Изобретение относится к системам, применяемым для управления скоростью и шагом множества вторичных элементов (вторичных обмоток), передвигающихся вдоль первичной обмотки линейного синхронного двигателя, расположенного вдоль удлиненной трассы, вытягивания пластмассовых пленок по двум осям, в частности изобретение относится к системе управлений скоростью и относительным шагом множества вторичных обмоток линейного синхронного двигателя, продвигаемых вдоль фиксированной обмотки, причем первичная обмотка разделена на множество независимо запитываемых и управляемых зон.
Цель изобретения - повышение качества полотна за счет обеспечения синхронного перемещения зажимов, управления и регулирования процессом вытягивания
Сл
На фиг. i показана блок-схема предлагаемого устройства; на фиг. 2 - первичная и две вторичные обмотки ЛСД, используемые о системе изобретения вместе с четырьмя характерными зональными приводами, а также выходные полярности первичной обмотки, вырабатываемые в ней для продвижения вторичных обмоток через четыре зоны; на фиг. 3 - трехфазный сигнал переменного тока, используемый для описания развития перемещающейся ЭМ и первичной обмотке ЛСД; на фиг. 4 - блок-схема взаимосвязи между независимо запитывае- мыми зонами первичной обмотки и вторичным обмотками при продвижении вторичных обмоток через участок первой постоянной скорости, участок ускорения и участок второй постоянной скорости; на фиг. 5 - блок-схема зонального контроллера; на фиг. 6 - логическая таблица истинности для логики выборки памяти с произвольным доступом зонального контроллера; на фиг, 7 - логическая таблица истинности для выходов с центрального контроллера на логику выбор:си памяги с произвольным доступом относительно логических состояний логики выборки памяти с произвольным доступом зонального контроллера; на фиг. 8 - подробная схема зонального приводного устройства ЛСД; на фиг. 9 - логическая таблица истинности для выходов и выходов логической схемы зонального приводного устройства ЛСД; на фиг. 10 - повторяющийся двухцикловый частотный профиль и соответствующий сигнал на выходе из зонального приводного устройства после обработки двоичных команд из зонального контроллера; на фиг. 11 - графическое изображение двоичной команды на выходах из зонального контроллера на зональное приводное устройство для одного цикла относительно фазового угла, характерного адреса памяги и частотной крутизны питающего сигнала, генерируемого в первичной обмотке; на фиг, 12 -- графическое изображение крутизны сло.кной частоты для ускорения вторичных обмоток от первой постоянной скорости к второй постоянной скорости; на фиг. 13-16- графическое изображение положения вторичных обмоток вдоль первичной обмотки по фазовому углу относительно времени для двух характерных условий устойчивого состояния и характерного условия переходного состояния; на бит. 17 - рама устройства одновременной двуосной растяжки, соответствующей изобретению; на фиг. 18 - сечение Л-А на фиг. 17,
Устройство имеет системный компьютер 100, центральную программируемую
схему базового тактирования Юб.централь- ный контроллер 108 и множество независимых зональных приводных средств. В показанной части устройства - системы независимые зональные приводные средства для запитывания первичных катушечных обмоток, представленных катушками 138, 142, 146 и 150, являются зональными приводными устройствами, такими как приводы 136,
140, 144 и 148, и зональными контроллерЗ- ми, такими как зональные контроллеры 128, 130,132 и 134, каждый из которых соединен с соответствующим, связанным с ним зональным приводом. В системе центральный
5 контроллер 108 соединен с каждым зональным контроллером, центральная программируемая схема базового тактирования 106 соединена с центральным контроллером 108 и обеспечивает подачу тактовых сигна0 лов на зональные контроллеры через центральный контроллер 108; системный компьютер 100 соединен с центральной программируемой схемой базового тактирования 106, центральным контроллером
5 Ю8 и зональными контроллерами 128, 130, 132 и 134 через шину 102 связи данных. Система с такой конфигурацией предназначена для работы во множестве устойчивых состояний и в переходном состоянии для
0 осуществления перехода между устойчивыми состояниями.
Также предполагается, что система изобретения может работать в одном устойчивом состоянии. Когда система имеет такую
5 конфигурацию, она включает все элементы описанной системы за исключением системного компьютера 100 и центрального контроллера 108. Центральная программируемая схема базового тактирования 106 со0 единена с каждым зональным контроллером и обеспечивает подачу тактовых сигналов на зональные контроллеры для управления их соответствующими выходами. Зональные контроллеры при таком
5 воплощении имеют только одну память, которая содержит команды для одного устойчивого состояния.
Системный компьютер 100 обеспечивает общее супервизорное управление систе0 Мой изобретения. Компьютер 100 соединен с шиной 102 связи данных и вырабатывает, помимо всего прочзго, управляющую информацию для инициализации изменений в работе устойчивого состояния системы.
5 Компьютер 100 также загружает информацию в три запоминающих устройства всех зональных контроллеров для ее хранения. Эта информация предназначена для создания трех различных структур питающих сиг- налоя.
Центральный контроллер 108 является логической схемой, используемой для управления состоянием, в котором работает система. Состояниями работы системы являются первое устойчивое состояние, ато- рое устойчивое состояние и переходное состояние для перехода из первого устойчивого состояния во второе. Выходные сигна- лы центрального контроллсфа 108 определяют, какая выбрана память зональ- ного контроллера для создания питающего сигнала с целью запитыванил первичной катушечной обмотки определенной зоны. Он также обеспечивает выдачу тактовых сигналов из центральной программируемой схе- мы базового тактирования 106 для осуществления обррщения к выбранной памяти с целью отправки содержащихся в ней двоичных команд из зонального контроллера на зональное приводное устройство. Центральный контроллер 108 осуществляет двустороннюю коммуникацию с шиной 102 связи данных как для отправки информации, так и для получения ее с компьютера 100.
Центральная программируемая схема базового тактирования 106 вырабатывает импульсный сигнал постоянной частоты для центрального контроллера 108, который в свою очередь обеспечивает базовым такти- рованием или подмножественным сигналом каждый зональный контроллер. Сигнал, вырабатываемый схемой базового тактирования 106, является обычным сигналом базового тактирования, используемым для синхронизации выхода зональных контроллеров. Выходная скорость импульсов центральной программируемой схемы базового тактирования 106 может настраиваться чэ различные требуемые величины посредст- вом команд, получаемых от системного компьютера, которые задаются оператором. Это позволяет увеличивать или уменьшать шкалу скорости вторичных обмоток без изменения отношения скоростей и относи- тельного шага между вторичными обмотками.
Зональные контроллеры 128, 130, 132 и 134 характеризуют все зональные контроллеры системы изобретения. Эти контролло- ры используются для хранения двоичных команд характеристик питающих сигналов с целью создания ЭМ волны для определенной зоны первичной обмотки, которая подсоединена через отдельное зональное приводное устройство.
Зональные приводные устройства 136, I40,144 и 148 оя вот л ют совместно с описанными зональными контролерами, к которым подсоединено ;;че приводное
устройстве. Каждой зональное приподное устройство полумае г трехфазный входной сигнал переменного токя от внешнего ис- тсмника, который затем выпрямляется и фильтруется для созданий источника электропитания постоянного тока. Питание по стопнного тока подается через пары силовых транзисторных переключателей, чоторые переключаются для выработки частотно регулируемого выходного сигнала переменного тока в первичной обмотке. Возьмем для примера зональное приводное устройство-136: оно получает цифровые входные сигналы от подключенного зонального контроллера 128. Цифровые входные сигналы подаются на вход вентильной логической схемы зонального приуодчого устройства 136, выходной сигнал которого вызывает переключение сипового транзисторного переключателя для выработки, например, выходного сигнала шестишагового типа с цепью эапитывэния катушек первичной обмотки для создание передвигающейся ЭМ волны. Зональные приводные устройство (привод 136) имеют известную конструкцию: приводные устройства модифицируются упомянутом вентильной логической схемой для п е р е к л ю ч е ки я переключателей на силовмх транзисторах и схемой управления напряжением.
Катушки 138, 142, 146 и 150 первичной обмотки представляют специфические намоточные катушки зон которые запитыва- ютгя отдельным зональным приводным средством, состоящим из зонального контроллера и зонального приводного устройства. Эги катушки злпитызэюгся гак, что в данной зоне выраОогыпае ся передвигающаяся магнит i-золна
На фиг. 2 первичная обмотка 152 и вторичные обмотки 160 и 1 70 типичны для ПСД с короткой вторичной обмотком. Первичная обмоткл 152 является видом поперечного сечения части удлиненной первичной обмотки, Из фиг. 2 показаны чегырз независимо зопитывасмые дискретные смежные зоны (поз. 184. Зона 1 является зоной постоянной скорости, ь то пре.мя как зоны 2-4 пре,г .г.т.к:. собой зоны ускорений в уча-, стке ускорения первично; обмотки 152. Первичная обмотка 152 имеет г.азы 154 для размещения в них витков &- 06 и 0С катушки. г лсжду соседними пазами 154 расположены пластинчат ь i- зубья 156 д игат; я пред- нззначонные для завершения тпг.сг.ы NM-ЬИТИОГО потока д/1 создания перемещающейся ЭМ. волны. Трасса пото.з ccj,voic обычным путем, типичным дл(1 ЛСД i гт-м-чтным для игюциалист о а а данго . ь- техники, V; гн.эгйму не треГг/ .т д:п. ч-j объяснзния В характерном примере витки катушки первичной обмотки имеют отношение по хорде 2/3.
В примере, поклзанном на фиг, 1, частота трехфазного питающего сигмаиа, вырзба- 1ываемого п первичной обмотке, постоянна в зоне 1 постоянной скорости, л также в зонах 2-4 ускорения. Однако полагают, что трехфазный питающий сигнал, используемый дпп питания катушки первичной обмот ки зонр ускорении, имеет частоту, которая меняется с течением ЭРСМРНЯ, обеспечивая частотную крутизну ппгзюшегэ сигналя для увеличения или уменьшения скорости вторичной обмотки, продвигаемой а такой оне ускорение, ксиоээя засит ронигифо зана с перемсипющоиср ЗМ полпоГт, пнрабаты- пасмоП в первичной обмотке питающим гиг папом.
Одной из особенностей CMC темы соглас- но псобоотешио япляетс то, ч го попа 1-4, 1 о эг-ис мо управляемся онгльлим
ПРИПОДП М ГреЦСТВОМ ВК;1ГОЧ Т10 ЦИ Ч 30
натьное приподное устройство и зональный коптро/1ЛГ). Кпжпое зональное- попрпд г 0
yCTpOfCSi O КООиДПЧНруС-ГСЯ С Н 1 ПГН/ ОИМП
упр ппяем;/ми зональным: усы йотпамч уинаьпснпя сосодык зоч, так чго ьмориччсл сбмотка иопьпь озет воздействие непрерывно1. .юрсмешпюч зигч П, полны по всей прогч спнос «чудлиненной периични/ обмптки 15 C -Ofiocrb и no;, ipHocfh ricpe,- мещаюшоиь Of, голнч мгновенно rouiaco- оываютс-i CTI;KP ис лду дв/мя независимо запн гыпс-яыг и он мн по про- мя передачи п/тсг i согласоогния частоты и фалы их питаклчи сч1 нале-. Это делается без приолечения схемы obpx.nou гичз. как это имеет мэстс п onrca uj - чрм 5р ; известного ypniitp техники
График поло кения относительно полярности ДЛЯ ШССТИ рТЗЛИЧЧЫХ СПЛЗГНиых с созданной ЭМ пок i tan Иг1 фиг. 2 (поз ). Пет кр лст згз/. ьид пчпо- К ту1пек и упье п рпич- ноиоПмотги Поз. 1Я4 об чзнсчси ппдсзрр у
Чубьсв И (мТРуШОГ, ПОГГ ЗЗЫЧ V nO i 1B2. 140торыи прелставлен с направлением попо- житильмого тока п уазанин -зтушках. Катушки которые ррсполохены j1 п Зг )-1Ь4, показаны, например, как А и А (черточка над определенной букчоу означай па- праолеиие положительного тока R кату1икс противоположно направлению то к а в катуцко, не имеющей черючш счо- им обозначением).
Вторичные отмогки, т а КИР .к 160 и 170 продвигаются по перпичной обмотке 1Ь2 пссродстпом перемеипющейся ЭГ/, полны, создаваемой ктушки Пррдпочтительно устанавливать вторичные обмотки на монорельсе для передвижение вдоль первичной обмотки Между первичной и вторичной обмотками существует обычно воздушный зазор, когда вторичные обмотки установлены на монорельсе. Вторичная обмотка 160 имеет обычные постоянные маг- читы 162 и 164, расположенные в нижней поверхности. Эти магниты обеспечивают обратные полярности у нижней поверхнй- сги вторичной обмотки, смежной с первичной обмоткой 152, но несколько удаленной от нее. Магнитные полюса 162 и 164 отделены расстоянием одного полюсного шага или Я, что согласовывает фиксированный полюсный шаг первичной обмотги Соседние вторичные обмотки, такие как 160 и 170, имеют противоположное расположение своих магнитов. Например, вторичная обмотка 160 имеет магнит 162, являющийся северным полюсом, за которым следует магнит 164, представляющий южный полюс, ото время как соседняя пторичная обмотка 170 имеет магнит 172, являющийся южным полюсом, за которым следует маг пит 174, представляющий северный полюс Соседние вторичные обмотки имеют обратные полюса, что позволяет осуществить размещение в одной зоне соседних вторичных обмоток, которые разделяют 1 Я между магнитными границами соседних вторичных обмоток Однако магниты можно расположить повторяющейся комбинацией в соседних вторичных обмотках, например, север/юг - север/юг Если магниты расположены таким образом, минимальное расстояние, разделяющее магнитные границы соседних вторичных обмоток, должно быть 2 Я .
При снероции перемещающейся ЭМ полны, если взять дпп примера моментЛ на фиг 3, ток в С-фазных катушках имеет максимальное положительное значение Поэтому в зоне 1 ток в С-фазных катушках 190 и 198 течет в направлении против часовой стрелки и по часовой стрелке в С- Ьазной ртушке 192 Это будет означать, что на обозначении под цифровой 182 по хорошо известному правилу правой руки северный полюс создается катушками 190 и 198, а южный полюс - катушкой 192 зоны 1. Как показано на поз 180, вдоль линии Т1, южный полюс ьад С-фазной катушкой 192 зоны 1 сцепляется с севепнп« полюсом магнита 162 вторичной обмотки 160 а северный полюс над С-фатной катушкой 198 зоны 1 сцепляется с южным полюсом магнита 164
Все зональные приг.оцныр устройства 136, 140, 144 и 148 для зон 1 л вчрабатыва ют питаюшие сигналы п к не мгновенно
согласовываются на стыках между зонами вдоль длины первичной обмотки 152, Например, о последней С-фазной катушке зоны 1 положительное течение тока в направлении против часовой стрелки гене- рирует северный полюс; в С-фазной катушке зоны 2 положительное течение тока в направлении по часовой стрелке генерирует южный полюс; в С-фазной катушке зоны 3 положительное течение тока в нэправле- нии против часовой стрелки генерирует северный полюс, а в С-фазной катушке зоны 4 положительное течение тока в направлении по часовой стрелке генерирует южный полюс. Это расположение С, С повторяется по всей длине первичной обмотки для С-фаз- ных катушек. Это также верно для А-фазных и В-фазных катушек. Таким образом, вдоль первичной обмотки 152 генерируются северные и южные полюса для сцепления с магнитами и продвижения вторичных обмоток 160 и 170. Кроме того, так как между центральными линиями ближайших полюсов соседних вторичных обмоток существует дистанция в 2 А , вторичную обмотку 170 можно ускорять независимо от вторичной обмотки 160. потому что каждая ускоряемая вторичная обмотка будет всегда находиться в отдельной зоне в любой заданный момент времени, подчиняясь, следовательно, инди- видуальной частотной крутизне питающего сигнала зоны или зон, через которые ее продвигают.
