Изобретение относится к измерению параметров движения, в частности к измерителям линейных ускорений на акустических волнах.
Цель изобретения повышение точности измерений.
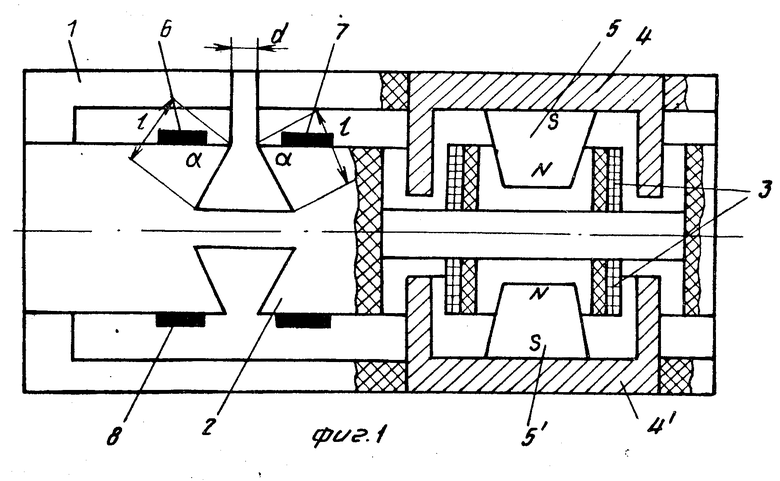
На фиг. 1 показана конструкция акселерометра; на фиг. 2 чувствительный элемент; на фиг. 3 структурная схема акселерометра.
Акселерометр (фиг. 1) имеет основание 1, в котором закреплен один конец консольного чувствительного элемента 2. На свободной части консоли ЧЭ 2 на каждой основной поверхности (грани, имеющей наибольшую площадь) образованы два связанных клинообразных волновода. Одна грань клина каждого волновода образована основной поверхностью ЧЭ 2, вторая грань клина каждого волновода образована плоскостью, расположенной под углом α относительно основной поверхности ЧЭ 2 и углубленной в теле ЧЭ 2. Ширина l грани клина, углубленной в тело ЧЭ 2, составляет не менее 100 длин акустической волны. Расстояние d между гребнями клиньев (вершинами треугольников клина), измеренное по образующей основной поверхности ЧЭ 2, составляет около четверти акустической волны.
Волноводы расположены перпендикулярно продольной оси ЧЭ и выполнены длиной L, совпадающей с шириной основной поверхности ЧЭ 2 и составляющей от 500 до 1500 длин акустической волны.
Две грани в теле ЧЭ 2, соединяющие углубленные в тело ЧЭ 2 грани клина, параллельные основным поверхностям ЧЭ 2, образуют перемычку, разделяющую неподвижную и свободную части консоли ЧЭ 2.
При образовании промежутков между частями основной поверхности ЧЭ в месте расположения гребней волноводов, выемок в теле ЧЭ 2, заключенных между гранями клиньев и перемычки, достигнута степень свободной части консоли ЧЭ относительно ос, параллельной основным поверхностям ЧЭ и перпендикулярной продольной оси ЧЭ.
Жесткость перемычки выбрана такой, чтобы при ускорении на нижнем пределе измерений происходила деформация перемычки, вызывающая изменение расстояния между гребнями волноводов ЧЭ 2 может быть выполнен из ниобата лития (LiNiO3). Волноводы и перемычка в этом случае получаются методом анизотронного травления, и угол α составляет около 60о.
Дифференциальный магнитоэлектрический датчик момента состоит из компенсационной обмотки 3, расположенной на ЧЭ 2, и размещенных на основании 1 двух статоров магнитной системы, один из которых имеет магнитопровод 4 и постоянный магнит 5, второй магнитопровод 4' и постоянный магнит 5'. Датчик момента располагается в области свободного конца консоли ЧЭ 2.
На волноводе на закрепленной части ЧЭ 2 на одной из его основных поверхностей расположен входной ВШП 6 первой линии задержки, на втором волноводе на этой же стороне ЧЭ 2 образован выходной ВШП 7 первой линии задержки (фиг. 1, 2). На волноводе на закрепленной части ЧЭ 2 на второй его основной поверхности расположен входной ВШП 8 второй линии задержки, на волноводе на консольной части этой же поверхности ЧЭ 2 выходной ВШП 9 второй линии задержки.
Расположение ВШП 6-9 таково, что направление акустического тракта линий задержки совпадают с продольной осью волноводов и перпендикулярно продольной оси ЧЭ 2.
