Изобретение предназначено для отбора проб веществ, осаждающихся на поверхностях различных предметов окружающей среды, с использованием роботов, автооператоров и дистанционно управляемых манипуляторов.
Цель изобретения - повышение интенсификации процесса пробоотбора.
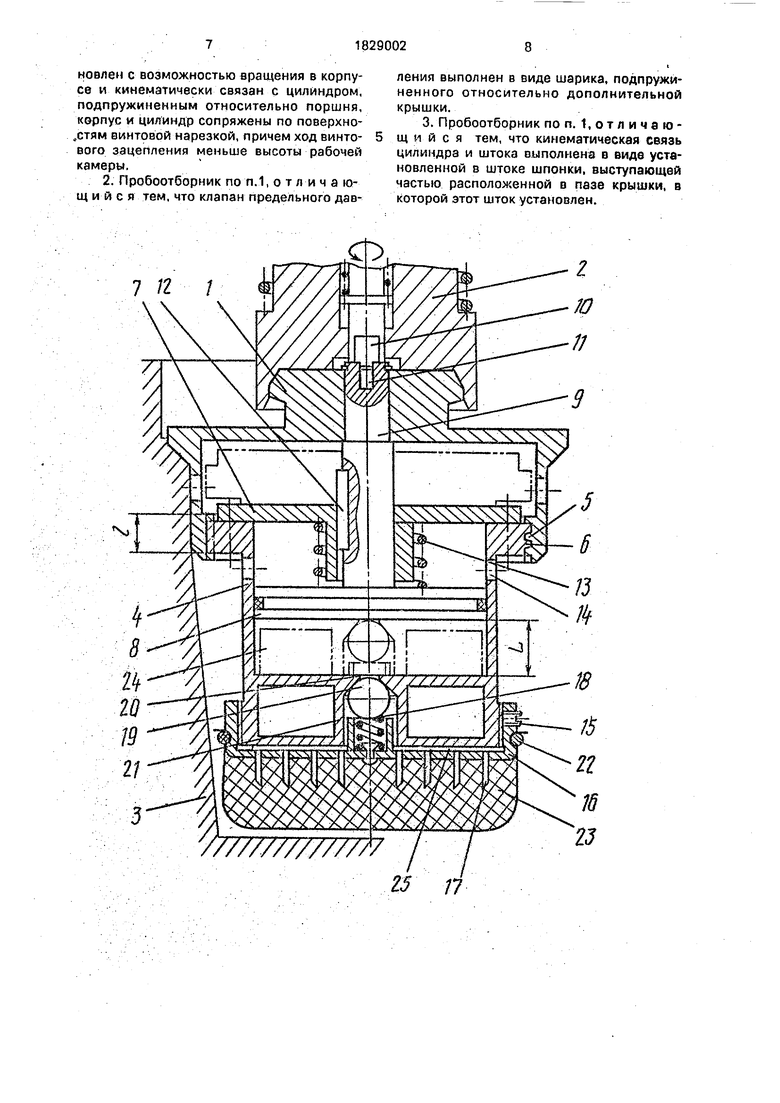
На чертеже изображен пример конкретного выполнения пробоотборника, общий вид.