Возьмем теперь момент времени Т2: следующей катушкой пикового тока для со- здания перемещающейся ЭМ волны с целью продвижения вторичных катушек является В-фазная катушка. Как видно из фигуры 3 в момент времени Т2 ток в В-фазной катушке имеет максимальное отрицатель- ное значение. По существу, ток будет течь в направлении, противоположном направлению стрелки катушки 196. Отметим чередование полярностей для В-фазных катушек по линии Т2 для зон 1-4 а той же форме, как описано выше для С-фазиых катушек. При сдвиге от времени Т1 ко времени Т2 В-фазная катушка 196 меняет полюс с северного на южный. Это продвинет северный полюс магнита 162 вторичной обмотки 160 вправо, тем самым перемещая вторичную обмотку по первичной обмотке 152 в результате замыкания магнитных полюсов вторичной обмотки 160 на перемещающуюся ЭМ волну. Путем тактового действия вторичные об- мотки 160 и 170 продвигаются впрапо вдоль первичной обмотки вместе с перемещающейся ЭМ волной. Более того, хотя одну вторичную обмотку можно продвинуть через две зоны за одно , потому что
наименьшая зона может быть длиной 1 ) . в то время как вторичная обмотка имеет дпи- ну 2 А , никогда не бывает тякой ситуации, при которой в одной и той же зоне ускорения одновременно находится более одной вторичной обмотки.
На фиг, 4 представлена блок-схема части системы изобретения, демонстрирующая взаимосвязь между первичной и вторичной обмотками по мере продвижения последних вдоль первичной обмотки от участка ускорения и далее к участку второй постоянной скорости. Вторичные обмотки первоначально включаются в систему в фиксированные интервалы времени на первой постоянной скорости или около нее и в синхронности с ЗМ полной. На фиг, 4 показаны характернее вторичные обмотки 200. 202, 204, 206, 208,210, 212, 214, 216, 220, 222 и 224, про- дпчгземые по удлиненной первичной обмотке 152, Первичная обмотка 152 разделена на три участка, я именно участок первой постоянной скорости 300, участок ускорения (положительного) 302 и участок пторой постоянной скорости 304. Фиг. 4 представляет момент времени, показывающий относительное положение каждой вторичной обмотки относительно других, находящихся в настоящее время в системе. Участок морной постоянной скорости 300 предназначен для продвижения рторичных обмоток со скоростью, меньшей чем скорость на участке второй постоянной скорости 304. Однако надо понимать, «то на участке первой постоянной скорости 300 можно продвигать вторичные обмотки со скоростью, превосходящей скорость на участке второй постоянной СКОРОСТИ 304, о этом слу- чэе участок ускорения 302 будет участком отрицательного ускорения, а размер зон будет уменьшаться по длине слевз направо, а не увеличиваться.
Каждый участок далее разделен на одну или более зон, которые соединены с индивидуальными зональными приводными средствами (фиг. 1), из котооых показаны только зональные приводные устройства. Участок первой постоянной скорости 300- р.к:лючает только одну зону, зону 1 (308), с котооои соединено приводное устройство 136; участок ускорения включает шесть зон, здесь приходное устройство 140 соединено с зоной 2 (310), приводное устройство 144 - с зоной 3 (3 2), приводное устпойство 148 - с зоной 4 (314). приводное устройство 226 - с зоной 5 (о 16), приводное устройство 228 - с зонои 6 (313) и приходное устройство 230 - с зон: эй 7 (320), о участок етосой посто нинои скорости 304 включает три зоны, где приводное устройство 232 соединено С зо- мои 8 (332), приводное устройство 234 - с зоной 9 (324) и приводной устройство 236 с зоной 10(326).
Участок первой постоянной скорости 300, а котором вторичные обмотки 200, 02, 204, 206 и 20В расставлены близко, представляет СОЙОУ одну зону 1 (308). В горичные обмотки продвигаются от участка первой постоянной СКОРОСТИ 300 к участку положительного ускорения 302, На этом участке скорости вторичных обмоток, тэки как 2 SO, 212, 2.14 и 216 увеличиваются независимо по мере их движения вправо. Вторичные об- мотки за том передай а юте я от участка ускорения 302 к участку втором постоянной скорости 301, на котором.скорость вторичных обмоток, таких как 220, 222 и 224, постоянна.
График 350 представляет собой график скорости вторичных обмоток в зависимости от полохаьп здоль первичной обмсгт: На график.1 350 и 306 в начале частотного подъ ема веется сегмент 2 А . Он необходим для обсспечоч /ы того, чтобы вторичная обмотка, ксюрал имеет длину Ј Я , полпоег-ю пошла л первую зону ускорения до TOI о а к будет увеличиваться скорость. На фи), л ио- система при работе и устойчивом состоянии, Вторичные обмотки пходяг п систему на участки персон постоянной скорости 300 с небольшими интервалами. Как показано via (Jn.r. 4, эют ишернзп р шсм 3 А и включает длину вторичных обмоток 2 А и промежуток 1 X между магнитными границами соседних вторичных обмоток. Однако вторичные обмотки могут входить с систему через неодинаковые промежу Ш при снятии ОДНМУ в горичмых обмоток и оставлении других а том же самом положении ожоси- тельно ОМ голии, т.е. вторичнно обмотки 202 и 204 very т быть сняты, сстаолтя неодинаковый промежуток, но аторичнэч оПмст-са 200 до/шна нести ту же спою позиционную взаимосвязь с созданной ЭМ РОЛНОЙ.
Участок ускорения 302 имеет зоны увеличенной длины, что особенно заметно при сравнении длины зоны 2 (310) с длиной зоны 7 (320). Увеличенная длина зон на участке ускорения 302 облегчает использование экономного метода осуществления разделения вторичных обмоток путем увеличения их скорости о отдельных, зонах ча основе нахождения п определенной зоне в любой момент времени только одной вторичной обмотки, а также пересечение и оставления каждой вторичной ob могки по крайней мере одмти SOHJ, зо исключением зоны 1. в
течение фиксированного периода-времени Однако нет необходимости, чтобы тоны имели увеличенные длины Каждая зона вдоль всей длины первичной обмотки может
иметь одну и ту же длину, например 1 . Если это так, просто нужно добавить дополнительные зональные приводные уст с/ойства и соответствующие зональные контроллеры для размещения увеличенного количества
0 зон.
Фиг. 5 представляет собой подробную блок-схему характерного зонального контроллера приводного средства, Зональный контроллер, показанный на фиг. 5. имеет
5 цифровое обозначение 128, которым указан зональный контроллер для зоны 1 на фиг. 1. Зональный контроллер 128 имеет логику выборки 400 памяти с произвольным доступом и три пары перезаписываемого адресного
0
счетчика памяти с произвольным доступом
(РАМ), а именно пару устойчивого состояния RAM X, включающую адресный счетчик 402 и память с произвольным доступом 404; пару переходною состояния RAMZ, в ключ а ю5 щую адресный счетчик 406 и память с произвольным доступом 408; и пару устойчивого состояния RAMZ, включающую адресный счетчик 410 и память с произвольным доступом 412. Также в зо0 нальный контроллер 128 включаются линейное приводное устройство 416 и местная программируемая схема базового тактиро- вания 414. Переходная пара RAM Y анало- i ична парам устойчивого состояния RAM X и
5 7 за исключением того, что она имеет дополнительно подключенную к ней память.
Как сказано выше, зональному контроллеру необходимо иметь только одну память, если система должна работать только в од0 ном устойчивом состоянии. В таком воплощении зональный контроллер будет содержать только одну пару перезаписываемого адресного счетчика/памяти с произвольным доступом. Так как это воплощение
5 должно работать только в одном устойчивом состоянии, логика выборки памяти с произвольным доступом 400 также исключается, в то время как остальная-часть зонального контроллера остается такой же, как показа0 но на фиг. 5. Память каждого зонального контроллера содержит двоичные команды для частотной и фазовой характеристик отдельного сигнала.
В предпочтительном варианте осущест5 олеиия каждое из трех запоминающих устройств с произвольным доступом хранит в себе двоичные команды для частотной и фа зовой характеристик отдельного сигнала Например, память с прои июлкным доступом 404 будет мметь TM-V/VJ д| ч ; -, ЮРОЙ
и частотной характеристик сигнала устойчивого состояния, память с произвольным доступом 408 - дпоичные команды для фазовой и частотной характеристик сигнала переходного состояния, а память с произвольным доступом 412 -двоичные команды характеристик фазы и частоты второго сигнала устойчивого состояния, отличных от тех, что хранятся в памяти 404. Двоичные команды, хранимые в каждом типе памяти RAM X, РАМ Y и РАМ Z во всех зонэпьпых контроллерах, имеют одно и то же фиксированное количество адресов. Двоичные команды для этих сигналов и их применение будут более подробно описаны ниже, но на данном этапе необходимо уяснить, что двоичные команды для сигнала переходного со- сюяния, хранимые в памяти с произвольным доступом 408, используются для перехода от двоичных команд для сигнала устойчивого состояния, хранимых в памяти с произвольным доступом 404, к двоичным командам для сигнала устойчивого состояния, хранимым в памяти с произвольным доступом 412.
Содержимое выбранной памяти с произвольным доступом выводится с логики выборки 400 памяти с произвольным доступом и подается на линейное произвольное устройство 416. Память с произвольным доступом, выбранная логикой выборки RAM 400, будет соответствовать сигналам, полученным с центрального контроллера 108 по линиям 116, 118 и 120. Обычно выборка типа памяти с произвольным доступом осуществляется во всех зональных контроллерах системы. Например, для первого рабочего условия устойчивого состояния центральный контроллер 108 подает входные сигналы на все логические схемы аы- борки памяти с произвольным доступом зональных контроллеров с целью выборки РАМ X, 404. Это необходимо, потому что питающие сигналы для соседних зон согласовываются на стыке, когда происходит выборка запоминающих устройств с произвольным доступом определенного типа.
Во время работы базовые тактовые импульсы, а именно сигнал 144 базовой схемы тактирования X, сигнал 112 базовой схемы тактирования Y и сигнал 110 базовой схемы тактирования Z подаются с центрального контроллера 108 на соответствующие адресные счетчики пар перезаписываемого адресного счетчика/памяти с произвольным доступом, когда зтз память выбирается. Рассмотрим для примера пару перезаписываемого адресного счетчика/памяти с произвольным доступом, состоящую из гчор ика 402 и РАМ 404: здесь сигнал валовой схемы рооамия X етробирует адресный счетчик 402. Сигнал 114 базовой схемы тактировл- 5 мил X вызыоает то, то RAM 404 на его основе выдает выходной сигнал, Адресный счотчик 402 последовательно проходит через все адреса памяти с произвольным доступом RAM 404 v, гзозобновл лет
0 последовательность при достижении памятью RAM 404 последнего предварительно запрограммированного адреса.
Центральный контроллер 108 управляет тем, какие сигналы со всех логи5 ческмх схем Е ыборки памяти с произвольным доступом, уппачлкет выбором одинаковых типоя памлти с произвольным доступом, будь то РАМ X. RAM Y или RAM Z. для всех зональных контроллеров и запуска0 от их все в унисон. Так как псе запоминающие устройств с произвольным доступом RAM X ц--.:е;от одинаковое количество ко- р. янд и всо стробируются общим тактовым сиг-налом - сигналом 114 базовой
5 схемы такгироначия X. то они все последовательно проходят через свои адреса, достигают своих конечных адpecon и запускаются снова одновременно. Потому что эго тзк, центральному контроллеру 108
0 необходимо только контролировать линии переполнения 122,124 и 120 одного зонального контролперо на переполнение адресных счетчиков Z, Y и X соответственно, чтобы определить момент достижения кон5 ца памяти каждого типа RAM, если нужно выбрать RAM нового типа. Выбор новой памяти с произвольные доступом может произойти только поспь достижении конечного адрес памяти с произвольным доступом, к
0 которой происходит обращение в дачное время. При переходе от одной памяти с произвольным доступом к другой не должно быть прерывания в выдаче команд зональным приводным устройством. Таким обра5 зом, вслед за последними выданными данными из используемой в данное время памяти с произвольным доступом будут вы- дчваться следуюшие данные, являющиеся первыми выдаваемыми данными из вновь «
0 выбранной памяти г. произвольным доступом на базе следующего тактового импульса.
Логика выборки RAM 400 РЫДЛОТ 3-разрядный выходной сигнал на линейное при5 водное устройство 416 Линейное приводное устройство 416 попучлот четзер- тый разряде мосгной программу омой пазовой c/ CML-i тактирования 414. Мсстнлч бг.зогзап схема гокт рое-аник 414 программируется системным компыо,;оог-. 100 и РНДП- Т одпоразрядный пыходной сигнал для управления установочной точкой напряжения в зональном приходном усгройсгве. Величина установочной точки напряжения является функцией среднего частотного уровня выхода данного конкретного зонального приводного устройства.
На фиг. 6 представлена логическая таблица истинности для логики выборки RAM 400. Сигнал разрешения фиксации 116, сигнал выбор-1 110 и сипал ,выбор - 0 120, поступающие с центрального контроллера 108, определяют, какая выбрана память с произвольным доступом для вывода логикой выборки RAM 400. Когда сигнал разрешения фиксации 116 имеет значение ложческой 1, а оба сигнала оыбор-1 118 и выбор - р 120 имеют значение логического О, запоминающие устройства с произвольным доступом заблокированы и выходное значение логики выборки РАМ 100 имеет величину логическою О. Когда сигнал разрешения фиксации 116 имеет значение логической , сигнал выбор-1 118- значение логического О, з сигнал выбор - -120 - зппчйнг.с лон .чоской Г1, логикой выборки RAM 4GO выбирается RAM X устойчивого го- счоянг.;; (RAM 404) для вывода данных па линейное приводное устройство 416. Если сигнал разрешения фиксации 110 снова имес значение лошчеекой , сигнал выбор - 113 - значение логической Г, а сигнал выбор - Ј120 - значение логического О, для вы иода на лг.нииное приводное устройство 416 логикой выборки RAM 400 выбирается RAM V переходного состояния (RAM 403). Когда сигнал разрешения фиксации 116 riMcer значение логической 1, в то время как оба CHI нала выбор- 1 18 и выбор 0120 имеют Т. значение логи -пской 1 для вывода с лотки выборки RAM 400 на линейное приводное устройство 416 логика выборки RAM 416 вы5ирэег RAM Z устойчивого состоянии (RAM 412). Когда сигнал разрешения фиксации 116 имеет значение логического О, логика выборки RAM 400 фиксирует значение своего выхода, которое было до значения логического О. Этим выходным значением будет 3-рззрядная величина с одного из запоминающих устройств с произвольным доступом,
На фиг. 7 показана логическая таблица истинности выходов с центрального контроллера 108 относительно логических состояний логики выборки RAM 400. Когда запоминающие устройства с произвольной выборкой заблокированы, сигнал выбор-1 118, сигнал выбор- 0 120, сигнал 114 базовой схемы тактирований X, сигнал 112 базовой схемы тактирования Y и сигнал 110 базовой схемы тактирования Z имеют значения логического О от центрального контроллера 108, Когда требуется выбрать
РАМ X, сигнал выбор-1 118 имеет значение логического О, с центрального контроллера 108 подается сигнал 114 базовой схемы тактирования X для стробирования адресного счетчика 402, а сигнал 112 базовой схемы тактирования Y и сигнал 110 базойЬй схемы тактирования Z имеют значения логического О. Когда требуется выбрать РАМ Y. сигнал 118 выбор-1 имеет значение логической 1, а сигнал выбор- 0 120 - значение
логического О, с центрального контроллера 108 подается сигнал 112 базовой схемы тактирования Y для стробирования адресного счетчика 406, в то же время сигнал 114 базовой схемы тактирования X и сигнал 110
базовой схемы тактирования Z имеют значение логического О. Когда требуется выбрать RAM X, сигнал 118 выбор-1 и сигнал 0 120 пыбор- имеют значение логической 1, с центрального контроллера 108 подается сигнал 110 базовой схемы тактирования X для стробирования адресного счетчика 410, а сигнал 114 базовой схемы тактирования X и сигнал 112 базовой схемы тактирования Y имеют значение логического О.