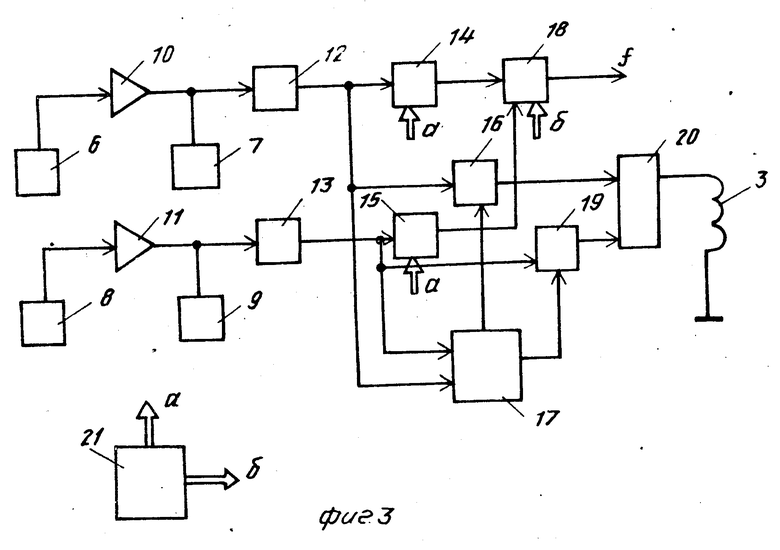
В схеме акселерометра также имеются усилители 10, 11; формирователи импульсов положительной 12 и отрицательной 13 полярности; счетчики-регистры 14, 15; первый коммутатор 16; логическая схема совпадения 17, блок вычитания кодов частот 18, второй коммутатор 19; импульсный усилитель 20; генератор тактовых импульсов 21.
В схеме акселерометра (фиг. 3) включением усилителя 10 между входным ВШП 6 и выходным ВШП 7 первой линии задержки образован первый генератор, к которому подключена цепочка из последовательно соединенных формирователей 12 импульсов положительной полярности и счетчика-регистра 14. При включении усилителя 11 между входным ВШП 8 и выходным ВШП 9 образован второй генератор, к которому подключена цепочка из последовательно соединенных формирователя 13 импульсов отрицательной полярности и счетчика-регистра 15. Выходы счетчиков-регистров 14, 15 подключены к блоку вычитания кодов частот 18. Выход формирователя 12 импульсов положительной полярности подключен также к входу коммутатора 16 и к одному из входов логической схемы совпадения 17. Выход формирователя 13 импульсов отрицательной полярности также подключен к входу второго коммутатора 19 и ко второму входу логической схемы совпадения 17. Выход логической схемы совпадения 17 подключен ко вторым входам коммутаторов 16, 19. Выходы коммутаторов 16, 19 подключены к входам импульсного усилителя 20, к выходу которого подключена компенсационная обмотка 3 датчика момента.
Формирователи импульсов 12, 13 отличаются различной полярностью напряжений питания, что обеспечивает формирование из синусоидальных сигналов генераторов импульсов различной полярности.
Импульсный усилитель 20 выполнен по симметричной схеме c двухполярным напряжением питания, что обеспечивает при подаче на его симметричный вход разнополярных импульсов получение разнополярных выходных сигналов.
Для управления работой устройства обработки сигналов акселерометра предусмотрен генератор тактовых импульсов 21.
Работа акселерометра осуществляется следующим образом.
При отсутствии ускорения, когда на свободный конец консоли ЧЭ 2 не действуют инерционные силы, отсутствует деформация перемычки между волноводами. В результате расстояние между волноводами на каждой основной поверхности ЧЭ 2 остается неизменным и равным четверти длины акустической волны. При этом обеспечивается прохождение сигналов между ВШП 6 и 7 в первой линии задержки, а также между ВШП 8 и 9 во второй линии задержки. В обеих генераторах происходит генерация электрических сигналов одинаковых частот. В формирователях импульсов 12, 13 из синусоидального сигнала формируется импульсный сигнал с частотой следования импульсов, равной частоте генератора. В формирователе импульсов 12 образуются импульсы положительной полярности, в формирователе импульсов 13 импульсы отрицательной полярности.
В счетчиках-регистрах 14, 15 преобразуются в код частоты импульсные частотные сигналы, поступающие с выходов формирователей импульсов 12, 13. В блоке вычитания кодов частот 18 производится вычитание кодов частот, поступающих на его входы со счетчиков-регистров 14, 15.
Так как при отсутствии ускорения частоты обоих генераторов равны, то с выхода блока вычитания кодов частот 18 поступает выходной сигнал акселерометра в виде кода, равного нулю.
