Изобретение относится к области приборостроения и может быть использовано в приборах, предназначенных для измерения кажущегося ускорения центра масс объектов.
Целью изобретения является повышение точности прибора.
Чувствительный элемент акселерометра изображен на фиг. 1. Маятник 1 подвешен на двух упругих элементах 2 в базовом кольце 3. На маятнике 1 расположены обкладки 4 и 5 емкостного датчика угла и катушки 6 и 7 магнитоэлектрического датчика силы. В состав магнитной системы входят два магнитопровода 8 и 9, выполняющие одновременно функцию неподвижных обкладок датчика угла, два постоянных магнита 10 и 11, полюсные наконечники 12 и 13. На магнитопроводах магнитной системы нанесены по три пластика 14 для создания зазора между маятником 1 и неподвижными обкладками. Пакет, состоящий из центральной пластины и неподвижных обкладок 8 и 9, установлен в кольцо 15 и зажат кольцом 16, установленным на клей.
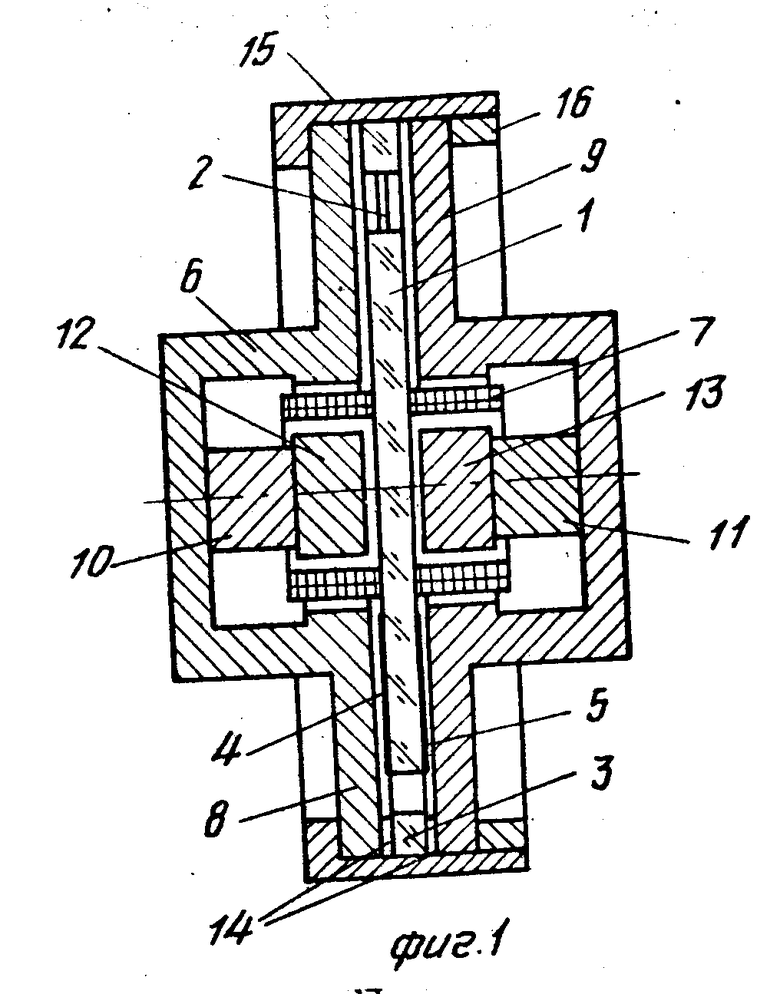
На фиг. 2 изображена центральная пластина акселерометра.