На фиг. 8 показана схема зонального приводного устройства 136. Понятно, что фиг, 8 просто характеризует все зональные приводные устройства системы изобретения. Как было отмечено, зональные приводные устройства, такое как приводные устройства 136, модифицируются путем включения схемы логического вентиля 520 и части преобразователя частота-напряжение
схемы Б08. Обе модификации являются „ обычными и понятны специалистам в данной области техники без дальнейших объяснений.
Зональные приводные устройства 136
имеют шесть силовых транзисторных переключателей, организованных в пары: 530, 532, 534, 536; и 538, 540. Трехфазный входной сигнал переменного тока 528, подаваемый на зональное приводное устройство
136, выпрямляется, ограничивается и фильтруется обычным путем для приложения к силовой стороне зонального приводного устройства 136. Часть управления напряжением схемы 508 измеряет напряжение на
5 второй шине 531 приводного устройства и переключает инвертор 527 для согласования напряжения второй шины приводного устройства с установочной точкой напряжения, предусмотренной системой управления напряжением Часть выходной эащи.-ы схемы 508 предназначена для отключс.нил зонального приводного устройства 136 ч случае возникновения потенциально опзс ного состояния. Часть выходной защиты схемы 508 обнаруживает любой сбой по гоку через шунт 524 и посылает соответствую- щий сигнал на схему логического вентиля через выходную линию расцепления 510 для размыкания всехсилопыхтранзисторов, что необходимо для защиты приводного устройства 136.
Вентильная логическая схема 520 зонального приводного устройства обеспечи- вает подачу цифрового входа на СИЛОВЫР транзисторные переключатели для управления выходом зонального приводного усг ройства 136 с целью запитывания витков 0 А, 0 В и 0 С катушки 138 первичной обмотки 152. 4-разрядный пароллечы-шй входной сигнал 500 подается с линейного приводного устройства 416 зонального контроллера 128 (показанного на фиг. 5) на вход зонального приводного устройства 136. Из 4-разрядного параллельного входного сигнала 1 разряд питает частоту для части пра- образователя напряжения схемы управления напряжением и выходной защиты 508 с целью установления среднего уров- ня напряжения для приводного устройства, а 3 других разряда содержат двоичные команды для переключения силовых транзисторных переключателей с цепью управления частотой и фазой питающего сигнала для запитывания намогки 0Л. 0В и0 С катушки 138.
Вход А, связанный с витками 0Л катушки первичной обмотки, подаете на оп- то-изолятор 514, вход В, связанный с витками0 В катушки первичной обмотки, подается на опто-изолятор 516, а РХОД С, связанный с витками 0 С катушки, - на опто-изолятор 518.
На фиг. 9 показана логическая таблица истинности для входов и выходов вентиль- ной логической схемы зонального приводного устройства 520, показанной на фиг 8. Три разряда с линии 500 вызывает переклю- чение силовых транзисторных переключателей, в результате чего образуется шестишаговый питающий выходной CHI нал /зля каждой фазовой катушки, который согласуется с частотной структурной, показан- ной на фиг. 3. Однако можно использовать и другие питающие сигналы, гакио как сш- иалы широгно-импульсной модуляиии, что
-(ШПиш Г I .-irM mM п ,Ж СЧ1
mem п
При ро50Т 1ИРГ71- ПГК ГСКИЛ ПЫМ1ДНМЧ
линии с веииыьно --пическои схемы эГО подоютсл ч РХОП гглоп. ч транзисторных, переключающих пли ч иг рнно 530, 532. 53х), 536; и 538,540, вызывая vn переключение по заранее определенному способу для создания легтпшапго о трочЛазного питающие го сигнат ПоЗ ).v пв тд ллтлчнои команды п зоюльное по (о ц t ю }i гго йстпо 36 из
ЗОНАЛЬНОЮ f .3 П -С 1. ОДИТ К (r f« пшг-,ош. с1 ( ;,ля запитыва- ь,1 ьатуШ з ни ч , -, 0 R и 0 С г. цоак1 и твою c lr-p -, . п рсботчи желае- , трам ;|, 01Н л г,1 №, ihi- n первич- юи е с H /V -I. ч :-Oif4i i: фазой
In фиг. 10 niKfj Ti ларзчгерный проф- ч-i- пгтотной крутани. 1 мраО-Ч1ЫРяемый в зпне усчорени 1 первичной оЬмтки из двоичных хомлн/ чрэ; .1ммх и пзмпти с пооиз- . i/a-in, M доступе , ьк -10 Профиль,- озоэг .мчгннь иифрзп 60С ограмаьт мгно- частоту сигнала, выря- батм чэсмог о .с рви ч нон обмотке ппрпд :г|С1ЫЭй , спгналп оГюз- нячсннач цифрой отрахо т частоту и | fuy HiNieiif zuioro гергг енною гока(или
Г|ЧТс)1( ДОГОСИ| H, ;u. f-iOp I itpOXO,tH1i В Kd
тушках пср-чм ч чгмо1 и согласуясь с крутил Oh acroTt.i.ic mc4 uns. показанного оОизп ченин оО Кнждь-и частотный
ПООфИг;Ь COO U 4 t. ДЗП Ц 11 I- ОДИН ДЛЧ КоЖ,iO(0-ЧИК-ЛУ. ч.Ч1гч г, Сремя Т гредглав 1РС1 тс/ , которое требуется ,jj г Срень,1хг( л д ч /aovr за доу
ОМ СОСС ДН IA ЬТОр . I 1- / ОПМ(ТОК МИМО фИК- UlpOBahhOl , ITO/lOHMOu TO IKU Я ПРрВИЧНОЙ
гвмочке п,)ц г пооизчольным , ггч/пом CyTiT iv мппатг- полных цикла перед riOBTOp -incM
На обсзчачениях, iios эламчы/: цифрами 600 и пЬО, течеч 4 5 цикпимеггпго времени Т п гочка 60/ и ПО 1 root пет гвенно часто- гл угтгпичличаетср в исходно 1 состояние Эта устэнопка помп ю того что является начатом нового ч стотцово наклона, также
-1СПЫТ11г19С;Т 180-ГС5Ду- ЧИИ фЛЗОВЫИ СДВИГ.
Это; HS -rntUjyCHU i сдпиг необхо-, дчм, потому что госел.- .л вгоричные обмотки имеют противоположно расположенные магнитные полюс-э.
На Фиг. 11 rpr фическое поед- с явление двоичн ч комзчды для в1 (ходов 0А, / ) В 1л 0С и т ,-опйльно о гоиаодного устройства против адреса тгчть ч кото- оому Г1|)иислОди7 .iiuetw .t. -1 фазово О угла. Такхе на 1мг. i I пс-d MI СчотистсгByiO Ul n ПОдЬСМ )OfOiHO,v РГ)ОфИ, v дТЯ
одного цикла времени, представленного на
фиг. 10.
Как отмечено, пояуцикл переменного тока вызывает перемещение ЭМ волны иа один полюсный шаг или 1 А . Поэтому положение вторичной обмотки, продвигаемой такой ЭМ волной относительно зоны первичной обмотки, может прослежиоаться по сигналам двоичной команды, как указано обозначениями Я под графикам 0 А. Длина из зон первичной обмотки равна или кратна 1 А . Это будет означать, что любая вторичная обмотка всегда будет передаваться из одной зоны о следующую в кратной А позиции. Однако зоны не обязательно должны иметь равные А длины.
Когда вторичная обмотка начинает входить в зону (и позиции GOO), фазовый угол равен 0°. В позиции 680 также устанавливается в исходное состояние частотный наклон на базе двоичной команды по адресу памяти выше адреса 200. Передача и установка с исходное состояние происходит одновременно по тому же адресу памяти. С точки одновременной передачи и установки в исходное состояние фазовый угол и частот увеличиваются с течением времени, что показано положительным наклоном мгновенной частотной кривой. Эго также видно из умененьшеиной ширины соответствующих импульсов 0А, 0В и0 С, когда они движутся вправо, Частотный подъем происходит непрерывно до тех пор, пока вторичная обмотка но начинает Рходить о следующую зону первичной обмотки в позиции 682 с фозойым углом 1080° и по адресу памяти, непосредственно предшествующему адресу 1100, где имеет место следующая передача. Частота для зоны, которую покидает вторичная обмотка, продолжает подниматься до тех пор, пока не завершится передача. Только после этого устанавливается в исходное состояние частотная структура. Во время установки о исходное состояние частотная структура тлкж.е осуществит 180-градусный фазовый сдвиг для принятия следующей вторичной обмотки с противоположно расставленными мэгнита- ми.
Фиг. 12 дает главным образом графическое изображение сложных частотных наклонов участка ускорения системы по настоящему изобретению. Частотные профили, которые составляют сложные частотные наклоны, являются повторяющимися профилями зуба пилы для каждой зоны, которые соответствуют профилям смежной с ней зоны и перекрывают ее. Эго соответствие и перекрывание позпппяет плавно передать вторичные обмотки из одной зоны i. другую.
Чтобы правильно продвигать втори ;- ныо обмотки предпочтительно иметь такую
конструкцию системы, при которой какая- либо одна вторичная обмотка проходила бы через одну определенную зону ускорения или второй постоянной скорости любой длины за время, меньшее чем фиксированное
0 циклическое время, которое на фигуре 2 обозначается как циклическое время Т. Циклическое время Т является функцией первоначального минимального интервала вторичной обмотки и фактической скорости
5 вторичных обмоток, когда они входят в систему, Однако в течение циклического времени Т в определенную зону будет входить только одна вторичная обмотка. Когда система работает, а первая вторичная обмотка
0 достигла конца первичной, система будет содержать максимальное число вторичных обмоток, поэтому с этой точки для того, чтобы какая-то вторичная обмотка вошла в систему, другая должна покинуть ее, тем
5 самым поддерживая постоянное количество вторичных обмоток в системе.
На фиг. 12 показано ускорение вторичных обмоток от первой постоянной скорости, что обозначено на F1 цифрой 700, ко
0 второй постоянной скорости, имеющей более высокую величину, что обозначено на F2 цифрой 726. Частотный профиль зоны 1 является постоянным частотным профилем, работающим на частоте F1, а частотный
5 профиль зоны 8 является постоянным частотным профилем, работающим на частоте F2. Промежуточные зоны (зоны 2-7) с профилями частотного подъема являются зонами ускорения, через которые происходит
0 ускорение вторичных обмоток от частоты F1 . к частоте F2.
Как показано на фиг, 12, циклическое время Т представляет собой интервал времени, с которым соседние, близко располо5 женные вторичные обмотки входят в систему ЛСД системы изобретения.
Вторичные обмотки А, В, С и D являются индивидуальными вторичными обмотками, которые входят в первую из множества зон
0 ускорения из первой зоны постоянной скорости через интервалы времени Т. Во время to вторичнаг,, обмотка А перемещается вдоль первичной обмотки s зоне 1 с постоянной скоростью, определяемой частотой
5 F1. Когда вторичная обмотка А продвигается дальше вправо в зоне 1, во время, обозначенное цифрой 714, она передается в зону 2, чья частотная и фазопая установка в исходное состояние были согласованы с этими параметрами зоны 1 в точке 714. До
завершения передачи частота а зоне 2 продолжает работать с частотными и фазовыми параметрами зоны 1. После завершения передачи в позиции 702 частота в зоне 2 начинает подниматься в соответствии с заранее запрограммированной двоичной командой, хранимой в зональном контроллере зоны 2, в обычном случае -- в RAM X, 404. По мере частотного подъема вторичная обмотка А положительно ускоряет ся по первичной обмотке. Вторичная обмотка А будет продолжать ускорение в соответствии с частотным наклоном частотного профиля зоны 2 до тех пор, пока она не достигнет точки 716, где она передается в зону 3. В точке передачи 716 сигнал зоны 3 и сигнал зоны 2 мгновенно согласовываются изменением частоты и фазы, когда вторичная обмотка полностью пересекает стык между зонами, и происходит плавная передача вторичной обмотки. Во время передачи между зонами ускорения система согласно изобретению согласовывает непрерывно изменяющиеся частоту и фазу, но не прерывает ускорения вторичной обмотки плоским участком постоянной скорости, что имеет место в системах известного уровня техники. После завершения передачи частотный профиль зоны 2 устанавливается п исходное состояние.
После выполнения передачи в точке 716 последующие передачи п точках 718, 720, 722, 723 и 724 между оставшейся частью соседних зон ускорения, между последней зоной ускорения и первой зоной участка второй постоянной более высокой скорости и между следующими друг за другом зонами участка второй более высокой скорости происходят таким же образом, как описано выше.
Как показано на фиг. 12, следующий друг за другом вторичные обмотки В, С и D входят в систему в кратные Т моменты времени, а именно t0+T, t0i2T и to+ЗТ соответственно и ускоряются так же, как и вторичная обмотка А. Далее, как видно из чертежа, ни одна из вторичных обмоток не находится одновременно с другими в одной и той же зоне ускорения или второй постоянной более высокой скорости; следовательно происходит независимое ускорение и расставление отдельных вторичных о5мо- ток.
На фиг. 13 показано графическое изображение положения относительно времени для двадцати вторичных обмоток, перемещающихся через систему согласно изобретения. Со ссылкой на фиг. 13 будут описаны операции устойчивого состояния и переходного состояния
Рядом с абсциссой графика, показанного на фиг. 13, находятся характерные зоны 1-13. длины которых в А указаны в скобках. Отдельные зоны обозначены сокращения- 5 ми, например Z 3. что представляет зону 3. Абсцисса графика размечена градусами фазового угла вместе с их соответствующими эквивалентами, выраженными в А . Положение вдоль первичной обмотки любой пто0 ричной, которая входит к систему, можно определить ее фазовый угол. Это так, потому что полюсный шаг ЭМ вочны зафиксирован как А , что согласует полюсный шаг катушки первичной обмотки, например, фа5 лч А - фаза А, ЖМ воина и любая вторичная обкогка, засинхромизировэнная с ней, будут перемещаться из расстояние 2 Я вдоль первичной обметки при v-ахдом 360-градусной фазовом изменении результирующего
0 переменного тока, питающего витки катушки первичной обмотки, которая создает ЭМ волну. Р стояние. на которое переме- стилась вторичная обмотка вдоль первичной, может быть определено следующим
5 выражением: Положение зторичной обмотки 2 А (фазы, где фаза измеряется в или градусах переменного тока, поделенных на 360°. Поэтому положение вто- phMHOrf обчотки адог.ь первичной может
0 быть там ., как показано по абсциссе либо в фазовом угле, либо в (N) А - где N - это положительное число.
Значение двоичных команд используемых для со-здлния питающего сигнала дян5 ной частоты и фалы, может быть определено путем перевода фазового угла в кривую для данном конкретной вторичной обмотки и последующего перевода положения на кривой в определенное врр.мл вдоль сигнальной хз0 ракгсрыстики, например, предъявленной двоичным выходным сигналом для двоичных команд 0 А 814. показанным под ординатой графика. Значения высокого и низкого уровней берутся из таблицы истин5 мости.
Сигнал 814 представляет собой заранее определенные Л-фазнуе двоичные команды для п тдющяго сигьала 0А. предназначенного для создания ЗМ волны с целью продви-
0 ;-.сния вторичной аб ;отхи через систему вдоль кривой 802. Понятно, что путем сдвига на 60° (или на 1/3 Я) или 120° (или 2/3) Я). от каждой целой .чиниць: л первичной обмотки можно опрс , -лить сигналы дроичных
5 к-оманд С-фазы и 8-фаоы соответственно. По существу, двоичные сигналы С и В похожи на А-фазный сигнал 814. за ис члючением того, что они сдеинути на 60V или 120 вправо соответственно. Также мо,ио видеть что
сигнал двоичных команд А-фазы на обозначении 8И постоянен на первой постоянной частоте (участок 816), упелмчивается на изменяющемся частотном участке 820 и сноса становится постоянным, но на более высокой частоте на участке второй постоянной частоты 822.