Устройство содержит корпус 1 еостыко- вочным элементом, предназначенным для жесткого закрепления в стыковочном механизме 2 (показан условно), например, манипулятора (не показан), и базирующим элементом для ориентированной установки пробоотборника в капсуле 3 (изображена условно). Кроме того, устройство содержит полый цилиндр 4. Корпус 1 и цилиндра 4 сопряжены друг с другом по поверхностям с винтовой нарезкой 5 и 6. На цилиндре 4 жестко закреплена крышка 7. Внутри цилиндра 4 герметично размещен поршень 8 со штоком 9, который установлен с возможностью вращения в отверстии корпуса 1 совместно с крышкой 7. Для сцепления с подпружиненным приводным валом 10 стыковочного механизма 2 на торце штока 9 выполнен продольный паз 11, а в свою очею
редь, приводной вал 10 выполнен с плоским концом. Для обеспечения возможности передачи вращения цилиндру 4 шток 9 содержит жестко закрепленную шпонку 12, выступающая часть которой располагается в сквозном пазе крышки 7. Для подпружи- нивания цилиндра 4 между крышкой 7 и торцом поршня 8 установлена винтовая пружина сжатия 13. Для обеспечения беспрепятственного вращательно-поступа- тельного перемещения цилиндра 4. его штоковая полость соединена с атмосферой посредством отверстий 14. На противоположном относительно крышки 7 торце цилиндра 4 жестко закреплена, например, посредством резьбового соединения и сто- порения винтом 15, дополнительная крышка 16 с установленными в равномерно распределенных по площади отверстиях полыми иглами 17 (например, посредством пайки). В гнезде крышки 16 закреплена винтовая пружина сжатия 18, прижимающая шарик 19 к конусной поверхности отверстия 20 в днище.21 цилиндра 4, которое с целью облегчения выполнено пустотелым. Подпружиненный шарик 19 выполняет роль клапана предельного давления/На (закрывающей отверстие 20) крышке 16 закреплен посредством кольца 22 из эластичного материала (например, из резины) тампон 23 из пористого эластичного или волокнистого материала. Тампон 23 закреплен таким образом, что полые иглы 17 крышки 16 входят внутрь его тела. Поршень 8 и днище 21 цилиндра 4 образуют рабочую камеру 24 для заливки жидкости (растворителя), предназначенной для смачивания тампона 23. Высота камеры 24, т.е. расстояние между бесштоковымтор- цем поршня 8 и внутренней поверхностью днища 21 (ход поршня), больше хода винтового зацепления в наружной поверхности 6 цилиндра 4 и нарезной поверхности 5 корпуса Т. Дополнительная крышка 16 с полыми иглами 17 установлена таким образом, что ее внутренняя торцевая поверхность и наружная поверхность днища 21 цилиндра 4 не прилегают друг к другу, а установлены с зазором и образуют дополнительную камеру 25 для равномерной подачи смачивающей жидкости в полые иглы 17.
Пробоотборник работает следующим образом.
Подготовка устройства к работе заключается в том, что в рабочую камеру 2.4 зали- вают смачивающую жидкость через отверстие 20 в днище 21 цилиндра 4, После заливки жидкости устанавливают шарик 19, а затем завинчивают крышку 16с пружиной 18 и стопорят ее винтом 15. На пробоотборнике закрепляют свежий тампон 23 и помещают в капсулу 3 с герметичной крышкой (не показана), обеспечивающей возможность дистанционного открытия и закрытия.
Герметично закрытую капсулу 3 устанавливают на каком-либо транспортном средстве, снабженном механизмом дистанционного открытия и закрытия этой капсулы, а также дистанционно управляемым манипулятором.
После доставки на место проведения пробоотборных работ крышка капсулы 3 открывается и стыковочный механизм 2 манипулятора подводится к стыковочному элементу корпуса 1. После пристыковки
пробоотборника включают привод (не показан) стыковочного механизма 2, обеспечивающий вращение приводного вала 10, манипулятором перемещают пробоотборник в зону намеченных пробоотборных работ и устанавливают его в положение перпендикулярное к поверхности, намеченной для отбора проб.
