пачки сдвигающих импульсов на вход S (их число в этом случае равно количеству разрядов в сдвиговых регистрах). В этом режиме регистры RG1, ..., RG5 образуют единый сдвиговый регистр,
причем информация с выхода RG1 поступает на вход RG2 и т.д., а с выхода RG5 поступает на вход RG1.
Сдвиг ЭЙ вверх на один элемент (ре- жим 3, фиг. 5г) выполняется при подаче управляющих сигналов . на входы Мх1,..., Мх5 и пачки сдвигающих импульсов по входу S (их число равно количеству разрядов в каждом из регистров RG1 ... RG5). В данном режиме выход RG5 соединен с входом RG4 и т.д., а выход RG1 - с входом RG5. На фиг. 5д приведен вариант траекто- рии считывания информации из памяти ТИ для частного случая ТИ размером 5x5 эле- ментов, ЭЙ 3x3 элементов. В этом случае считывание выполняется за 33 синхротакта (11 циклов по 3 синхротакта, номера циклов обозначены на фиг, 5д).
На фиг. 6 представлен возможный вари- ант функциональной схемы блока управления выборкой элементов разложения (БУВЭР), предназначенного для выработки адресов элементов разложения БППЗ и БПЭ, кода режима (КР), кода микрокоманд (МК), координат эталона относительно текущего изображения.
На схеме введены следующие обозначения:. ..
сх.упр. - схема управления; ИНЦ-импульс начала цикла;
ГТИ - генератор тактовых импульсов; ПЗУ МК-ПЗУ микрокоманд; ИК МК - импульс конца микрокоманды; ИКР - импульс конца режима; ИКЦ - импульс конца цикла.
БУВЭР состоит из схемы выработки КР на элементах 33, 34, 36, 37, 43; схемы выработки кода МК - на элементах 39, 38, 40; схемы выработки адреса элемента разложе- ния блока памяти эталона - на элементах 39, 41,42, схеме совпадения 44; схемы выработки адреса элемента разложения БППЗ - на элементах 50-53, генераторе кода предуста- новки 49, дешифраторе МК 46, сумматорах 54 и 55; схемы выработки координат эталона относительно текущего изображения - на элементах 47, 48, коммутаторе 45.
Работа БУВЭР осуществляется в трех режимах.
Всё три режима вместе составляют один цикл работы всего.устройства. Длительность цикла не превышает нескольких милисекунд.
Первые два из указанных режимов выполняются в каждом кадре. В последнем режиме запись эталона в БПЭ.может производиться либо из БППЗ (во время прицеливания), либо из внешнего устройства (при коррекции эталона).
Третий режим осуществляется только при наличии команды необходимости смены эталона поступающей извне на схему управления (65) коммутатором 31, который переключается в зависимости от кода режима на выходе счетчика 37 (Состояния счетчика: 00; 01; 10 - соответствуют 1-му, 2-му и 3-му режимам).
Цикл оканчивается с приходом импульса конца цикла (ИКЦ) с элемента 43 на вход R триггера 33 по окончании последнего, третьего, режима обновления эталона, либо по.окончании второго режима - вычисления корреляционной функции. В этом .случае ИКЦ вырабатывается из импульса, поступающего со схемы управления 65. Каждый режим работы устройства состоит из выполнения ряда МК, последовательность которых хранится в ПЗУ МК, на выходе которого генерируется код текущей МК. Длительность всех микрокоманд одинакова и определяется работой схемы совпадения 44 и счетчика 42, который сбрасывается от схемы совпадения через элемент ИДИ 39 импульсом конца МК. Код режима и код МК расшифровываются дешифратором МК 46, который управляет работой остальных частей схемы для выработки адресов элементов разложения БППЗ и координат для БОК. . Текущий адрес элемента разложения формируется из:
- базового адреса координаты положения эталона на текущем изображении, который представляет собой адрес элемента текущего изображения относительно верхнего левого угла, соответствующего верхнему левому элементу при определении его положения относительно текущего изображения;
- относительного смещения адреса элемента разложения относительно базового адреса;
- добавки на N элементов, где N соответствует числу элементов по одной из сторон эталона (строке или столбцу).