Конкретные сигналы устойчивого состояния, как показано на обозначении 814 фиг. 13 для 0А, получаются на основе заранее определенного положения вторичных обмоток вдоль первичной обмотки п заданный момент времени. Поэтому, чтобы загрузить в запоминающие устройства с произвольным доступом приводных контроллеров правильные команды, используется следующий метод для получения таких команд.
Сначала определяется интервал движения вторичных , входящих п систему. Это также определяется повторяющийся интервал времени Т меж- ДУ дсумя следующими друг за другом вторичными обмотками, которые движутся мимо фиксированной эталонной точки а системе. Положение относительно профиля времени определяется для гсех вторичных обмоюк системы, когда все вторичные обмотки лишь следуют одному и тому же положению относительно профиля времени, сменяясь через промежутки времени Т. После этого ячалпгично определению положения относительно профиля пременл сп- ределпетсл фа.опнй угон относительно времени длч какдпй двоичной обмотки системы через промежутки времени Т. Поспе этого определения для каждой зоны делается определение фазового угла относительно времени путем (1) пыбора начального фазового угла, соотпетствующвго выбранному положению вторичной обмотки, до того, как эта пторкчпал обмотка пойдет а определенную зону; -тпсм положением о настоящем изобретении является положение, при котором переднг; 1 крал вторичной обмотки находится на границе зоны, ч.е. в начале передачи ; (.) определения из фазового угла относительно информации рремени интервала информации длиной Т, начиная со стартового фазового угпз для определенной зоны; и (3) обеспечения согласования начальной информации фазового угла OTHOCVI- гельнс времени для определенной зоны г. информацией предыдущей зоны по фазовым углам, соответствующим длине рторич- ной обмотки, имея в оиду ту длину, которая необходима вторичной обмотка для полного пересечения физической границы зоны, но если это не так, необходимо отрегулировать положение относительно профиля времени или длину зоны с последую им повторением вышеуказанных шагов. В описанном процессе именно третий шаг обеспечивает присутствие в зоне участка ускорения только одной вторичной обмотки в любой заданный момент времени.
После того, как сделано определение фазовых углов относительно времени для каждой зоны, определяются переключающие сигналы зонального приводного устройства для каждой зоны. Это определение выполняется путем (1) кодировки информации фазового угла относительно времени длл каждой зоны в двоичные команды переключения в дискретных точках в пределах
информационного интервала времени Т2, где (а) точки должны быть одинаково расставлены и точно делить интервал времени Т и (б) количество точек должно быть одинаковым для всех зон, причем это количестпо также равно числу ячеек памяти для данного типа запоминающего устройства для всех соответствующих зональных контроллеров; и (2) размещения команд переключения для каждой зоны в общем
интервале времени, обозначаемом как Тс, при помощи; (а) деления общего времени, требующегося вторичной обмотке для достижения выбранной начальной фазы, которой в настоящем изобретении является
начало передачи, на интервал Т с целью определения остаточного времени за последним целым интервалом времени (б) начала общего интервала времени Тс с вышеупомянутого остатка интервала временп Т и отображения команд переключения, начиная с команд стартовой фазы и продолжая до конца общего интервала времени Тс, и (в) продолжения с начала общего интервала времени Тс отображения
оставшихся команд, посредством чего оставшиеся команды завершатся при отображении на командах стартовой фазы.
При работе системы после выполнения вышеуказанных действий команды переключения зональных приводных устройств, поступающие из запоминающих устройств зональных контроллеров одиночного типа памяти, RAM X, Y или Z, одновременно и непрерывно синхронизируются, начиная с
общего стартового времени, которое в изобретении о предпочтительном варианте находится в начале обшего интервала времени Тс. Это приведет к тому, что каждая зона начнет и будет повторять свои команды переключения для каждого интервала времени Т для каждой вторичной обмотки. Теперь путем подачи вторичных обмоток в систему в начале каждого интервяла времени Т перемещения их пл первоначальной
системной скорости будет достигнута синхронизация вторичных обмоток с ЗМ РОЛ- НОЙ и их правильная передача из одной зоны о другую через всю систему
Снова обратимся к фиг. 13: нэ оснопе положения данной вторичной обмотки вдоль первичной псегда известно расстояние этой вторичной обмотки по отношению к соседней. Возьмем для примера первую вторичную обмотку, перемещающуюся по кривой 802: если передний край этой вторичной обмотки находится в точке 806, то он расположен по фазовому углу 1760°. Проходя от кривой 802 до кривой 804 дпя второй вторичной обмотки, линия пересекается п точке 808, ставя передний край второй пто- ричной обмотки п разовый угол 720°. Это означает, что между передними краями существует промежуток 3 А . Так как каждая вторичная обмотка имеет длину Я , расстояние между магнитными границами этих вторичных обмоток в этой точке составляет 1 Я . Подобным же образом первая вторичная обмотка со своим передним краем в точке 810 расположена вдоль кригюй 002 на 6 Я впереди второй вторичной обмотки, передний край которой будет находи ься п точке 812 вдоль кривой 804. Это увеличенное расстояние означает, что следующие друг за другом вторичные обмотки индивидуально ускоряются в соответствующих зонах ускорения, независимо от других вторичных обмоток.
Метод смены первого устойчивого состояния переходным состоянием, а затем вторым устойчивым состоянием будет описан со ссылкой на фиг. 13. Когда вторичные обмотки с 1 по 10 входят в систему, все они продвигаются первым устойчивым состоянием, как ото устсжэвливается, например, из RAM X зональных контроллеров, Действительность этого будет сохраняться до времени to+ЮТ.
Первая и вторая вторичные обмотки, перемещающиеся через систему по кривым 802 и 804 соответственно подвержены воздействию только одного условия устойчивого состояния из RAM X. Вторичные обмотки 3-11, которые перемещаются через систему по кривым 805, 807, 809, 811, 813, 815, 817, 8-19 и 821 соответственно, в некоторой степени подвержены влиянию переходного состояния, хранимого в RAM Y зональных контроллеров, когда во время to+ЮГ происходит выбор переходного состояния для изменения устойчивых состояний работы. Вторичные обмотки 12-20 перемещающиеся через систему по кривым 823, 825, 827, 829,831.833, 835, 837 и 839 соответственно,
будут .ледоВ чь пишк Vf- юичи -и- го Сч зотоянил когсрыс рэпчтся п НАМ зональных контроллеоов но птооиIH.IH обмотка 11 не ПО ИНРТсистему условиевто- on го устойчивого состояли, определяемое RAM Z, нельзя будет установить
Когда требуетеч осуществи гь переход пэ перрого устойчивого состояния оо mo- рое, для ггех тэнчгц.них конфогерон п: би
рается переходное гогголкио то, которое
хрятпгя г RAM v Кз рог на фяфикс, прррходное пыбир.тетсч во время to-MOT. состояние работает, на- чинли-со времени v1 , времени tcH 18T.
5 показан,ып кчк 824 и 834 соответственно. Во гремя ьЧ81 мо ичная об- мог;;т (вторично о :-|0ткя }, ,ia которую погдсйсгвуен перо /; юе cov TCSHHO. покидает систему
0Когда выбрано переходное состояние,
оно будет врчдеиг.трчят мл вюричные обмотки вдоль ччстп иечш.ччой оОмотки, пре- терпрпр ощв nft t на аторичные обмотки, которое яхо/кп в ту часть, мретер5 певавшую i MetiPf Ht- u течение определенного , когда происходят изменения, IJ-UM образом, во время t0 ЮТ, прослрхигэоч мячик 824 поерх ст конца учясткя постоянной скорости плюс 2Я
0 на псзици 1 80П, можно чидеть, что вторичными обмотками г системе во времч 10+10Т япляю оя ртори ;ц| е обпотки с 3 по 8. Эти вторичные обмотки подвержены воздействию переходного состояния во время
5 to Ч ОТ. Go врепр, огд.г/ происходит изменение (период, охваченный обозначением 815), во действиг пг.адиваегся на вторичные обмотки с 9 по М
Во время тре одного состояния сиг0 иял, питающий первичную обмотку, не является повторяющимся, как это имеет место для работы устойчивого состояния Непов- торяющиеся формы сигналов, показанные участком 838 характерных сигналов 850, 860
5 ц 870 для зон ускорения 5-7 соответственно, являются изображениями, этих сигналов. Только со второго устойчивого состояния, поктзнного как 840 ссе зональные сигналы T3Kt.fi клк 850, 800 и 870 для зон 5-7
0 соответственно, начинают повторять свои формы, указывая на операции устойчивого состояния,
иасть 815 nep YOflHOio состояния между линиями 824 |i P3 и выше линии 800
5 япляетсл частью пнутри которой меняются наклони кривых, В часп В15 рло ление вторичных обмоток, по -сидамщи систему, имеет npONi3vyT H гзр(чмег;и %1С1/.ду еоседниМИ ЕЛОрИЧНЫМК О ОТКсТМИ, о ЛОрЫС /fiPHb- Ш31ЭТСЛ ДО МИ,Ч . иЛ|. . Т
нормального промежутка времени Т, причем минимум имеет место между оторичны- ми обмотками 5 и 6 вдоль кривых R09 и 811 соответственно Это указывает на изменяющийся характер крипых и пазличий в скорости вторичкух обмоток. После пинии 83 до линии 834 устанавливаются новые скорости устойчивого состояния, но ни одна кривая не имеет новою наклона по всей своей длине, что указьшает на остэточноо влияние переходного состояния на эти кривые. Это также означает, что время, когда следующие друг зэ другом вюричныо обмотки покидают систему, не стабилизировалось и вернулось к промежутку времени Т, Пока такая стабилизация не достигнута, не устанавливается полностью новое условие устойчивого состояния, во. время которого может быть инициализирован второй сигнал устойчивого состояния из RAM Z для запитивания первичной обмотки и продвижения пторичных. Разделителыое время между вторичными обмотками, покидающими систем , непрерывно увеличивается от ммничума между вторичными обмотками 5 и 6 вдоль кривых 809 и 011 соответственно до промежутка времени Т ме/кду вторичными об.отками 1 и 13 РДОЛЬ кривых 8 и 825соо1всттвенно непосррдствекно после линии 834, когда происходит инициализация второго устойчивого состояния. По ло- му дс гого, как мочено будет инициализирован- второе устойчивое состояние, систему необходимо освободить от всех вторичны обмоток, на котор.ые воздействует переходное состояние.
При работе логика выборки памяти с произвольнчм доступом длч все зональных контроллеров будет действовать с командами устойчивого состояния, хранимыми в RAM X до времени т0ЧОТ (824). В это время логика выборки памяти с произвольным доступом будет выбирать пе- реходноэ сосюяние путем выбор RAM Y. Переходное состоя ние будет деист вовать со времени ь+ЮТ на № 824 до времени to 1ST на № 834. То есть, переходное состояние имеет запрограммированное время работы 8Г. Это запрограммированное время является временем, в течение которого все вторичные обмотки, на которые воздействует переходное состояние, выводятся из системы. Во время tn+8T контроллер аптсматиче ски направит логику выборки памяти с произвольным доступом на выбор RAM Z для задействования системы в новом устойчивом состоянии. Работая во вюром устойчивом состоянии для РАМ Z, системный компьютер может перепрограммировать RAM X и RAM Y новыми двоичными ком.ж
дами Это новое программирование обеспечит RAM X новым устойчивым состоянием, которое может быть для более высокой или более низкой скорости вторичных обмоток
Новое программирование для RAM Y будет сделано с целью перехода из устойчивою состояния RAM Z в новое устойчивое состояние RAM X
Переходные команды для выполнения
0 перехода из первого устойчивого состояний во второе берутся на основе заранее определенного положения относительно времени каждой вторичной обмотки, продвигаемой вдоль первичной определен5 ними зонами в течение общего переходного времени Ниже дан метод определения команд, подлежащих загрузке в запоминающие устройства с произвольным доступом переходного состояния множества зональ0 ных контроллеров, для выполнения перехода из первого устойчивого состояния во второе.
Как это имело для операций устойчивого состояния, вторичные обмотки
5 оходят в систему с заранее определенным промежутком интерпала времени Т Пер- ьоначально определяется положение относительно профиля времени для всех вторичных обмоток в системе при инициа0 лизации переходного состояния. Однако, вторичные обмотки, находящиеся в системе или входящие в нее во время переходного состояния, не следует одному и тому же положению относительно профиля време5 ни. Таким образом, для начала происходит определение взаимосвязи положения относительно времени, требуемого для каждой вторичной обмотки, на которую оказывается воздействие во оремя переходного состо0 яния, с учетом требования, что только одна вторичная обмотка может быть в зоне в любой заданный момент времени Для каждого положения относительно профиля времени для соответствуюа х вторичных
5 обмсюк делается определение фазового угла относительно времени После этого для каждой зоны производится определение фазового угла относительно времени путем (1) определения во время инициализации
0 переходного состояния профиля вторичной обмотки, которая находится в определенной зоне, или, если определенная зона пуста, профиля последней рторичнои обмотки в этой зоне и создания из профиля фазового
5 угла относительно информации времени; (2) определения из фазового угла относительно информации времени вышеустановленного профиля, интервала информации, начинающегося во премя инициализации переходного состояния, который будет кратен
интервалу Т, и продолжающего интервал до стартового фазового угла первой вторичной обмотки, входящей в зону после инициализации переходного состояния, тем же самым способом, как описано выше для устойчивого состояния; (3) определения изфз- зового угла относител- но информации времени профиля первой вторичной обмотки, где интервал информации начинается со стартового фазового угла этой вторичной обмотки и продолжается до времени, когда вторая вторичная обмотка входит о зону; (А) определения из профиля пторой вторичной обмотки требуемой информации, как указано в вышеприведенном пунюе 3; (5) продолжения процесса определения по Bt шеприведенному.пунхтуЗ для каждой последующей вторичной обмотки до момента достижения каждой конца интервала переходного времени, обозначаемого как Т, который будет происходить кратно Интерполу времени (б) обеспечения согласования фазового угла относительно информации времени для каждой нюрич- ной обмотки, входящей в зону во время переходного состояния, с информацией для той же вторичной обмотки и предыдущей зоне хотя бы по фазовым углам, соответствующим длине вторичной обмотки, имея о виде длину, необходимую вторичной обмотке для полного пересечения физической границы зоны, но если это не так, нужно отрегулировать положение относительно профиля времени или длину зоны; (7) кодирования фазового угла относи гельно информации времени для каждой зоны и двоичные команды переключения о дискретных точках внутри интервала Тг переходной информации, где (а) точки должны быть равномерно расставлены и должны -|Очно делить каждый интервал Тг внутри интервала Тг и (б) количество точек должно быть одинаковым для всех зон, причем это количество также должно быть равно числу ячеек переходной памяти для всех зональных контроллеров; и (8) отображения команд переключения для каждой зоны в общий интервал переходного времени Тг одна за другой.
Чтобы действовать в переходном состоянии, система сначала работает о первом устойчивом состоянии, а переходное состояние выбирается для всех зональных контроллеров в конце выполнения последней команды памяти с произвольным доступом первого устойчивого состояния. По следующему синхроимпульсу переходные команды одновременно выдаются из всех зональных контроллеров с началом общею интервала переходного времени Тг Это заставляет
всех зонзл1,чые контрс лл иы синопремеьчо выдавать переходные; комлнды до тех пор, пока их соответствующие запоминающие устройства с произвольным доступом не до5 стигнут в унисон конца переходного периода. Когда конец переходного периода достигнут, происходит выбор и инициализация второго устойчивого состояния. Переходные команды не являются
0 повторяющимися и аыдзюгсп только один оаз с последи эк командой, заканчивающейся в заранее определенно время, кратное . времени Т. Д.1Я тех вторичных оПмтгок, на которые OKfi3HHsei воздействие
5 переходное состояние, первоначальная кривая для мх прохождения через систему помечается символом штрих, т -ж, дл чри- УОЙ 8 оэ первоначальная кривая имеет обозначение 8.