При вращении приводного вала 10 его плоский конец западает в прорезь 11, что
обеспечивает вращение штока 9. Направление вращения приводного вала 1.0 должно быть противоположным направлению винтовых нарезок 5 и 6 на корпусе 1 и цилиндра 4. Цилиндр 4 с крышкой 7 вращается вместе
со штоком 9 и за счет винтовой передачи перемещается в осевом направлении в сторону стыковочного элемента корпуса 1. Указанное перемещение цилиндра 4 вызывает повышение давления жидкости в рабочей
камере 24. При достижении давления смачивающей жидкости предельной величины заданной пружиной 18 происходит отход шарика 19 от конической поверхности отверстия 20 в днище 21 цилиндра 4 за счет
сжатия пружины 18. Через Образовавшуюся щель между конической поверхностью отверстия 20 и шариком 19 жидкость поступает в дополнительную камеру 25, и, равномерно распределяясь по полым иглам
17, истекая из них во внутрь тампона 23, обеспечивает его равномерное смачизание. За счет того, что ход винтового зацепления нарезных поверхностей 5 и б корпуса 1 и цилиндра 4 меньше высоты полости 24 (хода
поршня), последний выходит из винтового зацепления до того, как займет крайнее положение. После выхода цилиндра 4 из винтового зацепления с корпусом 1 движение первого продолжается под воздействием
сжатой пружины 13. При достижении цилиндром 4 крайнего положения вся жидкость из полости 24 вытесняется и шарик 19 под воздействием пружины 18 прижимается к конической поверхности отверстия 20 в днище
21 этого цилиндра и перекрывает это отверстие.
После окончания времени, необходимого для полного опорожнения полости 24, пробоотборник прижимают к поверхности, намеченной для отбора пробы тампоном 23. Происходит растворение отбираемых веществ в жидкости, вытесненной из пор тампона 23 в результате его деформации. Если поверхность, намеченная для пробоотбора, достаточно ровная, то процесс отбора пробы может осуществляться без выключения привода стыковочного механизма манипулятора, т.е. при вращающемся цилиндре 4 с тампоном 23.
После окончания времени, необходимого для растворения отбираемых веществ, пробоотборник медленно отводят от поверхности пробоотбора и, в результате того, что тампон 23 приобретает первоначальную форму.. Жидкость с растворенными в ней веществами всасывается обратно в пары. Путем многократного повторения указанной операции обрабатывается вся поверхность, намеченная для пробоотбора. и жидкость в порах тампона 21 насыщается отбираемыми веществами.
Равномерный прижим пробоотборника к поверхности пробоотбора может быть обеспечен, например, путем выполнения стыковочного механизма 2 манипулятора подпружиненным и установки датчика (не показан) в конце его упругого хода.
После окончания пробоотборных работ пробоотборник устанавливают обратно в капсулу 3, закрывают и транспортируют к месту проведения аналитических работ.
На месте проведения аналитических работ пробоотборник вынимают из капсулы 3, снимают тампон 23 и отправляют его на . исследования, а пробоотборник и эту капсулу промывают. Затем пробоотборник вновь, заправляют смачивающей жидкостью, снабжают свежим тампоном 23 и герметично закрывают в капсуле 3. Для заправки пробоотборника жидкостью сжимают пружину 13 путем силового воздействия на цилиндр 4 и ввинчивают его в корпус 1,
. Установка между крышкой 7 и поршнем 8 пружины 13 исключает возможность контакта цилиндра 4 и корпуса 1 после выхода из винтового зацепления и, следовательно, исключает возможность быстрого износа заходных участков их винтовых нарезок 5 и 6.
Введение жидкости непосредственно в тело тампона 23 обеспечивает его равномерное и быстрое смачивание, а также возможность одновременного осуществления процесса смачивания и других манипуляций
с пробоотборником, т.к. смачивание возможно при любом положении последнего в пространстве. Эффективность смачивания тампона 23 практически не зависит от впи- 5 тывающих свойств материала, из которого он изготовлен.
Предлагаемый пробоотборник обеспечивает возможность механического дистанционного манипулирования устройством.
0 Отбор проб при вращающемся тампоне 23 способствует более интенсивному растворению отбираемых веществ и. следовательно, повышает производительность пробоотборных работ.
5 Предлагаемый пробоотборник имеет технологичную в изготовлении, простую конструкцию. Кинематическая связь элементов устройства осуществляется без каких-либо зубчатых передач.
0 Использование для смачивания тампона 23 и для его вращения в процессе отбора проб одной и той же степени подвижности манипулятора способствует упрощению конструкции последнего.