Все эти три составляющих подаются на сумматоры вертикальной и горизонтальной адресации (54 и 55) соответственно со следующих элементов: базовый адрес - со счетчиков 47 и 48; относительное смещение - с элементов 50 и 51; добавка - с элементов 52 и 53.
В первом режиме работы выполняется микрокоманда записи в коррелятор столбца
эталона и столбца текущего изображения такой же длины, поэтому код развертки МК, являющийся относительным смещением, поступает на сумматор вертикальной адре5 сации 54. Импульс конца МК через коммутатор 45 поступает на вход +1 счетчика 48, увеличивая тем самым состояние его на единицу, что эквивалентно адресации к следующему столбцу считываемого фрагмента.
0 Количество МК в этом режиме равно количеству столбцов в эталонном изображении.
Во втором режиме происходит вычисление отсчетов корреляционной функции. Это
5 реализуется с использованием трех микро. команд - сдвиг вправо, сдвиг влево и сдвиг вниз, отличающихся тем, что в них соответственно происходит считывание сегмента текущего изображения из N элемен0 трв справа, слева или снизу от фрагмента текущего изображения, находящегося в КМ. Путем чередования этих МК осуществляется сканирование всех фрагментов текущего изображения относительно эталона. Каждо5 му фрагменту соответствует один отсчет корреляционной функции. В этом режиме при сдвиге вправо добавка поступает только на сумматор горизонтальной адресации 55, при сдвиге вниз - только на сумматор
0 вертикальной адресации 54, а при сдвиге влево не поступает ни на один из сумматоров. Код развертки поступает на сумматор вертикальной адресации 54 при сдвиге влево и вправо и на сумматор горизонтальной
5 адресации 55 при сдвиге вниз. Импульс конца МК в конце каждой МК увеличивает состояние счетчика 48 при сдвиге вправо, счетчика 47 при сдвиге вниз и уменьшает состояние счетчика 48 на единицу при сдви0 те влево. Количество МК во втором режиме равно количеству отсчетов корреляционной функции,
В третьем режиме обновления эталона
5 отдельной микрокомандой является обновление столбца эталона. Третий режим анл- .логичен первому за исключением того, что в нем возможна предустановка счетчика 47 и 48 по параллельному входу для перезапи0 си в качестве эталона указанного фрагмента текущего изображения из БППЗ. На фиг. 7 приведен один из возможных вариантов реализации функциональной схемы блока управления корреляторами (БУК), который
5 предназначен для выработки управляющих сигналов необходимых для работы коррелятора S;Pi, PZ, Ri, Ra; координатных сигналов X и Y для выбора БФЭ; а также сигналов управления, поступающих на шины Ж, Нз и Нз БФЭ..
В состав БУК входит ПЗУ 56, элементы И 58-62 и кольцевые сдвиговые адресные регистры РАВ и РАГ, (63 и 64). Единичное состояние на выходе одного из разрядов каждого регистра указывает столбец и строку БФЭ, выбранного для записи очередного значения элемента текущего изображения. Состояние выходов обоих регистров может быть циклически сдвинуто как вправо так и влево по тактовому импульсу на входе С регистров путем подачи соответствующего разрешающего сигнала на входы R либо L. Временная последовательность выработки импульсов Рч, Рг, Ri, R2, S, координатных сигналов X и Y определяется логикой работы коррелятора в каждой микрокоманде. Код МК совместно с кодом развертки МК поступает на дешифратор МК, выполненный на ПЗУ 56, с выходом которого соответствующие управляющие сигналы поступают на КМ и РАВ, РАГ, либо стробируют тактовые импульсы на элементах 58-62.
Управляющие потенциалы на шины Hi, N2 и Нз, необходимые для работы каждого БФЭ коррелятора, вырабатываются с приходом каждого тактового импульса в блоке формирования импульсов записи - считывания (БФИЗС) 57. Форма и временное положение этих импульсов определяется работой БФЭ в соответствии с циклограммой, описанной выше.