Пластина выполнена из единого куска кварца и состоит из маятника 1, подвешенного на двух упругих элементах 2 в базовом кольце 3. На торцовых поверхностях маятника 1 нанесены подвижные обкладки 4, 5 (обкладка 5 показана на фиг. 1) емкостного датчика угла и токоведущие дорожки 17 и 18, проходящие через упругие элементы. Упругие элементы так развернуты один относительно другого, что ось подвеса совпадает с одной из диагоналей каждого из двух упругих элементов, а токоведущие дорожки расположены на части упругих элементов, которая расположена между осью подвеса и жестко закрепленным базовым кольцом. Покажем, что предложенная оригинальная конструкция подвеса полностью исключает описанную выше составляющую погрешность акселерометра от тяжения подвеса маятника, при этом указанный положительный эффект совершенно не зависит от параметров, симметрии и точности изготовления токоведущих дорожек, что значительно упрощает технологию нанесения на упругие элементы.
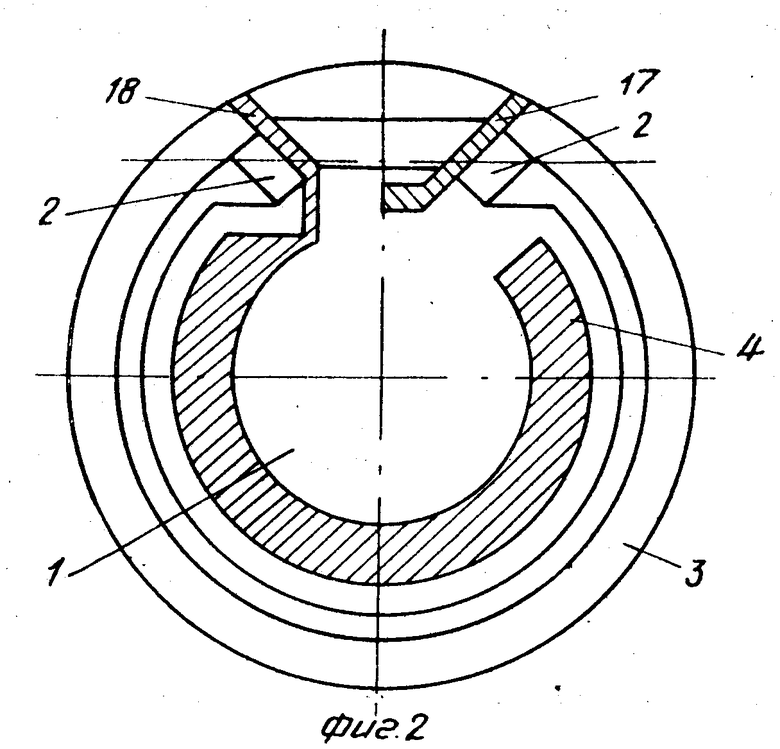
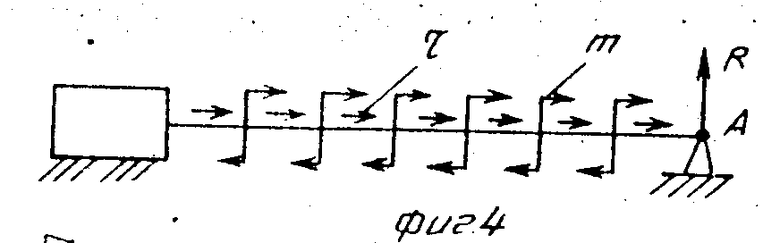
На фиг. 3 и 4 представлены расчетные схемы определения величины угла поворота сечения в т. А упругого элемента (и соответственно маятника) из-за тяжения в токоведущих дорожках в прототипе и заявляемой конструкции.