На два входа логической схемы совпадения 17 поступают сигналы соответственно с формирователей импульсов 12, 13. Поэтому с выхода логической схемы совпадения 17 на входы коммутаторов 16, 19 поступает сигнал, запрещающий прохождение сигналов от формирователей импульсов 12, 13 через коммутаторы 16, 19 на вход усилителя 20. В результате с выхода усилителя 20 на компенсационную обмотку 3 датчика момента не подается напряжение, датчик момента не создает компенсационный момент, и ЧЭ 2 остается в положении равновесия.
При наличии измеряемого ускорения под действием инерционной силы свободный конец консоли ЧЭ 2 отклоняется от положения равновесия в результате деформации перемычки между закрепленной и свободной частями ЧЭ 2. При этом изменяется расстояние между гребнями волноводов на основных поверхностях ЧЭ 2. Пусть, например, направление ускорения таково, что ЧЭ смещается в такую сторону, что расстояние между гребнями волноводов, содержащих ВШП 6, 7, увеличивается, а расстояние между гребнями волноводов с ВШП 8, 9 уменьшается.
При увеличении расстояния между гребнями волноводов с ВШП 6, 7 до величины, большей четверти длины акустической волны, прекращается передача сигнала между ВШП 6, 7, первый генератор на линии задержки с ВШП 6, 7 прекратит генерацию частотного сигнала. При уменьшении расстояния между гребнями волноводов с ВШП 8, 9 расстояние между гребням волноводов станет меньше четверти длины акустической волны, что обеспечивает условия передачи сигнала между ВШП 8, 9. Поэтому второй генератор на линии задержки с ВШП 8, 9 будет продолжать выдавать частотный сигнал. В результате на входе блока вычитания кодов частот 18 будет существовать только сигнал со второго генератора, и блок вычитания кодов частот 18 выдает выходной сигнал акселерометра, величина которого будет определяться частотой второго генератора, а направление ускорения знаком разности в знаковом разряде блока вычитания кодов частот 18.
На входах логического устройства совпадения 17 будет только сигнал с формирователя импульсов 18, соединенного со вторым генератором. Поэтому с выхода логической схемы совпадения 17 на коммутаторы 16, 19 поступит сигнал разрешения на прохождение импульсов от формирователей импульсов 12, 13. Так как при этом будет только сигнал с формирователя импульсов 13 от второго генератора, то на вход импульсного усилителя 20 поступит только сигнал от коммутатора 19. В результате на выходе импульсного усилителя 20 появятся импульсы отрицательной полярности, полученные в результате преобразования частоты второго генератора в формирователе импульсов отрицательной полярности 13, прохождения его сигнала через коммутатор 19 на вход усилителя 20. Полярности сигналов акселерометра выбраны такими, что при прохождении импульсов отрицательной полярности с выхода импульсного усилителя 20 через компенсационную обмотку 3 датчика момента датчиком момента создается момент, компенсирующий инерционный момент и возвращающий ЧЭ 2 в исходное положение. В исходном положении ЧЭ 2 работают оба генератора, нет компенсирующего момента и сигнала с выхода акселерометра. Поэтому измеряемое ускорение а определяется выражением
a=k  ·fodt где k коэффициент преобразования акселерометра;
·fodt где k коэффициент преобразования акселерометра;
fo частота следования импульсов;
t время.
При ускорении противоположного направления, когда при деформации перемычки между неподвижной и свободной частями ЧЭ 2 увеличивается расстояние между гребнями волноводов с ВШП 8, 9 и уменьшается расстояние между гребнями волноводов с ВШП 6, 7, частотный выходной сигнал выдает только первый генератор на линии задержки с ВШП 6, 7. Поэтому на выходе блока вычитания кодов частот 18 получается выходной сигнал акселерометра, определяемый частотой первого генератора на линии задержки с ВШП 6, 7. При этом знак разности в знаковом разряде блока вычитания кодов частот 18 будет противоположным по сравнению с предыдущим случаем.
Ввиду наличия сигнала только с первого генератора на линии задержки с ВШП 6, 7 логическая схема совпадения 17 выдает сигнал в коммутаторы 16, 19 на разрешение прохождения через них сигналов с формирователей импульсов 12, 13. Так как сигнал поступает только от формирователя импульсов 12 положительной полярности, то он проходит через коммутатор 16 и поступает на вход импульсного усилителя 20. В результате с выхода усилителя 20 в компенсационную катушку 3 датчика момента поступают импульсы положительной полярности, чем и создается компенсирующий момент, возвращающий ЧЭ 2 в исходное положение.