0Изобретение раскрывает систему для
продвижения ьгоричных оомоток по удлиненной первичной оПмотке. Также предио-- лагаечсг, что изобретение может иметь ответную сторону, возвращающую вторич5 н.ме обмотки из конца в начало удлиненной первичной обмогки. В получающейся системе вторичнын обмотки возвращаются н начало удлиненной первичной обмотки путем противоположною ускорения вторичных
0 обмоток по ответной стороне. Эта ответная сторона может быть зеркальным изображением удлиненной первичной обмотки для целей ускорения вторичных обмоток или ей могут быть другие соответствующие средст5 за, которые Суду годаьйи, «тооччные обмотки назад во входную зону удлиненной первичной OUMOIKH,
В предпочтительном иариачте осущест0 вления, когда предусмотрена ответная сторона, образующая бесконечную петлю для вторичных обмоток, система данного изобретения особенно подходит для использования о вытяжении или растяжении полотна
5 листового материала или пленки в растяжной раме.
Более подробно с привлечением, в частности, чертежей 14 и 15 показывается устройство или растяжная рама 901, которая
0 подходит для вытяжения полотна листового материала 961, такого как пластиковая ппенка, с целью улучшения его свойств.
При работе того устройства полотно пленки, подлежа ii тытяжению, подается
5 из подающего источника 91 о. тзкого как подающий оолик. ипи из узла лить пленки и передиигаегсй при помощи соответствующего средств в растяжную раму 899, кото рая включав нору удлиненных бесконечных контурных in;,:-чТОО,/. -- пот и 900 и 902.
расположенных друг напротив друга. Обе петли 900, 902 симметричны - элементы петли 900 зеркально отражены в петле 902. Зажимные растяжные каретки показаны как белые точки на черном поле, такие как ка- ретки 908, 908 в двух петлях. Каретки продвигаются по рабочим сторонам 910 и 912 петель 900 и 902 соответственно в полярной симметрии. То есть, каретки, такие как 905 и 908, выраанены по линии 914, пропеден- ной перпендикулярно к центру линии 904, которая является осевом линией между рабочими сторонами двух петель.
Каждая контурная петля имеет ряд частей или участков, которые определяют рабочие стороны 910 и 912 и возвратные стороны 903 и 923 растяжной рамы. В частности, первая часть направляющих дорожек определяет транспортный участок 918, где происходит предшествующая вытяжению выдержка пленки при необходимой температуре нагрела без ее натяжения.
Вторые части направляющих дорожек определяют ключевой участок растяжения 922 растяжной рамы. Эти части данного участка обычно расходятся GO внешние стороны от осооой линии машины для растяжения полотна в поперечном направлении.
Третьи части дорожек соединены со вторыми частями на переднем или рабочем участке растяжной рамы. Эти части находятся напротив друг друга и раиноудалены от осевой линии рамы; они определяют между собой стабилизирующий участок 926 устройства.
Эти первые, атсрые и третьи части дорожек смеете определяют рабочие стороны 910 15 912 растяжной рамы. Дорожки заканчиваются на возвратных сторонах рамы 903 и 923 четвертыми частями, где растяжные зажимы отцепляются от пленки. Четвертью части соединяют первые и третьи части дорожек, завершая бесконечные траектории. Нл удлиненных контурных петлях 900 и 902 устаноолен для движения ряд кареток, таких как 900. 908 и 940. К кареткам прикреплены растяжные зажимы, как хорошо видно из фиг. 18, которые адаптированы для захвата краев пленки, когда она входит о растяжную раму 901, м дня освобождения пленки после ее продвижения кареткой через рабочие стороны. После освобождения пленки каретки продвигаются по возвратным сторонам растяжной рамы в положение для повтора операции вытяжения.
Управляющая система линейного синхронного двигателя изобретения используется для управления продвижением кареток
940 по рабочим сторонам контурных трасс 910 и 912, Две рабочие стороны соединены и установлены таким образом, чтобы обеспечивалось общее управление каждой парой зажимоэ -при их продвижении через участок вытяжения и другие рабочие участки.
В обычном применении полотно материала или пленки 961 формируется вверху
по направлению движения на обозначении 916 и подается на вход растяжной рамы в позицию 920. Растяжные зажимы, расположенные не противоположных парах кареток, последовательно захватывают
следующие друг за другом поверхности вдоль противоположных краев пленки в позиции 920 и продвигают ее с первой постоянной скоростью через транспортный участок 918, где пленка нагревается. Дорожки затем расходятся, растягивая тем самым пленку в поперечном направлении, в то же самое премл противоположные пары кареток индивидуально ускоряются, что вызывает их отделение от соседних пар и
одновременно натягивает пленку в продольном направлении на участке вытяжения 922. Нагрев пленки продолжается на участке вытяжения с целью контроля температуры пленки во время вытяжения. Затем
дорожки становятся параллельными и отдельные противоположные пары кареток достигают конечной скорости в конце участка вытяжения в позиции 924, и пленка стабилизируется на участке 926.
Температурный контроль пленки продолжается на участке стабилизации. Затем пленка освобождается от растяжных зажимов на выходе растяжной рамы в позиции 929 и идет на обычный лентопротяжный механизм. Отдельные каретки каждой петли за- тем возвращаются по ответным сторонам 903 и 923 двух бесконечных траекторий - петель на вход 920 растяжной рамы.
Если требуется ослабить пленку или уменьшить ее напряжение в машинном на- прьолении на участках вытяжения или стабилизации, можно понемногу или постепенно уменьшить скорость кареток,
контролируемую линейными двигателями, в соответствии с - любой желаемой программой, тем самым обеспечивая прямое управление усадкой и ровностью пленки. Также возможно и ослабление в поперечном направлении на участке стабилизации, которое осуществляется путем небольшого сведения дорожек растяжной рамы для того, чтобы растяжные зажимы двигались в поперечном направлении ближе друг к другу.
СиММОТрИИ МПЖДУ i -. t-H:,- .(-- .
ВДОЛЬ СТОРОН ПЛОЙКИ ПОТЛИ ООП и ПО ЛИ ::; Л г г,. Г -- ; u; ;. : :,
ДООТИГаеГСЯ За ОЧПТ оОкСПГ МОНИЙ nrnp VlliOVS . ;- .;,, i ,;.;
ОбМОТКОЙ ЛИНЕЙНОГО ДШ1ГатОПЧ (ХЯЛ.ОМ Г КП: -y i V:--. ,. -: ЯГ . . И i г1 - 1 ;.
ДОИ ДОРОЖКОЙ, Причем Пйр. .-:- 00:ГП -. n/V fM. i и j;-iw
обмотка пк/почает ряд фупп катушс-к, T i i ::к птурм х г.. .
что группа катушек п одной 1кннинрпо оП-тог. у к л и;:,-- - / v; 0 Trf4 1
мотке согласопама иг рз;:мору с пр штопп-ркл1г/ -тггт яг-р :11.- -R ,:
ЛОЖНОЙ ГРУППОЙ (;Ч VtJIi л ;;д;уг ОН
первичной обмотко, причом кпкд-т - про- тигзоположпых групп к;П7 | ек : л с:г(р .г- яскм соединена с опрсдоляипой ею одной уп;; : ЛЯЮЩОЙ ЗОНОЙ: ОСКСПОЧ П1Я .-C in O
иторич - 0й обмоткой, прикрепленной . к :;;: дои из кароток, иричег- прикреплгпм г.ч гпт;- рична.ч обмогка н прлги ног ст. первичн(х обмоток; оБесне ои1,;: :; pi-шиой подучи п каждуютра кторню
раССТаРЛСНПЫХ ИЛИ ПрИМЫК П 01М,ИХ К ОППТО1-, i ..---, ПО ч- - Л - ; - ., .. 1 i- ИСХОДНОМ ПОЛОЖОНИИ ЗЗСИН/РОПИ. ИфОШШ- 20 noi-ivnrOll-HP 1.. - Л:КО; ККО ЛОН
ных с согласопанными элокгром пииними ;; : ;
волнами, создлпаемыми п группах к; гу н:кГ; . .- -v- .-.-. ,: -. . . -.;.
Г УПРЛСЛЛ {),ОЙ ЗОНР ИЗ ВХОДО V f f;v. ; М.: :V Т П ,ЧЛ г,.;-:;/ -:. , , : i -/ (Щ ;- .«.: j V;1: 1 - 1-:РЙМЫ, И ОбсСПОЧСНИЯ 3 Jp-3HCe ОПРУДС Л . -ПР.- -Т .: г-1 -: :; Р-Г.;;::; .ш ;ч
МИ СОГЛЗСОПГ1ПНЫМИ уПрГ|ПЛЯК).ЦИ. и КОМ. : . ;- :, ;-: : Ч% ;;. - . р..- Ору П
дами однопркменно всех групп кглумю;1 в:i, jroj rv;- f-. v. ч ч.-;;1 : ..г -T- ipr: каждой управляющей зоне протигюполо::-;-: f;vr;i. -T .: I-:T-,--- ,-..,,..-,;;, --PY,-,:/ -м,, НЫХ ПерйИЧНЫХ ОбМОТОК СОЗДЯ Ч1Н ГГ:М
самым заранее определенных КРОПД Н-ЧГНЫХ ЭМ ПОЛИ FJO UCCX уГфЯПЛйЮЩИХ ЯОП- :-:.
таким образом, происходит снммотр чноо продпижение протипопо;:0;;ич-1: п.о ic-r-pfi- ток п двух петлях через каждую упрпппяю- щею зону и из одной упраг.ьншщен г .он;-.; п следующую через р.чстлжную р-г;му.; Ь
Синхронные вторичные обмотал, гпг-- крепленные к каждой каретке, обсспечш .о- ют синхронное сцепление илм ,1 каретки с электромагнитной полной. здэнной пергзичном обг-юткой i-ia сзспо:: 1 /г; Ч0 равляющих команд. Поэтому, . :-.;VM - непрерыппо подаются н-i рабочую стог.. петли, а протииопо/южнме группы кпгляпк п каждой управляющей зоне од|-К -. получают переменный тох. пырабпт .н .с- мый из тех же самых заранее оппедопоинь .-; управляющих команд, которое o/ijio 1;; - менно координирую ся с командами соседП
них управляющих зон. каретки будутпя;
оставаться о симметрии при споем нопрс- ЬО р. рывном продвижении по рабочим croponjiv;jv-ч
обеих петель.
Первичная обмотка линейного ля вдоль рабочей стороны одной по т л-и пг-
противоположна пориичняч обмотка с со Ьь г,-г.:. гласуюи имися протипопол л; ;н|.1г-« ; , /ппл -,, :
ми KaiyujOK похожи isa сиоему. поггпанпуюр:; на фиг, 1 и 13-16. Уп)аГ ЛС.и- ;ню..(
ем карпток по рабочей пороги. 1 ;:ог;р,/ / гпомд.-:.предпарительного ог;пг -. и кооп/н-;равняющей зоны В, 934-934 для управляющей зоны С и 936-936 для управляющей зоны Д. Группы катушек примыкают ко вторичным обмоткам на каретках вдоль рабочей стороны петель. Они соответствуют таким зонам, как 308, 312, 314 и 423 на фиг. 4, и таким зонам, как Z1, Z4, Z5 и Z10 на фиг. 13-16. Всякий раз, когда каретки необходимо разделить, управляющим зонам даются такие размеры, что для ряда требуемый условий работы в управляющей зоне никогда не будет более одной пары кареток при продвижении пар кареток симметрично вдоль первичной обмотки. Однако каретки в управляющей зоне 1-й постоянной скорости 930 близко примыкают друг к другу с промежутками, кратными целому числу лямбда, и перемещаются на одной и той же скорости, поэтому в данной управляющей зоне может быть много кареток.
Фиг. 18 показывает типовой разрез (фиг. 17) через рабочую сторону 910 пегли 900. В виде сбоку показана каретка 940. Предусмотрена направляющая дорожка 942. идущая вдоль петли 900 как по рабочей, так и по возвратной сторонам и соединяющая рабочую и возвра гную стороны. Дорожка поддерживается посредством крепл гия к раме 962. Каретка укреплена на направляющей дорожке восемью роликами 944, 946, 948, 950, 952, 954, 956 и 958, которые вра- щательно посажены на корпус каретки 960. Ролики выравнены с чередованием и сдвинуты в машинном или продольном направлении (внутрь фиг. 18) для обеспечения стабильной поддержки каретки. Другими словами,ролики горизонтальной контурной поверхности 944 и 958 выравнены продольно, в то же время горизонтальные ролики 946 и 956 также продольно вырэонены. но сдвинуты или смещены от роликоп 944 и 958 в продольном направлении. Подобным же образом, ролики вертикальной контурной поверхности 948 и 952 продольно вырзвне- ны, в то же время вертикальные ролики 950 и 954 также продольно вырапнены, но смещены относительно роликов 948 и 952 в продольном направлении. Можно использовать другое количество роликов или передвигающих элементов, лишь бы каретка стабильно поддерживалась для свободного скользящего или вращательного движения по направляющей дорожке. Возможно наличие дополнительных дорожек. Ролики удерживают каретку в точном положении на дорожке и несут нагрузки, определяемые весом каретки, напряжением пленки 961, зажатой пленочным зажимом, осевым давлением двигателя и несбалансированными
магнитными силами между первичной и вторичной обмотками.
К корпусу каретки 960 также прикреплен рычаг 964 зажима пленки, шлрнирно
соединенный с позицией 966. Захватывающая поверхность 968 подвижно крепится на оси для прижима пленки к поверхности 970, которая стопорит вращательное движение. Пленка зажимается, как показано на фиг.
0 18, путем надавливания на рычаг 964 в ка- правлении стрелки 972, а освобождается посредством нажима на рычаг в направлении стрелки 974. Верхний край рычага 964 образует кулачок, повторяющий поверхности
5 963 и 965, которые управляются кулачковыми поверхностями вдоль направляющей дорожки. На фиг, 17 поверхности 967 и 969 на входе перемещают рычаг с целью зажима пленки, а поверхности 971 и 973 на выходе
0 растяжной рамы перемещают рычаг с целью освобождения пленки. Между рычагом 964 и корпусом каретки 960 можно подсоединить подходящие упругие узлы, такие как пружины, чтобы удерживать зажим в
5 открытом или закрытом положении с тем, чтобы форсировался в противоположное положение только под воздействием кулачковых поверхностей. Такое размещение предпочтительно, потому что
0 кулачки 967, 969, 971 и 973 необходимо поставить только на входе и выходе растяжной рамы, чтобы открывать и закрывать зажимы. Поперечный размер (внутрь фиг. 18) поверхности 968 и накованной поверхности 970
5 узок, что обеспечивает свободное движение пленки, когда она натягивается между зажимами.
Вверху и внизу корпуса каретки 960 прикреплены синхронные вторичные об0 мотки 976 и 978. Они состоят из магнитов, расположенных в позициях 980 и 982 и трансформаторного железа 984 и 986 подобно вторичным обмоткам 160 и 170, показанным на фиг. 2, по существу, магниты в
5 позиции 980 будут состоять из одного магнита, ориентированного северным полюсом наружу, и второго соседнего магнита, расположенного на удалении одной лямбда южным полюсом наружу. Как показано на
0 фиг. 2 , что касается вторичных обмоток 160 и 170, то предпочтительно, чтобы вторичные обмотки на соседних каретках имели обратное расположение своих псг,;осов. Также, когда соседние каретки имеют наименьший
5 интервал, что в растяжной раме имеет место при примыкающих корпусах кареток, магнитные границы вторичных обмоток будут иметь между собой промежуток R одну лямбда. Перейдя к одной клретке. отпетим. что магнит возле передней стсгони слр мки
верхней вторичной обмотке и магнит возле передней стороны каретки на нижней вторичной обмотке будут оба иметь одинаковые обращенные наружу полюса. Например, как верхняя, так и нижняя вто- ричные обмотки будут иметь северные полюса возле передней стороны каретки.