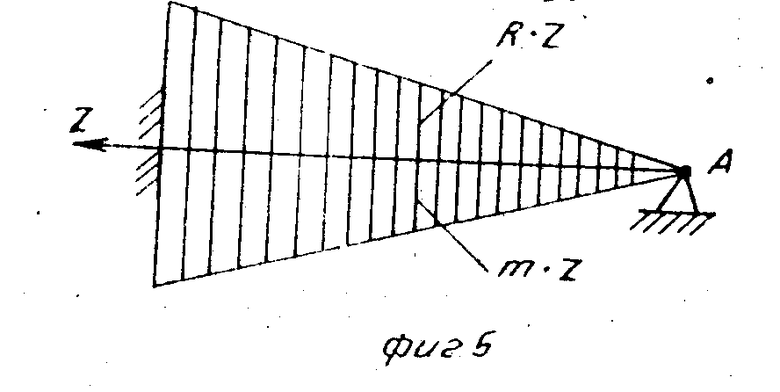
На фиг. 5 представлены эпюры изгибающих моментов, где R •Z - изгибающие моменты, возникающие в сечении упругих перемычек с координатой Z из-за силы реакции R на конце упругого элемента (в т. А), m•Z момент тяжения токоведущих дорожек в том же сечении из-за касательных напряжений τ
Из условия неподвижности т. А
следует, что m -R, т.е. эпюры моментов и внутренних силовых факторов симметричны, но противоположны по знаку. Это значит, что угол поворота любого сечения упругого элемента (в частности, в т. А на фиг. 4) равен нулю. Следовательно, нет поворота маятника и отсутствует температурный коэффициент тяжения со стороны токоведущих дорожек несмотря на то, что зависимость m=f(Δt) существует. Из приведенного расчетно-теоретического анализа следует, что полностью исключается температурное тяжение подвеса, причем указанный положительный эффект достигается независимо от погрешностей изготовления элементов, т. е. не требуется обеспечение идеальной симметрии и высокой точности изготовления элементов, что позволяет повысить технологичность и уменьшить стоимость прибора.
Таким образом, простыми средствами только за счет оригинального расположения упругих элементов подвеса и токоведущих дорожек по отношению к упругому элементу удается повысить точность прибора, сохранив его технологичность и стоимость на прежнем уровне по сравнению с аналогом и улучшить эти показатели по сравнению с прототипом.
Данный подвес имеет несколько большую жесткость, чем традиционный с теми же параметрам. Ниже показано, что увеличение жесткости незначительно. Угловая жесткость подвеса из двух элементов традиционной конструкции вычисляется по известной формуле для консольной балки, нагруженной моментом
где Е модуль упругости материала подвеса; момент инерции сечения балки;
момент инерции сечения балки;
b ширина балки;
l длина балки;
h толщина балки.
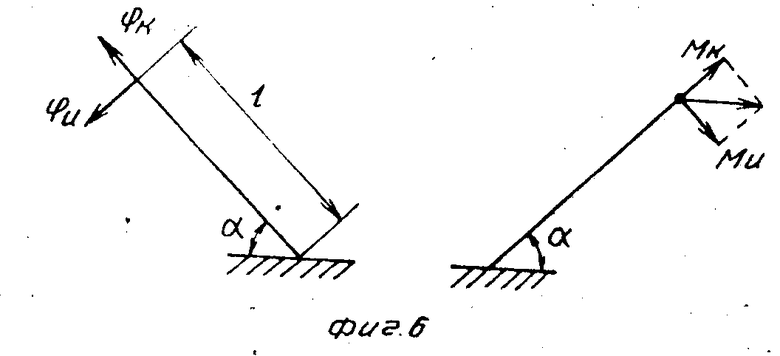
Расчетная схема определения угловой жесткости подвеса предлагаемой конструкции показана на фиг. 6, где Φи, Φк - углы изгиба и кручения, Ми, Mк изгибный и крутящий моменты.
Податливость каждого упругого элемента складывается из податливости на изгиб и податливости на кручение:
где С угловая жесткость подвеса из двух упругих элементов
момент инерции сечения балки на кручение,
μ- коэффициент Пуассона;
G модуль сдвига кварца.