В описанном устройстве существенное (в десятки и сотни раз) повышение быстродействия достигается за счет практически полного распараллеливания выполнения операций корреляции на уровне их физической реализации.
Формула изобретения 1. Устройство для определения координат объекта, содержащее блок определения координат, выход которого подключен к выходу и блоку управления выборкой элементов разложения, первый, второй, третий и четвертый выходы которого соединены соответственно с входами блока памяти этэло- йа, блока определения координат, коммутатора и блока памяти поля зрения, выход которого соединен с вторым входом коммутатора, первый выход которого подключен к второму входу блока памяти эталона, отличающееся тем, что, с целью уменьшения времени и повышения точности определения координат, введены арифметический блок, выход которого соединен с вторым входом блока определения координат п сдвиговых регистров, п основных и один дополнительный коррелятор сумматор, блок весового суммирования, блок возведения в квадрат, вход которого соединен с вторым выходом коммутатора, а его выход
- с аналоговым входом дополнительного коррелятора, и блок управления коррелятора, вход которого подключен к пятому выходу блока управления выборкой элементов
разложения, его первый выход - к управляющим входам корреляторов, а второй и третий выходами соединены с входами вертикального и горизонтального адресных регистров, подключенных поразрядно соот0 ветственно к строчным и столбцовым координатным входам всех корреляторов, каждый из которых, за исключением дополнительного коррелятора, аналоговым входом соединен с вторым выходом
5 коммутатора, а первым выходом - с соответствующим входом блока весового суммирования, выход которого подключен к первому входу арифметического блока, у которого второй и третий входы соединены
0 соответственно с выходами дополнительного коррелятора и сумматора, входы которого соединены с первым и вторым выходами соответствующего коррелятора, у каждого из которых бинарные входы соединены с
5 поразрядными выходами одного из сдвиго- вых регистров, вход которого подключен к выходу блока памяти эталона в соответствующем цифровом разряде.
5 по столбцам, образуют N х N координатных, входов коррелятора, причем первый аналоговый, второй, третий и четвертый управляющие входы коррелятора, а также его первый и второй выходы образованы парал0 лельным соединением соответствующих входов и выходов всех БФЭ, входящих в коррелятор, четвертые выходы БФЭ первого столбца подключены к пятым входам БФЭ второго столбца и далее до БФЭ по5 следнего N-ro столбца, и М-мультиплексо- ров, каждый из которых выходом соединен с пятым входом соответствующего БФЭ первого столбца матрицы, при этом N бинарных входов коррелятора образованы
0 первыми входами N мультиплексоров, четвертый выход каждого БФЭ в последнем М-М-м столбце матрицы подключен к второму входу мультиплексора в той же строке, к третьему входу мультиплексора в предыдуГ щей строке и к четвертому входу мультиплексора в поспедующей строке, а пятый и шестой входы коррелятора образованы путем пярлллельного соединения, соспветст- ппнно пя тых л шестых пходоп всех пходящих п Koppe- ii ji г.ул,шплекооосп.
11Щ
0
выходами первой и второй схем ИЛИ, входящими вместе с второй и третьей схемами И в состав ячейки управления, причем первые входы второй и третьей схем И соединены соответственно с прямым и инверсным выходами триггера, первый вход которого является одновременно вторым управляю- щим входом БФЭ, а попарно соединенные вторые входы второй и третьей схемы И и первые входы схем ИЛИ образуют соответственно третий и четвертый управляющие входы БФЭ, при этом второй информационный вход триггера является одновременно пятым входом БФЭ, прямой выход триггера является одновременно четвертым выходом БФЭ, а вторые входы первой и второй схем ИЛИ соединены с выходами второй и третьей схем И соответственно.
$
sv
Sv
s
s4
| Устройство для определения положения объекта на изображении | 1987 |
|
SU1427396A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