Во вход растяжной рамы в позиции 920 зажимные каретки должны входить с известным интервалом в синхронности с ЭМ волной в первой управляющей зоне А, До запуска машины каретки прижимают одну к другой, примыкая корпуса кареток 960, а первую каретку удерживают неподвижно, скажем о позиции 921. Это устанавливает промежуток известной неизменной величины, при которой магнитный полюсный шаг клреточных вторичных обмоток согласован с полюсным шагом ЭМ волны, определяемым катушками первичной обмотки; в этом случае первичной обмоткой является управляющая зона А. Для прижимания кареток друг к другу можно использовать ряд средств, например, средства линейного двигателя, средства конвейерного ремня, гравитационные средства и т.д. Так как предпочтительный вариант устройства имеет каретки с двумя различными полярностями по обеим рабочим сторонам в позиции 921 должна быть установлена каретка над- лежащей полярности. Например, если стартовая ЭМ волна требует северного магнита возле передней стороны каретки в позиции 921 на рабочей стороне 910, то северный магнит также требуется возле передней сто- роны каретки 921 на рабочей стороне 912. Это действительно, когда магнитная полярность на соседних кареточных вторичных обмотках реверсирована. Очевидно, что, когда используются такие как эти каретки переменной полярности, с каждой траектории всегда должно быть четное число кареток, чтобы сохранялось з-.и чередующееся реверсирование полярностей по мере непрерывной циркуляции кареток в петлях.
После того, как установлена такая предстартовая ориентация кареток, а остальная часть рабочих сторон траекторий кареток не имеет, можно запускать растяжную раму - каретки будут продвигаться одна за другой по рабочим сторонам в синхронности с ЭМ волнами и возвращаться по ответным сторонам, как показано на фиг. 17. Если рабочая сторона растяжной рамы останавливается под управлением, можно сохранять относительные положения кареток с тем, чтобы при перезапуске не требовалось повторного выравнивания кареток.
В позициях 908 и 990 над и под каретками находятся удлиненные первичные обмотки, которые разделены на упраплчющчг зоны. Типовая структура первичной огЗмот ки показана на фиг. 2 (обозначения 182 и 184). Она обычно состоит из катушек, ралме щенных в пазах между пластинчатыми металлическими зубьями. Заранее определенный переменный ток подается на первичные обмотки через проводники 992 и 994. Использование как верхней, так и нижней первичных обмоток обеспечивает приложение к каретке максимальной силы посредством одновременного продвижения обеих вторичных обмоток 976 и 978. На некоторых участках растяжной рамы, где максимальная сила не требуется, можно исключить одну аерхнюю или нижнюю первичную обмотку. Однако верхняя и нижняя первичные обмотки обеспечивают каретку сбалансированной магнитной силой притяжения, поэтому, когда одна из них исключается, нагрузка на вертикально расположенные на каретке ролики увеличивается. Первичные обмотки расположены в непосредственной близости от кареточных вторичных обмоток, их разделяют лишь небольшие зазоры 996 и 998.
Вдоль рабочей стороны растяжной рамы каждая первичная обмотка включает ряд групп катушек, причем группы катушек одной первичной обмотки согласованы по размеру с группами катушек другой первичной обмотки, а каждая из противоположны групп катушек объединена электрически и определяет одну управляющую зону. Такие управляющие зоны управляются независимо и все их группы катушек получают согла- сование или одинаковые приводные команды одновременно. В предыдущем описании системы линейного синхронного двигателя фиг, 4 для одной первичной обмотки зона состояла только из единственной группы катушечной намотки, которой требовались зональное приводное устройство и зональный контроллер для независимого управления этой единственной группой катушечных намоток. Управляющая зона в описании для растяжной рамы состоит из противоположных групп катушечных намоток.
Управляющая зона для первичных обмоток обеих петель в предпочтительном варианте состоит из четырех групп первичных катушек. Что касается управляющей зоны С. включающей группы катушек 934-934 , то она состоит из первой группы верхних катушек и второй группы нижних катушек на рабочей стороне 910, а также из третьей группы верхних катушек и четвертой группы нижних катушек на рабочей стороне 912. Группы катушек в управляющей зс:;с С электрически связаны ее средством зонального привода 1000. Это приводное средство может состоять из одного зонального привод- ного устройства, например 114, схематично показано на фиг. 1, и более подробно на Фиг. 8, или из двух зональных приводных устройств, по одному для верхней и нижней групп катушек на каждой рабочей стороне, мли из четырех зональных приводных устройств, по одному для каждой группы кагу шек в управляющей зоне. Выбор количество используемых зональных приводных устройств записиг от согласования питания между требованиями по питанию каждой группы катушек относительно номинального питляия зонального приводного устрой- сгоа. Группы катушек можно электрически подсоединить к зональному приводному устройству или зональным приводным устройствам последовательно, параллельно или последонатепыю/параллельно, что также зависит от указанного согласования по питанию. Важно то, чтобы средство зонального контроллера, такое как 1002 длч управляющей зоны С, было общим длч всех зональных приводных устройств этой зоны. Это средство зонального контроллера может быть одиночным зональным контроллером, как указано обозначением 132 на фиг. 1 и более подробно показано нз фиг, 5, исходя из соображений емкости контроллера, им могут быть два или более зональных контроллеров, хранящих идентичные управляющие команды. Когда п предпочтительном варианте осуществления средство зонального привода 1000 состоит из единственного зонального приводного устройства, средство зонального контроллера 1002 состоит из единственного зонального кочт- роллерз, а катушки, такие как, например, 146 нз фиг. 1, представляют все четыре группы катушек с управляющей зоне растяжной рамы, то фиг. 1 изображает харок- терную часть управляющей системы для рамы растяжения пленки с линейным двигателем.
Также необходимо иметь ввиду, что часть управляющей зоны в пределах одной первичной катушечной группы, например, нижняя первичная обмотка рабочей стороны 910 зоны постоянной скорости А, может быть поделена ь-з подгруппы катушек с за- питыванием кождой подгруппы от отдельных приводных устройств. Однако все зональные приводные устройства будут одновременно получать одни и те же команды от одного или нескольких контроллеров, когда псе эти подфуппи катушек работают как одна управляющая зона
Аналогично тому, как характерна управляющая зона С подсоединена к српдг тву зонального привода и к средству зонапьно- го-контроллера, так же подсоединены соот- ветстпенно к зонэлмным приводным устройствам 1004, 1006 и 1008 и зональным контроллерам 1010, 1012 и 1014 характерные управляющие зоны А, В и Д, По аналогии с фиг, 1 все зональные контроллеры
0
соединены с центральным контроллером
1016, который соответствует центральному контроллеру 108 и центральной программируемой схеме базового тактирования фиг. 1. Центральный и зональные контроллеры так5 же связаны с системным компьютером 1018, соответствующим системному компьютеру 100 на фиг. 1. который на фиг. 17 показан подсоединенным только к центральному контроллеру 1016,
0 Все зональные контроллеры в управляющей системе растяжной рамы имеют структ/ру, соответствующую фиг. 5, и включают память первого устойчивого состояния, такую как 404, для задействования
5 управляющей зоны в рабочих условиях первого устойчивого состояния; память второго устойчивого состояния, такую как 412, для задействования управляющей зоны в условиях работы второго устойчивого состояния;
0 и третью, переходную память, такую как 408, для задействования управляющей зоны с целью обеспечения перехода из рабочих условий первого устойчивого состояния в рабочие условия второго устойчивого состо5 яния. В растяжной раме эта способность перехода из одних рабочих условий устойчивого состояния в другие позволяет растяжной раме менять степень вытяжки в машинном направлении, переходя от одной
0 рабочей степени непрерывной вытяжки к другой, не останавливая вытяжку полотна материала.
Особенность, заключающаяся в способности быстро менять рабочие состояния,
5 т.е. степень вытяжки, для управляющих зон без останова продвижения кареток зажимов растяжной рамы через управляющие зоны дает растяжной раме согласно изобретению уникальные возможности. Во-пер0 вых, она позволяет запустить растяжную раму и начать протягивать пленку с низкой степенью одновременной двуосной вытяжки первого устойчивого состояния, а затем, продолжая непрерывно вытягивать пленку,
5 перейти к более высокой степени одновременной двуосной вытяжки устойчивого состояния. Во-вторых, она позволяет осуществить точную регулировку степени одновременной двуосной РО время работы для оптимизации и достижения невозможного ранее качества пленки, так как рамы одновременной двуосной растяжки известного уровня техники дают возможность выполнять только дискретные изменения степени вытяжки в машинном направлении путем длительных и дорогостоящих остановок линии.
Во время работы также можно настраивать и точно регулировать вытяжку а поперечном направлении при помощи дискретно регулируемых настроечных винтов, таких как 907, которые смещают траектории друг к другу или наоборот. Дорожки сгибаются и передвигаются а точках изгиба траекторий длп адаптации углопыхлизмене- ни1. Такие приемы поперечной регулировки ужо известны. Винты и подвижно установленные гайки для регулировки ширины растяжной рамы имеют винтовой сегмент с правой резьбой (поз. 911 и гайки 913 и 915} для одной из траекторий и винтовой сегмент с левой резьбой (поз. 917 и гайки 919 и 909) для другой траектории. Таким путем вращение установленного на оси винта (например, 907) передвинет две траектории и противоположных направлениях друг к другу или наоборот. Двигатель 905, прикрепленный к винтам и управляемый оператором, осущестпляет вращение винтов до работы растяжной рамы и во время ее. Таким образом, при необходимости можно менять степени вытяжки как в машинном, так и о поперечном нзпрЭЕЗлениях, не останавливая непрерывную двуосную вытяжку полотна.
При низких степенях вытяжки в машинном и поперечном направлениях относительно легко осуществляется протягивание пленки, в то время как при более высоких степенях вытяжки многие пленочные полимеры, такие как полиэтиленовые терефта- латные пленки, часто разрываются н ломаются.
После прогона пленки при низкой степени вытяжки в машинном и поперечном направлениях с помощью данного устройст- ва можно увеличить степень вытяжки в поперечном направлении путем регулировки ширины растяжной рамы и в машинном направлении путем переключения управления зажимами растяжной рамы на третье рабочее состояние перехода, причем степень вытяжки в машинном направлении непре рывно меняется до тех пор. пока не достигает степени вытяжки в машинном направлении второго устойчивого состояния. Затем управляющая система может переключить управление зажимами растяжной рамы на степень вытяжки в машинном направлении второго устойчивого
состояния для непрерывной работы Эю по зволяет осуществлять прогон при высокой степени вытяжки в машинном направлении одновременно по двум осям, чего ранее не 5 удавалось в растяжных рамах известного уровня техники, потому что они работают только с одной фиксированной степенью одновременной двуосной вытяжки в машинном направлении, которая не может быть
0 увеличена, когда она велика. Высокими степенями одновременной двуосной вытяжки в машинном направлении являются те, которые превосходят ЗХ или более предпочтительно 5Х или еще более предпочтительно
5 7Х или в самом предпочтительном варианте 9Х. Это приводит к возможности одновременной двуосной вытяжки пленки, чего нельзя было непрерывно сделать ранее при одноступенчатом вытяжении (одноступен0 чатость означает ограничение пределами одиночного участка вытяжения растяжной рамы).
Из сказанного видно, что в соответствии с изобретением можно точно регулиро5 вать продольное вытяжение пленки благодаря использованию ряда приводимых в действие от линейного двигателя кэ- реточных пар, индивидуально управляемых независимо от других пар в отношении их
0 продольного передвижения. Следовательно, может выполняться как одновременное описанное двуосновное вытяжение пленки/- так и последовательное. В последовательном вытяжении поперечному вытяжению
5 предшествует продольное и наоборот. Если требуется поперечно вытянуть пленку перед продольным вытяжением, скорость кареток в расходящихся частях направляющих дорожек поддерживается
0 постоянной так, что выполняется только поперечное вытяжение, а после этого на участке стабилизации скорость кареток непрерывно увеличивается для осуществления продольной выгяжки пленки. Если тре5 буется такой режим работы, размер некоторых групп катушек, показанных в управляющих зонах фиг. 17, должен быть пересмотрен так, чтобы при разделении кареток в управляющей зоне никогда не бы0 ло более одной пары кареток. Чтобы продольно вытянуть пленку перед поперечным вытяжением, направляющие дорожки в первой части участка вытяжения перенастраиваются для продолжения параллельности, а
5 скорость кареток в параллельной части участка вытяжения постоянно увеличивается для обеспечения продольного вытяжения, после чего скорость кареток сохраняется постоянной, когда дорожка расходится в остальной части участка вытяжения дно обеспечения только поперечного вытяжения. Более того, если требуется выполнить только продольное вытяжение без поперечного, направляющие дорожки с 921 по 929 можно сохранять параллельными, тем самым не производя какого-либо поперечного вытяжения пленки. Аналогично, если требуется выполнить только поперечное вытяжение без продольного, дорожки будут расходиться, как на фиг, 17, но все каретки будут передвигаться с постоянной скоростью, не отдаляясь друг от друга на всей рабочей зоне растяжной рамы.