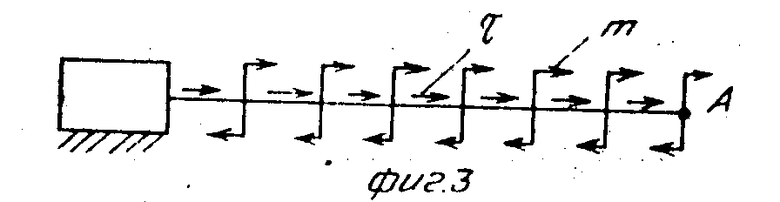
Подстановка (3) и (4) в (2) дает окончательное выражение для угловой жесткости предлагаемого подвеса:
Поделив (5) на (1), получим, что увеличение жесткости подвеса в заявляемой конструкции равно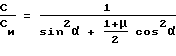
Например, при α= 45o и μ= 0,18 (для плавленого кварца) получим  т. е. жесткость увеличивается на 26% Это обстоятельство не является критичным, так как небольшое увеличение жесткости может быть скомпенсировано за счет уменьшения толщины упругих элементов. Так, например, в рассматриваемом случае для сохранения жесткости достаточно уменьшить толщину упругих элементов на 8% (вместо толщины 20 мкм подвес будет иметь толщину 18 мкм).
т. е. жесткость увеличивается на 26% Это обстоятельство не является критичным, так как небольшое увеличение жесткости может быть скомпенсировано за счет уменьшения толщины упругих элементов. Так, например, в рассматриваемом случае для сохранения жесткости достаточно уменьшить толщину упругих элементов на 8% (вместо толщины 20 мкм подвес будет иметь толщину 18 мкм).
Прибор работает следующим образом.
При движении объекта с ускорением W в направлении оси чувствительности на маятник 1 действует инерционная сила mW. Благодаря обратной связи инерционная сила будет парирована датчиком силы. При этом k•I=mW, где k крутизна датчика силы, m масса маятника.
При изменении температуры не будет изменяться величина вредных моментов из-за токоведущих дорожек и, как следствие, не будет появляться составляющая ложного сигнала, зависящая от напряжения в токоведущих дорожках. Это достигнуто благодаря предлагаемой конструкции подвеса инерционной массы.
Использование изобретения полностью исключает температурное тяжение подвеса, что позволит уменьшить величину суммарного температурного дрейфа нулевого сигнала приблизительно на порядок.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСЕЛЕРОМЕТР | 1983 |
|
RU2046345C1 |
| АКСЕЛЕРОМЕТР | 1984 |
|
RU2120641C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 2012 |
|
RU2497133C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543708C1 |
| АКСЕЛЕРОМЕТР | 1985 |
|
RU2045761C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| АКСЕЛЕРОМЕТР | 1986 |
|
RU2085954C1 |
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2441246C1 |
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825139A1 |
| АКСЕЛЕРОМЕТР | 1986 |
|
SU1840348A1 |
Использование: в приборостроении, в частности в приборах инерциальной навигации. Сущность изобретения: акселерометр содержит маятник, подвешенный на двух упругих элементах в базовом кольце. На маятнике расположены обкладки емкостного датчика угла и катушки магнитоэлектрического датчика силы. В состав магнитной системы входят два магнитопровода, выполняющие одновременно функцию неподвижных обкладок датчиков угла, два постоянных магнита, полюсные наконечники. Пакет, состоящий из центральной пластины и неподвижных обкладок, установлен в кольцо и зажат кольцом, установленным на клей. Одна из диагоналей каждого из двух упругих элементов совпадает с осью подвеса инерционной массы - маятника. Токоведущие дорожки нанесены на поверхность упругих элементов. 6 ил.
Акселерометр, содержащий базовое кольцо центральной пластины, внутри которого на двух упругих элементах подвеса с токоведущими дорожками расположена инерционная масса, емкостный датчик угла и магнитоэлектрический датчик силы, отличающийся тем, что, с целью повышения точности, упругие элементы подвеса расположены так, чтобы одна из диагоналей каждого из двух упругих элементов совпадала с осью подвеса инерционной массы, причем токоведущие дорожки нанесены на поверхности упругих элементов, расположенной между базовым кольцом центральной пластины и осью подвеса инерционной массы.
| Патент США N 3702073, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПРЕВЕНТОР | 1996 |
|
RU2102579C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