5 В предлагаемом устройстве нет необходимости в отключении привода стыковочного механизма 2 в строго определенный момент (например/при достижении поршнем 8 крайнего положения), с целью предот0 вращения его поломки, что способствует ограничению числа необходимых функциональных связей и, следовательно, способствует возможности упрощения конструкции стыковочного механизма 2 манипулятора.
5
Формула изобретения 1. Пробоотборник, содержащий корпус, выполненный со стыковочным элементом для закрепления в стыковочном механизме
0 и с базирующим элементом для ориентированной установки в капсуле, а также полый цилиндр с расположенным внутри поршнем, закрытый с одной стороны тампоном . из пористого эластичного или волокнистого
5 материала, а с другой стороны - жестко закрепленной крышкой, в отверстии которой установлен с возможностью осевого перемещения шток поршня, причем поршень образует с Днищем цилиндра рабочую камеру,
0 соединенную через отверстие в днище с дополнительной камерой, образованной днищем и дополнительной крышкой, в которой выполнены равномерно распределенные по площади отверстия, отличающийся
5 тем, что, с целью повышения интенсификации процесса пробоотборника, в отверстиях дополнительной крышки установлены полые иглы, размещенные s тампоне, отверстие в днище цилиндра снабжено клапаном предельного давления, шток поршня установлен с возможностью вращения в корпусе и кинематически связан с цилиндром, подпружиненным относительно поршня, корпус и цилиндр сопряжены по поверхно- „стям винтовой нарезкой, причем ход винтового зацепления меньше высоты рабочей камеры.
2. Пробоотборник по п.1, о т я и ч а ю- щ и и с я тем, что клапан предельного давления выполнен в виде шарика, подпружиненного относительно дополнительной крышки.
3. Пробоотборник по п. 1, отличающий с я тем, что кинематическая связь цилиндра и штока выполнена в виде установленной в штоке шпонки, выступающей частью расположенной в пазе крышки, в которой этот шток установлен.

| название | год | авторы | номер документа |
|---|---|---|---|
| Пробоотборник | 1989 |
|
SU1770806A1 |
| УСТРОЙСТВО ОТБОРА ПРОБ ЖИДКОСТИ | 1998 |
|
RU2139513C1 |
| Пробоотборник | 1990 |
|
SU1727021A1 |
| Пробоотборник для ипытателя пластов | 1980 |
|
SU979627A1 |
| Устройство для отбора проб пластового флюида | 1988 |
|
SU1629524A1 |
| Пробоотборник глубинный | 1988 |
|
SU1562736A1 |
| УСТРОЙСТВО ДЛЯ ОТБОРА ПРОБ ПЛАСТОВОЙ ЖИДКОСТИ В СКВАЖИНЕ | 1992 |
|
RU2066753C1 |
| Глубинный пробоотборник | 1976 |
|
SU692994A1 |
| Устройство для отбора проб атмосферного воздуха в полёте и дозирования их в измерительный прибор для определения суммарной водности | 2024 |
|
RU2834026C1 |
| Пробоотборник | 1986 |
|
SU1444510A1 |
Изобретение может быть использовано при механизации отбора проб веществ, осаждающихся на поверхностях различных предметов окружающей среды. Цель изобретения - интенсификация процесса про- боотбора. Пробоотборник содержит корпус со стыковочным элементом и полый цилиндр со штоком, закрытый с одной стороны тампоном с другой крышкой и кинематически связанный с приводным валом. При вращении приводного вала его плоский конец западает в прорезь, что обеспечивает вращение штока. Цилиндр с крышкой вращается вместе со штоком и за счет винтовой передачи перемещается в осевом направлении, вызывая повышение давления в рабочей камере, под действием которого открывается отверстие в днище цилиндра. Жидкость из рабочей камеры поступает в дополнительную камеру, равномерно распределяясь по полым иглам, смачивает тампон. После выхода цилиндра из винтового зацепления с корпусом движения первого продолжается под воздействием сжатой пружины. При опорожнении рабочей камеры отверстие закрывается, а пробоотборник устанавливается на обрабатываемую поверхность. 2 з.п. ф-лы, 1 ил. сл
7 К
/77777777777777 /
15 я