Преимущества, получаемые изобретением, по существу вытекают из удлиненных стационарных первичных обмоток, поделенных на управляющие зоны, указанные управляющие зоны воздействуют на движущиеся пары синхронных вторичных обмоток линейных двигателей, сообщая заранее определенные скорости кареткам, несущим вторичные обмотки и зажимы растяжной рамы вдоль первичных обмоток. Таким образом, так как каждая пара кареток продвигается независимо (т.е. точно движется независимо от других кареточиых пар), может быть определена программа ускорения для наложения на поперечное пытяжение заранее определенного, управляемого продольного вытяжения. Соответствующим образом, все время можно точно регулировать продольное смещение, приложенное к пленке во время ее движения через участок вытяжения; и также можно точно контролировать скорость пленки в транспортном и стабилизирующем участках. Всякий раз, когда необходимо разделить каретки, выбираются длины управляющей зоны так, чтобы одновременно в группе катушек на первичной обмотке управляющей зоны было не более одной каретки. Тогда, заранее определял частоту
и фазу, подаваемую на каждую зону первичной обмотки, можно достигнуть любого желаемого вытяжения пленки, как например, переменной степени вытяжки в машинном направлении и переменного отношения величины и степени вытяжки МИ-ПН в пределах натянутого участка. Например, скорость деформирования в машинном направлении во время одновременного двуосного натяжения пленки может контролироваться в
различных положениях на участке вытяжения растяжной рамы, Скорость деформирования определяется следующим образом:







| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ СНИЖЕНИЯ ВЛИЯНИЙ ГАРМОНИК НА СИСТЕМУ ДОСТАВКИ ЭНЕРГИИ | 2006 |
|
RU2388133C2 |
| Сканирующее устройство для бумагоделательных машин | 1981 |
|
SU1100348A1 |
| УСТРОЙСТВО И СПОСОБ ПРОВЕРКИ ВНЕШНЕГО ВИДА ТОПЛИВНЫХ СТЕРЖНЕЙ ЯДЕРНОГО РЕАКТОРА | 2004 |
|
RU2367039C2 |
| СИСТЕМА БЕСПЕРЕБОЙНОГО ЭЛЕКТРОПИТАНИЯ | 2001 |
|
RU2212747C2 |
| ДРАЙВЕР СВЕТОДИОДНОЙ ЛАМПЫ И СПОСОБ | 2009 |
|
RU2518525C2 |
| СПОСОБ СОРТИРОВКИ ДОКУМЕНТОВ (ВАРИАНТЫ) | 2005 |
|
RU2344063C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ КОРОТКОГО ЗАМЫКАНИЯ ВЫКЛЮЧАТЕЛЯ | 2001 |
|
RU2233525C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ СМЕШИВАНИЯ МАТЕРИАЛОВ И СПОСОБ СМЕШИВАНИЯ МАТЕРИАЛОВ | 2006 |
|
RU2378042C2 |
| КОММУНИКАЦИОННЫЙ КАБЕЛЬ ДЛЯ НИСХОДЯЩЕЙ СКВАЖИНЫ | 2011 |
|
RU2572605C2 |
| СПОСОБ УПРАВЛЕНИЯ ТИРИСТОРНЫМ ВЫПРЯМИТЕЛЕМ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТИРИСТОРНЫМ ВЫПРЯМИТЕЛЕМ | 1991 |
|
RU2107381C1 |
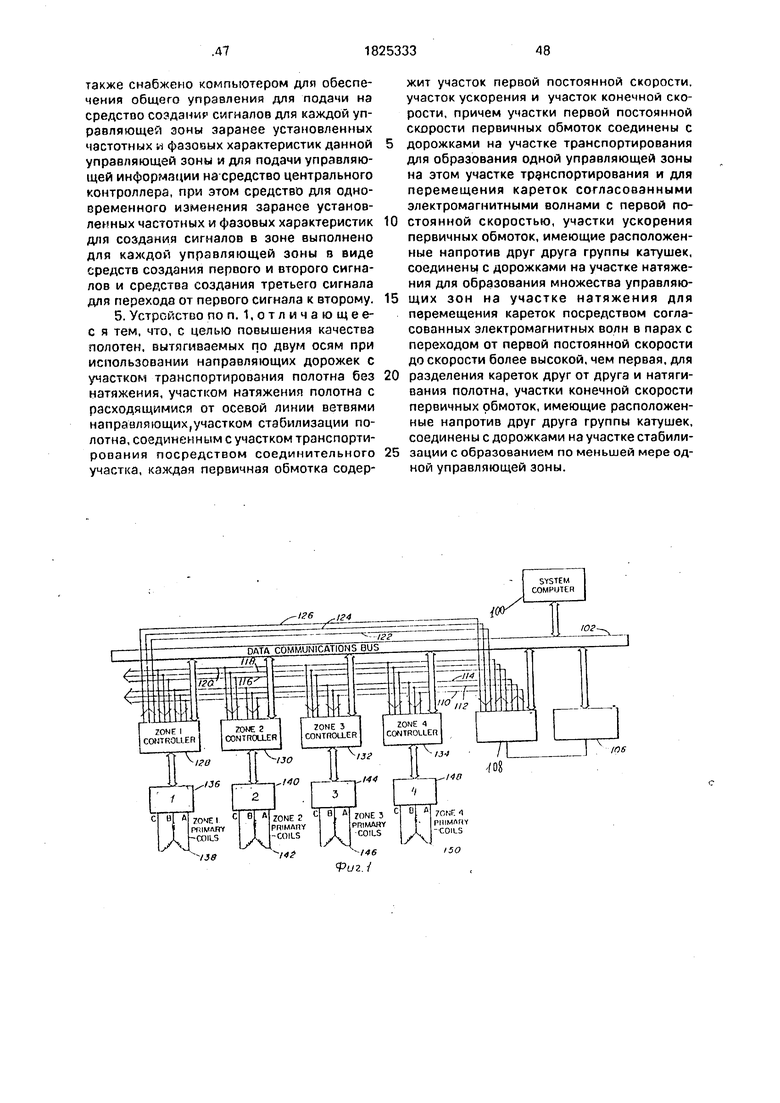

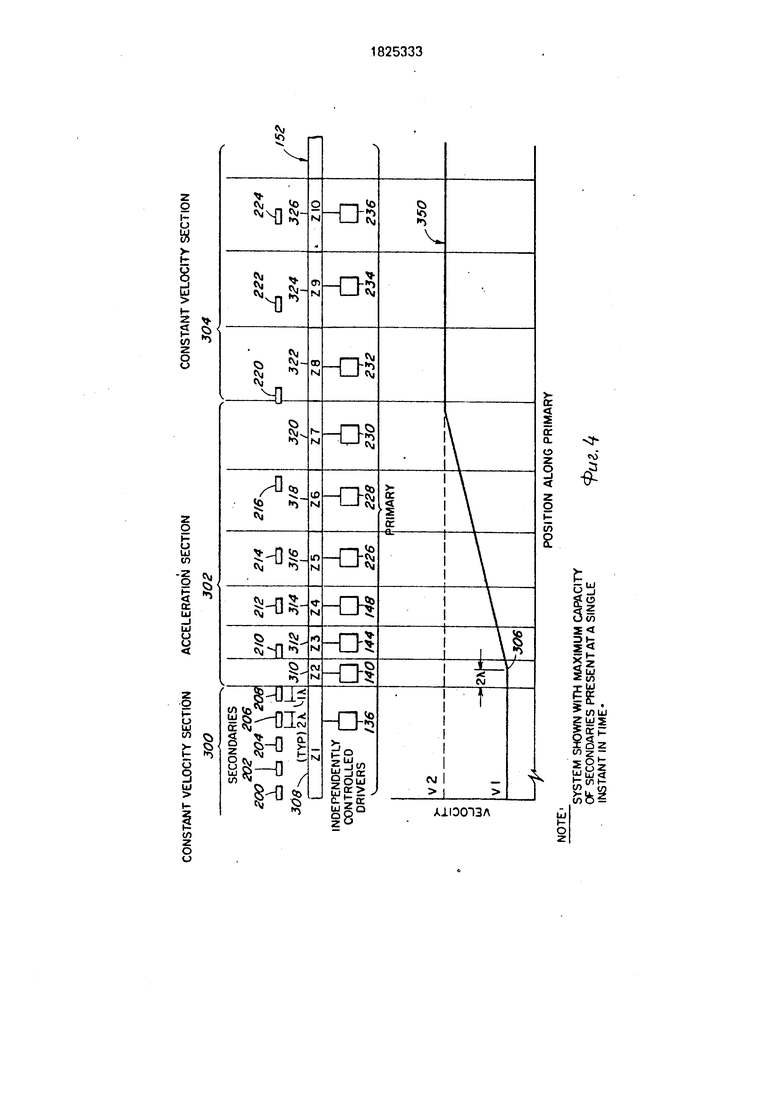
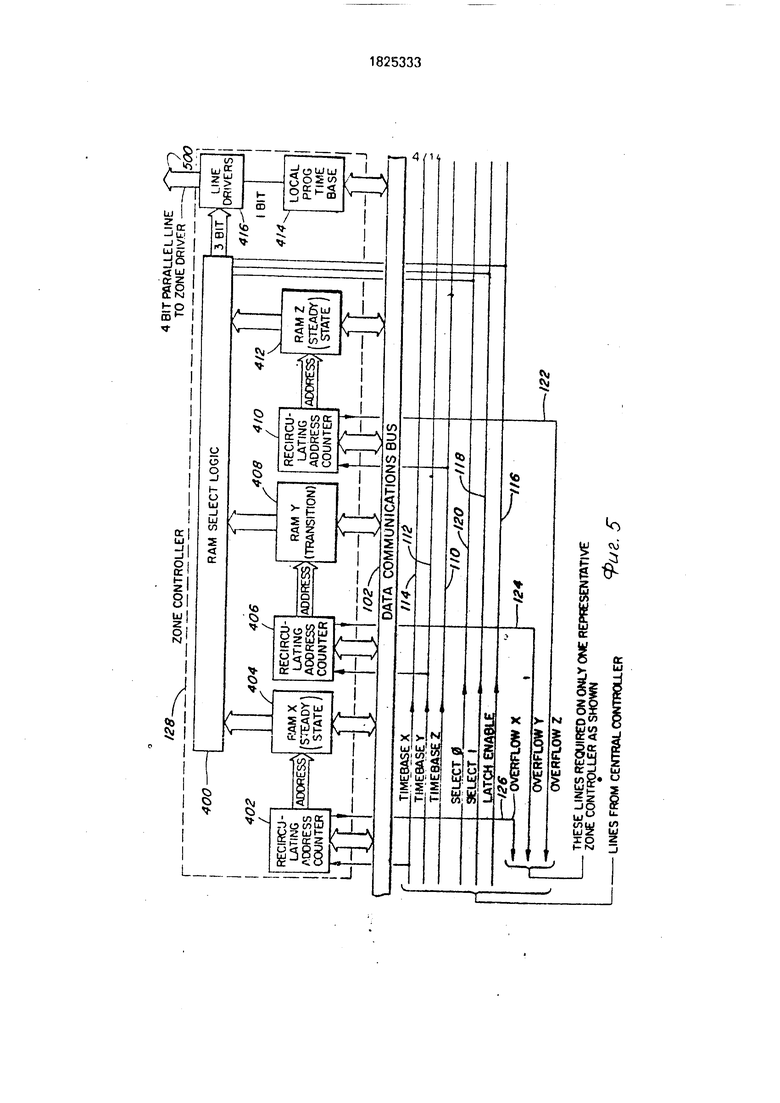
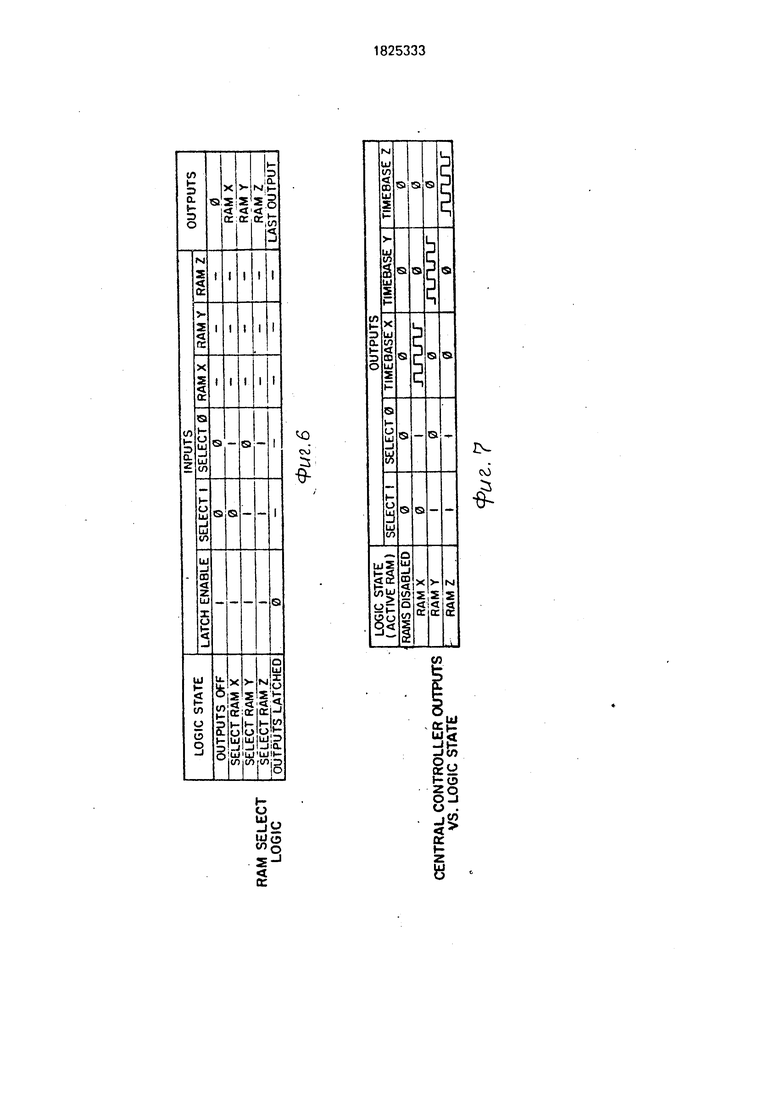
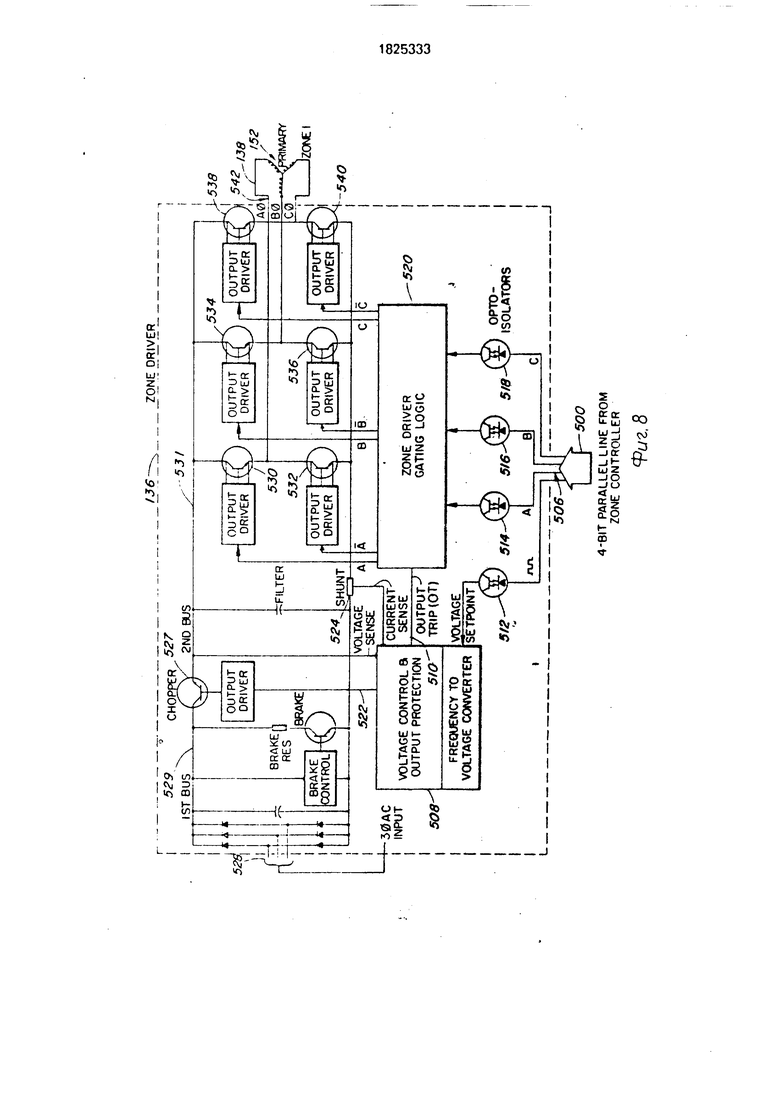

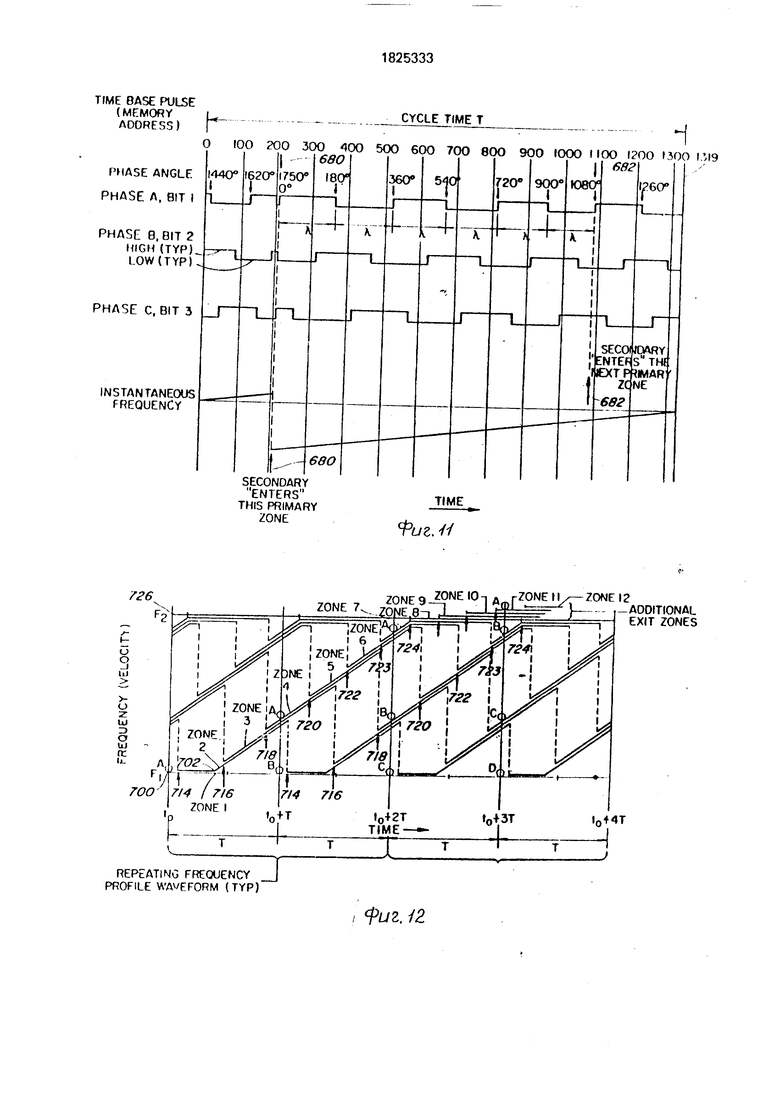



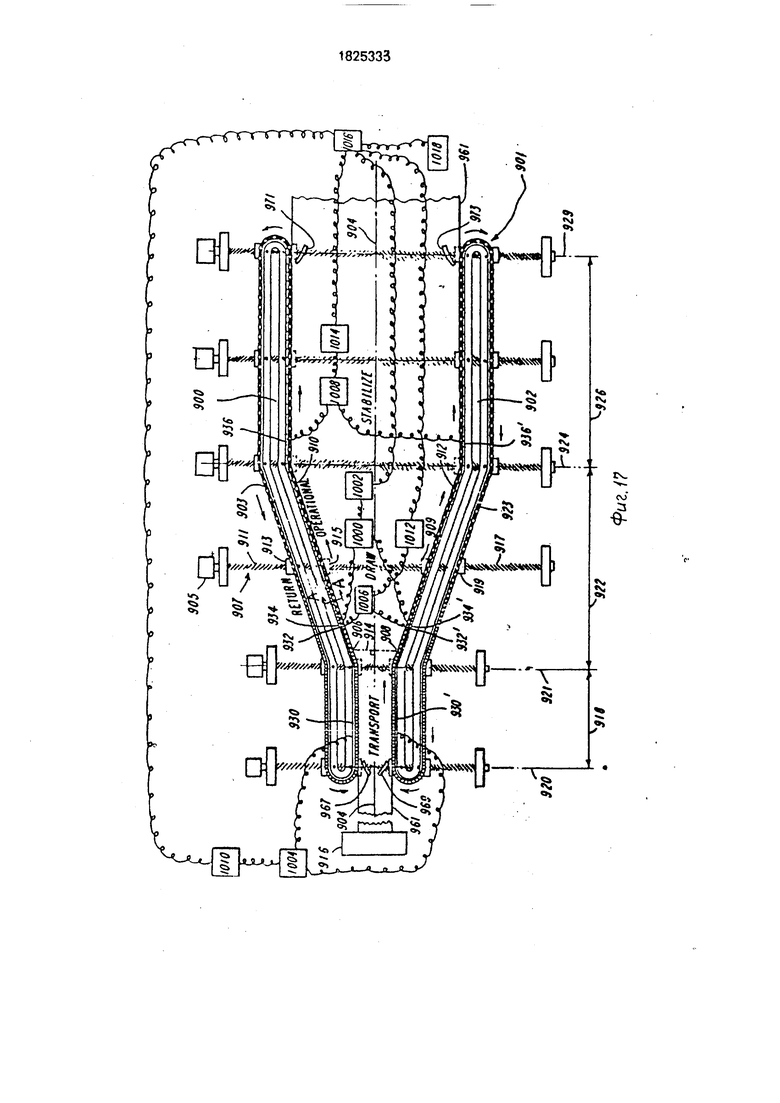

Изобретение относится к устройстаам для непрерывного вытягивания полотна материала и м. б. использовано о химической промышленности для вытягивания полимерной пленки. Цель изобретения - повышение качества полотна за счет обеспечения синхронного перемещения зажимов, управления и регулирования процессом вытягивания. Устройство содержит каретку с растяжными зажимами. Они перемещаются посредством линейного двигателя по замкнутым направляющим дорожкам. Первичная обмотка двигателя расположена рядом с дорожкой. Вторичный элемент прикреплен к каждой каретке. Первичная обмотка образована множеством групп катушек. Они электрически объединены в управляющую зону. Устройстве снабжено средством создания в каждой управляющей зоне сигналов для создания согласованных электромагнитных волн. Зго обеспечивает перемещение кареток через управляющую зону. Устройство снабжено также средством тактирования, средством одновременного изменения во всех управляющих зонах частотных и фазовых характеристик. Со средством создания сигналов соединено средство центрального контроллера. Для обеспечения общего управления предназначен компьютер. Каждая первичная обмотка может иметь участки первой скорости, ускорения и конечной скорости. Данное устройство обеспечивает точный контроль движения кареток при пытяжке пленки в каждой управляющей зоне и из одной зоны в другую. Вытяжка пленки осуществляется, с высокими степенями и линейными скоростями. При этом предотвращается опасность разрыва пленки. 4 з, п, ф-лы, 18 ил. сл С 00 го ел W OJ со
изменение единичной длины пленки после натяжения
единичная длина ненатянутой пленки
деформации в 1 мин
Скорость деформации может контролироваться как постоянная величина через все одновременное натяжение в машинном направлении или же она может постоянно увеличиваться во время одновременного натяжения в машинном направлении или она может быстро увеличиваться, а затем постепенно уменьшаться во время одновременного натяжения. В сравнении с известными растяжными рамами растяжная рама по изобретению может обеспечить в два-три раза большие скорости деформации, потому что для любой заданной регулировки рас- стояния вытяжения а машинном направлении и скорости деформации растяжная рама согласно изобретению может действовать на рабочих скоростях, в два, три, а иногда и десять раз превосходящих скорости любой растяжной рамы известного уровня техники для одновоеменного дсу- осного натяжения. Например, растяжная рама известного уровня техники может
X 100 %/время натяжения
обеспечить рабочие скорости непрерывного выхода пленки лишь не более примерно 500 футов в 1 мин. Растяжная рама по изобретению может обеспечить рабочую скорость выхода пленки около 1200 футов в 1 мин. При вытяжении пленки с такой выходной
скоростью и 5-кратной степенью одновременной двуосной вытяжки в машинном направлении на расстояние около девяти фут при постоянной скорости деформации в машинном направлении получающаяся скорость деформации в машинном направлении составляет приблизительно 32 % в 1 мин.
Чтобы полностью оценить преимущества изобретения, на растяжной раме линейного синхронного двигателя изобретения
одновременно по двум осям в машинном и поперечном направлениях вытягивались полимерные пленки с использованием переменных скоростей, различных степеней вытяжки и т.д. Хотя устройства известного
уропня техники и обеспечивают возможность двуосной вытяжки пленки одновременно в обоих напраплениях, но только при вытяжении пленки на описанном устройстве удалось добиться замечательных свойств пленок по изобретению - пленок, которые по двум осям вытягиваются абсолютно одновременно в обоих направлениях или которые вытягиваются по двум осям, строго контролируемым заранее определенным образом.