Таким образом, акселерометр измеряет ускорение, знак которого определяется кодом знака знакового разряда блока вычитания кодов частот, а величина содержимым разрядов блока вычитания кодов частот.
От генератора тактовых импульсов 21 по шине "а" поступают сигналы на обнуление и запуск счетчиков-регистров 14, 15, по шине "б" подаются сигналы на разрешение операций в блоке вычитания кодов частот 18.
В заявленном акселерометре разрешающая способность увеличивается на несколько порядков, т.к. частота выходного сигнала акселерометра модулируется до 100% тогда как в существующих акселерометрах глубина модуляции не превышает 0,01-0,05%
Введение компенсации моментов означает применение отрицательной обратной связи в следящей системе акселерометра, что приводит к уменьшению нелинейности акселерометра вследствие спрямления его выходной характеристики.
Повышение разрешающей способности, уменьшение нелинейности повышают точность акселерометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825144A1 |
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825145A1 |
| АКСЕЛЕРОМЕТР | 1993 |
|
RU2039996C1 |
| АКСЕЛЕРОМЕТР | 1992 |
|
RU2018132C1 |
| Акселерометр | 1990 |
|
SU1755204A1 |
| Акселерометр | 1991 |
|
SU1765773A1 |
| АКСЕЛЕРОМЕТР | 1990 |
|
SU1825141A1 |
| АКСЕЛЕРОМЕТР | 1990 |
|
SU1825140A1 |
| АКСЕЛЕРОМЕТР НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 1992 |
|
RU2018131C1 |
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825146A1 |

Использование: приборостроение, акселерометры на основе преобразователей поверхностных акустических волн. Сущность изобретения: акселерометр содержит основание и консольный чувствительный элемент, на свободной части которого образованы два связанных клинообразных волновода, расположенных перпендикулярно продольной оси чувствительного элемента. Акселерометр содержит дифференциальный магнитоэлектрический датчик момента, который состоит из обмоток на чувствительном элементе и двух статоров, состоящих из магнитопровода и постоянного магнита и размещенных на основании. Акселерометр содержит также входные и выходные встречно-штыревые преобразователи, усилители, формирователи импульсов положительной и отрицательной полярности, счетчики-регистры, первый и второй коммутаторы, схему совпадения, блок вычитания кодов частот, импульсный усилитель. 3 ил.
АКСЕЛЕРОМЕТР, выполненный на основе преобразователей акустических волн, содержащий основание, чувствительный элемент, линии задержки с входными и выходными встречно-штыревыми преобразователями, генераторы, на линиях задержки, образованные включением усилителей, между входными и выходными встречно-штыревыми преобразователями, отличающийся тем, что, с целью повышения точности измерений, в него введены дифференциальный магнитоэлектрический датчик момента, компенсационная обмотка которого расположена на чувствительном элементе, а статоры магнитной системы на основании, формирователь импульсов положительной полярности, подключенный к одному из генераторов, формирователь импульсов отрицательной полярности, подключенный к второму генератору, два счетчика-регистра, подключенные к формирователям импульсов, логическую схему совпадения, блок вычитания кодов частот, два коммутатора, импульсный усилитель, при этом к блоку вычитания кодов частот подключены выходы счетчиков-регистров, выходы формирователей импульсов подключены к входам логической схемы совпадения, один из формирователей импульсов подсоединен к одному из коммутаторов, второй формирователь импульсов подсоединен к второму коммутатору, выход логической схемы совпадения подключен к обоим коммутаторам, выходы коммутаторов соединены с двумя входами импульсного усилителя, к выходу импульсного усилителя подключена компенсационная обмотка датчика момента, на каждой основной поверхности чувствительного элемента образованы два связанных клинообразных волновода длиной от 500 до 1500 длин акустической волны с направлением акустического тракта перпендикулярно продольной оси чувствительного элемента, расстояние между гребнями волноводов составляет около четверти длины акустической волны, ширина стороны клина волновода, углубленной в тело чувствительного элемента, составляет не менее 100 длин акустической волны, в месте расположения волноводов на чувствительном элементе образована перемычка между закрепленной и свободной частями чувствительного элемента, ось изгиба перемычки параллельна основным поверхностям чувствительного элемента и перпендикулярна продольной оси чувствительного элемента, а на каждой паре волноводов образована линия задержки, входной встречно-штыревой преобразователь которой расположен на одном волноводе, выходной встречно-штыревой преобразователь на втором волноводе.
| Патент США N 4676104, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