Так, вытягивают пленки в обоих направлениях по крайней мере трехкратно со скоростью деформации от 10% мин до 60000%/мин. Предпочтительно пленки могут вытягиваться по крайней мере пятикратно, а в самых предпочтительных вариантах - по крайней мере семикратно и девятикратно. Пленками могут быть любые перечисленные материалы: сложные полиэфиры, например полиэтилен-терефта- лат и полибутен-терефталат, полиамиды, полиакрилаты, полиолефины, например полиэтилен низкого и высокого давления, полипропилен и т.д., сополимеры пропилен-этилен, поликарбонаты, поливи- нилхлорид, полистирол, полиуретаны, поливиниловый спирт, поливинилфторид, полиакрилонитрил, полиамиды, сополимеры этилового и винилового спиртов, пол- ифениленсульфиды,сополимеры
винилиденхлорида и оииилхлорида и сополимеры этилена и олефинонасыщенными мономерами, как например винилацетат, метилметакрилат, этилметакрилат, этилак- рилат, метилакрилат, акрилонитрил, мета- криловая кислота или акриловая кислота И их мономеры.
Особенно предпочтительна двуосно ориентированная полиэтилентерефталат- ная пленка, полученная на устройстве согласно изобретению и обладающая многими хорошими характеристиками, такими как высокая механическая прочность, очень низкая температурная усадка и отличная стабильность размеров, что делает ее наиболее подходящей для использования в качестве базовой пленки магнитных лент и дисков, конденсаторов и т.д. Это в особенности справедливо для тех пленок, которые вытягипаютсл по двум осям пяти-или семикратно.
Формула изобретения
пары направляющих дорожек для клрсюк, расположенных напротив друг . причем первичная обмотка линейного дни ягеля расположена рядом с каждой дорожкой.
5 а синхронный вторичный элемент прикреплен к каждой из кареток, отличающее- с я тем, что, с целью повышения качества полотна путем обеспечения синхронного перемещения зажимов, управления и регу0 лирования процессом вытягивания, каждая первичная обмотка выполнена в виде множества групп катушек, причем группы катушек в одной первичной обмотке согласованы по размерам с противополож5 ными группами катушек в другой первичной обмотке и каждая из противоположных групп катушек электрически объединена для определения управляющей зоны, при этом устройство снабжено средством для
0 одновременного создания противоположным группам катушек в каждой управляющей зоне сигналов с заранее установленными частотными и фазовыми характеристиками для образования согла5 сованных электромагнитных волн в противоположных группах катушек в управляющей зоне для взаимодействия полей вторичных элементов, прикрепленных к кареткам рядом с управляющей зоной, с со0 гласованными электромагнитными волнами и продвижения кареток, симметрично расположенных в противоположных парах, рез управляющую зону.
также снабжено компьютером для обеспечений общего управлений для подачи на средство создание сигналов для каждой управляющей зоны заранее установленных частотных и фазовых характеристик данной управляющей зоны и для подачи управляющей информации на средство центрального контроллера, при этом средство для одновременного изменения заранее установленных частотных и фазовых характеристик для создания сигналов в зоне выполнено для каждой управляющей зоны в виде средств создания первого и второго сигналов и средства создания третьего сигнала для перехода от первого сигнала к второму.
жит участок первой постоянной скорости, участок ускорения и участок конечной скорости, причем участки первой постоянной скорости первичных обмоток соединены с дорожками на участке транспортирования для образования одной управляющей зоны на этом участке транспортирования и для перемещения кареток согласованными электромагнитными волнами с первой постоянной скоростью, участки ускорения первичных обмоток, имеющие расположенные напротив друг друга группы катушек, соединены с дорожками на участке натяжения для образования множества управляющих зон на участке натяжения для перемещения кареток посредством согласованных электромагнитных волн в парах с переходом от первой постоянной скорости до скорости более высокой, чем первая, для разделения кареток друг от друга и натягивания полотна, участки конечной скорости первичных обмоток, имеющие расположенные напротив друг друга группы катушек, соединены с дорожками на участке стабилизации с образованием по меньшей мере одной управляющей зоны.
in в
150
rr
n
CO Ю CN
со
J
S - J fO С in «D
О m
i$
583
z|$
нЈ9
Sm2 ПСЛ
гп
Р н2
г
НС
ii pi
йо
s
СЛ
5
о J
5
о
-о л
§
5
о о
(Л
т
I
i
s
о
И
2сл m
о
Si
2
g
w
о
О
z
CCES28l
LJ7 If---П-4T
II а И « U Ш U
TIMEBASE X
JTHVIEeAS.E.Y
TIMEBASE Z
SELECT 0
SELECT f
LATCH ENABLE
I-IZ6
OVERFLOW X
OVERFLOW Y
124
OVERFLOW Z
. THESE LINES REQUIRED ON ONLY ONE REPRESENTATIVE ZONE CONTROLLER AS SHOWN
- LINES FROM CENTRAL CONTROLLER7 2. 5
/28ZONE CONTROLLER
4 BIT PARALLEL LINE TO ZONE DRIVER RAM SELECT LOGIC
r
406
L
4O8 4IO
/
RAMX - TADY STATE /
RECIRCULATING
ADDRESS
COUNTER
ADDRESS
RAM Y (TRANSITION)
RECIRCULATING
ADDRESS
COUNTER
ADDRESS
« U Ш U
DATA COMMUNICATIONS BUS
//#-.
-11$
00 Ю СЛ CO CJ CO
Z
J
124
-7/tf
-122
CENTRAL CONTROLLER OUTPUTS VS. LOGIC STATE
PU2.6
Фиг.
136
ZONE DRIVER
4-BIT PARALLEL LINE FROM ZONE CONTROLLER
Фиг. 8
Фкг. 3
REPEATING FREQUENCY PROFILE
600
со
So 22:
SB
2 О
|й
E)Uz
FREQ CYCLE
650
d
o
0.0
BEGINNING BINARY INSTRUCTIONS
ll-.fl
TIME CYCLE Т
,/V-ABRUPT / i ore
RESEMTYP)
OPP. PHASE
FREQ CYCLE
OPPOSITE PHASE START
Т
END BINARY INSTRUCTIONS GO BACK TO BEGINNING AND REPEAT
Фиг. 1O
I
TIME BASE PULSE
(MEMORY i CYCLE TIME Т ADDRESS)
0100 POO 50O GOO 700 800 9OO lOOO 1100 (300 I ,19 PHASE ANGLE PHASE A, BIT I
PHASE B, BIT 2 HIGH (TYP) LOW(TYP)
PHASE C, BIT 3
INSTANTANEOUS FREQUENCY
SECONDARY
ENTERS
THIS PRIMARY
ZONE
/26
ZONE 9 ZONEI° ZONE 7. ZgfeVl
1
о
3
I.I
- о
2Г UJ
э о ы
(К
IJ7OO
REPEATING FREQUENCY |
PROFILE WAVEFORM (TYP)
I
00
TIME
Фиг. //
I°
1Ы
ZONE II - ZONE 12
U -ADDITIONAL
1 EXIT ZONES
I0+4T
фиг. /2
ACCELERATION SECTION
FIRST CONSTANT VELOCITY SECTION
I6O
814
PHASE A BINARY / |, ,
WAVEFORM- Lj T-rT J yj tJ T-JT njxnjut FOR CURVE I I прет гпмч тлмт I VARYIKTC «гглмп П 6l
FIRST CONSTANT
VARYING
SECOND
MATCH LINE TO FIG I3C- 3420fm Г Г
T-JT njxnjut I VARYIKTC «гглмп П 6l
VARYING
FREQ
вго
SECOND
1 CONSTANT FREQ
вгг I
7 4
ruu
jiruiruvruuinrij n rinfiru
r ,i i . i i 7 i
OJ
о
4- -Ck
о
+
en
6/ г. 13
оооооо о
++ +.
ОЭЦ)о-
н. н ,
N
Г MATCH LJNE 13О
н
н
H
и
zi3-{Q
Zll«71
SECOND CONSTANT VELOCITY -SECTION
210
т
Z9.,.D.
ZB -
- 36OO
Фиг. {5
POSITION VS TIME CURVES FOR EACH SECONDARY. I-21
60TIME (UNITS- I/3T)
STEADY STATE
-ZONE 5. BINARY INSTRUCTION WAVEFORM 850
ZONE 6. BINARY INSTRUCTION WAVE FORM 86O ZONE 7 BINARY INSTRUCTION WAVEFORM
ero
Фиг, /4
MATCH UHf TO FIG I3A--MATCH LINE TO FIG 13В
Фиъ, 16
ееСЗШ
988 980 996
А-А
Фиг. 18
| Патент США № 3803466, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
| Патент США № 3890421, кл | |||
| Солесос | 1922 |
|
SU29A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
